基于图像与激光多数据融合的轨枕检测方案研究
2021-03-22 06:26刘沅明
控制与信息技术 2021年1期
刘沅明,张 雷
(株洲时代电子技术有限公司,湖南 株洲 412007)
0 引言
在经济高速发展的过程中,铁路运输扮演着极其重要的角色,而对轨道线路进行快速保养和维护,确保轨道运输安全、舒适与畅通,已经成为铁路运输高速、安全发展的决定性因素之一。随着科技的发展,将更高效、更智能的自动化检测技术应用于轨道维护是轨道交通行业现代化升级的必然趋势。在对捣固车的技术升级中,轨枕的精准检测是实现智能自动化捣固作业的前提。利用图像识别、激光和雷达测距等新技术对目标进行非接触、实时、动态检测识别已成为现阶段检测技术的发展趋势[1]。轨道主要由钢轨、轨枕、道砟等相关部件组合而成,钢轨、轨枕和固定扣件分布密集,排列规律、均匀且几何特点鲜明。特别是轨枕,其排列均匀,轨枕间距大致相等,轨枕上表面相对平整且轨枕外形基本一致,道砟与轨枕纹理区别明显。单一使用图像识别技术检测目标,准确性易受到光照、环境等因素的影响;而在轨道交通的施工中,检测需要极高的准确性,否则可能会造成事故,影响铁路正常通行[2]。因此,可以根据轨道的特征信息,通过不同传感器相结合方式进行检测识别。
目前国内外的铁路检测系统有轨道巡检系统[3]、轨道视觉检测系统(track vision inspection system,TVIS )[4]、激光裂纹测量系统(laser crack measurement system,LCMS )[5]等,但大都是多功能集中式结构。在对已有车型的智能化升级时,通常要求基本不改变原车结构,因此在轨枕检测方面,有必要开发一套分布式模块化结构的小型检测装置。为此,本文提出一种将图像识别、激光雷达测距和位移检测相结合的多维传感器数据融合算法来提升非接触检测的精度和速度;同时采用基于传统图像分割方法的轨枕检测实现方案,在保证性能的同时拥有硬件配置要求低、体积小、模块化等优点。实验结果验证了该检测算法在轨枕智能检测识别的准确性和有效性。
1 图像识别
图像识别就是针对轨枕和道砟的不同特征,利用外围设备获取目标图像,再由计算机根据像素分布有效提取目标的形态、亮度、颜色等特征信息,完成对目标的分割与判别。
1.1 图像分割
将图像识别应用在轨枕检测上,主要工作是如何有效地将轨枕从图像中分割提取出来,即图像分割。每一幅图像都可以用二元函数f(x,v)来表示,量化函数的特征取值,能够得到二维坐标系下的离散函数f(i,j)。此离散函数即数字图像的一般形式,可以用式(1)数学模型表示。

