基于云模型的植保无人机飞行安全风险评估*
2021-03-10 05:13:02张海军李悦言张绍磊
智慧农业导刊 2021年6期
张海军,闫 琼,李悦言,张绍磊
(1.郑州航空工业管理学院 发展规划处,河南 郑州 450051;2.郑州航空工业管理学院 管理工程学院,河南 郑州 450051)
无人机是无人驾驶飞行器的统称,与载人飞机相比,无人机体积小、造价低、更加灵活且应用的领域也比较广泛[1]。起初,无人机仅应用于军事领域,后续逐渐被广泛应用于航拍、农业、植保、测绘、电力巡检、影视拍摄等民用领域[2-4],这大大地拓展了无人机本身的用途。虽然无人机市场发展迅猛,但由于无人机具有易发生失控、应变能力较低、易受天气影响等特点,加之我国在无人机的飞行运行、适航管理、安全管理等方面还未建立完善的法律法规,导致了大量违规飞行现象,无人机飞行事故时有发生。因此,开展无人机飞行风险研究对提高无人机飞行安全水平具有十分重要的意义。
目前,已有学者对无人机的飞行安全风险开展了研究,为无人机运行风险的研究奠定了一定的基础。杨林超对无人机运行风险的评价方法进行了概括总结,并分析了各个评价方法的优缺点,但未进行实例研究[5]。魏法杰等将层次分析法和专家评分法相结合,对无人机运行的安全水平进行评价,但该方法需要建立多个判断矩阵,并且需要对每一个判断矩阵进行一致性检验,计算过程过于繁琐[6]。闫少琨利用概率评价法对无人机空中碰撞的运行风险进行评估,并提出具体的优化方案,但所使用的气体模型仅针对于无人机的碰撞风险评估,未考虑无人机的撞地风险及其相关的因素[7]。高宇等通过计算最低安全评价指数,运用灰色关联度与层次分析法对无人机运行进行了风险评价[8];聂相田将序关系分析法与灰色模糊理论进行结合,建立了无人机飞行安全灰色模糊评价模型,并且验证了模型的合理性[9];贺强基于模糊认知图构建了无人机飞行安全风险评估模型,并进行了实例验证[10];但上述几位学者所研究的评价结果均为量化的数值或文字描述,无法将风险评估结构进行可视化表达。
综上,现有文献在计算无人机的飞行安全风险评价指标权重时,多采用计算过程复杂的层次分析法,而评估结果也无法进行可视化表达,为了解决上述问题,文章出一种新型的无人机飞行安全风险评估方法,在已构建的飞行安全风险评价指标体系上,首先基于序关系分析法计算各评价指标的权重,其次建立了无人机飞行安全风险评估云模型,并进行了实例研究以验证模型的有效性。
1 无人机飞行安全风险评价指标体系的构建
无人机的飞行安全与操作者的操控状况、无人机的机身结构、控制系统、通信状况、飞行环境等因素均有关联[11],结合现有的研究文献分析无人机运行的实际情况,采用德尔菲法对无人机的飞行安全风险进行了因素识别,并将影响无人机飞行安全的因素分为人员、设备、环境三个维度,构建了如图1所示的无人机飞行安全风险评价指标体系。
