
多工况随机输入下的某SUV 平顺性试验研究及其性能分析
2021-01-27 09:41:08高洁,张军
机械设计与制造 2021年1期
高 洁 ,张 军
(1.大连交通大学机械工程学院,辽宁 大连 116028;2.大连市交通口岸职业技术学校,辽宁 大连 116013;3.北京建筑大学机电与车辆工程学院,北京 100044)
1 引言
汽车行驶平顺性[1]是车辆技术发展的关键问题[2]之一,是指车辆在行驶过程中产生的振动和冲击应保持在一定界限之内,不使人体感到不舒适、疲劳、甚至损害健康的性能,它不仅影响驾乘人员的乘坐舒适度,还可能破坏车辆所承载货物的完整性,甚至危及行车安全。因此,合理的平顺性试验是车辆设计生产、改进升级的重要依据。目前,平顺性的试验研究主要是围绕某款特定车型在预设工况下进行的,文献[3]通过测试某轿车副驾驶位置在不同车速下的地板及座椅振动,对该车进行平顺性评价。文献[4]对样车进行了平顺性随机和脉冲试验,评价性能的同时建立完善了试验流程。但鉴于实车试验成本较高,周期较长,往往局限了试验条件的设定,导致数据不足,缺少对比和规律总结。随着计算机技术的发展,大量学者的研究方向更侧重于通过虚拟技术进行仿真试验,文献[5-6]基于不同的虚拟技术建立整车模型完成仿真试验,通过对试验结果的分析,提出改善车辆平顺性的有效方法。但不论虚拟技术如何发展,仿真模型如何精确,试验人员都需要通过实车试验对车辆性能进行验证。因此,保证试验工况的多样性,试验过程的完整性、试验结果的可靠性,是平顺性评价和研究的重要依据。
本课题对两辆不同年份某SUV 车进行了道路多工况随机输入行驶试验,并基于获得的不同测量点试验数据,采用加速度均方根值和加权振级相结合的方法对该车平顺性进行评价,研究不同车速工况和行驶里程增加导致悬架减震元件老化对车辆平顺性能的影响。