式中:M×N——图像的大小;(i,j)——图像上的像素坐标,在灰度图像中,f(i,j)是图像中对应像素的灰度量化值[6]。
通常图像分割是指把一幅图像中不同的特征区域划分出来,同一区域中的像素特性相似,不同区域间像素点区别较大。实际应用中,通常是提取需要的特征区域。在进行图像分割时,注意要点为轮廓连续性、运算量、非阈值化以及过度分割[7-8]。实际使用时,需要根据分割图像的特征、分割的侧重点等实际需求来选择最优的算法。但基于对轨枕检测的实时性处理要求以及轨道轨枕图像相对统一和固定的特点,传统图像分割方法对设备性能、配置等要求更低,相对更有应用优势。因此,本检测系统的图像识别部分主要问题是如何确定二值图像的分割阈值和有效防止出现局部最优现象。
1.2 基于CFOA算法的图像分割
轨枕图像分割主要考虑图像曝光不均衡导致的分割误差。果蝇优化算法 (fruit fly optimization algorithm,FOA)由于遍历性不强,易出现局部最优问题;混沌增强果蝇优化算法(chaotic-enhanced fruit fly optimization algorithm,CFOA)[9]充分利用混沌序列的遍历性来提高FOA的全局优化性能;将CFOA与聚类分割技术结合,即利用CFOA优化聚类的图像分割算法,可以提升对曝光不均衡图像的分割效果。CFOA算法流程如图1所示。
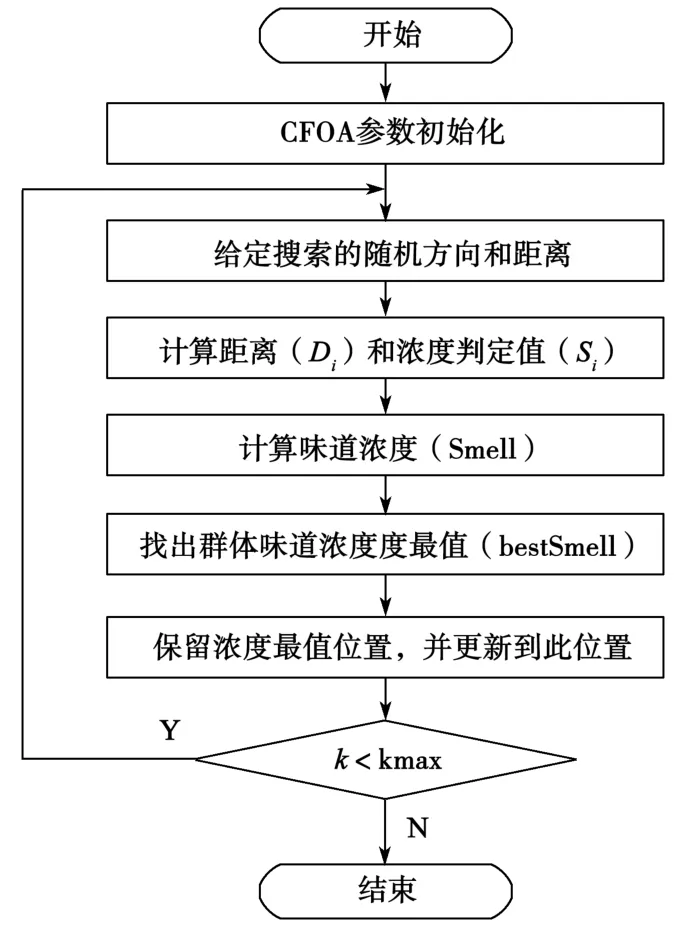
图1 CFOA流程Fig.1 Flow chart of CFOA
1.2.1 初始化算法参数
在初始化过程中,利用式(2)所示混沌序列进行分配和调度,可增加全局搜索解的多样性。

式中:Ui,Li——随机变量取值的范围;M(·)——混沌序列;X_axisi,Y_axisi——图像像素点位置。
1.2.2 搜索寻优过程
在搜索最优值的过程中,针对多模式的局部最优和过早收敛的问题,采用混沌优化技术来解决随机方向和距离的局限性问题:

式中:Xi,Yi——随机搜索过程中像素点位置;R(k)——搜索半径函数;k——迭代数。
R(k)可利用式(4)求出:

式中:kmax——最大迭代数;——多尺度因子,与迭代数成反相关。
在迭代初期,较大的R(k)可以增加全局搜索解的多样性;而在最终迭代中,较小的R(k)可以提升全局解的多样性,通过对的微调探索能强化解决方案。
1.2.3 调整距离(Di)与判断值(Si)
当Di较大时,会使Si相对较小,此时易出现局部收敛与最优现象。为了有效解决此问题,需对距离和判定值的公式进行优化,以最大限度地扩大搜索范围[5]:

1.3 评价指标与算法验证
通过使用经典的聚类分割算法、K均值聚类算法(K-means clustering algorithm,K-means)[10]、多目标优化遗传算法(multi-objective genetic algorithm,MOGA )[11]与CFOA算法对加入噪声的square图像进行分割处理,选择调整兰德指数(adjusted rand index, ARI)[12]和聚类准确率(clustering accuracy,CA)[13]这两个常用的分割质量评价指标来判定分割结果的好坏。图2示出同一噪声图像经过不同算法分割处理后的效果对比。表1是3种算法处理结果的对比。从表1可以看出,随着噪声因子的增强,CA和ARI均逐渐变小,图像分割质量不断下降,而CFOA指标最优,证明了该算法的优越性。