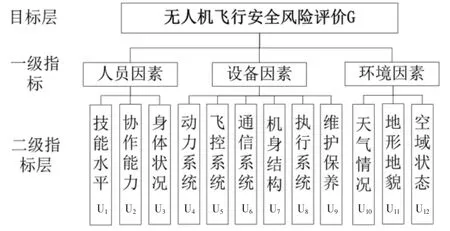
图1 无人机飞行安全风险评价指标体系
1.1 人员因素
无人机虽然不载人,但仍离不开操作者的操纵,其飞行安全与操作者的技能水平、协作能力、身体状况息息相关。例如,技能水平指操作者是否具有操纵无人机的能力、是否具备丰富的专业知识和飞行经验;协作能力则指操作者是否具备良好的沟通与团队合作的意识,是否能够遵循相应的规章制度;身体状况指操作者身体状况是否良好,能否正常操纵无人机。
1.2 设备因素
各个部件系统无故障是无人机正常运行的前提,故设备因素至关重要。设备因素包括动力系统、飞控系统、通信系统、机身结构、执行系统及维护保养六个二级指标。动力系统主要指无人机的马达、电池、螺旋桨等是否能够正常运转;飞控系统是指陀螺仪是否正常,无人机在飞行过程中能否稳定飞行姿态;通信系统是指无人机的信号发射模块与接收模块是否正常,与地面操纵器及空中其他无人机之间是否能够保持正常的通信;机身结构是指无人机的机身表面、空速管、侧翼等是否良好;执行系统则是指无人机的执行机构是否正常,不同类型的无人机其执行机构不尽相同,例如,对于航拍无人机来讲,其执行系统即为影像捕捉系统;维护保养则是指无人机是否定期进行了维护和保养。
1.3 环境因素
环境因素对于无人机的飞行安全至关重要,包括气象环境、地理环境、空域环境等三个二级指标。气象环境是指天气状况是否良好(无大风、雷雨、冰雹、大雾等),是否适宜无人机的安全飞行;地理环境指无人机的工作地理环境是否良好,例如,在山地丘陵地带,无人机的起降环境及飞行环境均较差,飞行安全风险较高;空域环境是无人机飞行的空域管理是否规范,空中交通管理机制是否完善。
2 人机飞行安全风险评估
2.1 人机飞行安全评价指标权重的计算
针对无人机飞行安全风险评价指标体系中上一层次某个因素而言,采用G1法计算本层次与之有关的各个因素的权重值时,计算步骤如下:
(1)确定本层次与上一层次某个因素相关的评价指标集合 A={a1,a2,…,at}。
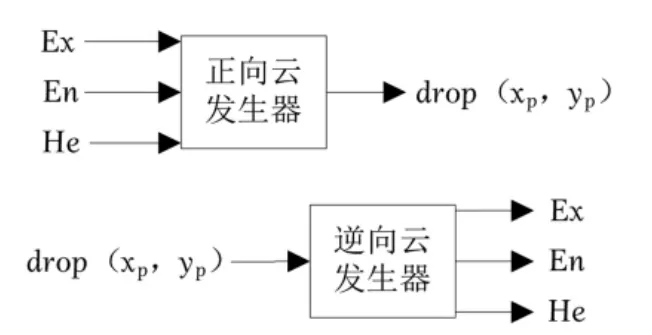
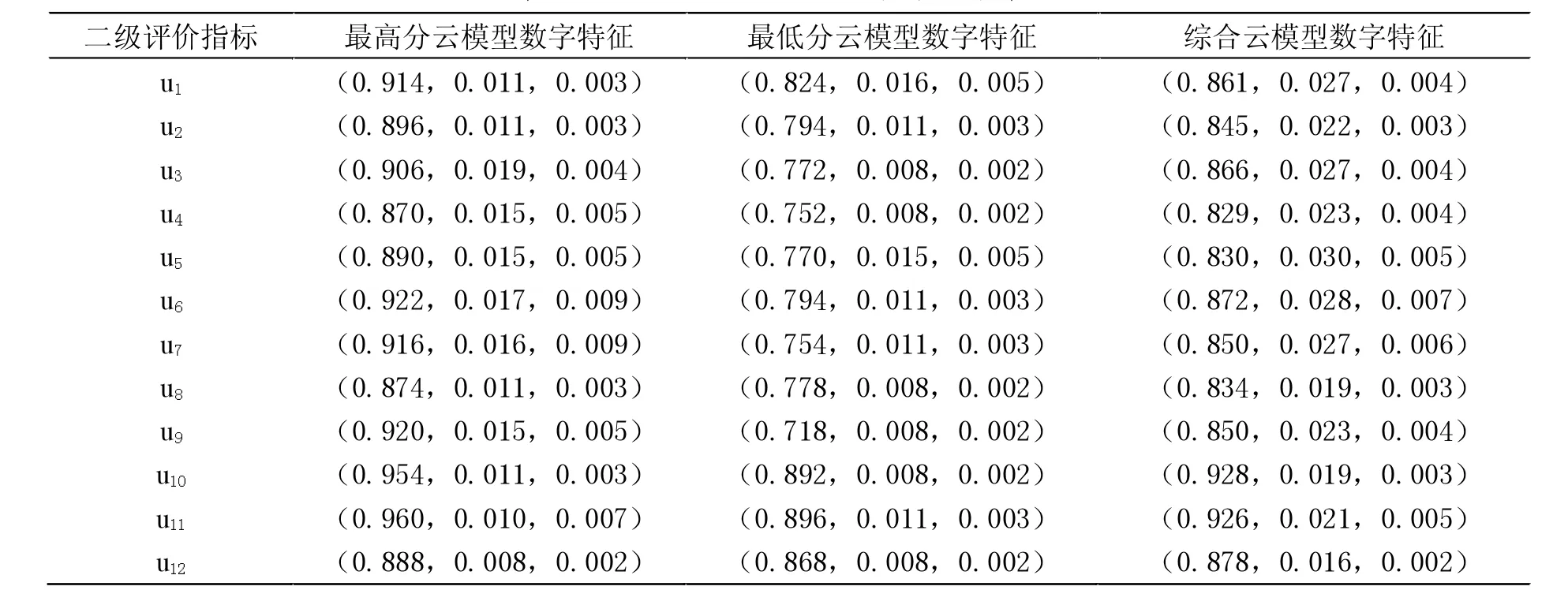
(2)对评价指标集合A中的元素进行比较排序,确定评价指标之间的序关系,得到新的有序的评价指标集合 B={b1,b2,…,bt},并且满足:若 i (3)依据表1确定相邻评价指标bk与bk-1之间的权重比 rk。 表1 rk赋值参考表 其中:w'k表示指标bk的权重。 (4)依据公式(2)、公式(3)计算各指标的权重值。 重复步骤(1)至步骤(4),分别计算出各二级指标相对于准则的权重以及准则相对于总目标的权重,将各二级指标权重与其相对应的准则权重相乘,即可得到二级指标相对于目标层的综合权重 w=(w1,w2…wn)T。 