2 平顺性试验及评价方法
2.1 平顺性试验
汽车平顺性试验是让研究车辆在给定的路面上以不同的车速行驶,试验人员通过测试设备测量车辆特定部位的加速度值,并计算出平顺性的各项评价指标参数,进而进行相关性能评价,通常分为随机输入和脉冲输入两种工况[7]。
路面不平度[8]是车辆振动的主要外部激励,具有随机性[9],车辆运行时,驾驶员和乘客会长时间处于随机振动环境中,因此随机输入行驶是最常见、最基本的研究情况,降低随机输入工况下的车身振动是保证车辆良好平顺性的关键。
参照国标《汽车平顺性试验方法》进行试验,同时考虑了不同车速、不同年份车型的多工况条件,将多工况下的数据指标进行对比,进而做出平顺性评价分析。
2.2 平顺性评价方法
目前,国际上主要有四种平顺性评价标准[10-11],分别是平均吸收功率谱 AAP 标准、VDI2057-1963 标准、BS6841-1987 和 ISO 2631-1997(E)。国内GB/T4970-2009 标准主要是依据国标ISO 2631-1:1997《Mechanical vibration and shock-Evaluation of human exposure to whole-body vibration》标准制定的,并选择振动加速度均方根值作为客观评价的基本指标,加权振级作为主观评价的量化指标。
本课题参照GB/T4970-2009 标准,设定座椅靠背、座椅椅垫及驾驶员脚部地板三个位置的测量点,采用加速度均方根值和加权振级相结合的综合评价法,通过计算各测量点的单轴向加权加速度均方根值、总加权加速度均方根值、综合加权加速度均方根值进行平顺性评价,计算过程如下:
(1)计算单轴向加权加速度均方根值

式中:aj—中心频率为fj的第j 个1/3 倍频带加速度均方根值,单位为m·s-2;Ga(f)—加速度功率谱密度函数,单位为m2·s-4·Hz-1;fwj、fij—1/3 倍频带的中心频率为 fj的上、下限频率,单位为Hz;wj[12]—第j 个1/3 倍频带的加权系数,根据测量点的位置和方向不同分别取 wk、wd、wc。


(4)计算振动加权振级Leq

式中:Leq—测量点的振动加权振级;a0=10-6m·s-2[11]。
3 某SUV 平顺性随机输入试验
3.1 试验对象
本课题采用某型国产SUV 车,具体参数,如表1 所示。
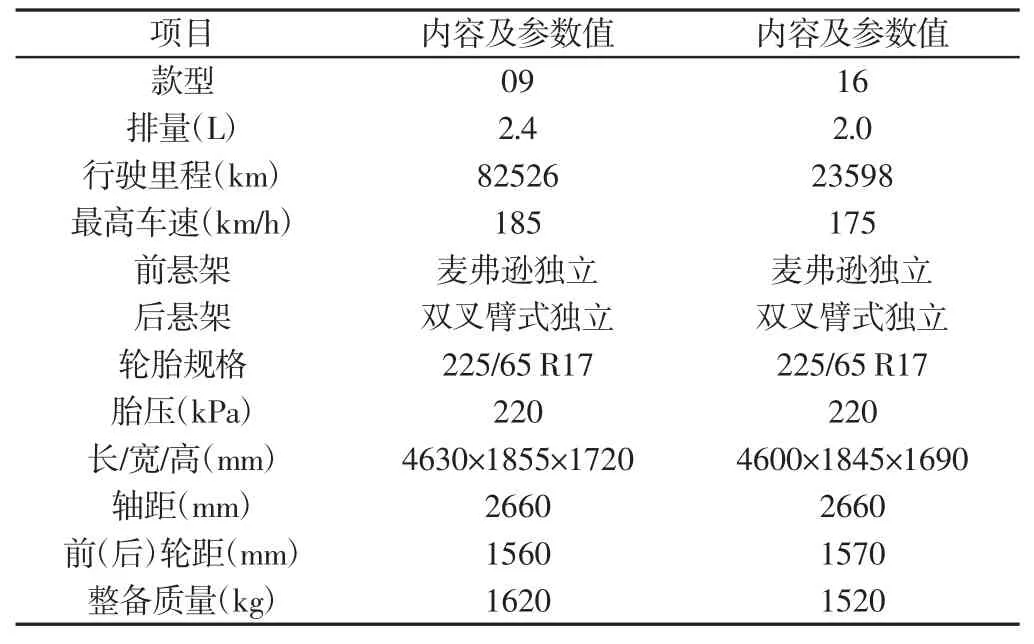
表1 某SUV 车辆具体参数Tab.1 The Specific Parameters of SUV
3.2 试验条件
本次试验地点选择的是一段长约1000m 的平整沥青路面,按照GB/T7031-2005 规定,假定试验道路为B 级路面,纵坡≤1%,路面干燥,且不平度均匀无突变。试验时天气晴朗,气温26℃左右,风速不大于5m/s。
3.3 试验方法及设备
试验设备包括加速度传感器、放大器、数据采集仪、车速仪、滤波器等,并且要求测试系统应适宜于冲击测量,其性能稳定、可靠,频响范围应当不小于(0.1~200)Hz。仪器的指示部分具有指示峰值和均方根值的功能,时间计权的时间常数不小于1s,积分时间不小于60s。实施测量之前,测量系统处于检定的有效期内,并进行正确的灵敏度、频率响应特性、幅值线性度校准,系统误差不大于(±3)%。