图2 二值图处理效果对比Fig.2 Comparison of binary image processing effects

表1 3种算法处理结果对比Tab.1 Comparison of processing results among the three algorithms
2 激光轨枕检测与位移检测
2.1 激光检测
铁路轨枕大致相同且分布规律、均匀,利用激光雷达测距在轨枕上表面与道砟上表面检测数据出现的平滑度差异的规律性,可以分别识别出轨枕与道砟。由于捣固车在作业过程中存在液力制动、捣固振动等干扰因素,会致使安装在捣固车车体上的激光雷达传感器的检测输出中伴随有这些噪声;同时捣固车在作业工作过程还存在其他高频和低频噪声,都会对检测数据的平滑度和规律性造成影响。智能自动化捣固作业必须基于对轨枕和道砟等数据的及时准确测量,所以滤波处理是获取准确有效的轨枕判断数据的关键环节。从道砟和轨枕的结构可知,轨枕表面相对平整,道砟表面非常不平整,而激光检测所需的数据都是有效信号,所以在保证这两类信号有效的前提下消除其他高低频噪声成为保证数据有效的关键,此时选择合适的滤波算法成为关键环节。
利用低通滤波器的特性,在保留数据本身特点的前提下滤除高频干扰;同时又要有效防止突然出现的振动对检测数据的影响,并且不能出现过大的滤波时延。针对这些要求,本文根据信号波动的实际情况对低通滤波器的滤波权重系数进行动态调整。当信号变化较大时,增大滤波系数的权重值;当信号趋于平缓时,及时减小滤波系数的权重值,使得滤波时间响应加速[14]。改进后的低通滤波器的传递函数为:

式中:ω—— 角频率;fz—— 低通滤波器的截止频率[14],该值的大小影响信号通过的频率大小。
当信号频率f远小于fz时,则A(ω)=1,此时信号可完整通过而不受衰减的影响;而当信号频率f远大于fz时,则A(ω)<1,此时信号会受到衰减。一阶数字低通滤波器算法如下:

式中:Ts——采样周期;Xk,Yk——算法的输入和输出的离散化值。
为了使滤波器能够根据输入信号的变化实时地调整滤波系数的权重值,从而自动调整滤波作用的强弱,需对式(8)中的截止频率进行修正。依据输入信号的波动情况来对滤波器中的截止频率fz进行实时动态调整,其修改后的表达式如下:

式中:β——输入信号前后两次采样值的变化量;α——将β进行滤波处理后得到的相对平滑的变化量。
当β突然变大时,α在短时间内保持不变,此时fz变小,滤波效果加强,输出信号能够快速跟踪输入信号;而当β突然变小时,α在短时间内保持不变,fz变大,滤波时延作用减弱,输出信号能够更好地逼近真实情况[7]。修改后的滤波算法的传递函数为
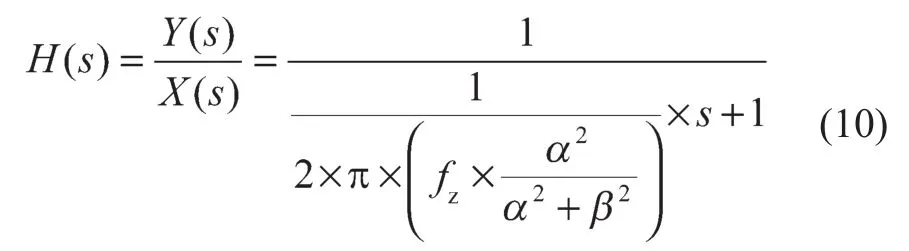
通过式(6)~式(10)所述滤波算法,不仅能够有效消除因高频、低频振动产生的相关噪声,同时还能消除由于捣固头上下运动引发的剧烈振动而产生的突变干扰,从而保证激光雷达测距数据的准确平稳性。
2.2 位移检测
智能化捣固作业不仅仅需要检测出轨枕并判断数量,同时也需要检测轨枕间的间距和轨枕宽度,从而来控制捣固车的位移以及精准捣固下搞。位移检测主要考虑如何有效测量出车轮的运动距离和刹车距离,实际工作时,由于捣固车行驶速度较慢,刹车距离较短,可以根据现场线路实际工况进行一定程度的补偿处理来修正二值图像在与激光检测数据进行数据融合时的位移数据。本方案中位移检测主要利用车轮编码器测量捣固车的运动位移,即捣固车向前的行驶位移。
3 多维数据融合
利用所获取的图像和激光输出数据并结合捣固车的行驶位移数据,将这3种数据通过数据融合算法最终得到实时有效且准确的轨枕数据。多维传感器数据融合的主要目的在于补偿因单一传感器检测数据偏差引起的检测误差,通过多维传感器数据的互补融合,得到最佳的检测结果。数据融合本质上也是一种滤波操作,最终目的都是得到一个准确的检测结果[15]。
本文提出的数据融合算法是,首先利用卡尔曼滤波将图像分割后的数据与激光测距的数据进行数据融合滤波处理,得到有效的激光测距数据;然后再结合位移数据、轨枕间距与轨枕本身特征数据信息,最终确定轨枕检测结果。图3示出数据融合处理流程。

