双油缸铲刀回转机构运动学分析与仿真
2021-03-17 11:05苗国华刘淑强
中国工程机械学报 2021年1期
苗国华,王 永,刘淑强
(山东临工工程机械有限公司技术中心,山东临沂276023)
目前,绝大多数平地机采用摆线马达、涡轮减速机、回转架的回转结构,这种结构通过操作手柄控制多路阀阀芯位置,从而使高压液压油驱动摆线马达旋转,再由摆线马达来控制回转转架动作,实现铲刀的360°回转。摆线马达在启动过程中容积效率低、启动扭矩小、启动功率小,在铲刀带有负载的情况下,不能操作铲刀回转,大大降低了平地机的作业效率,并限制了其工作范围。针对上述缺点,苗国华等[1]阐述一种新型平地机铲刀回转机构,并对回转过程回转力矩进行计算。本文对此机构进一步分析,建立其回转过程中的运动学方程,并基于Matlab对不同流量下的运动特性进行仿真分析。
1 双油缸铲刀回转机构运动学
某型号平地机双油缸铲刀回转机构如图1所示,为避免两个回转油缸回转过程中同时出现死点位置使回转架及铲刀不能回转的情况,左回转油缸与右回转油缸在设计及初始安装过程中成90°相位差关系。在连续回转过程中,通过回转阀芯驱动齿轮的驱动,回转阀芯实现同步回转,实现在整个回转过程中左、右回转油缸活塞端,活塞杆端高、低压油的连续规则的切换,保证回转的连续性。在回转过程中,油缸伸出时,作用面积为

油缸缩回时,作用面积为

式中:D为回转油缸缸径,mm;d为回转油缸杆径,mm。
以回转驱动齿轮逆时针旋转为例(回转驱动齿轮与回转架外啮合,回转架及铲刀顺时针旋转),回转臂与回转油缸位置关系如图2所示。

图1 回转机构运动示意图Fig.1 Diagram on rotary mechanism

图2 回转油缸与回转臂位置关系Fig.2 Relation of rotary cylinder and arm
考虑到回转驱动齿轮与回转架齿轮之间存在啮合间隙、回转阀驱动齿轮与回转架齿轮存在啮合间隙、各齿轮的制造误差、回转阀芯的偏差以及回转架与牵引架等装配误差等原因,回转油缸在死点切换时有一定空行程角度,综合上述原因,假定回转油缸在死点附近±7.5°(±0.13 rad)为死点空行程区域,则回转过程中左、右回转油缸作用面积SL、SR分别为


式中:δ为回转臂与回转油缸缸底支点之间连线与回转臂的夹角,弧度;i为0、2、4等偶数。
回转油缸、回转臂与油缸支点和回转臂中心构成三角形,由三角形原理可得

式中:K为回转臂长度,mm;L为回转油缸缸底支点与回转臂回转中心的两点距离,mm;θ为回转油缸、缸底支点与回转臂回转中心两点直线的夹角,rad;δ为回转臂、缸底支点与回转臂回转中心两点连线的夹角,rad;β为回转油缸与回转臂之间的夹角,rad;LEH为回转臂E点与H点距离,mm。
根据左、右回转油缸与回转臂装配时相位差关系和式(4)可得
某型号平地机液压系统工作泵为定量泵,在多路阀全开情况下,工作泵向回转机构提供的流量为

式中:Qsum为供给回转机构流量,mm3/s;νg为工作泵排量,mL/r;n为发动机转速r/min;η为工作泵效率,取0.95。
因铲刀回转机构通过左、右回转臂同时分别使左驱动齿轮与回转架齿轮啮合,右驱动齿轮与回转架啮合,且左、右驱动齿轮齿数相等,因此,铲刀回转过程中任意时刻左、右驱动齿轮角速度相等,即左、右回转臂角速度相同,则

式中:ωL、ωR分别为左、右回转臂角速度,rad/s。因此,左、右回转臂E点圆周线速度vL(rad/s)、vR(rad/s)分别为

左回转油缸、右回转油缸运动所需流量QL(mm3/s)、QR(mm3/s)为

由流量守恒及式(1)~式(9)可知

由式(5)与式(10)可得左、右回转臂(左、右驱动齿轮)角加速度为

令

由式(3)、式(5)、式(8)、式(10)可得铲刀回转一个周期内,左、右回转油缸运动速度vLc(mm/s)、vRc(mm/s)分别为
左、右回转油缸摆动角速度ωRc(rad/s)、ωRc(rad/s)分别为