试验时,车辆以 20km/h,40km/h,60km/h,80km/h 进行测试,由车速仪监控车速,并保证车速偏差在(±4)%以内。试验人员佩戴安全带,驾驶员应将双手自然置于方向盘上,熟练地驾驶车辆,保持车辆的稳定行驶状态,测试部位人员应保持放松状态,自然靠在靠背上。
试验系统及试验过程,如图1 所示。

图1 试验系统及试验过程Fig.1 Test System and Process
3.4 试验数据采集
试验过程中,各测量点布置情况,如表2 所示。

表2 试验测试点布置情况Tab.2 Arrangement of Test Points
安装在测量点上的加速度传感器需测量三个方向的振动,即X 轴(纵向)、Y 轴(横向)和Z 轴(垂直)。传感器与驾驶员紧密接触,而且在驾驶员和座椅之间放置安装传感器垫盘。在测量条件相对稳定状态下,数据采集时长20s。数据处理要求:截断频率fc=100Hz;采样时间间隔Δt=1/256s;最低采样率fmin=2000Hz;有效分辨带宽Δf=0.25Hz;使用汉宁窗。试验时,车辆以规定速度稳定行驶,进入试验路段后,启动测试仪器开始测量并记录各测量点的加速度时间历程,同时记录通过试验路段的时间,待该车驶出试验路段后关闭仪器。然后变换车速,重复上述过程,每个工况采集5 次。
4 试验结果分析及平顺性评价
4.1 试验结果分析

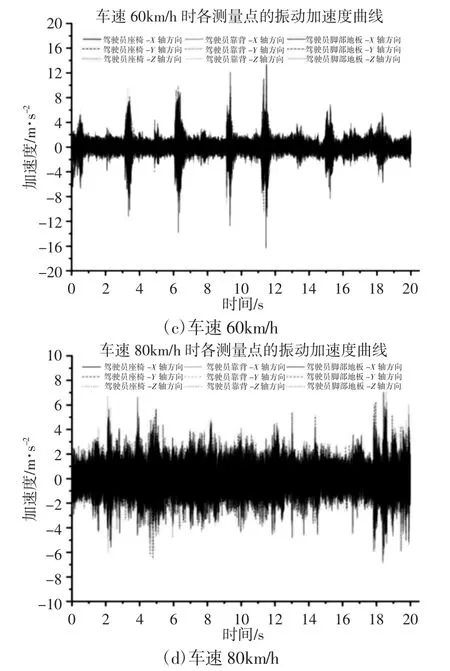
图2 09 款车在时域下的振动加速度Fig.2 Vibration Acceleration in Time Domain of 09 Model