图3 数据融合处理流程图Fig.3 Flow chart of the data fusion processing
卡尔曼滤波是一种用于线性时变系统的自回归滤波算法,能够从观测到的一系列系统输入输出的测量数据中,对系统的状态进行最优估计,其估算精度通常高于基于单一观测方法的[8]。同时,其仅需利用当前观测值和先验估计值及非确定性矩阵,无须更多的历史数据。算法处理过程中,所使用的数据都包含各种噪声和干扰,通过计算估计误差的最小化协方差来获得最优状态估计。本文将这种优化处理方式用于对数据的滤波处理。卡尔曼滤波器处理步骤如下:

式中:A,Ak——系统矩阵,A=Ak;B——控制输入矩阵;H——预测模型矩阵;Kk——滤波权重;Pk|k-1——k-1时刻预估误差协方差矩阵;Pk——k时刻预估误差协方差矩阵;Q——过程噪声协方差矩阵;R——测量噪声协方差矩阵;I——单位矩阵[16]。
对于非线性系统,通常使用离散化的卡尔曼滤波算法,图4示出卡尔曼滤波算法流程。该算法由预测阶段和校正阶段组成。预测阶段,即对预测状态估计计算和对相关误差的协方差矩阵进行计算;而校正阶段,利用卡尔曼增益加权对测量相关项进行校正估计[16]。
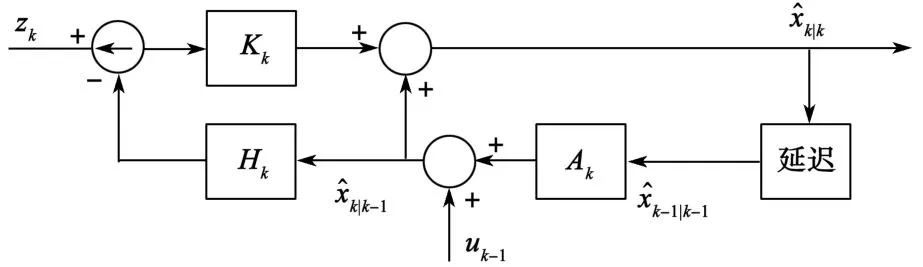
图4 卡尔曼滤波算法流程Fig.4 Flow chart of Kalman filter algorithm
4 实验验证
为了验证所提方案的有效性和实用性,本文将其应用于大型养路机械捣固车智能化自动捣固作业的轨枕检测系统中。
本文的数据融合检测算法方案主要由两个模块化检测模块组成,即获取图像的采集模块与激光测距模块。其中包含对3组数据的处理:第一组是利用分割算法对采集得到的原始图像进行图像分割处理;第二组是对激光测距的原始数据进行滤波处理;第三组是利用卡尔曼滤波融合图像识别与激光测距滤波后的数据,最终输出综合检测结果。在既有捣固车上安装了根据本方案设计的装置,并开展了现场施工验证。具体硬件平台构成如图5所示。
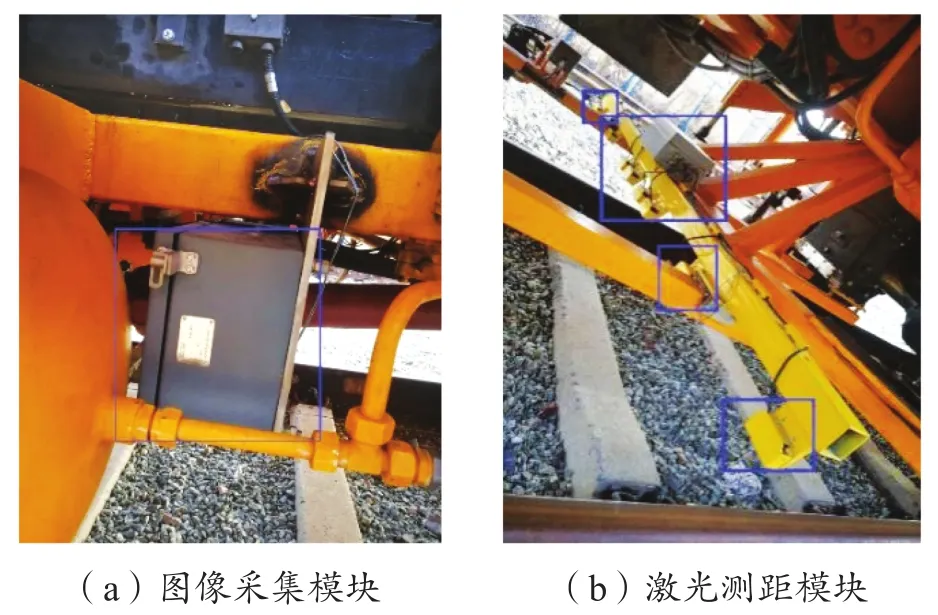
图5 试验硬件平台Fig.5 Test hardware platform
4.1 图像识别
采用本文提出的图像分割算法对轨枕图像进行分割处理,以验证分割算法在轨枕识别检测中的可行性。通过对二值图的分割,可以判定轨枕位置为高光区域,得到位移轴向上的轨枕区域。图6 为轨道轨枕的原始图,图7为经过分割算法处理后的二值化图像。对图7中不同区域进行位移轴向处理,可得到二值分割区域,由于轨枕相对道砟的亮度较高,得到的二值分割区域中,白色区域表示轨枕,黑色区域表示道砟。

