
一种并网逆变器电压电流双闭环改进控制策略
2021-02-23 02:46陈凤娇刘孙德
湖北工业大学学报 2021年1期
潘 健,陈凤娇,刘孙德,张 琦
(湖北工业大学太阳能高效利用及储能运行控制湖北省重点实验室,电气与电子工程学院,湖北 武汉 430068)
随着传统化石能源的枯竭,利用绿色能源的分布式发电技术逐渐成为了当下的研究热点,而微电网作为利用分布式电源(distributed generation,DG)的重要途径更是备受关注[1-3]。微电网是将分布式电源、储能设备、负载以及控制装置有效整合的微型电力系统,一般可工作在连接大电网的并网模式,也可断开大电网工作,实现自治的孤岛模式[4]。在交流微网中分布式电源一般通过电压源型逆变器实现并网,为使逆变器能工作在微电网的两种模式下,逆变器多采用模仿传统电力系统频率调节的下垂控制。采用下垂控制的DG并网逆变器可等效成一个受控电压源与一个输出阻抗串联形式[5]。但随着分布式电源在微网中的渗透率越来越高,微电网的系统惯量越来越小[6]。特别是孤岛模式下的微电网失去了大电网的支撑后,DG并网逆变器输出电压易受负载变动和不平衡负载的影响,导致DG输出电能质量下降,严重时迫使该DG退出微电网。
为解决该问题,国内外学者展开了深入研究。文献[5]首先通过消除dq坐标下DG并网逆变器电压电流双闭环与LC滤波环节之间的冗余项,从而简化控制环得到DG并网逆变器的戴维南等效模型,并利用多重比例谐振控制减小了由不平衡负载造成的电流高次谐波;但该方法不适用于多台DG并网逆变器并联的微电网。文献[7]通过分析发现:减小等效输出阻抗值能有效减轻负载投切对输出电压波形造成的影响,并在此基础上提出了电感电流前馈控制;该方法虽减轻了负载投切对输出电压的影响,但为减少传感器数量而将流经虚拟阻抗的电流改为电感电流,显然违背电路常理。文献[8]通过对比在电流环参考输入前分别加入电容电流前馈和电感电流前馈,发现在低频段添加电容电流前馈的输出阻抗值较小,且电容电流内环可反映负载变化,但电容电流前馈控制需要额外的信号处理装置。文献[9]同时采用参考电压前馈和负载电流前馈控制,并对采用负载电流前馈控制的电压、电流环的传递函数分别进行频率特性分析,发现在采用负载电流前馈控制后负载对系统闭环传函的影响减小,但该文未考虑不平衡负载对控制系统的影响。在平均电流控制的基础上,文献[10]在电流限幅器后加入负载电流前馈控制使得输出电压外特性变硬,但文章仍未考虑非线性负载对输出电压的影响。从前人的研究中发现:在双闭环中的电流内环前增加电流前馈可有效减小输出阻抗值,但如何兼顾不平衡负载以及不增加额外的电流传感器、数字信号处理器的控制策略仍值得研究。
本文提出一种DG并网逆变器电压电流双闭环控制的改进策略,该策略在传统电压电流双闭环控制的基础上添加了经过低通滤波器的负载电流前馈控制,从而减小了DG并网逆变器输出阻抗大小,进而提高了输出电压稳定性。本文首先介绍了采用传统电压电流双闭环控制的并网逆变器等效模型,并且分析了输出阻抗对逆变器输出电压动态变化的影响;其次详细阐明了所改进的负载电流前馈控制策略;最后通过对比传统双闭环控制与改进策略的仿真结果,验证了改进策略的有效性与优越性。
1 并网逆变器传统控制
图1为多个分布式电源并联的交流微电网图,分布式电源发出的直流电被逆变器变换成交流电后经传输线路接入微电网公共耦合点(Point of Common Coupling , PCC),并通过静态开关(static transfer switch , STS)实现与微电网的连接或断开。微电网中的负载一般分为直接连接分布式电源的本地负载和连接在PCC处的公共负载两种形式。图2a为DG并网逆变器的主电路图,逆变器输出的电压需经LC滤波器滤波才能得到适用负载的电压,其中Lf、Cf分别表示滤波电感、滤波电容,传输线路阻抗Zg=R+jX。

