基于改进阻抗控制的自适应曲面乳腺超声扫描方法
2021-02-24 04:51谢荣理赵艳娜
中国机械工程 2021年2期
沈 运 谢荣理 赵艳娜 付 庄 王 尧 张 俊 费 健
1. 上海交通大学机械系统与振动国家重点实验室,上海,200240
2. 上海交通大学医学院附属瑞金医院,上海,200025
3. 上海市瑞金康复医院,上海,200023
0 引言
据不完全统计,目前全球乳腺癌的发病率正在以每10年约30%的增长率不断攀升,死亡率占发病病例的15%左右且有进一步恶化的趋势[1],其现状不容乐观[2]。随着科学技术的发展与现代医疗水平的提高,早期乳腺癌的治愈率可达90%以上,因此,有效的乳腺癌筛查便成为辅助医生确定临床治疗方案的关键[1,3-5]。超声作为一种简单安全、价格低廉的乳腺癌筛查方法,已经被广泛地运用在临床实践中,是目前最为常用的一种检查手段[6]。
当前的人工超声检查方法存在一定的局限性:一方面,超声检查对操作人员的技术要求较高[7-8],缺乏专业技师使得小规模诊所无法应对高强度的超声检查,大型医院又显得负担过重[9-10];另一方面,人工超声检查难以制定统一的操作规范和扫描标准,不利于病例的总结和复习[11]。相较而言,机器人辅助超声扫描具有更高的位置精度和良好的重复性,且可以全天持续工作,足以应对任何高强度的扫描任务;此外,使用机器人还更容易制定规范来统一操作流程。综上,利用机器人辅助或在一定程度上取代操作人员进行超声检查便成为研究热点。
机器人辅助超声扫描的研究始于1999年,PIERROT等[12]将六自由度串联机械手运用到超声扫描中,达到了超声探头沿预定轨迹以恒力完成扫描的目的;BOCTOR等[13]在肝脏消融手术中,利用机械臂夹持超声探头并配合核磁共振(magnetic resonance,MR)或电子计算机断层扫描(computed tomography,CT)成像数据,对目标肿瘤做到了术中实时定位;SHINYA等[14]根据穿刺平面的实时定位信息,利用机械臂夹持超声探头来减少呼吸对图像偏移的影响;MUSTAFA等[15]利用超声图像修正探头偏转,使其能够尽可能贴合皮肤表面;GRAUMANN等[16]利用机械臂夹持超声探头沿深度相机采集并规划出的轨迹完成扫描。近年来,国内诸多研究机构或科研人员也开展了对机器人辅助超声扫描的研究。如WU等[17]利用Kinect相机采集组织表面结构数据并规划扫描路径,再通过三自由度平台夹持超声探头完成扫描;张娟等[18]同样利用Kinect相机作为视觉导航,从皮肤表面提取扫描路径后利用六自由度机械臂夹持超声探头完成扫描。