
旋转机械电动振动台的PLC自动控制器设计
2021-02-24 10:13:14王晓飞
制造业自动化 2021年12期
王晓飞
(洛阳职业技术学院 信息技术与城建学院,洛阳 471000)
0 引言
PLC控制芯片是应用于工业领域的重要产品,其能够实现目标的位移控制、加减速控制等众多指标的控制。发电机、离心压缩机、汽轮机等机械设备是目前常用的旋转机械。目前,旋转机械已成为工程领域中必不可少的设备之一[1]。
伴随着工业行业自动化水平的不断提升,众多领域的研究学者对旋转机械展开深入研究。旋转机械利用增速减速用齿轮作为传动装置,旋转机械的设备间存在紧密联系。
旋转机械电动振动台是控制旋转机械稳定运行的重要设备,高效控制旋转机械电动振动台可保障旋转设备良好运行,对于保障建筑等领域的生产安全、提升设备安全水平来说具有重要作用。
旋转机械电动振动台是激振型设备,通过电动振动台获取机械产品零部件的构架强度以及运行状态的相关信息。旋转机械电动振动台具有较宽的工作频段,具有容易控制的优势。电动式是电动振动台的主要驱动方式,电动振动台利用线圈带动台面实现振动工作。
目前,针对PLC控制器的研究较多,如基于隔振加动力吸振方法的振动控制器[2]和基于变频控制器的高频摇振控制器[3]等。本文在传统研究的基础上,设计了一种新的旋转机械电动振动台的PLC自动控制器,实现对旋转机械电动振动台的高效控制。
1 PLC自动控制器设计
1.1 PLC自动控制器总体设计
充分考虑应用于工程中的旋转机械电动振动台控制需求,选取PLC控制芯片作为控制核心,设计适用于工程中的PLC自动控制器总体结构图如图1所示。
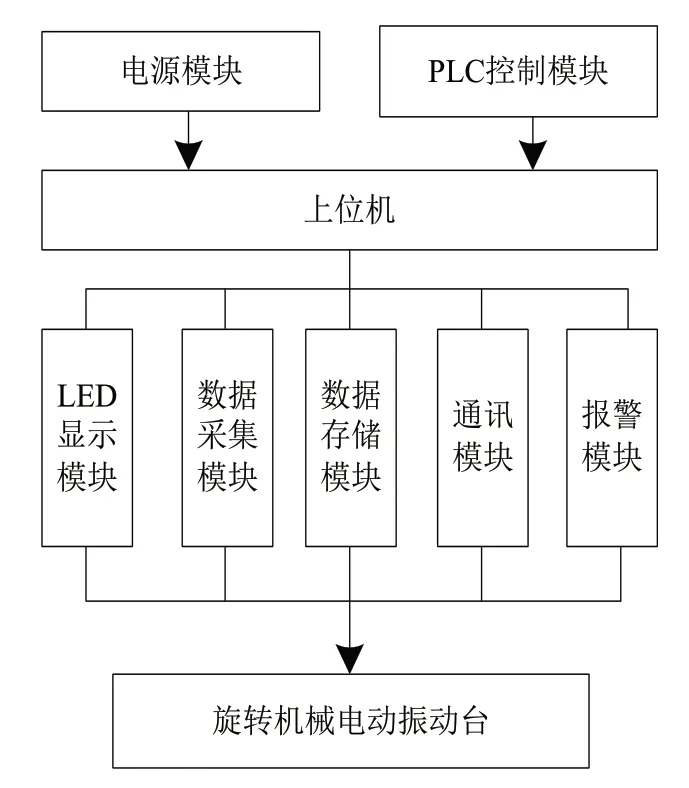
图1 PLC自动控制器
PLC自动控制器包括通讯模块、显示模块、上位机、报警模块、控制模块等模块。利用电源模块为控制器提供电能,电源模块中将电流滤波器串联至电源变压器中,提升控制器的抗干扰能力。控制器利用PLC控制模块实现应用于工程中的旋转机械电动振动台的精准控制。
PLC控制器利用上位机控制LED显示模块显示旋转机械电动振动台各项运行参数以及振动运行情况,通过加载单神经元PID控制算法实现电动振动台的控制。控制器利用数据采集模块以及数据存储模块采集以及保存数据,通过通讯模块实现控制器内信息的传输。此外,本研究在控制器中还设置了报警模块,用于提升控制过程的安全性。
1.2 硬件设计
1.2.1 PLC控制模块
将PLC控制芯片与计算机结合设计PLC控制器的控制模块。PLC自动控制器的控制模块结构图如图2所示。

