
一种三相交错并联Boost变换器内模控制策略研究*
2021-02-06 11:34:48林巨广杨洋陈松波
汽车技术 2021年2期
林巨广 杨洋 陈松波
(合肥工业大学,合肥 230009)
主题词:Boost变换器 交错并联 内模控制 永磁同步电机
1 前言
能量管理作为新能源汽车的核心关键技术之一,其发展备受关注。Boost变换器作为电动汽车能量管理的核心部件之一,可根据不同工况提供不同的母线电压,进而提高电驱动系统效率。文献[1]、文献[2]分别研究了两相和三相交错并联的DC/DC 变换器,通过试验对比证明了多相并联变换器输出电压、电流纹波小于传统单相变换器。文献[3]采用传统双闭环PI控制器对三相交错并联变换器进行控制,但Boost 变换器在连续电流模式下会出现右半平面零点的频域特性,属于非最小相位系统,若控制不当会导致输出电压滞后,纹波增大。
为改善传统PI 控制算法的控制效果,学者们基于PI 控制提出了很多改进算法。文献[4]、文献[5]基于单相变换器的小信号模型对直接功率控制和前馈控制进行对比,证实了直接功率控制能够更好地抑制输出电压波动。文献[6]利用能量平衡原理提出一种新型电路能量圆概念,用来预测负载变化时的电感电流,进而对变换器进行控制。但是上述文献都没有较好地解决右半平面零点带来的动态性和稳定性问题。文献[7]、文献[8]针对输入电压和输出负载未知的情况采用滑模控制,但是滑模面的建立非常复杂,参数调节困难。文献[9]、文献[10]基于单相Boost 变换器,采用模型预测控制(Model Predictive Control,MPC)算法进行控制,通过试验证明了MPC适合处理非最小相位系统的动态特性问题。MPC是一种基于约束优化使用内部模型进行在线预测的控制器,但设计过程需要大量离线计算,在实际控制中在线调试困难,无法保证控制效果。
本文提出一种双闭环内模控制算法,通过小信号模型,设计双闭环内模控制器,在接近非最小相位分量设定的性能极限下控制非最小相位系统,以降低系统在线调试难度,提高系统稳定性。
2 三相交错并联Boost变换器小信号模型建立
2.1 Boost变换器状态平均模型
本文所采用的三相交错并联Boost变换器拓扑结构如图1 所示,该结构不仅可以增加电源的输出功率,降低变换器的电压、电流纹波,实现多相冗余备份功能,还可以将其复用为车载充电机[11]。该系统主要用于新能源汽车的电驱动系统,主功率电路由6个绝缘栅双极型晶体管(Insulated Gate Bipolar Transistor,IGBT)(T1~T6)组成。其中相同相部分IGBT上、下桥臂互补导通,相邻两相移相120°导通;C为Boost 变换器输出电容;V为Boost变换器输出电压;Vg为电池端电压。

图1 三相交错并联Boost变换器拓扑结构
考虑到变换器工作时,输出负载是带有逆变器的电机负载,变换器与逆变器之间通过直流链进行耦合,在稳态工作情况下,变换器只向逆变器传输有功功率,在忽略逆变器损耗时,电机需要的输入有功功率近似等于直流侧输出的功率。此时可以将变换器的后级逆变器系统等效为电阻负载R[12],其阻值近似为:

式中,P为Boost变换器输出功率。
定义第n相IGBT导通和关断的二值逻辑开关函数为:

由基尔霍夫电压定律建立第n相回路的电压方程:

式中,L为各相电感;iLn为电感电流。
考虑所有相回路方程之和:

整理得:

根据基尔霍夫电流定律,建立高压侧电容正极节点方程为:

可以看出,只需求得Sn、SniLn的周期平均值,即可实现对式(5)、式(6)的均值化处理。利用状态空间平均法[13],可得到第m个周期内Sn和SniLn的平均值分别为:
2.2 三相均流Boost变换器的小信号模型
为了使三相并联Boost 变换器各相承受的电压、电流应力状况一致,即变换器系统输出的总负载电流必须平均分配到变换器的每一相,本文采用平均电流法进行均流控制,相比于主、从均流法,该方法虽然增加了2个电流传感器,但是实现了多相冗余,提高了变换器的可靠性和总体寿命。
现假设在变换器稳态运行的某一时刻,第n相(n=1,2,3)电感电流iLn和该相占空比dn出现扰动,而其余两相电感电流和占空比仍维持稳定值,根据式(5)和式(6),系统的状态方程可以描述为:
引入扰动:
式中,IL、V、Vg、D分别为、dn(t)的稳态值;为各自的扰动值;D′=1-D为该相上桥占空比。
将式(11)分别带入式(9)和式(10)中,消去直流项和二阶交流项并忽略电池电压扰动,对其进行拉普拉斯变换,得到任意相占空比dn到电感电流iLn的传递函数为:

任意相占空比dn到输出电压V的传递函数为:

电感电流iLn到输出电压V的传递函数为:

式(12)~式(14)即为本文内模控制中的控制对象模型。
3 Boost变换器的内模控制器设计
3.1 内模控制
内模控制(Internal Model Control,IMC)是一种基于对象模型设计控制器的方法。作为一种先进的鲁棒控制方法,内模控制具有设计简单、整定参数少、鲁棒性强、控制性能好等优点[14]。
图2 所示为内模控制结构,其中r(s)为系统输入信号,N(s)为外界扰动,y(s)为系统输出信号,G(s)为被控对象,Gm(s)为被控对象的模型,不受外界环境影响,GIMC(s)为内模控制器。内模控制结构的一个显著特点就是采用了与被控对象并行的内部模型,反馈信息中包含了模型预测与被测信号之间的差异和干扰信号,以及模型失配信息即被控对象与模型之间的误差,迫使被控对象遵循模型来工作,因此,内模控制本质上是一种预测结构控制算法。
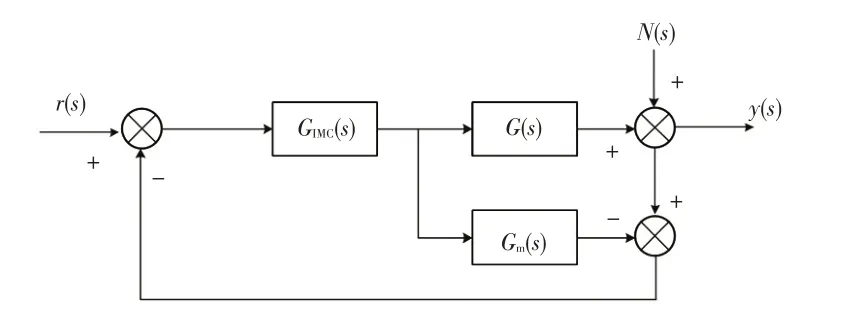
图2 内模控制结构
为了保证三相交错并联Boost变换器内模控制的快速性和鲁棒性,本文采用如图3所示的双闭环内模控制模型,其中内环为电流环,外环为电压环,Boost 变换器设计参数如表1所示。
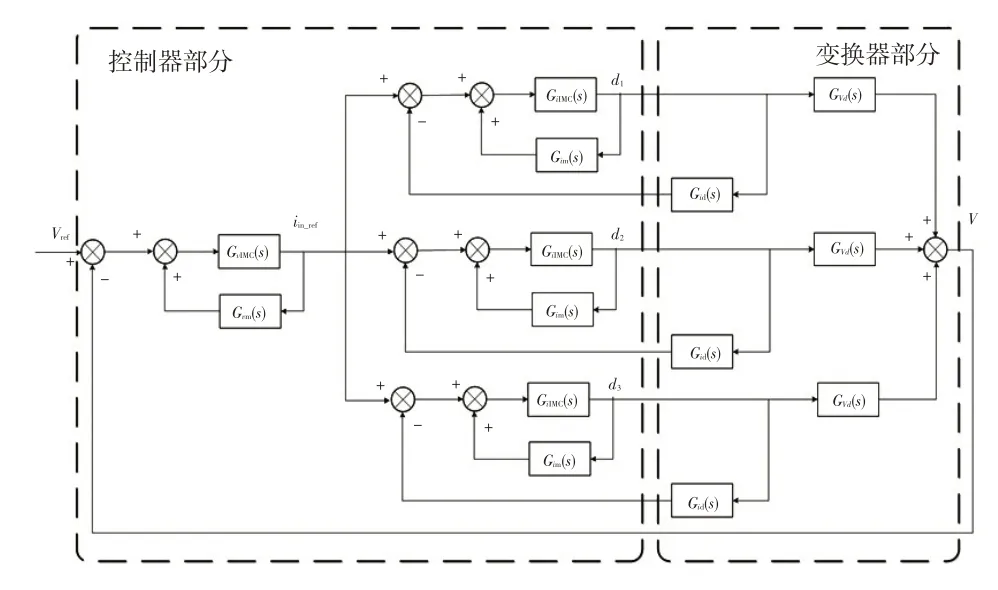
图3 三相交错并联Boost变换器内模控制模型
3.2 电流环内模控制器设计
由图2 可知,如果设计电流环内模控制器GiIMC(s)=1/Gim(s)=1/G(s),则其为输出可以完全跟踪输入的理想控制器。但上文在建立Boost变换器小信号模型时忽略了电感和开关管内阻,所以此时建立的小信号模型并不完全等于被控对象,存在模型失配问题。模型失配可能会导致系统的快速性和鲁棒性降低,控制质量变差,甚至造成系统失稳[15]。因此,需要在电流环内模控制器中引入低通滤波器fi(s)来降低模型失配带来的影响,引入低通滤波器可以使内模控制器具有稳定的极点,保证了控制器的稳定性并可调节系统的稳定性和鲁棒性。因此有:
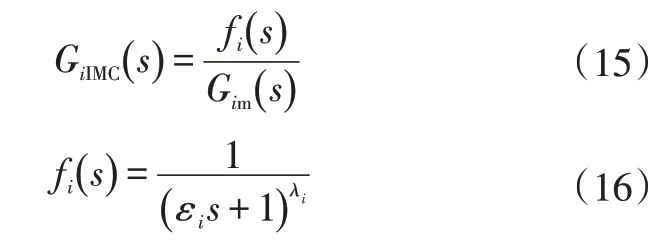
式中,εi为电流环低通滤波器参数;λi为被控对象模型Gim(s)的相对阶数,为保证GiIMC(s)的稳定性,取λi=2。