云模型是李德毅院士提出的,它不仅能够反映随机性和模糊性之间的相关性,而且能够反映自然语言表达的不确定性,从而形成定量和定性的互相映射[12]。云模型通过逆向云发生器及正向云发生器来进行计算,如图2所示。 图2 云模型发生器 建立无人机飞行安全风险评估云模型,可以将评估结果以直观的云图形式展现出来,主要包括以下几个步骤: (1)确定评语集及其对应的云数字特征,并绘制标准评价云图。 设无人机飞行安全评语集设评语集 V={v1,v2,v3,v4,v5}={低风险,较低风险,中风险,较高风险,高风险},其中低风险和高风险属于单边约束评语,其余均为双边约束评语。 采用黄金分割法对无人机风险评语集进行分区,对各评语的云模型数字特征进行云化处理,生成标准评价云图,见图3。 图3 准评价云图 (2)采用德尔菲法邀请m位专家对无人机飞行安全风险评估的各二级指标进行双边打分,打分区间为[0,1],0代表高风险,1代表无风险。为避免最终的评价云图出现雾状,决策专家可能会进行多轮打分。 (3)利用逆向云发生器,采用公式(4)及公式(5)分别计算各专家对二级指标评价最高分的云模型数字特征及最低分的云模型数字特征,并根据公式(6)计算各二级指标的综合云模型数字特征。 其中,xihmax代表第h位专家对第i个二级指标评价最高分;Eximax、Enimax、Heimax依次代表第 i个二级指标评价最高分的云期望、熵及超熵。 其中,xihmin代表第h位专家对第i个二级指标评价最低分;Eximin、Enimin、Heimin依次代表第 i个二级指标评价最低分的云期望、熵及超熵。 其中,Exi、Eni、Hei依次代表第 i个二级指标综合云模型的云期望、熵及超熵。 (4)依据各二级指标的综合云模型数字特征,结合二级指标相对于总目标的综合权重,采用公式(7)计算无人机飞行安全风险评估云模型的数字特征。 其中,n为二级指标的总个数,wi为第i个二级指标相对于总目标的综合权重。 (5)运用正向云发生器,通过MATLAB程序编程,将综合评价云模型数字特征转换成图形直观显示,最终得到实验室安全风险的评估结果。正向云发生器的求解过程为: 步骤一:生成以Entotal为期望值,Hetotal为标准差的一个正态随机数En'; 步骤二:生成以Entotal为期望值,En'的绝对值为标准差的一个正态随机数xp; 步骤三:依据公式(8)计算xp的隶属度,生成一个云滴 drop(xp,yp); 步骤四:重复步骤一至步骤三,直至产生N个云滴为止。 某植保无人机计划在一晴朗的天气对小麦农田开展植保作业,该无人机整机重量21.1kg,最大功耗8300W,配备有FPV摄像头、FPV探照灯、喷洒系统及高精度雷达等模块。该无人机实施作业的农田内及四周无高大障碍物,操作者具有三年的无人机飞行经验,在该机正式开展植保作业前,对其进行飞行安全风险评估,以确保能够安全开展植保作业。 