图2 PLC控制模块
通过上位机实现电动振动台的控制。通过上位机输入控制器参数完成控制过程显示,利用上位机实现PLC控制程序的修改以及LED显示界面的控制。PLC自动控制器具有底层控制作用,可控制应用于工业工程中的旋转机械电动振动台变频器输出频率控制,通过振动方向的选择控制自动增益放大器。
选取台达DVP12SA211型号的PLC控制芯片作为PLC自动控制器的控制芯片。该控制芯片为晶体管输出,供电大小为24VDC,包括8个输入接口以及4个输出接口,主站与从站通讯接口分别为RS-232以及RS-485[4]。PLC控制芯片利用RS-485总线控制电流的频率变化。
1.2.2 报警模块
PLC自动控制器可能存在无法控制振动台的情况,采用报警模块对电动振动台管理人员发出警报,报警模块电路图如图3所示。

图3 报警模块电路图
图3中,PLC自动控制器设置的报警模块采用蜂鸣器结构一体化设置,蜂鸣器结构一体化是重要的发生器。蜂鸣器主要包括无源蜂鸣器以及有源蜂鸣器两部分,两种蜂鸣器分别利用方波驱动以及输入的低电平驱动,实现蜂鸣器应用于报警模块中的发生[5]。选取有源蜂鸣器应用于工程中旋转机械电动振动台的PLC自控控制器中,作为报警模块的警报输出。选取型号为8550的PNP三极管应用于报警模块中。PLC自动控制器复位过程中,其中包含的全部管脚均输出高电平,控制器输出高电平时,利用非门将高电平反向转换至低电平,PNP三极管经过转换后呈现饱和状态,处于导通状态,此时蜂鸣器可以发生警报声音。报警模块中的蜂鸣器的电压大小为+6V,PNP三极管由于饱和处于导通情况,电压转换为0.8V,将报警模块中限流电阻的电压设置为5.2V。
1.2.3 时钟电路
PLC自动控制器的时钟电路结构图如图4所示。

图4 时钟电路图
图4时钟电路图可以看出,时钟模块中包含两个外部晶振作为输入端和输出端的反相放大器,构成并联谐振回路。时钟模块中设置大小为32pF的微调电容,利用微调电容令电流接通上电过程中的晶振起振,设置13MHz作为晶振频率。
1.3 软件设计
1.3.1 PLC控制程序
选取模块化编程思想进行PLC自动控制器的软件编程。PLC控制程序编程流程图如图5所示。

图5 电动振动台PLC控制流程
图5中,PLC控制程序包含多个子程序模块,各子程序模块利用主程序组合与调用。
1.3.2 单神经元PID控制算法
本研究选取单神经元PID控制算法作为PLC自动控制器的控制策略。PLC自动控制器输出误差需为最小,通过单神经元修正PID控制算法的输出误差,提升PLC自动控制器对环境变化的适应性能。PLC自动控制器的输出误差表达式如下:

式(1)中,ym与y分别表示理想输出与实际输出。
采用单神经元修正控制器输出误差的输出表达式如下:

式(2)中,u(k)与u(k-1)分别表示k与k-1的输出信号,K表示控制参数,wi表示加权系数,xi表示单神经元学习PID控制算法的三个参量。
三个参量表达式分别如下:

式(3)~式(5)中,r(k)与y(k)分别表示控制器给定参数以及控制器的实际输出。
以上分析可知,单神经元控制方法与PID控制方法存在较高的相似性。结合单神经元控制方法与PID控制方法,建立PLC自动控制器控制的目标函数如下:

引入加权系数wi,令wi沿着所建立的PLC自动控制器目标函数搜索wi的负梯度方向,搜索结果表达式如下:

式(7)中,vi表示PID控制算法中的参数P、I、D的学习速度。
规范化处理以上公式,可得应用于PLC自动控制器中的单神经元PID控制算法表达式如下:

通过以上过程完成控制器的控制。
2 实例分析
为验证本文设计的有效性,将所设计的PID控制器应用于某施工中的建筑工程项目中的SR155-C10型旋转钻机电动振动台中。
SR155-C10型旋转钻机是应用于土木工程建筑工地中的重要设备,是建筑工地中打桩设备,钻孔直径为1500mm。该设备具有较高的灵活性,具有整机尺寸小的特点,且其运输便利、可靠性高。选取昆山海达精密仪器有限公司的HD-G826电动振动台作为测试PLC自动控制器控制性能的仪器。该电动振动台最大负载可高达1000kg,主动机功率为4kW~56kW,频率范围为5Hz~4000Hz。
通过自闭环实验验证所设计PLC自动控制器的控制性能。设置扫频测试的频率点为10Hz,所设计控制器滤波前后的时域波形对比结果如图6所示。

