基于农业仓库物流搬运机器人控制算法分析与研究
2021-03-17 11:05霍桂利王晓亮
中国工程机械学报 2021年1期
霍桂利,王晓亮
(1.山西建筑职业技术学院基础教学部,山西晋中030600;2.山西农业大学工学院,山西晋中030801)
随着传感器技术、伺服驱动技术的迅猛发展,高性能实时控制已经可以满足工业控制领域的相关需求。以此为依托,移动机器人也逐渐可满足现代化智能数字工厂中重载部件定位搬运的要求。随着移动机器人性能的不断完善,在农业工程领域得到了良好的应用。如何在更加复杂、边界、极端的环境下解决导航控制问题,使得移动机器人更好地服务于生产与生活,已成为智能移动机器人技术领域的新研究课题。
移动机器人导航技术在学术界中的研究成果已经相对成熟,例如:文献[1]提出了一种新颖的方法,规划移动机器人通往未知环境中的目标的路径,使用传感器发现沿途的新障碍物。该方法通过数值求解热传导偏微分方程,在整个已知环境中合成人工温度梯度,其中在机器人导航期间遇到的“热”且目标是“冷的”。在已知环境网格上的所有其他点处的温度被数值计算,并且连续地更新以考虑新的障碍。文献[2]提出了具有异质能力的多机器人的导航方法。在这种方法中,单个导航具有不同的平移和旋转速度、加速度,感测距离和角度,同时保持全局连接其他机器人。文献[3]使用无监督聚类,基于导航复杂性自动检测周围环境的类型,并限制本地控制器的采样空间。上述文献中所述方法,均依赖于激光对移动机器人进行导航控制,在狭窄环境中机器人的运动极易被障碍物所阻挡,导致机器人停留在原地,机器人运动控制不够灵活。
本文通过对激光雷达数据建模,进而采用几何特征提取的方法,实现地图的创建以及机器人的匹配定位,并通过激光与声呐数据融合的手段,通过感知中远距离以及微距下障碍信息,以模糊逻辑处理的方式,筛选机器人左右轮速输出的最优规则,实现机器人避障行走,所述算法的有效性通过了机器人仿真平台的验证。
1 物流移动机器人控制平台
1.1 物流移动机器人控制平台架构
按照传统自动控制系统的定义,系统的主要组件可分为控制器、传感器以及执行器3大部分,现代智能移动机器人摒弃了陈旧的控制系统结构,基于网络控制系统(Network Control System,NCS)实现执行器群、传感器群以及总控系统间的数据传输以及集中控制[4]。
移动机器人的控制系统架构为:控制平台通过ECAT总线建立硬实时环境,NCS中提供多种硬件接口(I2C、PCI-E、USB以及RJ45等),保障了多种传感器与控制核心的实时通讯。NCS分为输入、输出双通道,多种传感器的反馈数据与伺服驱动电机的控制信号并行于控制网络内部[5]。移动机器人运动的过程中,通过激光传感器完成环境中的伪定位,辅以电机位置传感器来记录机器人的里程信息,根据当前的路径、运动方向等信息,可实现最优路径的规划以及地图信息的匹配,最终实现响应迅速、控制灵活的导航。
2.2 双轮差动控制
移动机器人采用双轮差动方式运动,轮速分别为Vl、Vr,车宽为d,运动轨迹圆半径为r,在Vl≤Vr的状态下,差速所形成的运动轨迹分析如下:

推导为

当Vl>Vr时,情况与此类似,则公式变为r=r趋向正负无穷情况下,车运动轨迹为直线;r=0时,车运动轨迹为原地旋转;r>0时,车体运动轨迹为向左侧旋转;r<0时,车体运动轨迹为向右侧旋转。
此公式用于理想情况下的机器人运动轨迹估算,但在实际应用时,还有机器人运动左右轮转动方向的摩擦力、机器人左右轮装配加工的误差、机器人轴向受力时,机器人轴向被挤压;时,机器人轴向被拉伸;只有当时,机器人轴向力会消失)、机器人质量分布不均匀(导致机器人左右轮所受摩擦力不同)、温湿度等因素的影响(材质摩擦系数变化),所以需要根据实际情况调整Vl和Vr的值,并非是理论给定的轮速。
3 导航定位
3.1 激光雷达数学模型
通过激光雷达按照一定的角度分辨率对机器人的工作环境进行扫描,则各扫描点的平面直角坐标为