图 1 多个分布式电源并联的微电网示意图

(a)DG并网逆变器的主电路图
1.1 下垂控制
并网逆变器的下垂控制模仿同步发电机的外特性可根据输出功率自动调节输出电压和频率,且可工作在微电网的并网模式和孤岛模式下。由于在低压微电网中线路阻抗主要呈阻性[7],因此DG并网逆变器采用有功-电压、无功-频率下垂控制,具体形式如下:
其中V、ω分别表示下垂控制输出参考电压的幅值和角频率,而Vo表示额定输出电压幅值,ω0表示额定输出电压角频率。Pi、Qi分别表示逆变器实际输出有功、无功功率,而Po、Qo分别表示逆变器额定输出有功、无功功率。m表示有功下垂系数,V/W;n表示无功下垂系数,Hz/var。
1.2 虚拟阻抗控制
各分布式电源与微电网之间的线路阻抗存在差异,使得各逆变器输出电压在线路阻抗上产生的电压跌落不同,进而导致P-V下垂控制无法精确分配负载有功功率。为了减小各逆变器线路阻抗差异对负载功率分配的影响,可采用虚拟阻抗控制。虚拟阻抗控制是在DG并网逆变器控制环节添加虚拟阻抗Rv,模拟在真实线路中串/并联阻抗改变线路等效阻抗值的做法;值得注意的是虚拟阻抗的加入同样会引起下垂控制输出参考电压Edq的跌落,添加虚拟阻抗后电压环的参考值
urdq=Edq-iodqRv
1.3 电压电流双闭环控制
电压电流双闭环控制一般采用电压外环内嵌电流内环的控制结构,同时使得内环动态响应速度要远快于外环。考虑到双闭环控制采用了PI调节器,而三相桥式逆变器输出的电压、电流均为三相交变量,想要消除稳态误差则需先将三相物理量转换到两相同步旋转坐标下。三相静止abc坐标下与两相同步旋转dq坐标下的物理量说明:ioabc、iodq表示逆变器输出电流;uoabc、uodq表示逆变器输出电压;iLabc、iLdq表示逆变器输出电感电流;uabc表示三相桥式逆变器桥臂电压;E∠φ、Edq表示下垂控制输出参考电压;urdq、irdq分别表示电压环的参考值和电流环的参考值。
其中电流内环PI调节器的传递函数GiL(s)=kpi+kii/s,电压环外环PI调节器的传递函数
Guo(s)=kpv+kiv/s。
2 并网逆变器等效模型分析
2.1 并网逆变器戴维南等效模型
从图2b中能够看出电流内环的前馈解耦量与LC滤波环节的耦合项可以抵消,消除电流内环冗余项后得到电流内环的闭环传递函数
此时电压电流双闭环控制框图见图3a。
由于电流内环的动态响应速度要远快于电压外环,因此在考虑电压外环控制时将电流内环的传递函数视为1,此时图3a中的电压外环前馈解耦量便能与LC滤波环节的耦合项抵消,消除电压外环中冗余项后得到电压外环的最终前馈传递函数Guc(s)=Gic(s)·Guo(s),此时电压电流双闭环控制框图见图3b。

图 3 dq坐标下电压电流双闭环控制简图
根据图3b可以推算出电压电流环的整体闭环传递函数如下:
根据上式可以得到DG并网逆变器的戴维南等效模型见图4a。其中受控电压源的约束函数
逆变器输出阻抗
由于虚拟阻抗同样能引起下垂控制输出参考电压的跌落,因此在研究并网逆变器的戴维南等效模型需考虑虚拟阻抗的存在,考虑虚拟阻抗控制的并网逆变器戴维南等效模型见图4b。其中考虑虚拟阻抗后新的逆变器输出阻抗
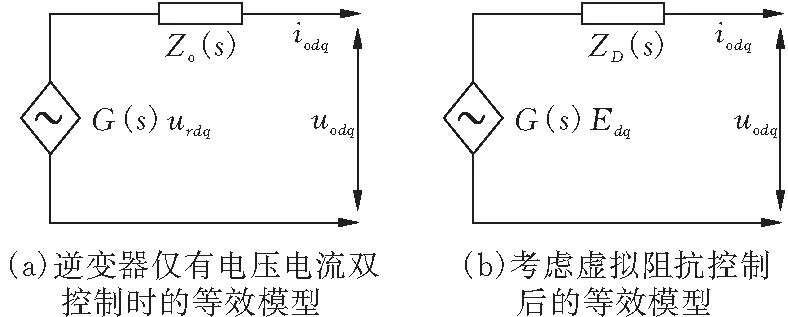
图 4 DG并网逆变器戴维南等效模型
ZD(s)=G(s)Rv+Zo(s)
2.2 并网逆变器输出阻抗分析
由DG并网逆变器戴维南等效模型可以得出逆变器输出电压
uodq=G(s)Edq-ZD(s)iodq
根据上式可知,在孤岛模式下微电网中逆变器失去了大电网的支撑,其输出电压易受外界负载影响。文献[7]通过对比ZD(s)与Zo(s)的伯德图发现:在低频段ZD(s)与Zo(s)的幅频特性曲线基本重合,因此在低频段可由Zo(s)代替ZD(s);此外,该文章通过分析并网逆变器的小信号模型发现,当减小逆变器输出阻抗时控制系统的动态性能与稳定性都得以提升。综上所述,为减小负载变动对逆变器输出电压稳定性的影响,可减小逆变器输出阻抗值。
3 电压电流双闭环改进控制策略
3.1 改进控制策略等效模型
为减小逆变器输出阻抗,本文提出了一种并网逆变器电压电流双闭环改进控制策略。该策略是将逆变器输出电流经过前馈增益返回至电流内环控制的参考输入前,考虑到DG并网逆变器可能外接不平衡负载导致逆变器输出电流含有高次谐波,因此在输出电流前馈前需通过一低通滤波器。具体控制框图见图5,其中LPF表示一低通滤波器,其截止频率为ωc;kp表示逆变器输出电流前馈增益。