此外,就医疗器械发展现状而言,针对机器人辅助乳腺扫描,自动乳腺全容积扫描(automated breast volume scanner ,ABVS)由于操作方便、成像清晰,已经逐渐运用到临床应用中。许多医院利用相关产品(如西门子公司的Acuson S2000),在临床实验中均取得了较好的效果[4-5,9,19]。可见,机器人辅助超声扫描受到了国内外研究者及器械供应商的广泛关注,人们开展了包括乳腺、膀胱、甲状腺等不同人体组织器官在内的机器人辅助扫描的研究及应用,以期最终能够达到解放超声检查人员、增强超声图像质量的目的。
目前机器人辅助乳腺扫描尚有诸多急需改进之处,为了提高超声图像的质量,其中最主要的就是超声探头和皮肤表面的贴合问题。以Acuson S2000为例,它完成乳腺三维成像的前提是将乳腺压扁成一个平面,这种对乳腺加压的方式会引起病人的不适,不适用于乳腺不能受压或者表皮有损的情况[5]。如果沿着皮肤曲面扫描,则需要提前规划扫描的路径才能使超声探头和皮肤曲面保持法向垂直。但是提前对乳腺进行外形轮廓建模,不仅增加了扫描前的工作量,特别是对医疗级别不高的诊所来说,经济性显然不足[10],而且相机不一定能拍摄到整个待扫描区域,对扫描区域的大小有一定的限制。另外,在扫描过程中为了保证图像质量和扫描安全性等问题,还需要通过一些方式将超声探头和皮肤表面的接触力反馈给控制系统,通过控制两者之间的相对位姿来保持一定程度上的恒力。这对扫描过程中的力反馈控制提出了要求。
在力反馈控制研究方面,阻抗控制占有相当重要的地位。自HOGAN[20]于1985年提出阻抗控制方法起,该控制方式就被研究人员广泛应用于力反馈控制当中。CAMARILLO等[21]在钻骨手术中使用阻抗控制方法来调节刀具速度,用以适应不同的骨密度情况;ROBODOC外科手术系统[22]同样利用阻抗控制方法在髋关节置换手术中提供自适应的刀具进给速度;王岚等[23]在手臂康复机器人中使用阻抗控制方法实现了机器人的柔顺运动控制;蔡国庆[24]利用阻抗控制方式降低了主从式穿刺设备从端的接触力波动,提高了穿刺的可靠性。鉴于此,寻找一种基于力反馈控制的自适应曲面乳腺超声扫描方法对于解决上述贴合问题将大有裨益。
本文首先分析扫描过程中超声探头和皮肤表面的相互作用,并根据其力学规律提出一种基于阻抗控制的控制算法来保证探头和皮肤表面之间的法向接触力基本恒定,进而使得扫描过程中超声探头和皮肤表面始终保持法向垂直;其次,根据控制器存在的不足,提出控制算法的改进方法,使其更能满足上述要求;再次,通过搭建实验平台完成乳腺体模和实际人体的测试实验;最后,验证所提控制算法在曲面自适应贴合问题上的表现性能。