首先计算准则相对于总目标的相对权重,依据评价指标体系,得到准则层的集合A={a1,a2,a3}={人员因素,设备因素,环境因素};对准则层进行定性排序后,得到新的集合 B={b1,b2,b3}={设备因素,人员因素,环境因素};根据表1,确定相邻指标之间的权重比得:r2=1.4,r3=1.2;根据公式(2)及公式(3)可依次求得: 同理,可求得各二级指标相对于各准则的相对权重,以及相对于总目标的综合权重,结果见表2。 表2 各一级指标及二级指标权重计算结果 (1)邀请5位专家对该植保无人机飞行安全风险评估各二级指标进行双边打分,打分区间为[0,1],结果如表3所示。 表3 专家打分结果 (2)采用公式(4)、(5)、(6)依次计算各二级指标的评价最高分云模型数字特征、最低分云模型数字特征及综合云模型数字特征,结果见表4。 表4 各二级指标云模型数字特征计算结果 (3)依据表4中各二级指标的云模型数字特征,采用公式(7)计算植保无人机飞行安全风险综合评估综合云模型的数字特征。可得,该植保无人机飞行风险评估的综合云模型数字特征为(0.866,0.024,0.004)。 (4)基于正向云发生器,通过MATLAB程序编程,设置云滴数N为1000,将综合云模型数字特征转化为云图,如图4所示,即该植保无人机进行植保作业的飞行风险评估结果为低风险,可正常开展植保作业。 图4 某植保无人机飞行风险评估结果 (1)基于序关系分析法及云模型对无人机的飞行安全风险进行评估,在计算权重时,无需构建判断矩阵,计算简便。 (2)实例计算说明了基于云模型对无人机飞行安全风险进行评估的有效性。所提出的评估模型也充分发挥了云模型在定性评价与定量表示转化方面的优势,不仅可以充分考虑专家进行决策提供信息的随机性和模糊性,而且能够将评价结果进行可视化,易于推广应用,为无人机的运行风险评价研究提供了一种新思路。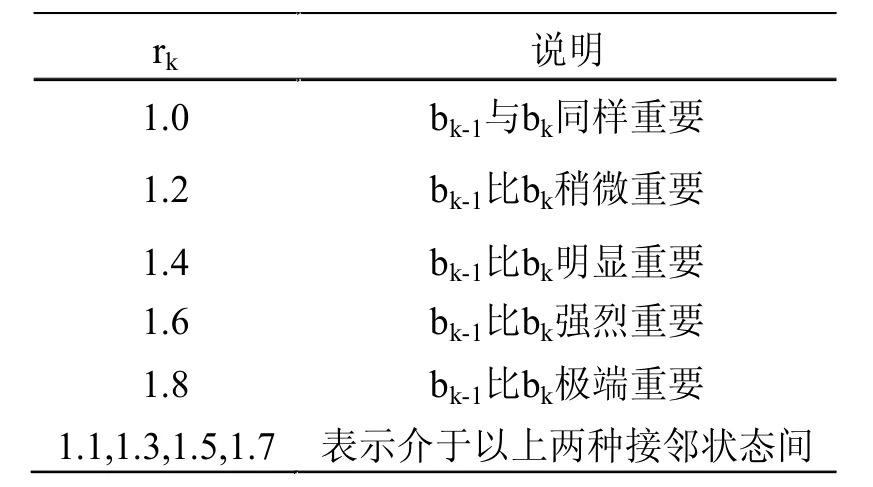


2.2 人机飞行安全风险评估云模型





3 实例计算
3.1 基于G1法计算评价指标体系权重

3.2 植保无人机飞行安全风险评价


4 结束语
猜你喜欢
广西植保(2021年4期)2022-01-06 07:55:00
今日农业(2021年17期)2021-11-26 23:38:44
当代陕西(2020年17期)2020-10-28 08:18:18
人大建设(2018年5期)2018-08-16 07:09:00
创新作文(5-6年级)(2018年11期)2018-04-23 12:46:50
新农业(2017年2期)2017-11-06 01:02:23
电信科学(2017年6期)2017-07-01 15:44:57
南风窗(2016年19期)2016-09-21 16:56:12
新农业(2016年22期)2016-08-16 03:34:45
小天使·六年级语数英综合(2014年3期)2014-03-15 00:26:19