通过试验,直接获得时域下,不同车速时车辆不同测量点X、Y、Z 三个方向的振动加速度,如图2、图3 所示。
从图2、图3 可以看出,在不同工况下,脚部地板测量点的振动加速度值最大。需要说明的是,试验中布置在驾驶员脚部地板上的传感器是固定在座椅滑道刚性零部件上,有一定的缓冲作用,所以实际的振动幅度要大于试验结果。
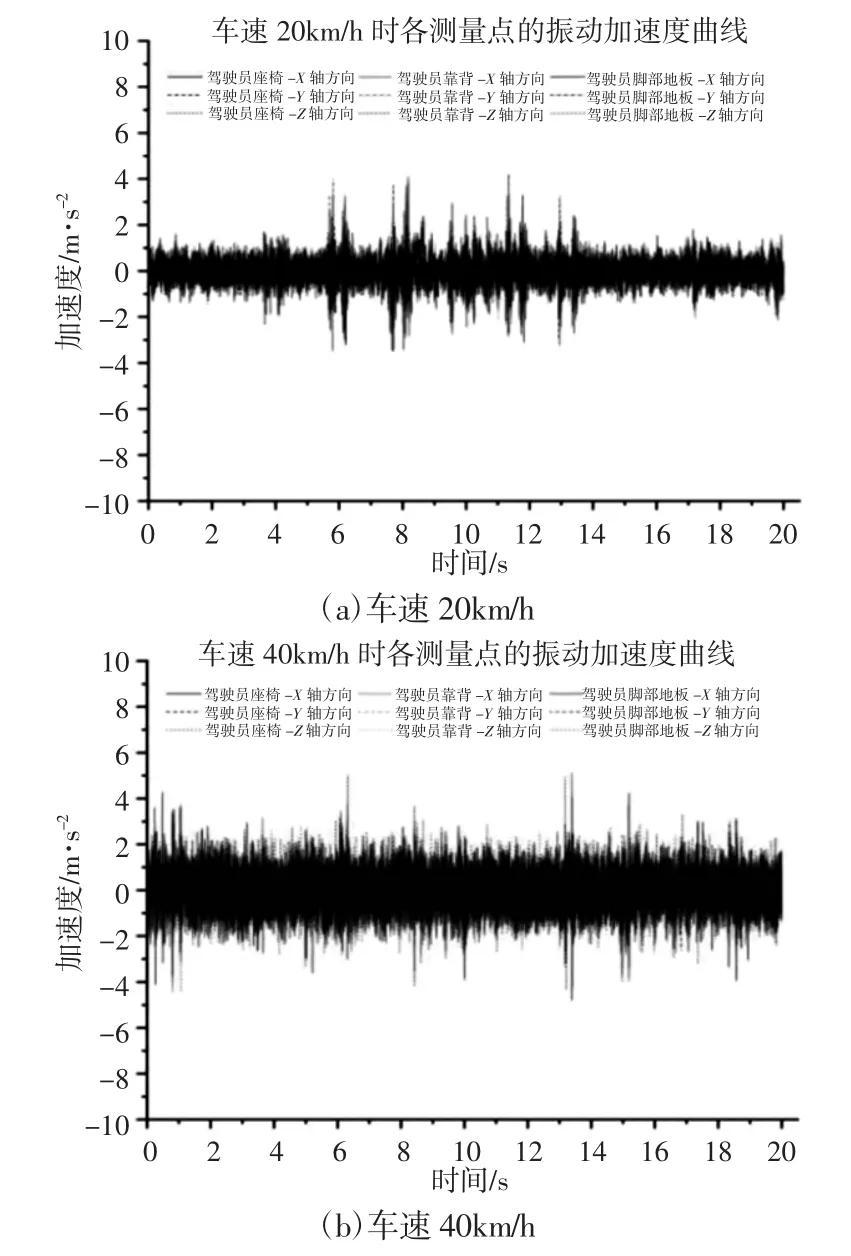
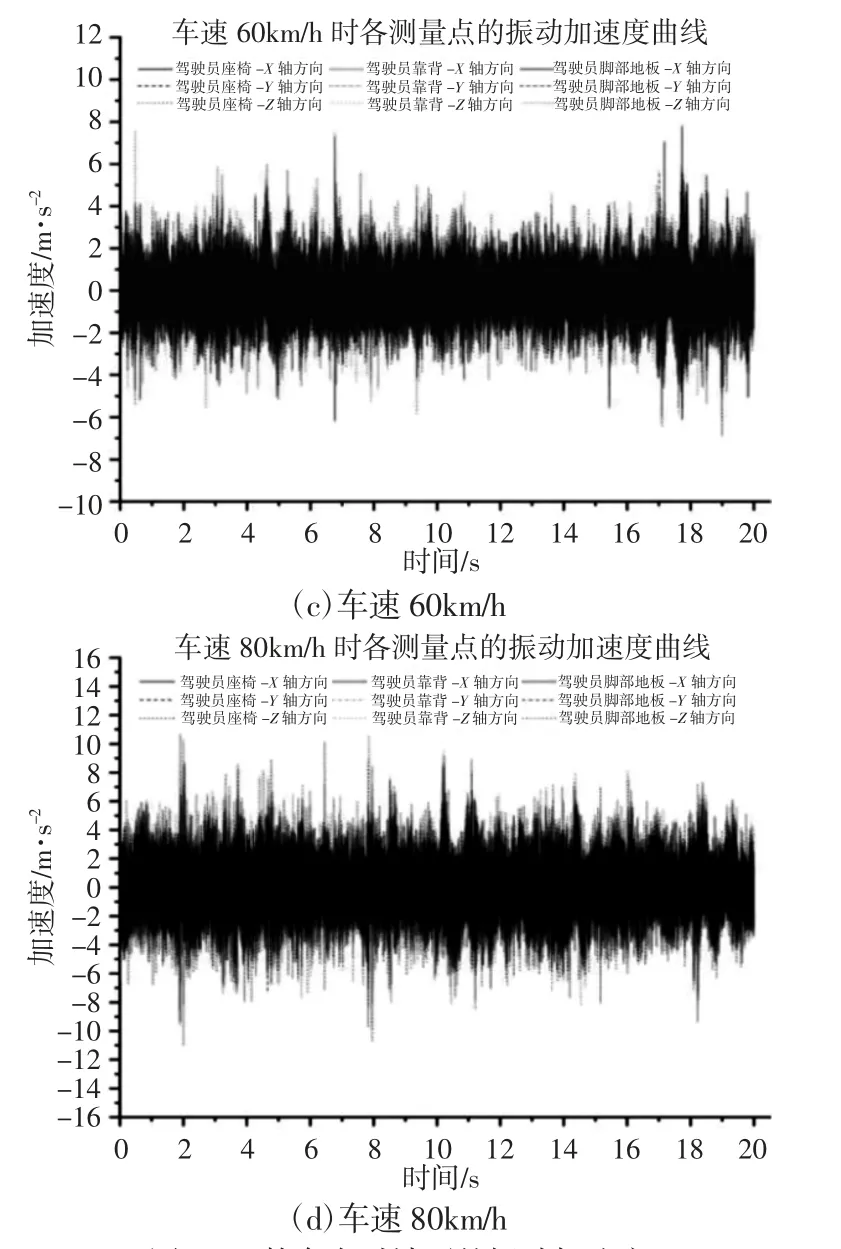
图3 16 款车在时域下的振动加速度Fig.3 Vibration Acceleration in Time Domain of 16 Model
此外,每个测量点在Z 轴(垂直)的振动加速度值均是最大的,说明测量点垂直方向的振动是影响乘坐舒适性的主要因素。因此,控制垂直方向的振动幅值是保证车辆良好平顺性的关键。
将振动加速度时域数据通过Matlab 进行处理,可获得频域下,不同车速时车辆各测量点X、Y、Z 三个方向的振动加速度功率谱密度,如图4、图5 所示。
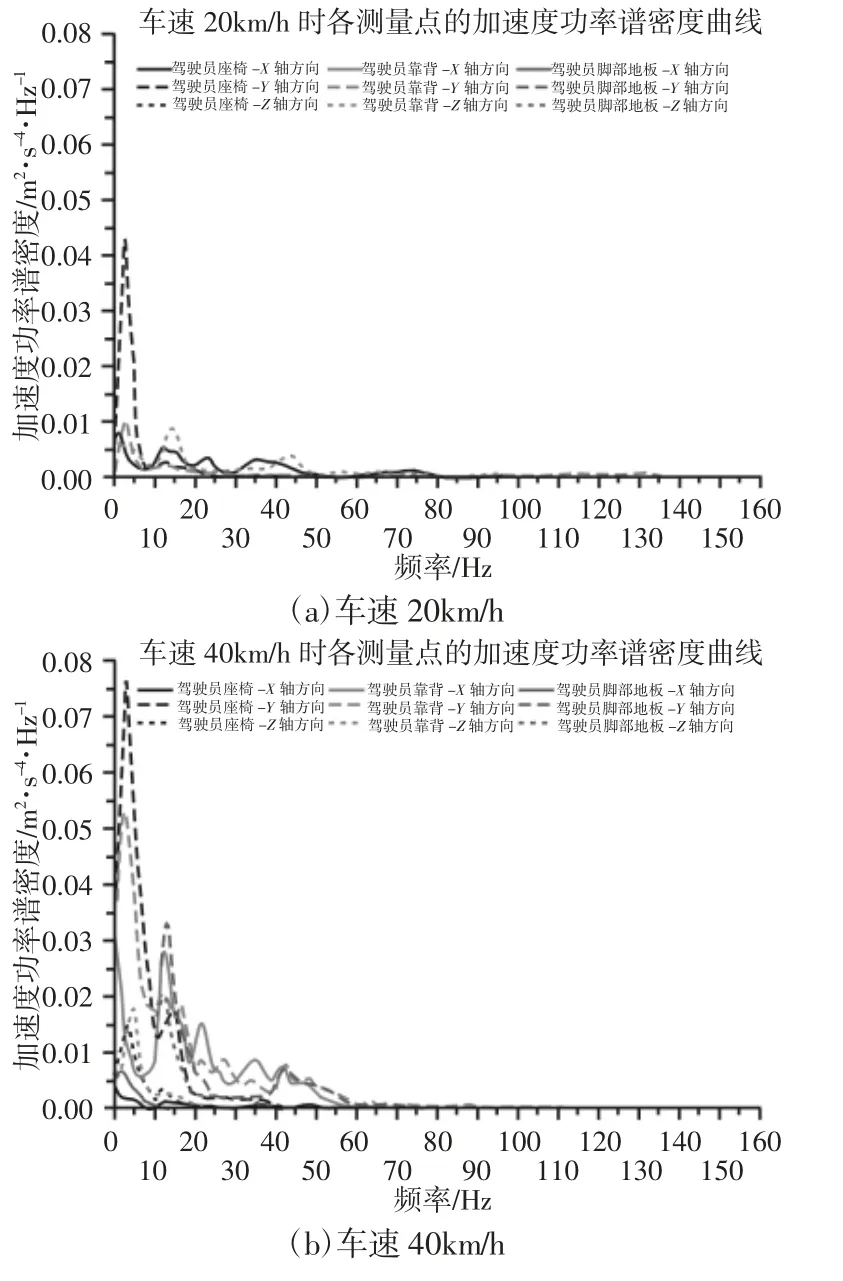

图4 09 款车在频域下的振动加速度功率谱密度Fig.4 Power Spectral Density of Vibration Acceleration in Frequency Domain of 09 Model
从图4、图5 可以看出,不同工况下,脚部地板测量点Z 轴(垂直)的加速度功率谱密度峰值出现了6 次,对应的频率为2.9Hz、2.75Hz、1.8Hz、2.35Hz、0.75Hz 和 1.05Hz。