1 曲面自适应贴合控制算法
1.1 超声探头与皮肤表面的相互作用
图1所示为超声探头与皮肤表面相互作用示意图。扫描过程中,超声探头与皮肤表面之间的作用力主要有:垂直于皮肤表面的法向接触力FN和平行于皮肤表面的运动阻力FR。以接触点T为原点建立笛卡儿坐标系,其中,x为超声探头的运动方向;y为超声探头的摆动方向;z为超声探头轴向,与皮肤表面保持法向垂直;超声探头在以速度u沿着皮肤表面扫描的过程中,探头除了受到自身重力G外,还受到法向接触力FN和运动阻力FR的作用。
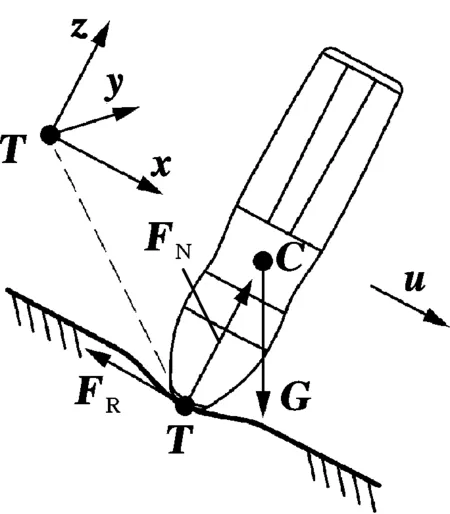
图1 超声探头与皮肤表面的相互作用
法向接触力FN来源于超声探头和皮肤表面之间的挤压,而运动阻力FR则主要由两部分阻力组成:①超声探头相对于皮肤表面运动引起的滑动摩擦力Ff;②超声探头在运动方向上挤压皮肤引起的压陷阻力Fp。如图2a所示,当FN较小时,超声探头挤压皮肤较浅,FR以滑动摩擦力Ff为主;当FN较大时,超声探头挤压皮肤较深,FR以压陷阻力Fp为主。
滑动摩擦力Ff和压陷阻力Fp均为FN的函数,前、后段曲线采用Sigmoid函数进行光滑性过渡,则超声探头所受运动阻力大小FR表示为
FR=Ff+Fp=Y(FN)=σ(FN)μfFN+[1-σ(FN)]μp(FN-FNc)
(1)
其中,FNc为Fp在水平轴上的截距,见图2b;σ(FN)是一个S型函数,当FN较小时其值趋近于1,反之趋近于0,可以表示为
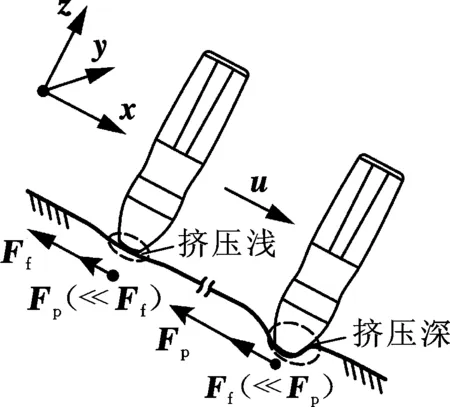
(a) 挤压皮肤深浅
(2)
其中,FN0为过渡区域横坐标中心,见图2b;α表示S型函数的陡峭程度,其值越大,函数曲线越陡。在滑动摩擦因数μf和压陷摩擦因数μp都确定的情况下,可通过最小二乘法得到FN0及α:
(3)
其中,p1~p4为中间变量,FNi、FRi分别为第i组法向接触力和运动阻力,n为数据对(FNi,FRi)的总个数,i为每个数据对的标号,凡纳入计算的数据对,必须满足FN位于过渡区域。
1.2 控制算法
为了保证超声探头和皮肤间的法向接触力恒定,需要设计控制算法使得FN保持在一个设定值FNr附近。当FN基本不变时,如果超声探头在扫描过程中偏离了与皮肤表面保持法向垂直的状态,那么它受到的运动阻力也一定会有所变化。
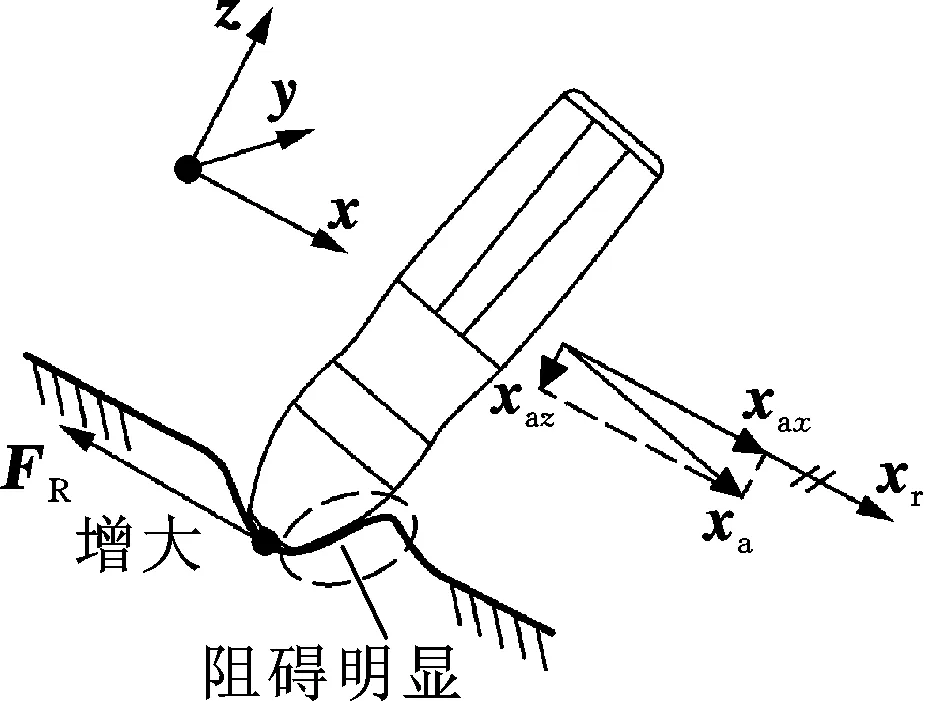