左、右回转油缸运动加速度αLC、αRC分别为

由式(10)可得铲刀回转角速度ωblade(rad/s)为

式中:Z2为回转齿数;Z1为驱动齿轮齿数。
2 仿真分析
以某型号平地机双油缸摆动回转机构为例,回转油缸缸底支点与回转臂回转中心的两点距离L=644 mm,回转臂长度K=120 mm,回转油缸缸径D=63 mm,回转油缸活塞杆杆径d=35 mm,回转架齿数Z2=55,驱动齿轮齿数Z1=6,工作齿轮泵排量νg=32 mL/r,发动机转速n在800~2 200 r/min之间变化。根据回转机构上述运动学方程,在Matlab中进行编程仿真。铲刀回转一个周期内油缸所用面积和回转臂回转角速度如图3、图4和图5所示
分析图3和图4可知,在一个回转周期,左、右回转油缸总作用面积在四象限内交替周期性变化,但各象限内总作用面积是恒定的,回转周期内回转油缸摆动角度呈周期性变化。分析图5可知,在铲刀回转过程中,铲刀回转角速度(等效于回转臂角速度)是在流量一定情况下(即发动机转速一定值)并不是恒定值而是周期性变化的,且虽然各象限内油缸总作用面积为定值,但各象限内的回转角速度也是变化的。这是因为双油缸摆动回转机构设计时为避免同时处于死点位置,两回转油缸设计成90°相位差关系,同时两个回转油缸通过各自回转臂和驱动齿轮与回转架齿轮共同啮合驱动导致。这与摆线马达加涡轮减速机回转驱动在一定流量下回转速度为定值特性不同。

图3 回转周期内油缸作用面积Fig.3 Cylinder’s area in rotary cycle

图4 回转周期内回转油缸摆动角度Fig.4 Swing angle of swing cylinder in rotary cycle

图5 回转周期内回转臂回转角速度Fig.5 Swing angle velocity of swing arm in rotary cycle
铲刀回转周期内回转臂角加速度特性仿真如图6所示。由仿真分析数据可知,回转臂回转角度分别在0°(360°)、90°、180°及270°即iπ/2(i为整数)时回转臂角加速度存在突变,加速度的突变表明存在冲击力,此冲击力从而会使回转臂带动驱动齿轮与回转架齿轮形成冲击,因为驱动齿轮与回转架齿轮存在啮合间隙,所以冲击瞬间啮合间隙的消除表现为在铲刀回转过程中回转臂角度iπ/2(i为整数)存在冲击响声。这是因为油缸在最小行程、最大行程死点时,油缸运动方向切换和高低压油回路切换造成的,这也解释了双油缸摆动回转过程中存在冲击响声的原因。同时,从仿真分析数据可得,流量越大时加速度突变越大,冲击越大,从而表现为回转死点冲击响声越大,与实际情况相符。

图6 回转周期内回转臂回转角加速度Fig.6 Swing angle acceleration of swing arm in rotary cycle
分析图3、图5和图6可知,回转臂在iπ/2(i为整数)位置附近回转油缸总作用面积、回转臂角速度及回转臂角加速度会有一段小变化区域,这是考虑到各齿轮的啮合间隙、各齿轮的制造误差、回转阀芯的偏差以及回转架与牵引架等装配误差等原因,在死点切换时设定一定空行程角度±7.5°(±0.13 rad)导致。分析图6和图7可知,在死区位置设定一定的空行程角度,能一定程度上降低加速度突变,即降低冲击力,但同时也将加速度突变区域加宽,从而表现为冲击响声较长,另一方面也会影响回转驱动力矩[1]。
铲刀回转周期内左、右回转油缸伸缩速度(伸出方向为正,收缩方向为负)如图8所示,左、右回转油缸伸缩速度也成周期性变化,回转臂角度在iπ/2(i为整数)位置时一侧回转油缸速度达到最大值,另外一侧回转油缸速度则为0,此时,回转油缸处于死点切换位置。同时,回转油缸在iπ/2(i为整数)位置附近有一段平稳区域,也是在死点切换时设定一定空行程角度±7.5°(±0.13 rad)导致。