表1 Boost变换器设计参数
所以得到:

为了提高控制精度,三相电感电流的采样频率设为30 kHz,根据香农采样定理[16],要不失真地复现模拟信号,采样频率不能小于模拟信号频谱中最高频率的2倍,所以设计电流环的带宽在10 kHz 左右。利用MATLAB中的Simulink工具搭建如图4所示的电流环结构模型,调节内模控制器中唯一可调参数εi。最终得到εi=1.19×10-5,幅值裕度为∞,相位裕度为76.3°,带宽为10.8 kHz,保证了电流环的稳定性、快速性和抗干扰能力。电流环开环Bode图如图5所示。

图4 电流环结构
3.3 电压环内模控制器设计
在电压环内模控制器设计中,由于被控对象模型Gvm(s)包含右半平面零点,是一个非最小相位系统,如果将电压环内模控制器简单设计成GvIMC(s)=1/Gvm(s)=1/G(s),会产生一个物理上不可实现的控制器。因此需要将被控对象模型Gvm(s)进行分解:

其中Gvm+(s)包含了对象模型的右半平面零点,且有Gvm+(0)=1,Gvm-(s)为对象模型的最小相位部分,这样分解可以将非最小相位的影响最小化。即:
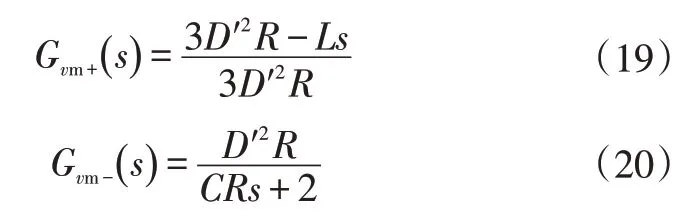
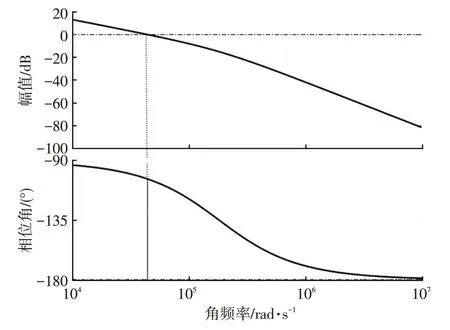
图5 参数整定后电流环Bode图
此时电压环内模控制器可设计为GvIMC(s)=1/Gvm-(s),由于上文提到存在模型失配问题,因此,电压环内模控制器也需要引入低通滤波器fv(s)来降低模型失配的影响,低通滤波器还能配置电压环内模控制器的极点,使之物理上可实现,保证了控制器的稳定性并能调节系统的稳定性和鲁棒性。即:

式中,εv为电压环滤波器参数,是电压环内模控制中唯一可调参数,决定了系统的响应速度;λv为被控对象模型Gvm(s)的相对阶数,为保证GvIMC(s)的稳定性,取λv=2。
因此得到:

因为电压环中存在非最小相位部分,右半平面零点会降低系统的稳定性[17-18],所以电压环的带宽需小于右半平面零点的转折频率。根据式(13)可得Boost变换器电压环右半平面零点的转折频率ω0为:

电压环内模控制器参数εv近似地与电压环闭环带宽成反比,εv的值越小,带宽越宽,响应速度越快,但鲁棒性变差,反之,快速性降低但鲁棒性变强。为了避开非最小相位特性对系统稳定性的影响并且保证电压环的快速性,利用MATLAB 中的Simulink 搭建如图6所示的电压环结构模型,对电压环内模参数εv进行调节。最终得到εv=2.11×10-3,幅值裕度为13.1 dB,相位裕度为49.9°,带宽为182 Hz,幅值裕度和相位裕度都为正且闭环带宽远低于右半平面转折频率,电压环具有较好的稳定性和抗干扰能力。电压环开环Bode图如图7所示。
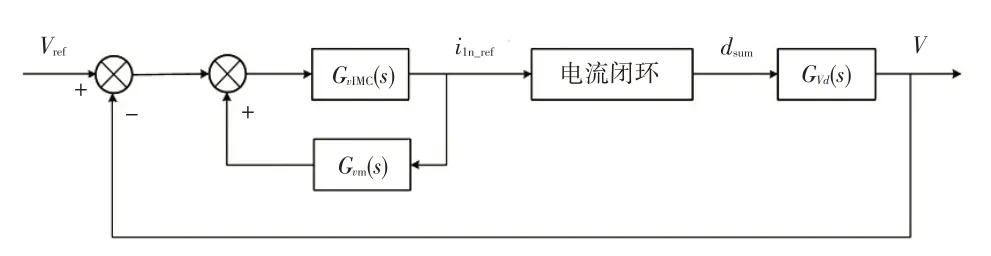
图6 电压环结构
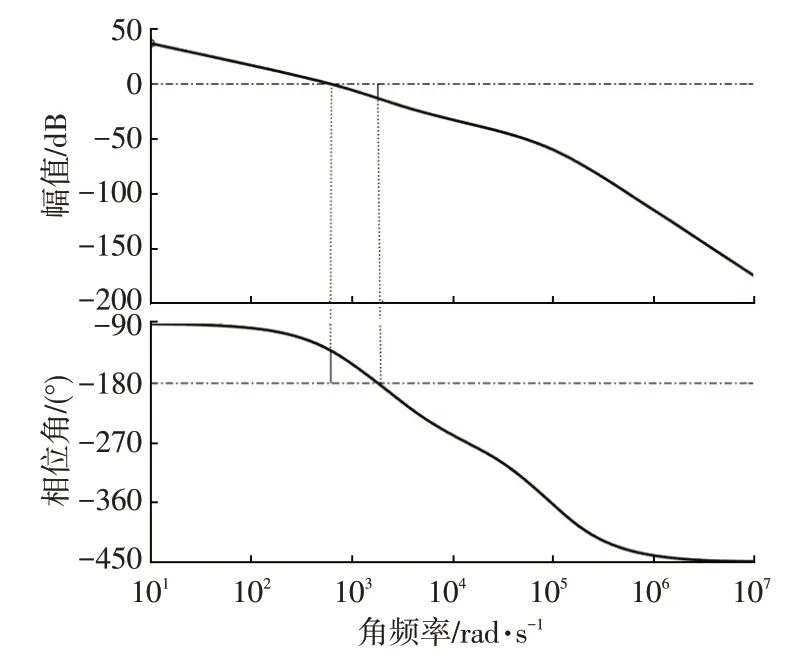
图7 参数整定后电压环Bode图
4 仿真与试验
4.1 三相交错并联Boost变换器内模控制仿真
基于Simulink搭建前置三相交错并联Boost变换器的永磁同步电机驱动系统控制模型,变换器设计参数见表1,仿真和试验工况为:Boost 变换器将直流电压从200 V 升至360 V,使电机在转速为6 000 r/min,输出功率为60 kW 的工况下持续运行。分别采用文献[3]中传统PI 控制策略和本文所述的内模控制策略进行仿真,得到Boost变换器输出母线电压的波形如图8所示。
由图8 可知,采用传统PI 控制策略的Boost 变换器输出电压波动较大,而内模控制的Boost 变换器输出电压较为稳定。相较于传统PI 控制策略,本文提出的内模控制策略能够较好地抑制在高电压、大负载下Boost变换器输出母线电压的波动,具有更好的鲁棒性。
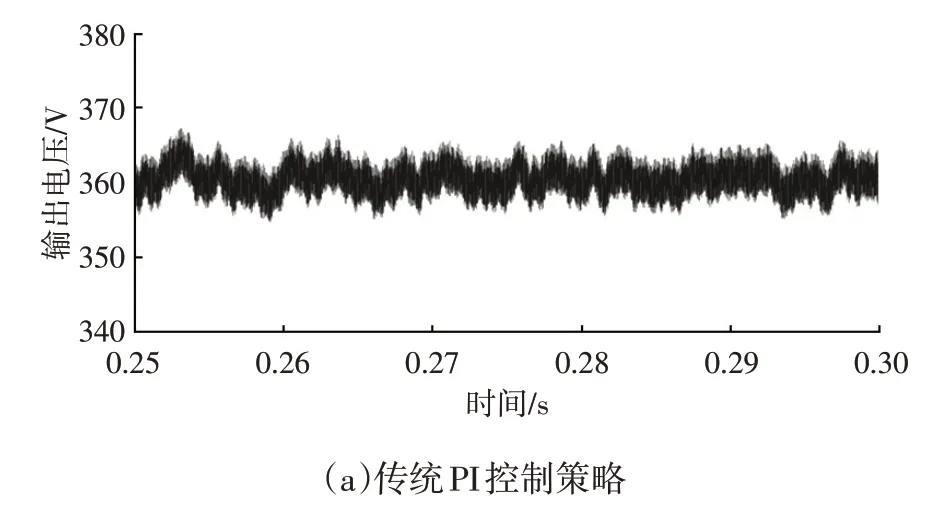
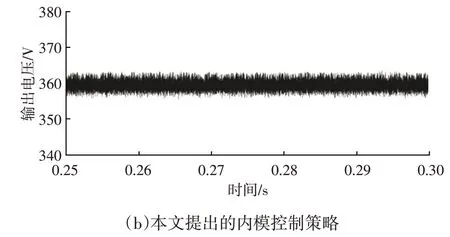
图8 采用2种控制策略的仿真结果
4.2 三相交错并联Boost变换器内模控制试验
为了验证本文提出的控制策略的有效性,在图9所示的试验平台上对本文提出的内模控制策略和传统PI控制策略进行对比试验,结果如图10所示。