如图3所示,当超声探头姿态倾向于参考运动方向时,其实际运动方向有指向皮肤表面的分量,前进方向的阻碍将变得更为明显,受到的运动阻力会增大;反之,当超声探头姿态远离参考运动方向时,其实际运动方向有背离皮肤表面的分量,前进方向的阻碍将会减少,受到的运动阻力减小。其中,xr为参考运动方向,xa为实际运动方向,xax和xaz分别为xa在参考运动方向和参考皮肤法向方向上的分量。
(a) 探头姿态倾向参考运动方向,阻力增大
为了保证超声探头在扫描的过程中基本与皮肤表面保持法向垂直,需要设计控制算法使得FR保持在参考值FRr附近,而FRr可由实时采集得到的FN及式(1)~ 式(3)确定。
在控制超声探头进行扫描时,为了达到力的跟踪效果,本文采用阻抗控制的方法。如图4所示,被控变量分别为探头到皮肤的间距lz和探头在xz平面内的转角θy。根据阻抗控制方法设计的控制器具有如下一般形式:

(4)
其中,M、B、K分别为控制器的惯性、阻尼和刚度矩阵,ΔX及其各阶导数分别表示位置、速度和加速度误差,ΔF表示受控力误差。
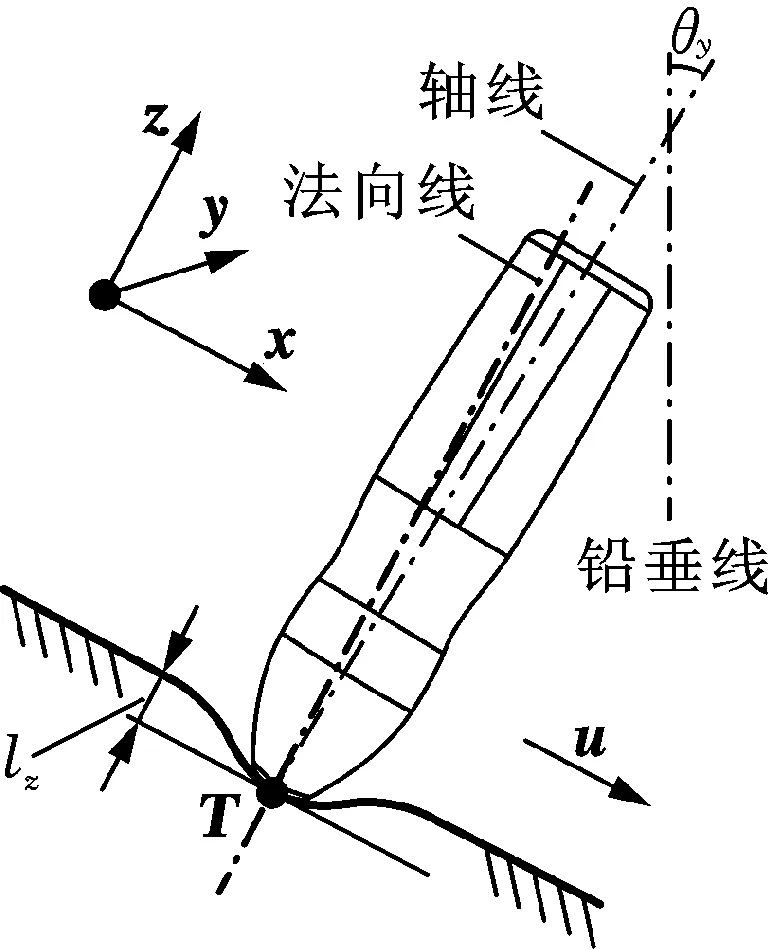
图4 被控变量几何含义
根据图1中超声探头的受力分析,式(4)中的变量为
(5)
由于机械臂仅反馈位置和速度信息,故控制器中的惯性矩阵将不予考虑。令参考速度为0,将式(1)代入式(5)可得
(6)
其中,lzr、θyr分别表示参考间距和转角;K1、K2为控制器需要设计的参数矩阵,分别表征力和速度对探头位置的影响。
实际应用中,通过尝试性实验,参数矩阵K1和K2为不同扫描速度下根据目标跟踪效果所确定的较优值。尝试性实验发现:机械臂反馈的速度并不准确,因此,实际扫描过程中仅采用位置反馈信号,则设置K2=0;K1的倒数就是式(5)的刚度矩阵,即K1=K-1。进一步,将由控制器得到的参考间距和转角转换成超声探头的位姿Pr输入机械臂控制系统即可得到整个闭环控制流程,如图5所示。在控制过程中,每个控制周期采用由式(6)计算得到的lzr和θyr作为下一个控制周期的目标值,并分别替换运动代码中的运动目标。
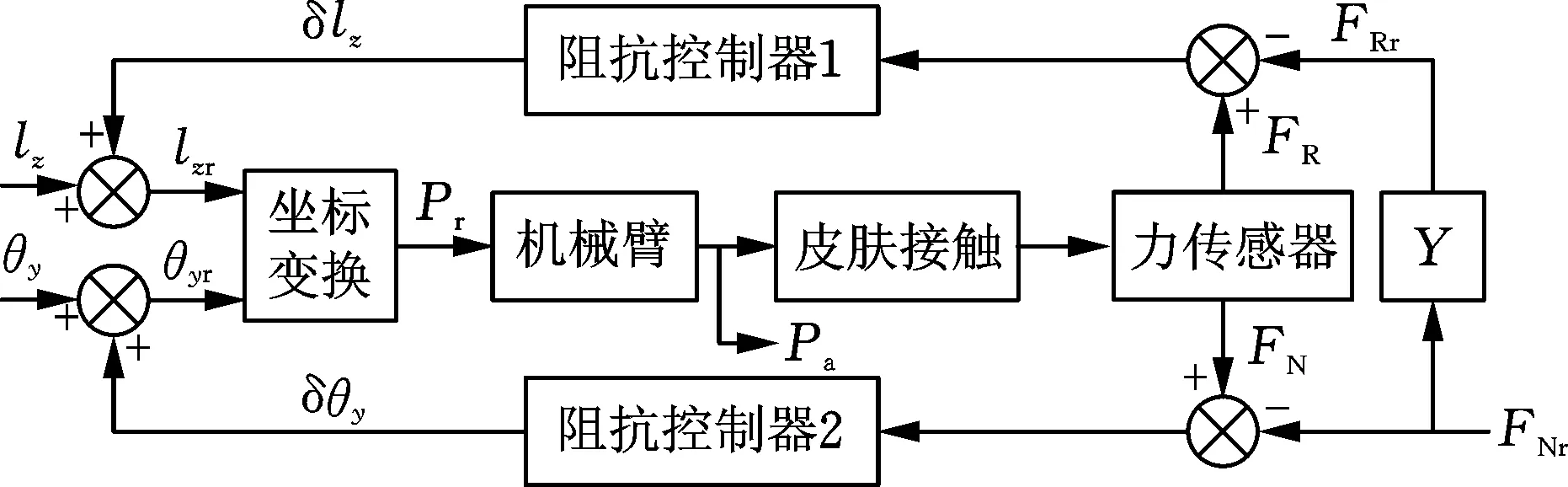
图5 基于阻抗控制的闭环控制算法
2 控制算法的改进
2.1 探头转角的估计方式
在对探头转角的控制中,使用式(1)来计算参考运动阻力值FRr,然而这样的方式(力控方法)不一定完全准确,原因是:一方面,式(1)只能通过实验来唯一确定,这使得不同的实验条件可能导致一些随机误差;另一方面,在扫描过程中也不能完全确定式(1)所对应的曲线是否会发生改变。因此,笔者拟寻求另一种可行方式对探头转角进行估计,来矫正仅通过式(1)作为一种估计方式所得到的结果,从而通过融合两种估计方式来弥补单一估计方式的不足。