09 款车型在车速40km/h 时,脚部地板测量点X 轴(纵向)的加速度功率谱密度出现了1 次峰值,对应的频率为12.5Hz。16款车型在车速60km/h 时,驾驶员靠背X 轴(纵向)的加速度功率谱密度也出现了1 次峰值,对应的频率为0.05Hz。依据国标中人体振动敏感频率范围,如表3 所示。该车振动加速度功率谱密度产生峰值时所对应的频率均避开了人体振动的敏感频率,确保了该车良好的平顺性。

表3 人体振动敏感频率范围Tab.3 The Frequency Range of Human Body Vibration
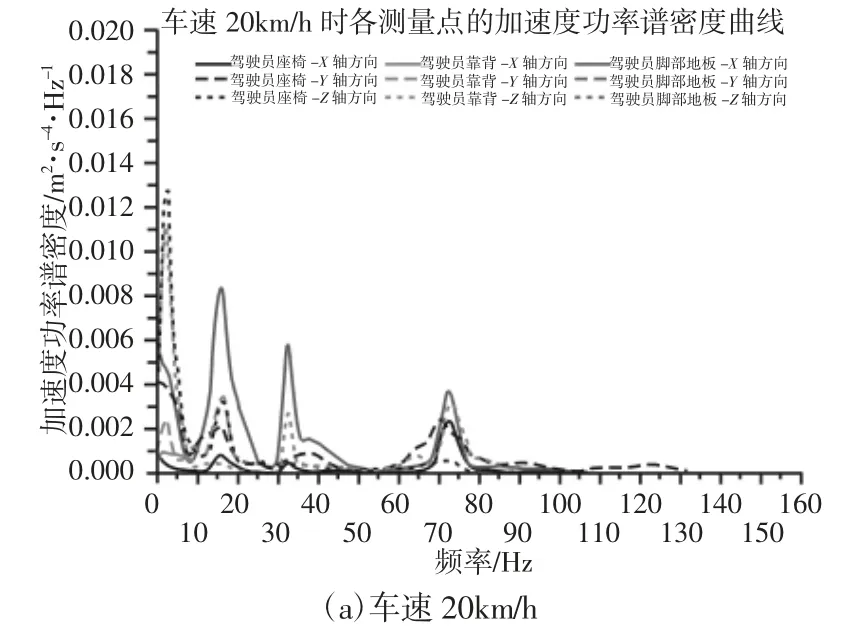
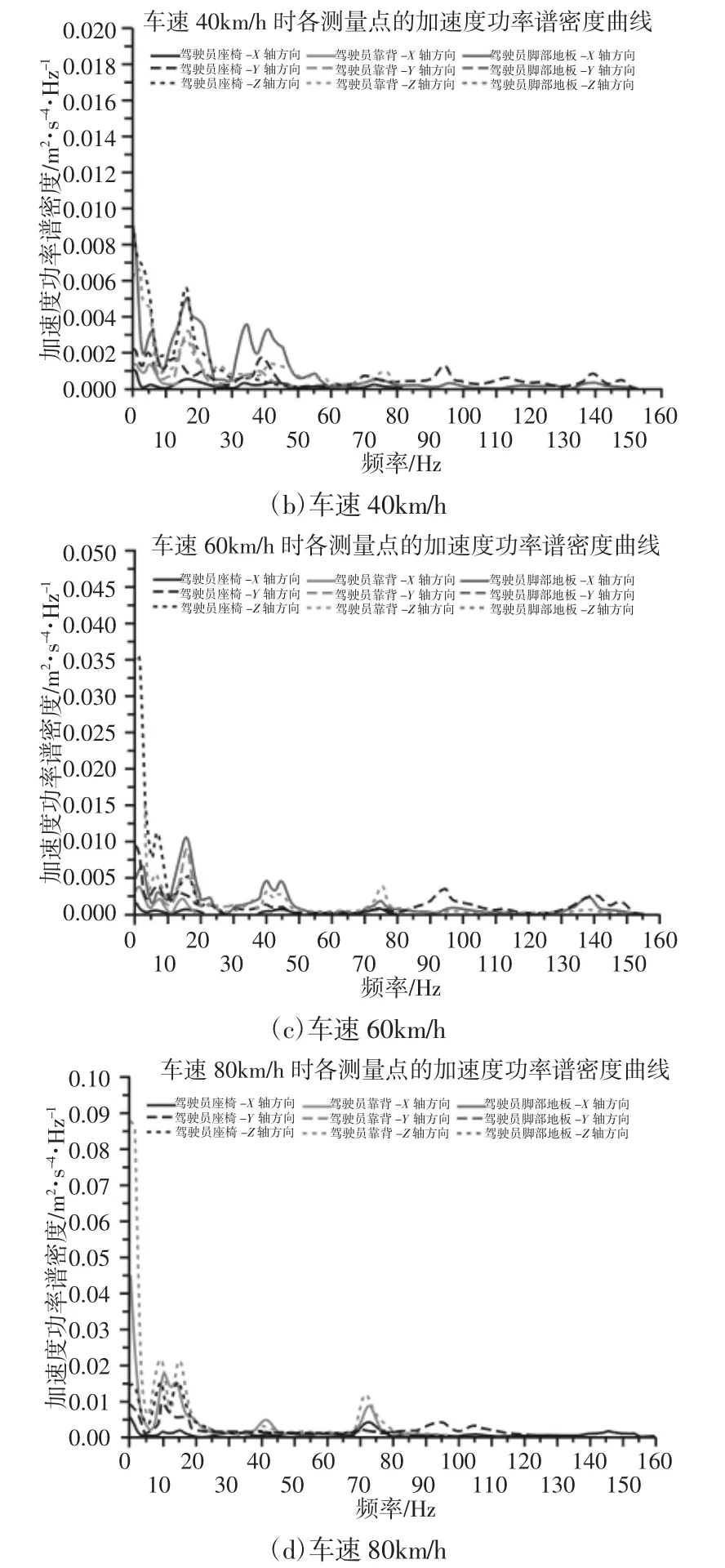
图5 16 款车在频域下的振动加速度功率谱密度Fig.5 Power Spectral Density of Vibration Acceleration in Frequency Domain of 16 Model
表4 加权加速度均方根值Tab.4 Weighted Acceleration Rms Values
4.2 某SUV 平顺性评价
依据国标评价方法的相关内容要求,根据式(1)、式(2),应用Matlab 计算不同车型不同车速工况下各测试点不同轴向的加权加速度均方根值,如表4 所示。根据式(3)计算车辆在不同车速工况下的总加权加速度均方根值,如表5 所示。根据式(4)计算车辆在不同车速工况下的综合加权加速度均方根值,如图6 所示。数据表明,随着车速的增加,该车的综合加权加速度均方根值不断增加,且09 款在60km/h 时达到最大值,16 款在80km/h 达到最大值。对比同一车型综合加权加速度均方根值随着车速的增加情况,如表6 所示。

