
平地机铲刀的动力学特性分析
2020-03-27 06:32刘聪于明赵坚洪学武刘海强王志斌宁凡
机械工程师 2020年3期
刘聪, 于明, 赵坚, 洪学武, 刘海强, 王志斌, 宁凡
(天津城建大学a.控制与机械工程学院;b.计算机与信息工程学院,天津300384)
0 引 言
平地机的功能越来越丰富,其主要作业装置是平地机铲刀,可以利用它来进行路面打平、侧破作业等,平地机同时也可以修复断裂路面、清除路面积雪及其他一些工程作业。平地机主要由动力部件、液压传动、驾驶舱、前车架、铲刀等部分组成,铲刀是主要工作装置[1-2]。在机械工程领域中,机械设备所产生的振动和工作时所能承受的最大强度和刚度是衡量设备质量优劣的重要参考因素,往往直接影响它的市场价值。如果激励源的振动频率与铲刀结构的固有频率相等或者接近,就会引起铲刀的共振,会影响铲刀的使用性能,严重时会直接导致铲刀失效。
在实际应用中,铲刀断裂的情况屡见不鲜,本文通过对铲刀的动力学分析,得到铲刀的固有频率,以及铲刀的薄弱环节,为平地机铲刀的优化设计提供参考。
1 有限元模态分析理论
平地机铲刀的模态分析,即求出铲刀的固有频率和振型,铲刀的刚度大,结构阻尼较小[3-4],因此可以忽略,得到如下无阻尼的振动系统方程:

式中:M为质量矩阵;K为刚度矩阵;q¨为加速度向量;q为位移列向量。
铲刀的振动可看成是简谐振动的叠加,假设式(1)解为

式中:ω为简谐振动频率;θ为任意常数。
将式(2)代入式(1)得

所得式(3)为线性代数的方程组,通过求解可得结构的固有频率和固有振型。
2 建立铲刀的有限元模型
本文采用传统的圆弧形铲刀作为研究对象,结合实际设计出一款平地机铲刀,利用SolidWorks软件对其进行有限元建模及分析,其圆角、倒角、螺纹连接等在建模过程中可忽略。按照上述基本尺寸建立铲刀三维模型,如图1所示。
将平地机铲刀的三维实体模型导入ANSYS中。 铲刀的材料为Q345低合金结构钢,几乎不可压缩,故选用体单元SOLID186单元来进行自由网格划分[5-6],结果如图2所示,得到有限元模型的单元数为25 762,节点数为12 881,材料参数如表1所示。
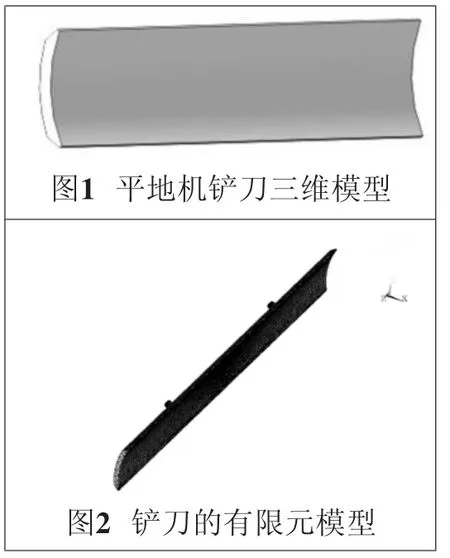