在扫描过程中,通过前述的控制方式可以保持超声探头和皮肤间法向接触力基本不变(或达到允许误差范围内的振荡稳定),这说明超声探头的历史扫描轨迹可以在一定程度上反映出之前扫描过的曲面形状;而且人体的皮肤表面是连续的,所以可对探头的历史扫描轨迹进行拟合,来估计当前的探头转角参考值,如图6所示。
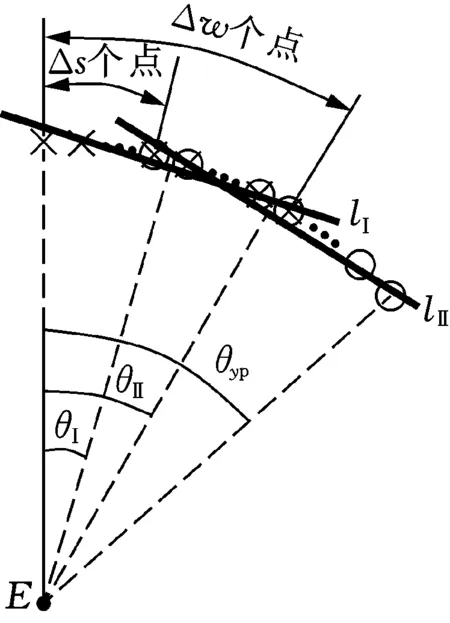
图6 从扫描轨迹估计转角参考值
历史轨迹曲线在所在有限范围内基本位于同一个圆上(以点E为圆心),则每次选取Δw个周期内的轨迹点进行直线拟合可以近似得到其中心点处的转角。图6中选取两段相差Δs个轨迹点的轨迹进行线性拟合得到lⅠ和lⅡ,分别对应转角θⅠ和θⅡ,则可以得到当前的转角估计值:
(7)
2.2 改进的转角控制
利用上述方式得到对转角参考值的估计后,再融合两个估计值,即可得到最终的转角参考值,从而对转角控制进行改进。
估计值的融合借鉴了卡尔曼滤波器的思想,若从力控方法得到的估计值为θyr,则其方差为Py;若从扫描轨迹得到的估计值为θyp,则其方差为Ry,那么可以得到融合后的转角参考值:
(8)
其中,K为卡尔曼增益,上标带撇的变量为融合结果,方差Py的初值可以根据式(1)所对应的曲线进行估计,方差Ry可以根据|θyp-θⅡ|进行估计。
实际应用中,式(6)确定的θyr和式(7)确定的θyp通过式(8)得到融合后的下一个周期转角控制目标θ′yr。其中,由两个历史轨迹坐标序列求得θyp,每个序列包含Δw个坐标,两者相差Δs个坐标,每个控制周期都用后续坐标更新当前两个序列。然后,每个控制周期采用由融合后的θ′yr和式(6)计算得到的lzr作为下一控制周期的目标值,并分别替换运动代码中的运动目标。
3 实验研究
采用乳腺体模和人体活体分别搭建实验平台,对上述控制算法的正确性与有效性进行实验验证。乳腺超声扫描的整体方式采用辐射型扫描方式,如图7所示。超声探头将逐一沿辐射状扫描轨迹线向远离乳头的方向进行扫描。其中,完成单条扫描线的过程称为一次扫描,完成一圈循环的扫描线的过程称为一轮扫描。
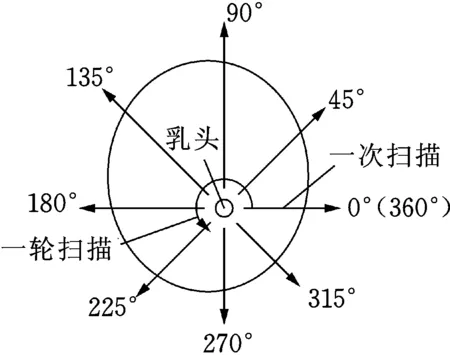
图7 辐射状乳腺扫描方式示意图
3.1 乳腺体模实验