图6 轨枕原始图Fig.6 Raw image of sleeper

图7 处理后的二值图Fig.7 Processed binary image
4.2 激光测距
激光测距仪在轨枕上检测的距离值相对偏差较小,而在道砟上检测输出的数据相对波动较大,但两者都会因车辆走行、捣固头振动与夯拍器上下运动及停止等动作产生噪声。激光测量的原始输出数据如图8所示。根据轨枕和道砟表面特性的区别来判定轨枕,需先进行滤波去噪,但同时应避免滤波过度造成无法区分轨枕与道砟。图9示出原始数据经过滤波处理后得到的数据图,可以看出,滤波后的数据更清晰地反映了道砟和轨枕的检测数据平滑度,能更好地分辨轨枕和道砟。

图8 激光测距原始数据Fig.8 Raw data of laser ranging

图9 滤波后距离数据Fig.9 Filtered range data
4.3 数据融合判定轨枕
通过图像识别的二值化分割处理可以得到轨枕的区域,激光测距数据滤波后也能用于判定轨枕的区域,再结合位移的距离,即通过三者的数据融合可更准确地判定轨枕区域,最终输出确定的轨枕位置信号。如图10所示,输出为1表示此处是轨枕,0表示此处为道砟。通过一段1 km轨道的检测结果显示,本方案能够准确地检测出轨枕与道砟区域。将检测结果与实际测量的数据对比,结果显示,在正常的捣固速度下,错误率小于0.5%,轨枕顶面宽度的检测偏差在1 cm范围内(允许范围为2 cm),验证了本文所提融合检测算法方案的有效性。

图10 轨枕检测输出信号Fig.10 Sleeper detection output signal
5 结语
本文围绕捣固车智能化自动捣固控制系统的轨枕识别检测问题展开了相关研究,并提出了一种基于图像与激光多维数据融合的轨枕检测方案。首先,采用一种优越的CFOA与聚类分割相结合方法对图像进行分割,减小了因曝光不均衡导致的局部分割误差。然后,设计了一种改进型自适应低通滤波器对激光雷达测距数据进行处理,有效增强了激光测距对相关噪声和瞬时停顿的抗干扰能力,进一步提高了轨枕检测的可靠性[17]。为了解决单一传感器检测的局限性问题并提高检测系统的冗余性,设计了一种基于卡尔曼滤波的多维数据融合算法,提高了检测精度和稳定性。最后,通过装车考核及现场测试,验证了本方案检测算法的准确性和可靠性。
本方案受限于实际硬件检测条件,在数据融合时,其同步点的位移数据仅由编码轮获得,准确度容易受影响,会造成检测误差,后续将通过增加其他传感器(如:加速度计)同时进行检测方式,以获取更准确的位移数据。目前,该轨枕检测方案在道砟检测部分只是针对其分布区域进行相关的检测,没有对道砟区域的实际道砟量值进行精确检测。后续将优化激光检测数据滤波算法,以便在相同的硬件条件下获得更准确的道砟量数据,为后期智能化补砟提供准确依据。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中国交通信息化(2022年2期)2022-04-26
西南交通大学学报(2022年2期)2022-04-21
铁道学报(2021年11期)2022-01-07
铁道标准设计(2021年5期)2021-05-17
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年16期)2019-09-27
电子制作(2019年9期)2019-05-30
电子制作(2018年19期)2018-11-14
电子制作(2018年16期)2018-09-26