图7 回转周期内回转臂回转角加速度(未考虑死区)Fig.7 Swing angle acceleration of swing arm in rotary cycle
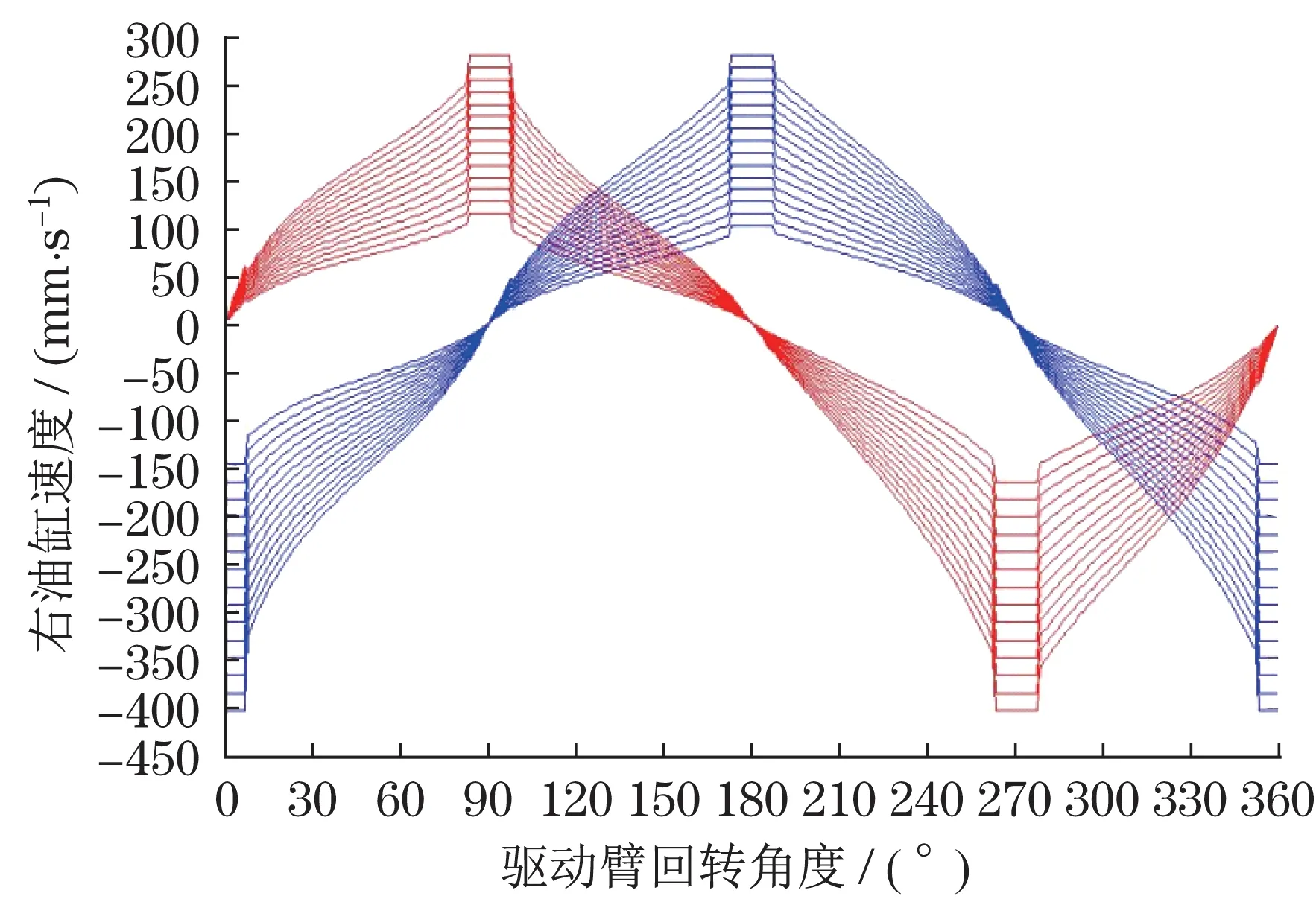
图8 回转周期内左、右回转油缸伸缩速度Fig.8 Movement velocity of left & right swing cylinders in rotary cycle
从上述分析可知,双油缸摆动回转机构在回转过程中回转角速度、加速度等周期性变化,并在回转油缸死点切换区域出现加速度突变,从原理上解释了双油缸摆动回转过程中死点切换存在冲击响声的原因。这是双油缸摆动回转机构固有特性,不能从根本上消除。只能从驱动齿轮、回转架齿轮、回转阀芯驱动齿轮等各关联零部件加工精度及装配精度等方面降低冲击响声。工作液压系统流量越大,回转油缸死点切换时瞬间冲击力就越大,冲击响声也越大,与实际状态相符。
3 结语
本文基于双油缸摆动回转机构各象限运动关系,推导出双油缸摆动回转机构运动学方程。根据运动学方程,编制Matlab仿真程序并基于某型号平地机双油缸摆动回转机构参数实现仿真分析,双油缸摆动回转机构可实现360°连续回转,但回转过程中角速度、角加速度是周期性变化的,且在回转油缸死点切换区域存在加速度突变,进而形成冲击响声,从原理上解释了双油缸摆动回转机构在某区域存在周期性冲击响声的现象。冲击响声是双油缸摆动回转机构的固有特性,不能从根本上消除。但可以从回转臂、回转驱动齿轮、回转架齿轮、回转阀芯齿轮的加工精度以及回转机构的装配精度进行改善,降低冲击响声。工作液压系统流量降低会降低冲击响声,但同时会降低铲刀回转速度,进而影响工作效率。后续还需进一步研究回转油缸在死点位置高低压油液切换时回转阀芯节流孔大小、回转死区大小对回转冲击的影响和改善措施。
猜你喜欢
重庆交通大学学报(自然科学版)(2022年3期)2022-04-21
机械工程师(2020年3期)2020-03-27
扬子江(2019年3期)2019-05-24
作文周刊·小学二年级版(2017年3期)2017-07-12
森林工程(2014年3期)2014-09-13
中国中医药现代远程教育(2014年21期)2014-03-01
筑路机械与施工机械化(2014年7期)2014-03-01
筑路机械与施工机械化(2014年5期)2014-03-01
筑路机械与施工机械化(2014年3期)2014-03-01
筑路机械与施工机械化(2014年3期)2014-03-01