表5 总加权加速度均方根值Tab.5 Total Weighted Acceleration rms Values
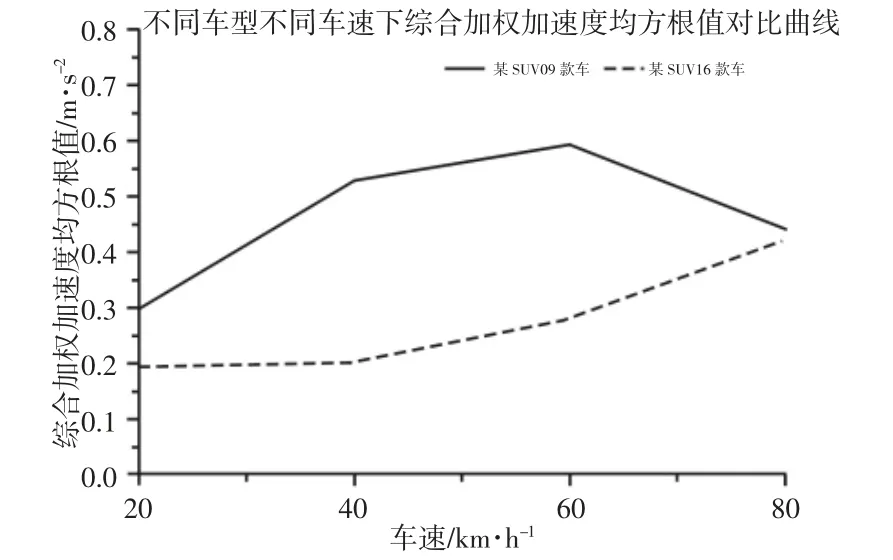
图6 综合加权加速度均方根值Fig.6 Comprehensive Weighted Acceleration rms Values

表6 综合加权加速度均方根值随车速的变化Tab.6 Change of Comprehensive Weighted Acceleration rms Values with Speed
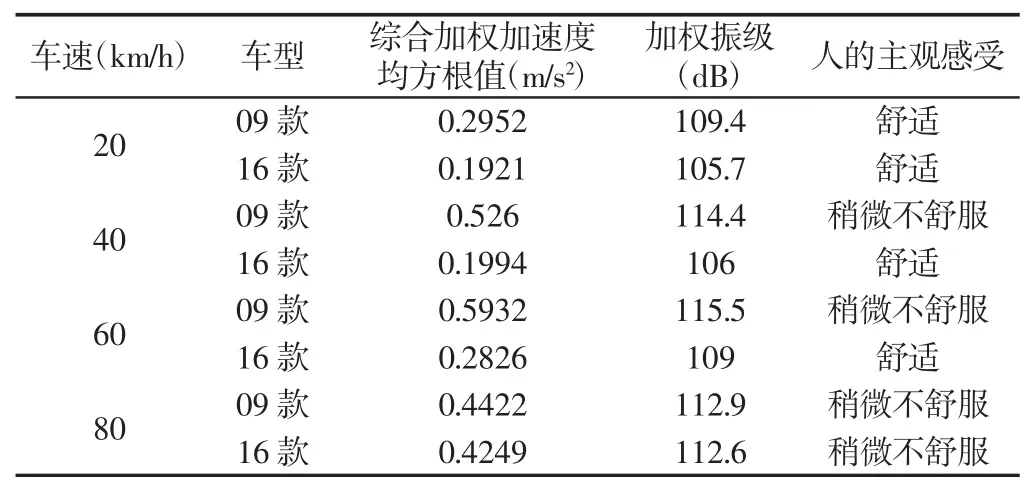
表7 加权振级及人的主观感受Tab.7 Weighted Vibration Level and Subjective Feeling of Human
数据表明,09 款车在低速阶段的振动增幅明显,且波动较大,而16 款车随着车速的增加,振动增比较平稳。这是由于随着车辆行驶里程的增加,发动机、底盘悬架、变速箱等部件的磨损和老化加剧所造成的,而09 款车辆已接近悬架更换周期10 万公里[12],其减振器缓冲车身振动的能力下降,因此会造成平顺性能明显变差。为了更加准确、全面的平顺性评价分析,根据式(5)计算车辆在不同工况下的加权振级,并给出了振动量级与人的主观感受之间的关系,该SUV 的舒适性评价,如表7 所示。试验表明,该车平顺性均在人体“稍微不舒适”范围内,说明其平顺性能良好。将两款车型的振动加权振级在不同车速工况下进行对比,发现16 款比09 款车的平顺性分别提升了3.4%、7.3%、5.6%和0.3%,在低速区,两车的平顺性都较好,在中速区,车况对平顺性的影响还是很明显的,而在高速区,两车的平顺性都在变差。