首先搭建了乳腺体模的实验平台,主要用以验证模型和算法。如图8所示,实验平台包括机械臂1及其控制系统2、六维力传感器3、超声探头4和乳腺体模5。其中,机械臂末端的重复定位精度约0.1 mm,六维力传感器的最小分辨率约0.05 N,超声探头采用LA523型探头,乳腺体模采用3B Scientific公司的P124型模型。

图8 乳腺体模实验平台
3.2 人体活体实验
搭建了人体活体扫描的实验平台,除用于验证模型和算法外,还将用以验证自动扫描图像采集的完整性。如图9所示,实验平台中的硬件1~4与乳腺体模实验平台完全相同,此外还包括超声成像仪5、病床6及人体活体7。其中,超声成像仪采用Esaote公司的MyLab30型便携式成像仪,其扫描频率为12 MHz,扫描深度约为皮肤表面下方50 mm。
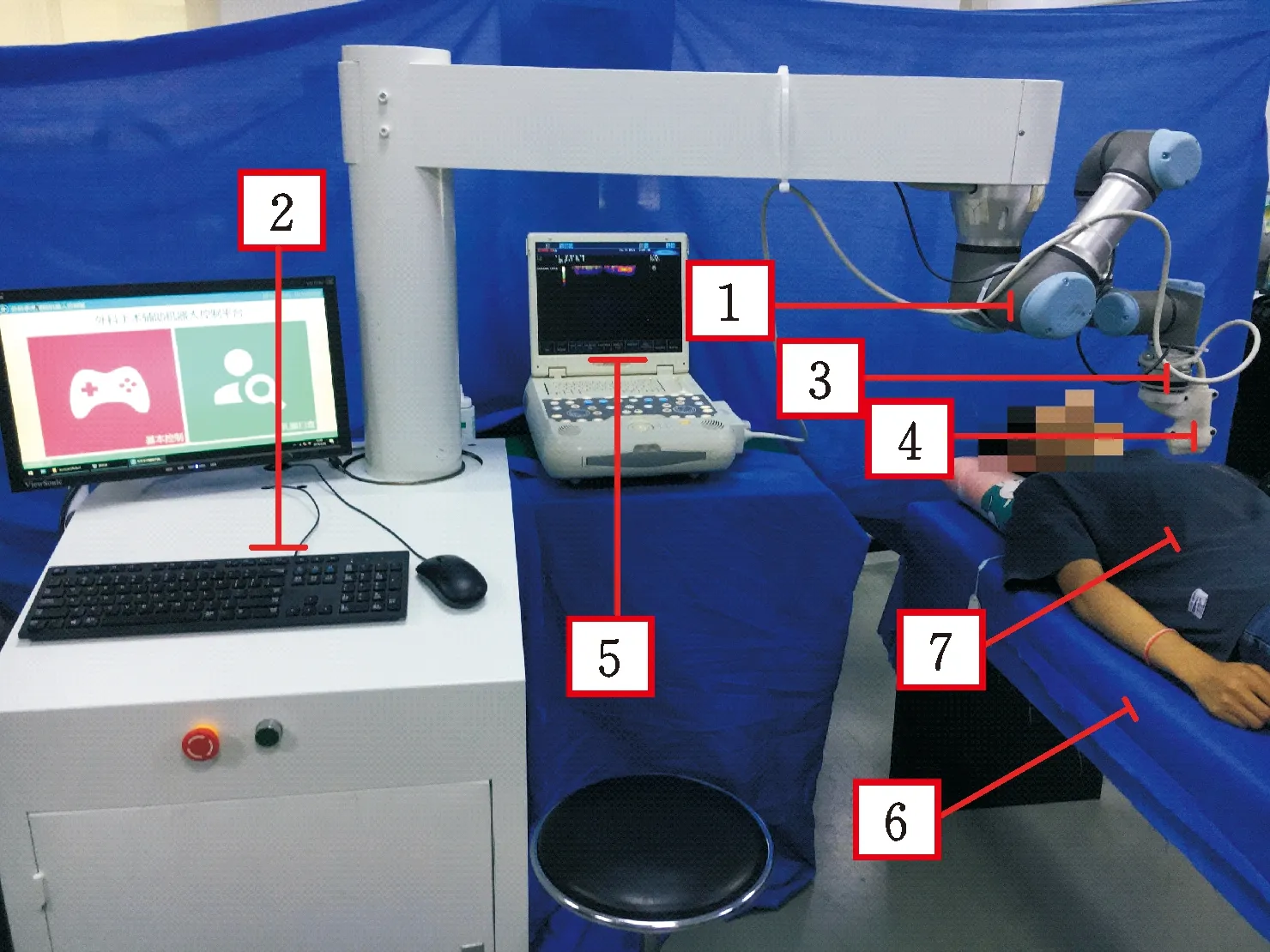
图9 人体实验平台
4 结果分析与讨论
4.1 运动阻力和法向接触力的关系
选择乳腺体模上的一块近似平面的皮肤,使得超声探头与其保持法向垂直,涂上超声耦合剂后控制超声探头在表面上运动。在不同的扫描速度 (分别取0.2,0.3,0.4,0.5,0.6,0.7,0.8,单位为mm/cycle,即每个控制周期移动的毫米距离) 下,保证超声探头和皮肤表面的法向接触力维持在一定的值附近(分别取0.5,1.0,2.0,3.0,4.0,5.0,6.0,单位为N)。每个扫描速度和法向接触力进行10次实验,记录所受的运动阻力均值,如图10所示。
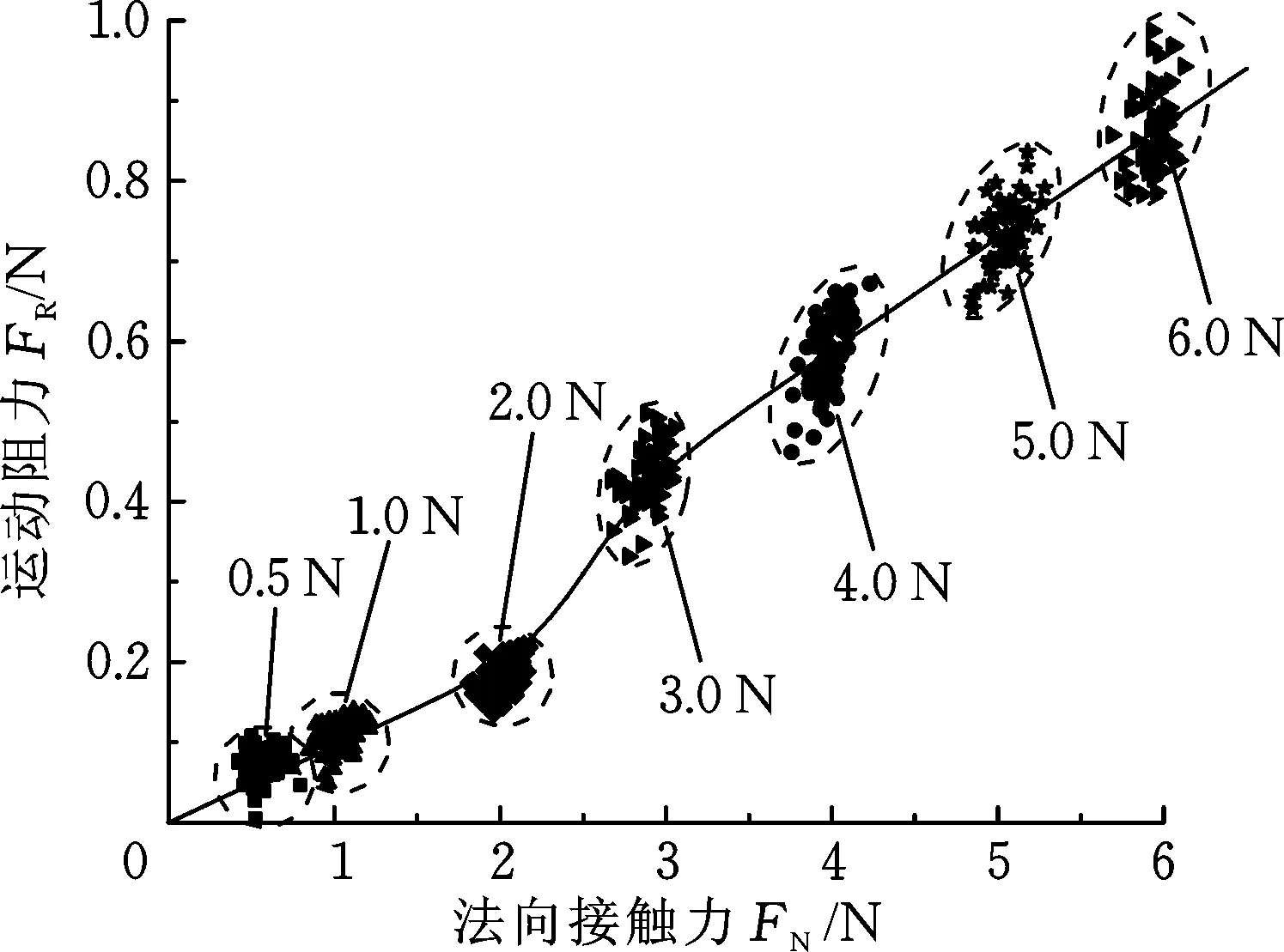
图10 运动阻力和法向接触力的关系
从实验数据中可以发现:即便是不同扫描速度下的数据点依然聚集在较小的范围内,因此,扫描速度对FR和FN之间关系的影响较小。对数据点进行线性拟合可得μf=0.095,μp=0.140,FNc=-0.192 N;再根据式(3)通过最小二乘法可得α=5.161,FN0=2.485 N;拟合得到的曲线如图10所示。拟合曲线的R2指标约为0.987,说明利用式(1)对运动阻力和法向接触力之间的关系进行拟合是可行的。
4.2 法向接触力的变化
通过不断调整参数可以得到一个表现较好的控制器参数K1=diag(Kl,Kθ),此时的控制参数与超声探头扫描速度的关系如图11所示。
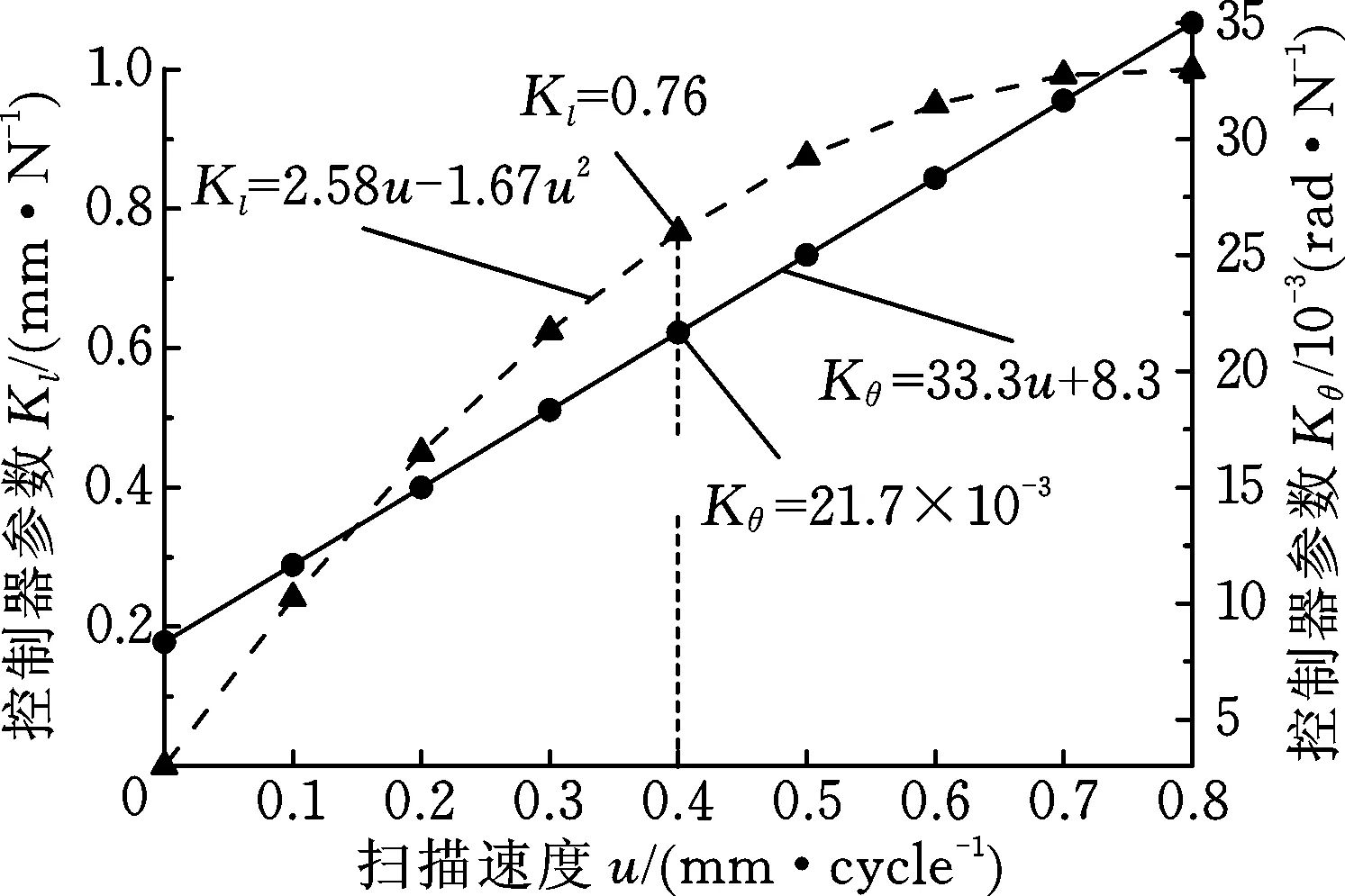
图11 控制器参数选择
随着扫描速度的上升,两个控制器参数都需要随之上升来达到跟踪的效果。其中,Kl的增速随着扫描速度u的上升而逐渐放缓,Kθ则与u呈线性的关系。选定一个u可以得到相应的控制参数,例如图11中选择u=0.4 mm/cycle可以得到对应的控制参数分别为Kl=0.76,Kθ=0.0217。
