平面连杆机构运动分析的三角形解法
2021-01-30 05:48
中文信息 2020年12期
(山东科技职业学院,山东 潍坊 261053)
前言
连杆机构的连杆往往作平面复杂运动,有时需要分析连杆平面上某点的位移、速度和加速度。用解析法作机构运动分析,以四杆机构为例,如图1所示,各杆长l1、l2、l3、l4、主动件l1角速度ω1和p点位置a、b,写出闭环向量方程L1+L2=L3+L4,其投影代数方程为:

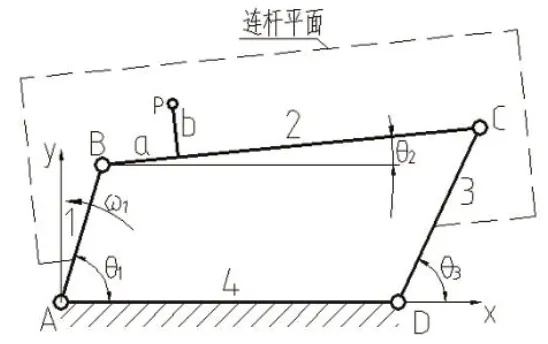
图1
(1-1)(1-2)两式组成的方程组中只有θ2、θ3两个未知数,理论上可以求出,根据几何关系,写出连杆平面上P点的坐标:

把前面求出的θ2代入,可得到P点的坐标(Xp,Yp),将(1-1)、(1-2)式对时间取一次导数,可得到:

将(1-3)(1-4)式对时间取一次导数可得到P点速度,对(1-3)(1-4)(1-5)(1-6)继续对时间取导数,可求出P点的加速度,致此完成P点的运动分析。该过程的第一步求解θ2、θ3是整个运动分析的基础,但(1-1)(1-2)组成的方程组是一个超越方程组,用基本的数学变换是不能解出的,这就需要一个更好地求解θ2、θ3的方法[1]。
一、解法与思路
为了解决求解θ2、θ3的方法,以曲柄摇杆机构为例,构造出如图2所示的多个三角形。
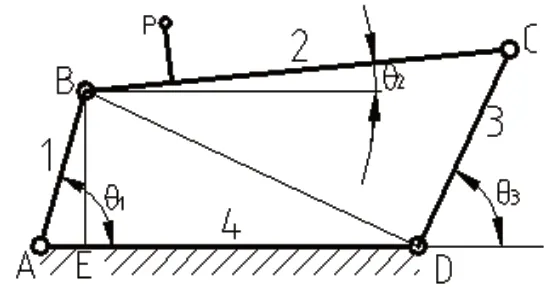
图2
在△ABE、△ABD、△BDE中,根据三角形边角关系可得到:

再利用余弦定理求出BD长度,则△BDC各边长成为已知数,在△BDC中,利用余弦定理与反正切函数结合可求出∠CBD、∠BDC,从而得到:

由式(2-1)到(2-6)即是求解θ2、θ3的过程,主动杆转到其他象限或转过特殊位置时各三角形的形状、相互位置关系会发生变化,式(2-1)到(2-6)是否仍然成立呢?下面分四种情形进行分析。
1.如图3所示,曲柄在第二象限时,ED的长度为l4加AE长度,因为θ1>90°, cosθ1<0,AE<0,所以式(2-3)成立,其他关系式与第一象限完全一样。
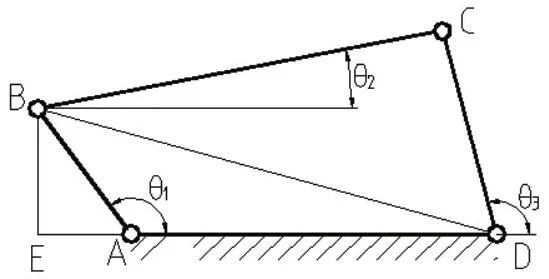
图3
2.曲柄处于第三象限且在左极限位置之前时,如图4所示。
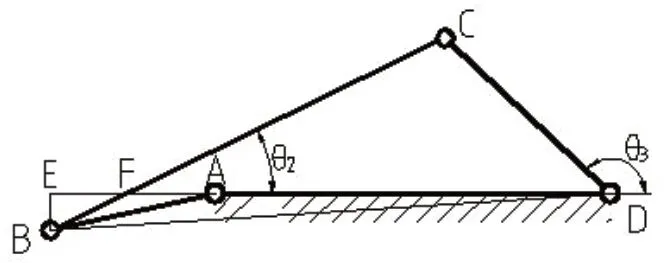
图4
此时θ2成为△BFD的一个外角,其大小等于∠CBD与∠BDE的和,因为θ1>180°,根据式(2-1)到(2-4)计算出的∠BDE<0,所以式(2-5)成立,按图θ3=π-(∠CDB-∠BDE)=π+∠BDE-∠CDB,考虑到∠BDE的符号,所以式(2-6)成立。
3.曲柄位于左极限位置之后或第四象限时,如图5所示。
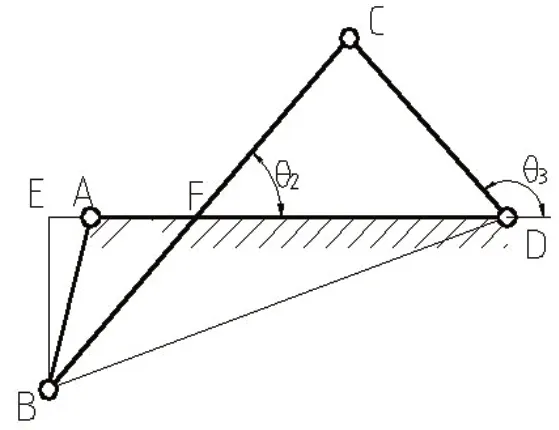
图5
分析此时的图形关系与各代数量的符号,其与情形(2)完全一致,(2-1)到(2-6)式都成立。如果曲柄与BC重合(两个极限位置),其图形位置关系与计算结果同样如此。
4.对于曲柄处于特殊位置时,与AD重合时(图形略),此时按图形得到θ2=∠CBD,θ3= π-∠BDC,按(2-4)计算则得到∠BDE=0,所以(2-5) (2-6)成立式。
由此可得到计算θ2、θ3的通项公式(2-1)到(2-6),可据此编制程序对连杆平面上的任意一点进行运动分析,θ1在0—360°以一定间隔连续取值,经过计算后可绘出P点的运动轨迹曲线、速度曲线、加速度曲线[2]。
二、结论与展望
通过构造三角形的办法,将用解析法对连杆机构进行运动分析的计算过程简化,为程序编制提供了简易可行的算法。
本文仅对曲柄摇杆机构进行了分析,根据运动图形变化关系其结论可用于双摇杆机构,对于双曲柄机构,其杆长关系,运动图形变化情形更为复杂,结论是否适用尚需进一步探讨。
猜你喜欢
现代食品科技(2022年8期)2022-09-02
机械工程师(2021年4期)2021-04-19
南方农机(2021年3期)2021-02-07
湖北农机化(2020年17期)2020-11-02
设备管理与维修(2019年22期)2019-12-19
机械研究与应用(2018年5期)2018-11-05
电子测试(2018年11期)2018-06-26
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
中南大学学报(自然科学版)(2016年2期)2017-01-19
河南科技(2014年6期)2014-02-27