表1 铲刀材料参数
3 铲刀模态分析
3.1 铲刀的自由状态下的模态分析
对铲刀进行自由模态分析是为了解铲刀自身振动的固有的一些特性,与外界条件没有任何关系,可以了解铲刀的结构的动态性能(即铲刀在发生振动时,其各个部分的状况)。结合铲刀的实际工作状态,关心频率在30~1000 Hz范围内,在关心频率范围内取得有效的6阶模态分析结构,如图3所示。
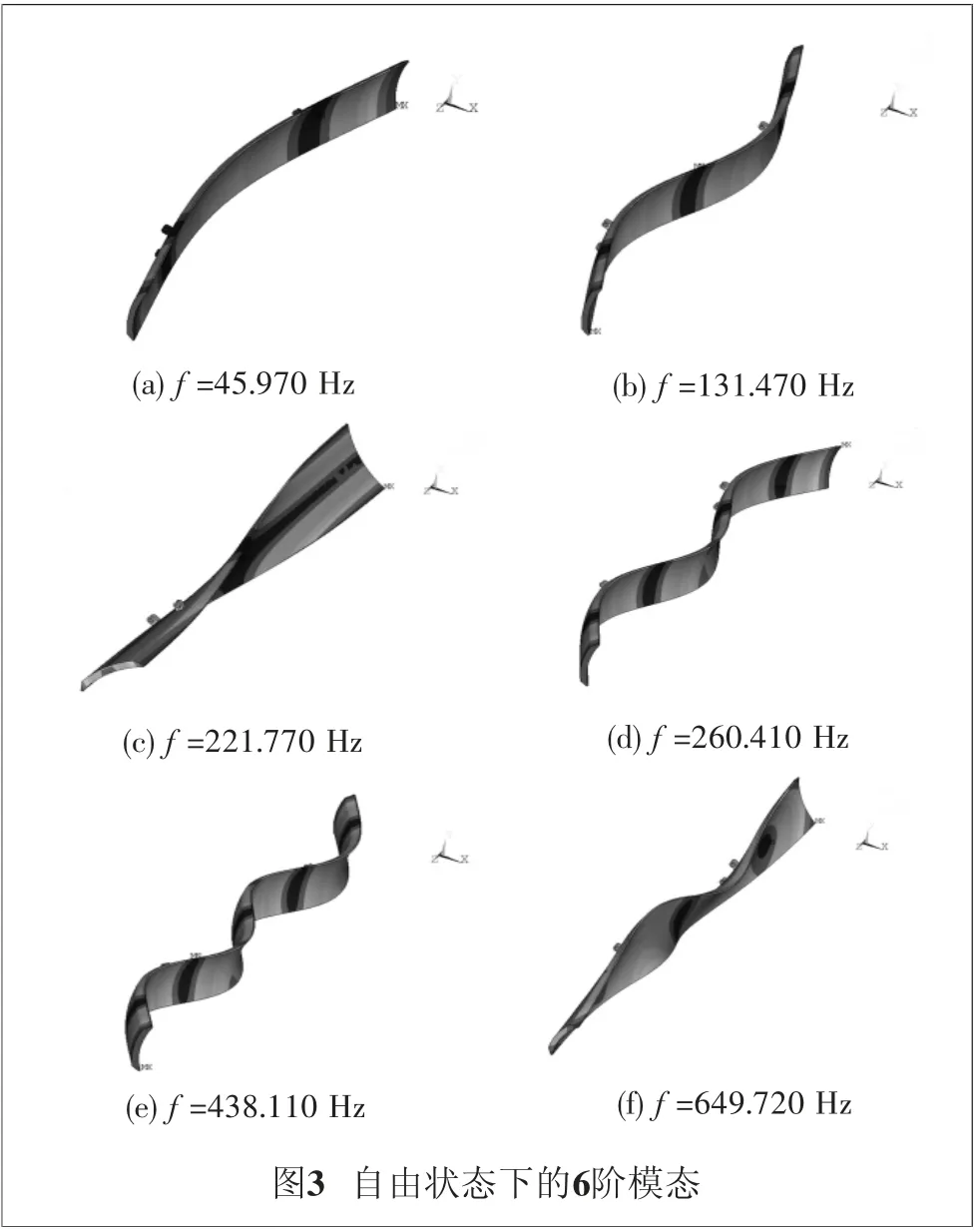
分析自由状态下的铲刀前6阶为刚体模态,故从第7个开始在关心频率的范围内取6阶模态,通过观察可清晰地了解到在自由状态下随着铲刀阶数的增加,频率的幅值逐渐增大,并且振动幅度也慢慢扩大。
正如图3所示,表达的是铲刀在自由状态下的6种不同频率下的振动模型,在第1阶和第2阶振动频率下,铲刀是绕着1条边线做弯曲的振动;在第3阶振动频率下,铲刀是绕Z轴做扭转振动;在第4阶振动频率下,铲刀是从中间底端开始以波纹的形式向着外层扩展,随之发生振动;在第5阶振动频率下,铲刀是从围绕着另1个斜对角位置做着往复振动;在第6阶振动频率下,铲刀也是从中间底端开始以波纹的形式向着外层扩展,随之发生振动。
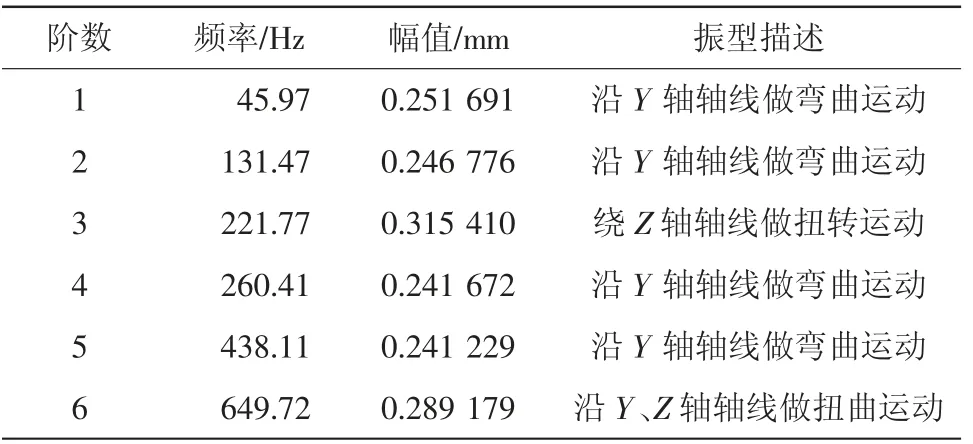
表2 铲刀自由状态下的模态分析结果
3.2 铲刀的有约束下的模态分析
将铲刀的三维模型导入ANSYS Workbench的DM分析系统中,划分单元网格[7-8]。然后在铲刀背面的支撑部件的两个表面添加同等大小的约束。为了较好地预测前车架的振动特性,在关心频率范围内取得有效的6阶模态,求解得到平地机铲刀在约束模态下6阶模态的分析结果,如图4所示。
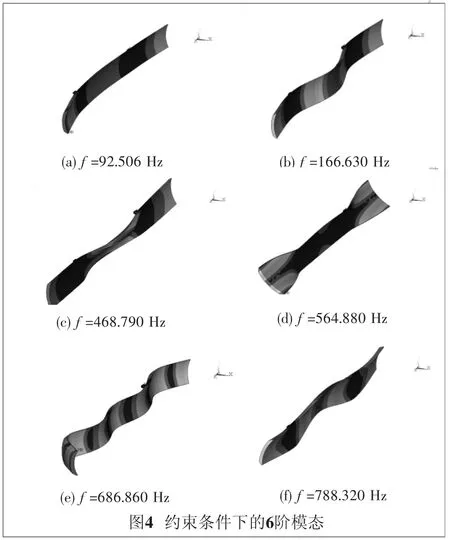