使用上述控制参数得到的法向接触力曲线如图12所示,其中分别给出了不同法向接触力水平下的跟踪效果,在开始跟踪前先将法向接触力调整至参考值附近。从图12中可以发现:实时采集的法向接触力基本维持在给定的参考值,平均振荡范围与参考值的偏差在±0.2 N以内,跟踪效果良好。
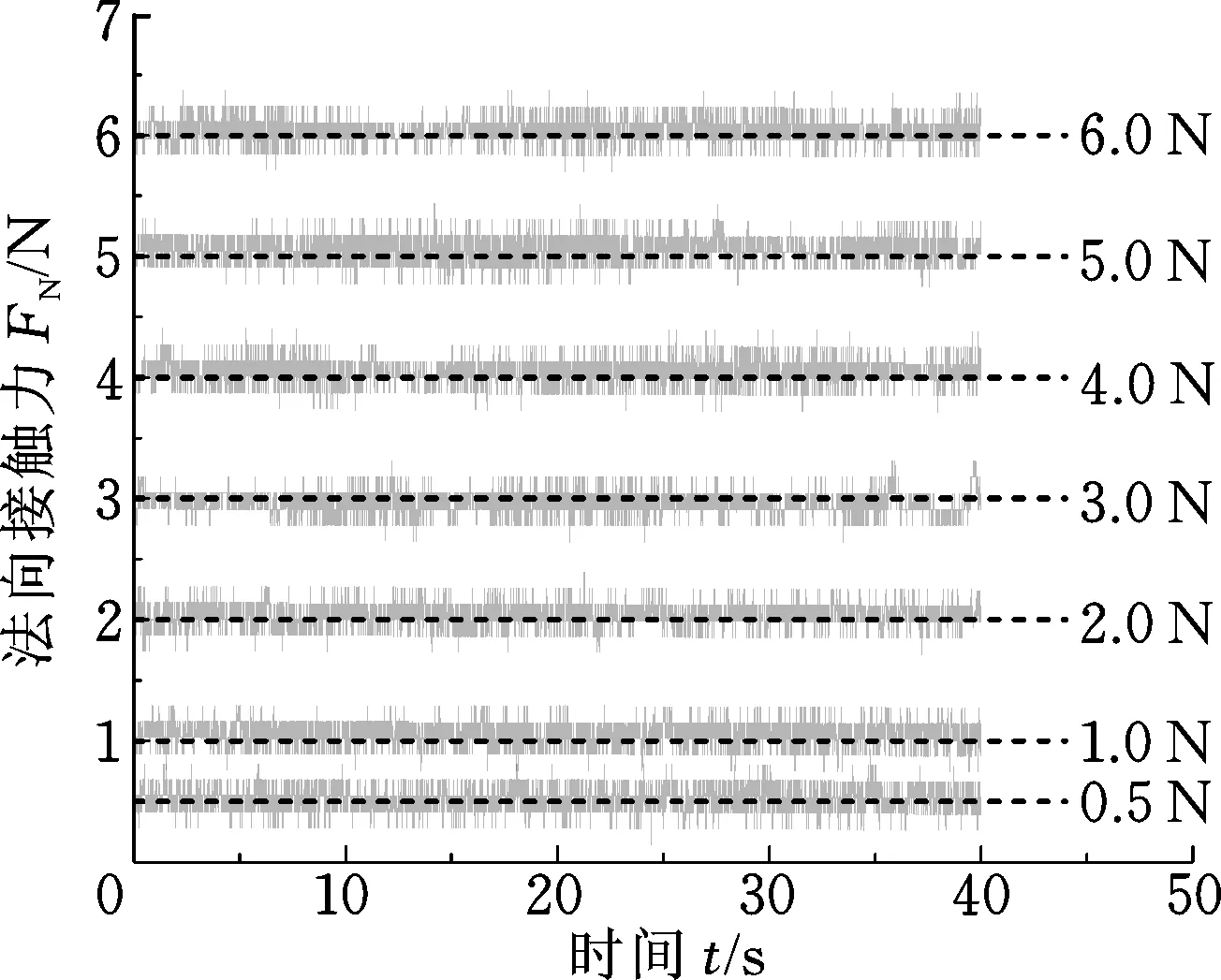
图12 法向弹力跟踪情况
其他不同扫描速度u下的法向弹力跟踪亦能达到上述效果。需要指出的是:针对实际临床应用场景,控制器的参数矩阵和皮肤表面的润滑状况都可能对恒力跟踪效果产生影响。本实验中始终使用同一种超声耦合剂来满足全润滑状态,从而间接保证皮肤表面的润滑状况基本不变;而控制器的参数矩阵仅与扫描速度有关,如图11所示。因此,当临床条件发生变化时,本文的控制方法可以通过调整控制参数来达到恒力跟踪的效果,即达到允许误差范围内的振荡稳定。
4.3 探头转角的变化
为了衡量探头转角的跟踪效果,利用低速扫描得到的历史轨迹近似拟合出整个扫描轮廓的外型,并将这样的拟合曲线作为标准转角曲线,如图13所示。其中,图13a为一次低速扫描(取扫描角度为270°)下的标准转角曲线拟合,采用二次参数曲线进行拟合,拟合曲线为
F(x,y)=(1.978x2+6.884xy-1.423y2)×10-31-(0.153x+0.361y-1.830)×10-28
(9)
图13b为一轮共计8次低速扫描下得到的标准转角曲线拟合,可以从中较为明显地看出乳腺的外型,水平面上的直线为辐射状扫描方式的轨迹。
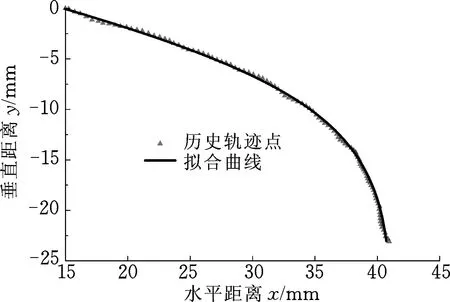
(a) 一次扫描
(a) 一次扫描
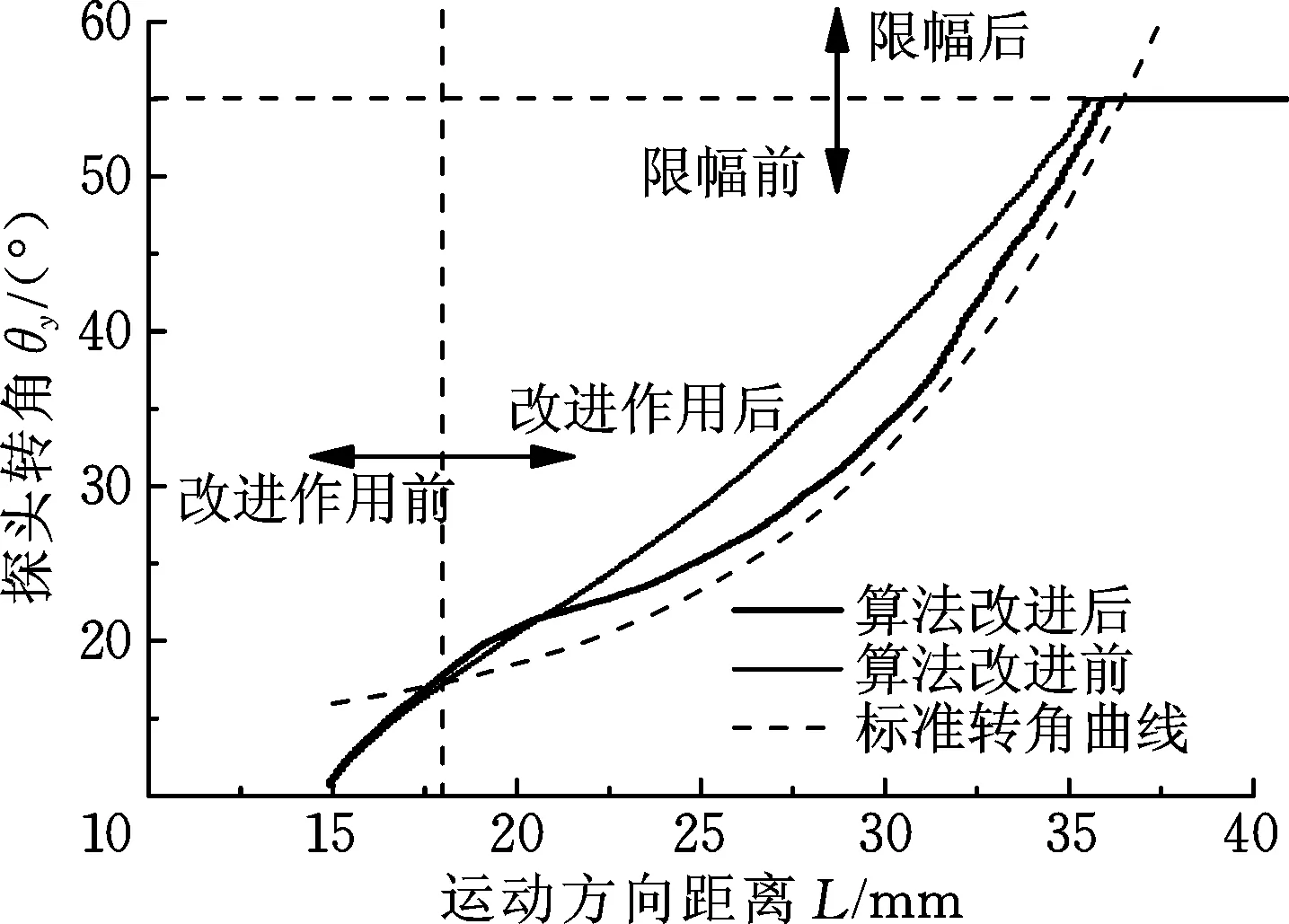
利用改进前后的算法分别进行实验并采集超声探头的实时转角同标准曲线对比,如图14所示。其中,图14a显示了一次扫描过程 (取扫描角度为270°) 中,算法改进前后的实时转角和标准转角的关系。由于历史轨迹点需要一定的累积,因此只有在扫描进行一段时间后改进算法才真正起作用,从图14a中可以看出,在改进作用后转角曲线才出现明显差别;另外,出于安全的考虑,会限制超声探头的最大转角不超过55°,即图14a中的转角不会超过该值。图14b所示为一轮共计8次扫描下,算法改进前后实时转角与标准转角的均方差。由图14b可以看出,当曲面较为平坦(扫描角度为90°处)时,算法改进前后的转角跟踪效果均较佳;而改进后的算法在不同曲率的曲面下,都使得转角跟踪效果进一步提高,但在曲面较为复杂(扫描角度为0°和225°处)时效果提高幅度不大。整体上来说,仅使用力控方法基本能满足标准转角的变化趋势,而改进后的算法在转角跟踪上有了更为显著的提高,使得平均转角跟踪误差从4.9°下降到2.2°。