式中:ρn为扫描点距离激光中心的距离。
在实际工况中,激光数据受到高斯白噪声的干扰,且每组测量值相互独立。令∇u为噪声us的雅可比矩阵分别为扫描距离与角度的方差,则扫描数据的协方差为
将激光雷达获取的数据转换至世界坐标系中,并令激光扫描点的位姿为Ps=(xs,ys,θs),传感器坐标下的数据为则其在机器人坐标系下的位姿为

其中,

3.2 自主建图
在地图创建过程中,机器人每一时刻的相对位姿可由机器人起始运动处(基坐标)的原点根据机器人模型参数求解,此过程称为伪定位。将激光扫描的临近点经过特征提取后,进行拟合,将获取的环境特征映射至基坐标可得到周围环境中所有障碍相对于基坐标的位置以及方向,将全部特征数据统一进行存储并记录所有特征片段相对于坐标原点的距离以及夹角,即可完成地图的创建。
移动机器人在地图创建后,可通过对当前位置所扫描的环境信息与地图中可提取的特征信息进行相似性比对,用匹配特征信息计算获取当前机器人在基坐标中的位姿,即可完成机器人的定位。室内的主要环境特征信息为相对连续的直线隔断,上述方法可以较好地还原激光雷达对于室内环境的扫描结果。
3.3 定位匹配
地图创建后,根据当前位姿激光雷达的扫描结果,提取前后2帧扫描之间的相对位姿,并对距离最近的m对匹配点进行误差最小化:

可通过当前位置与多段特征直线的垂线的交点的拟合结果,推算出当前所处的位姿:

定位时,越靠近于基坐标原点(即开始创建地图的伪定位起始点)所能得到的直线匹配信息与地图中的特征信息越接近,且各段特征线段中与定位点所形成的夹角越接近于基坐标原点处的结果,机器人处于创建地图起始点处可获得最佳的定位精度以及速度。由于地图创建过程,是根据机器人相对于基坐标原点的位置和角度偏移主要依赖于激光以及机器人里程信息,故高精度的激光、里程计可减小地图创建以及定位的误差。
4 数据融合避障
4.1 模糊逻辑
基于人类的思考习惯实现的模糊逻辑控制免去了复杂的数学模型建立过程,通过专家知识转变为控制指令信号的则被简化,适用于复杂环境的地图环境。模糊规则呈现了机器人的行走动作与其外部传感器(声呐、激光雷达等)的反馈数据之间的映射关系。通过动作的结果,可以测算当前模糊规则的适应度;通过优胜劣汰的方式,逐渐筛选出最优规则。
激光传感器具有精度高、检测距离较长、检测范围广的优势,但由于激光并不能覆盖移动机器人车身360°,通常会在机器人后方留下大约100°左右的“死角”,限于高精度激光的高昂成本,通过激光传感器来全方位覆盖车身难以实施。声呐通过超声测距,可以检测传感器端面前方约50 cm的锥形空间是否有障碍物遮挡,且其成本低廉,可以大量装载。将8个声呐均匀安装与车体的周围,根据声呐的分布可将车体周围空间细分为8份。通过声呐的反馈数据可以获取车体周围障碍物所处的区域以及距离信息,结合移动机器人运动目标,可规划移动机器人底盘双轮输出速度。
模糊控制器的信息主要由3部分组成:模糊IO变量、模糊规则与模糊推理原则。
定义模糊输入输出量如表1所示。

表1 模糊量定义Tab.1 Fuzzy quantity definition

式中:第n条模糊规则用Rn表示;第i个区域及对应的模糊量用Li、li分别表示;i为目标点方向及应区域;ωL为左侧的轮速;ωR为右侧的轮速。
采用MIN-MAX合成法,设当前实际的各个区域障碍距离为有从0~n-1共n条规则被激活,则当前左轮的输出速度为