表3 铲刀约束情况下模态分析结果
通过观察图4可知,在约束条件下,随着铲刀阶数的增加,频率的幅值逐渐增大,振幅也有着相应的变化。根据上述模态振型图,表明有约束状态下的铲刀的前6种不同频率下的振动模型,其各自的最大变形量已在图中标示出来。在第1阶和第2阶振动频率下,铲刀是绕着Y轴轴向做弯曲振动;在第3阶振动频率下,铲刀是绕中间部分绕Z轴做扭转振动;在第4阶振动频率下,铲刀是从中间开始沿着Z轴向两边振动;在第5阶振动频率下,铲刀是从约束位置开始沿着Z轴做振动,并且是由小到大;在第6阶振动频率下,铲刀也是从中间开始沿着长度方向逐渐发生振动,但有差别的是,6阶下的振动波形不再是直线状而是波浪形。
4 结 论
根据以上结果可得出如下结论:1) 铲刀的模态分析显示,约束模态分析得出的结果,前6阶的振动频率范围分布在92~788 Hz,而且此后的频率越来越大,远大于发动机的振动频率,因此不会产生共振破坏;2)约束模态分析时,由1阶和6阶模态图可知,平地机铲刀的中间位置的变形位移量最大,故为铲刀的薄弱环节,结果显示,平地机铲刀受到载荷最容易发生损坏的部位是中间部位。
所以在进行较大负载作业的情况下,可以在中间加一个支撑件,用来抵抗铲刀发生位移的负载,或者采用性能更加优异的钢材,其强度和刚度等一些属性将会更好,承载的上限也就更加突出。
猜你喜欢
重庆交通大学学报(自然科学版)(2022年3期)2022-04-21
化工机械(2022年1期)2022-03-21
筑路机械与施工机械化(2018年11期)2018-11-29
山海经(2016年5期)2016-03-07
振动与冲击(2014年21期)2014-09-18
中国神经再生研究(英文版)(2014年23期)2014-06-01
客车技术与研究(2014年3期)2014-03-20
筑路机械与施工机械化(2014年7期)2014-03-01
筑路机械与施工机械化(2014年5期)2014-03-01
筑路机械与施工机械化(2014年3期)2014-03-01