图9 试验台架和Boost控制器
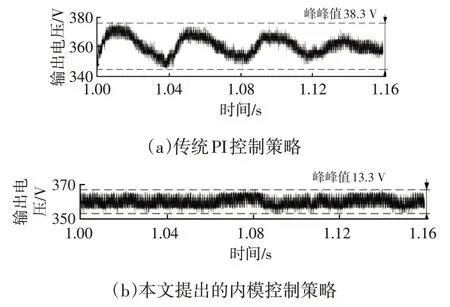
图10 采用2种控制策略的试验波形
从试验波形可看出:采用传统PI 控制策略的Boost变换器输出电压有明显波动,峰峰值为38.3 V;采用内模控制策略的Boost 变换器输出电压较为平缓,峰峰值为13.3 V。因此,相较于传统PI 控制,本文提出的内模控制策略能更好地抑制母线电压波动。
5 结束语
本文针对三相交错并联Boost 变换器系统存在右半平面零点特性,传统PI 控制策略下母线电压存在波动,控制效果较差的问题,提出一种双闭环内模控制策略。建立三相交错并联Boost 变换器小信号模型,设计出合理的双闭环内模控制器。该控制器鲁棒性强,控制效果好,且相较于传统PI控制策略对Boost 变换器难以调节,控制效果较差的特性,本文提出的内模控制策略仅需调节2个参数便可达到期望的快速性和鲁棒性,提升了控制效果,降低了在线调试的难度。仿真和试验证明了该控制策略在高电压、大负载的工况下相较于传统PI控制,能够更好地抑制母线电压波动,拥有更强的鲁棒性。
猜你喜欢
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
机电工程技术(2018年10期)2018-12-06 02:26:38
项目管理技术(2016年12期)2016-06-15 20:29:33
西南交通大学学报(2016年6期)2016-05-04 04:13:11
四川电力技术(2015年5期)2015-12-19 11:04:52
电测与仪表(2015年16期)2015-04-12 00:44:32
电测与仪表(2015年20期)2015-04-09 11:53:56
电测与仪表(2015年21期)2015-04-09 11:52:12