同理可得右轮的输出速度为

模糊规则的匹配需要考虑其目标方向是否相同,μ表示隶属度,ω1,ω2,…,ω8表示与当前规则的适配度,即规则被激活的程度,采用重心法,可得对应的左右轮输出为
4.2 最优规则
在NCS的每个控制周期内,需通过模糊逻辑推算相应的轮速输出量为

式中:Dms、Dme分别为每周期运动开始与结束时机器人与运动目标间的距离为物体运动起始与结束两个时间节点相对于障碍物的距离;i为传感器区域分割编号;ki为权重系数。
此时,可使用机器人预设的避碰半径来代替公式中消失项。经过仿真实验验证发现在同一环境状态下,输出轮速大的规则更易被筛选到,通过不断地迭代,可得最大速度的可行解,更易于减少导航控制的时间。
5 算法仿真验证
5.1 导航算法验证
通过ROS仿真平台,编写定位匹配算法与避障算法的节点,通过处理虚拟传感器反馈数据可得到如图1所示的仿真效果图。

图1 地图匹配和定位成功Fig.1 Map matching and location successful
图1 展示了机器人通过激光雷达扫描获取环境信息到成功建立地图的过程,从模糊到清晰的过程就是地图中特征逐渐完成匹配实现定位过程。由图1可见,通过特征提取的方式可以实现机器人位置与地图的匹配,进而实现定位功能,此过程中处理地图数据的匹配需要有一段较长的耗时。地图定位精度以及激光密度共同决定了匹配的数据维度,进而影响匹配的精度。若采用精度较低的激光雷达,则可以在牺牲定位精度的前提下,缩短定位时间。
5.2 避障算法导航算法验证
物流机器人在实际工作当中障碍物的分布有疏密之分,为验证所设计算法对于障碍物分布的空间尺度具有较强的适应性,分别选取了宽阔场景中大面积障碍物以及狭窄场景中的通路边缘两种典型环境进行仿真,路径通过ROS的物理引擎进行呈现。在宽阔及狭窄的环境避障算法的效果分别如图2所示。
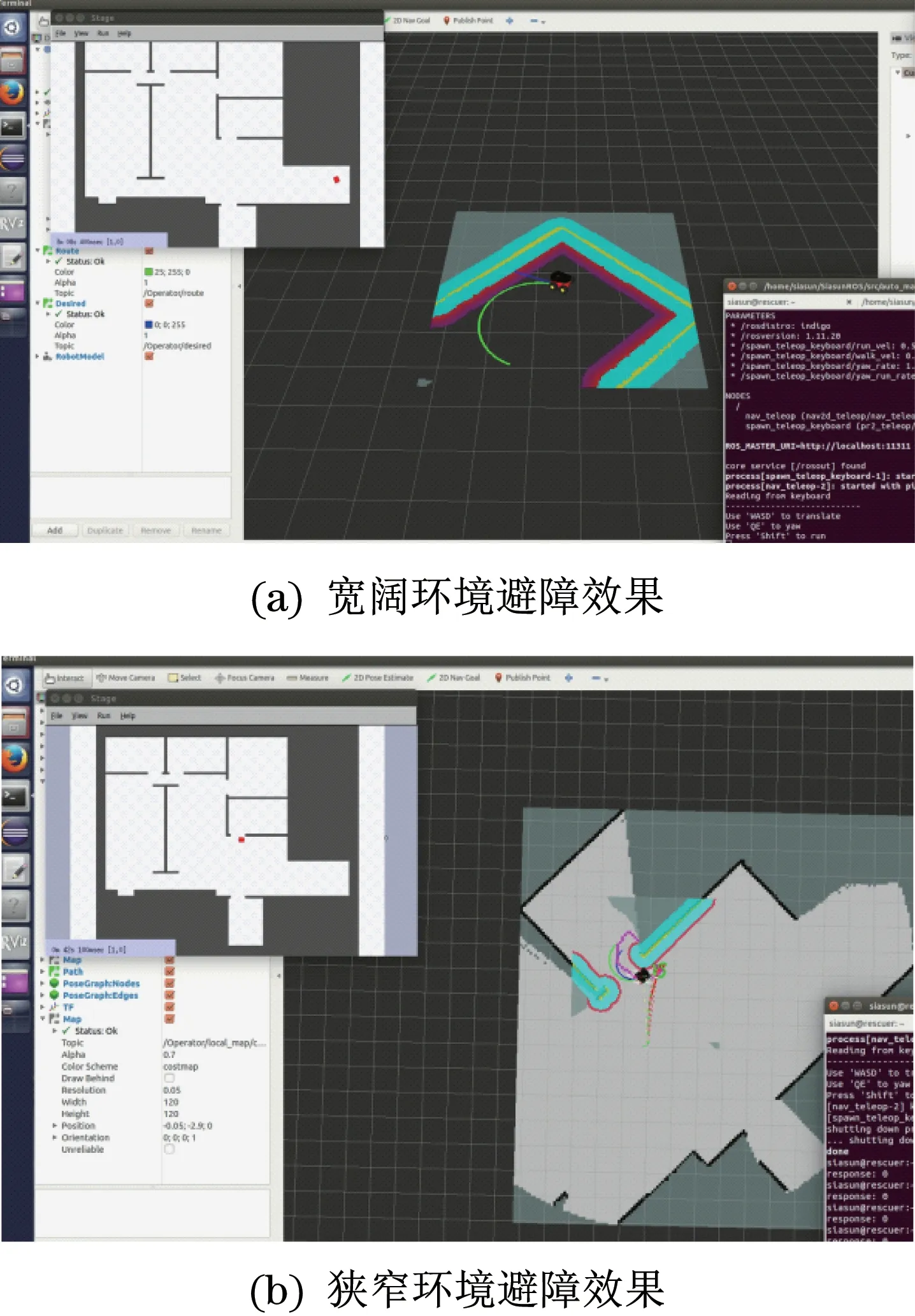
图2 宽阔和狭窄环境避障效果Fig.2 Wide and narrow environment obstacle avoidance effect