5 结论
(1)多工况随机输入时,时域下,该车各测量点的Z 轴(垂直)振动加速度值均大于其他两个轴向,且随着车速的增加,车辆振动幅值变大,且出现不同程度的波动,说明车速对平顺性有直接的影响。(2)多工况随机输入时,频域下,该车各测量点振动加速度功率谱密度取得最大值时对应的频率均避开了人体敏感频率范围,且驾乘人员的主观感受良好,说明该车的平顺性符合标准。(3)随着车辆使用里程的增加,车况变差,车辆元件的磨损和老化造成平顺性能下降,这与实际使用经验相符,验证了本次试验数据的可靠性。值得一提的是,影响平顺性的关键因素是悬架,当车辆接近时悬架达到更换周期,如果不及时对悬架减振器进行维护保养,会进一步影响车辆钢板弹簧、车身和车架等部件的使用寿命和车辆的行驶安全性。
猜你喜欢
航空学报(2022年5期)2022-07-04 02:24:32
机械设计与制造(2022年5期)2022-05-19 03:33:54
装备制造技术(2020年2期)2020-12-14 03:09:28
模具制造(2019年10期)2020-01-06 09:13:08
汽车零部件(2019年10期)2019-11-13 05:59:56
今日农业(2019年12期)2019-08-15 00:56:32
自动化与仪表(2019年2期)2019-03-06 08:24:26
数字通信世界(2019年1期)2019-02-14 02:00:38
空气动力学学报(2013年2期)2013-10-21 11:54:18
汽车与新动力(2012年5期)2012-03-25 10:09:44