图 5 电压电流双闭环改进控制策略
从图5中可以看出增加输出电流前馈后,电流内环的等效传递函数不变,仍为Gic(s)。为保证逆变器等效模型中受控电压源的约束函数不变,可将输出电流前馈接入点后移,得到电压电流双闭环改进控制策略的控制框图(图6a),其中逆变器输出电流的传递函数Gio(s)如式(1)所示。
(1)
由于在低频段可用Zo(s)代替ZD(s),因此采用改进控制策略后逆变器的戴维南模型如图6a所示,其中改进后输出阻抗
3.2 改进控制策略理论分析
改进并网逆变器双闭环控制前后输出阻抗之比


表1 DG并网逆变器主电路参数

表2 DG并网逆变器控制电路参数
由图7可得,在传统电压电流双闭环中添加输出电流前馈后,逆变器输出阻抗在工频段的值要比改进前的阻抗值小。

图 7 控制策略改进前后输出阻抗伯德图
4 仿真验证
为验证改进控制策略的有效性,按图1所示在MATLAB中搭建了两台逆变器并联模型,具体电路参数按表1、表2设置。其中DG1并网逆变器采用传统电压电流输出闭环控制,其输出电压为u1;而DG2并网逆变器采用添加输出电流前馈的改进控制策略,输出电压为u2,仿真结果如图8、图9所示。

图 8 0.2 s投入负载后逆变器输出电压波形

图 9 0.6 s切除负载后逆变器输出电压波形
图8为在0.2 s时分别给DG1、DG2增加10 kW+j5 kvar的恒功率本地负载后逆变器输出电压波形,从图8中明显看出当0.2 s突增负载时DG1、DG2并网逆变器输出电压都下降了,但采用改进控制策略的并联逆变器输出电压u2能够迅速恢复原平衡状态,受负载干扰较小。图9为在0.6 s时切除5 kW+j3 kvar的恒功率公共负载后逆变器输出电压波形,从图9中不难看出:当0.6 s突然切除公共负载时DG1、DG2并网逆变器输出电压都增大了,但采用改进控制策略的并联逆变器输出电压u2能够较为迅速地恢复原平衡状态,受负载干扰较小。
5 结论
本文提出了一种并网逆变器电压电流双闭环改进控制策略,通过在电流内环的参考输入前加入逆变器输出电流前馈来减小并网逆变器输出阻抗值,减轻了孤岛模式下微电网中负载动态变化对输出电压的影响,提高了输出电压的外特性。此外,因输出电流前馈前经过低通滤波器,在一定程度上削弱了不平衡负载接入对输出电压的影响。对传统双闭环控制与改进控制策略进行了仿真对比,结果证明了改进控制策略的优越性。值得一提的是,对比图7与图8发现:并网逆变器输出电压更易受本地负载动态变化影响。下一步研究将专注于如何改进控制策略,以提高逆变器输出电压对本地负载的抗干扰性。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
北京航空航天大学学报(2022年5期)2022-06-06
数学大王·中高年级(2022年2期)2022-03-01
水能经济(2017年6期)2017-10-19
演艺科技(2017年1期)2017-03-09
现代电子技术(2016年22期)2016-12-26
电脑知识与技术(2016年18期)2016-11-02
大学教育(2016年7期)2016-07-27