通过图2(a)可发现,运用避障算法,在宽阔环境中通过激光数据可检测到较远距离的障碍物分布,同时,根据声呐数据选择运动偏移的方向,此时激光数据起主导作用,声呐数据只是提供辅助信息,便于为机器人快速定位运动方向;而在如图2(b)所示的狭窄环境中,激光雷达所扫描到的区域几乎被障碍物所包围,此时仅通过激光数据已经无法寻找到合适的行走规则,通过多个区域内声呐所检测到的障碍物信息,搜索适应度最佳的规则,确定机器人双轮速度的最优解。值得注意的是,声呐安装的数量越多,分布越密集,则在该方向对于障碍物检测效果越好,在实际工作中在处理时会牺牲较长的计算时间,在尽量保证最优的同时也会使得机器人运动迟缓。过多的声呐,会提升模糊逻辑数据的维度,感知的效果与导航算法的快速性之间是负相关的。因此,声呐的数量需要实际应用需求和系统的硬件水平来进行部署,合理地调节声呐的分布可在最优化行走路径与最短时间这对矛盾中取得较为合理的折中。
6 结语
在现代化农业仓库物流搬运产业布局中,通过移动机器人取代人来实现产业升级是一条必由之路。本文针对移动机器人导航控制问题进行了深入研究。首先对移动机器人控制平台进行了阐述,并分析了移动机器人的经典双轮差动模型;其次,通过激光雷达感知环境并进行特征提取的手段实现了机器人的定位与地图匹配;最后通过声呐与激光两种传感器信息融合的方法,基于模糊逻辑机器人自主避障的最优化避障算法融合了激光雷达与声呐的数据,使得对于狭窄环境下微距障碍物的感知增强,适用于激光避障无法奏效的情况,以引导机器人的避障行走至目标位置。算法实现所依赖的主要反馈数据来源为价格较为低廉的声呐传感器,使得本算法在工程上具有一定的实践价值。
猜你喜欢
北京测绘(2022年5期)2022-11-22
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
北京航空航天大学学报(2022年6期)2022-07-02
汽车观察(2021年8期)2021-09-01
海洋信息技术与应用(2020年3期)2020-08-24
小学科学(学生版)(2019年10期)2019-11-16
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
制造技术与机床(2017年3期)2017-06-23
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28