4.4 乳腺体模扫描
对乳腺体模进行一轮扫描,包括共计8次独立扫描,其中扫描过程如图15所示。可以看到扫描过程中超声探头能够很好地紧贴乳腺体模,进一步说明了所提控制算法的有效性。
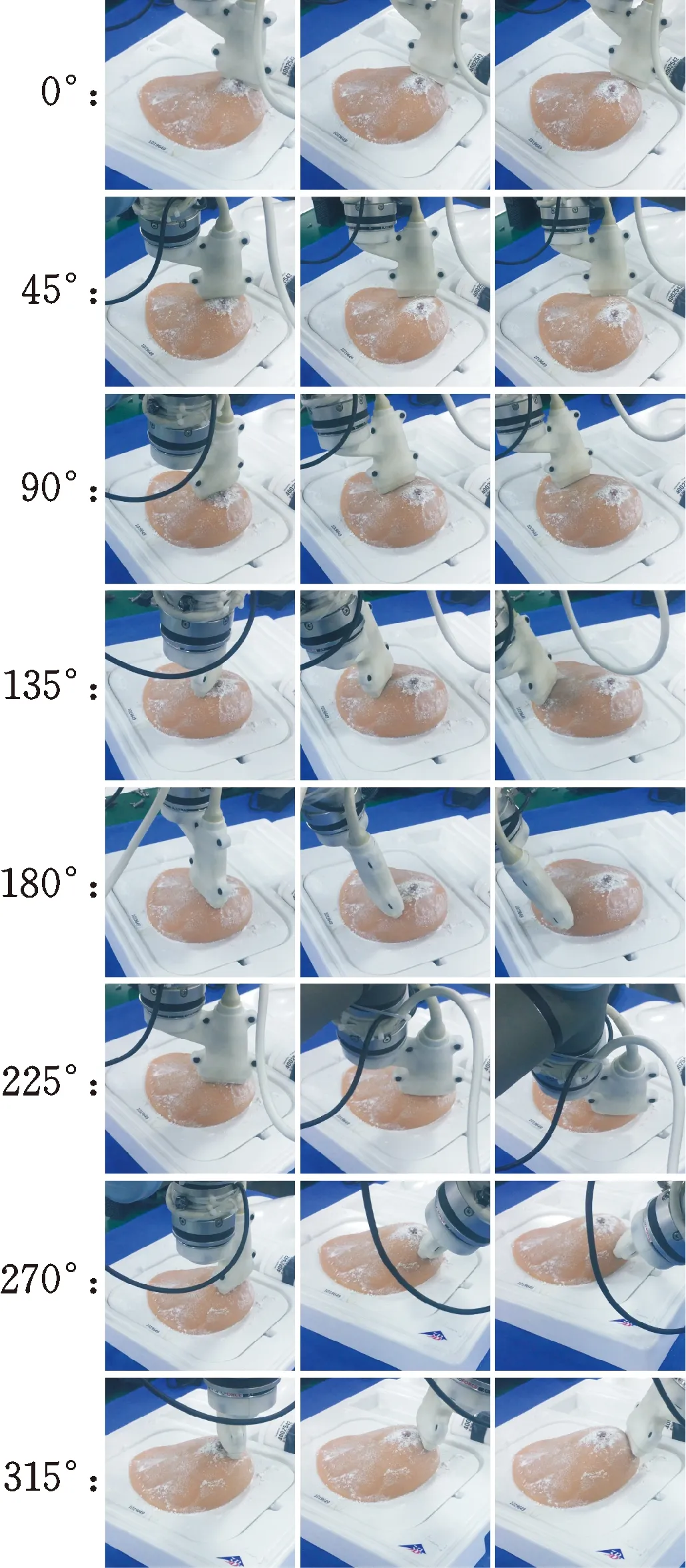
图15 乳腺体模的扫描情况
4.5 人体活体扫描
对人体进行一轮扫描,包括共计8次独立扫描,扫描过程如图16a所示,扫描过程的超声图像如图16b所示。超声图像采用了伪彩,使得观察扫描过程中组织的变化变得更加清晰。图16b中,随着超声探头的运动,扫描得到的组织变化也清晰可见,而且基本覆盖整个乳腺,证明使用本文算法时超声扫描的完整性。
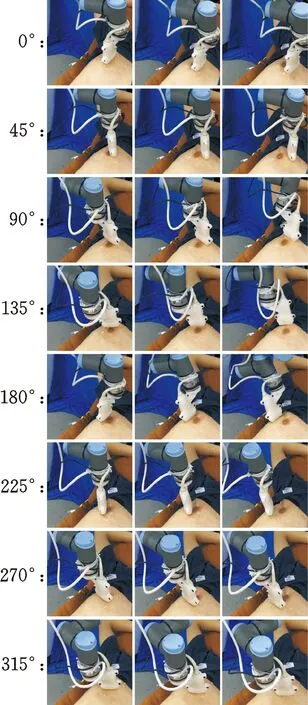
(a) 在人体活体上的一轮扫描
5 结论
本文以间距lz和转角θy为控制变量,建立了基于阻抗控制的扫描算法,同时,提出了转角估计的新方式以改进算法的转角跟踪性能,从而解决了机器人辅助超声扫描中皮肤曲面贴合的问题。根据乳腺体模扫描和人体活体扫描两类实验结果,可以得出以下结论:
(1)不同扫描速度u下的数据点聚集在较小的范围内,u对运动阻力FR和法向接触力FN之间关系的影响较小。
(2)所建立的阻抗控制方法可以通过调整控制参数来达到恒力跟踪的效果,即达到允许误差范围内的振荡稳定。
(3)所提出的转角估计新方式显著提高了算法在转角跟踪上的效果。
(4)人体活体扫描实验验证了控制算法的完整性,证明了该算法应用于临床的可行性。后续改进工作可考虑引入超声图像反馈做进一步优化。
猜你喜欢
水文地质工程地质(2022年2期)2022-04-13
电脑报(2021年25期)2021-08-27
辐射防护(2020年6期)2021-01-28
中国医学装备(2018年12期)2019-01-03
制造技术与机床(2017年6期)2018-01-19
光学精密工程(2016年1期)2016-11-07
癌症进展(2016年9期)2016-08-22
中国测试(2016年12期)2016-02-07
中国铁道科学(2015年4期)2015-06-21
电源技术(2015年9期)2015-06-05