图6 滤波前后时域波形
分析图6实验结果可以看出,采用本文方法设计的PLC自动控制器可有效降低电动振动台的信号噪声,提升电动振动台运行过程中的信噪比。图6实验结果验证所设计PLC自动控制器具有较高的控制性能,可满足振动控制对滤波精度的需求,还可以有效改善振动信号的信噪比。这是因为本文方法对电动振动台信号进行滤波,可以获取更加准确的信号,提升控制器的控制精度。未滤波前获取的电动振动台时域信号未出现正弦特征,采用所设计的PLC自动控制器滤波后,电动振动台输出的时域信号具有典型的正弦特征。所设计PLC自动控制器具有较高的抗干扰能力,该控制器将电流滤波器串联至电源变压器中,避免高频噪声对输出信号干扰,提升了控制器的抗干扰水平。
统计本文方法设计的PLC自动控制器在扫频测试的不同频率点大小时,对电动振动台振动信号的改善情况。将本文方法与文献[2]方法以及文献[3]方法设计的控制器对比,对比结果如表1所示。

表1 降噪值对比
表1实验结果可以看出,采用本文方法设计的PLC自动控制器在滤波前后可将信噪比显著提升;而采用另两种方法设计的控制器在滤波前后对于输出结果信噪比提升幅度明显低于本文方法。对比结果证明了本文方法设计的PLC自动控制器具有较高的抑制噪声的能力,可以提升电动振动台振动幅值的控制精度。本文方法可以显著提升电动振动台运行过程中的信噪比,避免电动振动台运行过程中受到噪声影响,可满足振动控制的滤波性能。
设置线性扫频作为扫频模式,扫频时间间隔以及频率分别为2S以及1Hz/s,。采用本文方法设计的PID自动控制器控制电动振动台输出的加速度结果与标准加速度结果如图7所示。

图7 加速度控制结果
图7实验结果可以看出,采用本文方法设计的PLC自动控制器控制电动振动台输出的加速度结果与标准加速度结果相差较小,证明本文方法所设计的PLC自动控制器的控制效果较好。
统计本文方法设计的PLC自动控制器输出的加速度误差,将本文方法与文献[2]方法以及文献[3]方法对比,对比结果如图8所示。

图8 加速度误差对比
图8实验结果可以看出,相比于另两种方法,本文方法设计的PLC自动控制器具有性能稳定的特点,加速度误差低于3%;另两种方法设计的控制器控制电动振动台的加速度误差均高于4%,对比结果有效验证本文方法设计的PLC自动控制器具有极高的控制性能。本文方法设计的PLC自动控制器加速度误差远低于GB/T13310-2007规定的低于10%的要求。
统计本文方法所设计的PLC自动控制器在不同振动测试情况下的控制器平均启动时间,并将统计结果与另两种方法对比,对比结果如图9所示。

图9 控制器平均启动时间对比
分析图9所示的对比结果可以看出,本文方法设计的PLC自动控制器的平均启动时间低于1s;而另两种方法设计的PLC自动控制器启动时间均高于4s。对比结果验证本文方法可在短时间内快速实现自动控制器的启动,控制性能优越。本文方法设计的PLC自动控制器采用模块化编程思想实现PLC控制程序的编程,控制器运行过程中可以直接调用子程序,提升了所设计自动控制器的运行效率,令控制器启动时间大量缩短。
3 结语
本研究设计了一种建筑工程旋转机械电动振动台的PLC自动控制器,其具有较高的可靠性,能够满足电动振动台对于建筑用旋转机械应用的可靠性需求。所设计PLC自动控制器不仅可应用于建筑工程中的旋转机械中,对于其它领域的旋转机械同样具有较高的应用性能,具有较高的使用价值以及推广价值。
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29 13:58:36
哈尔滨工业大学学报(2022年5期)2022-04-19 13:26:22
小读者(2021年2期)2021-03-29 05:03:20
电脑报(2020年12期)2020-06-30 19:56:42
时代农机(2019年2期)2019-04-24 01:20:14
汽车观察(2018年10期)2018-11-06 07:05:28
车迷(2017年10期)2018-01-18 02:10:46
北京汽车(2017年3期)2017-10-14 02:15:52
汽车维护与修理(2016年10期)2016-07-10 08:17:41
振动工程学报(2015年1期)2015-03-01 01:15:44
