基于IPSO-BP的轻型汽油车道路排放预测
2021-01-23 08:36:20王志红刘志恩
北京交通大学学报 2020年6期
王志红,严 浩,袁 雨,刘志恩
(武汉理工大学 a.现代汽车零部件技术湖北省重点实验室,b.现代零部件技术湖北省协同创新中心,武汉 430070)
机动车数量持续增加,给环境和人体带来更多的危害,城市机动车又以轻型汽油车为主,加强对轻型汽油车排放的管理至关重要[1].受实际工况影响,试验室检测不能真实反映实际道路的排放水平[2].因此,便携式排放测试系统(PEMS)发展起来,安装在机动车上,其测量数据能够反映实际道路上的排放水平.国Ⅵ标准的实施,给机动车排放提出了更高的要求,基于此,建立一种轻型汽油车排放预测模型,不仅节约试验时间,还可减少因重复RDE试验的经济投入,具有一定的理论意义和工程价值.
国内外学者基于以上问题进行了大量研究,神经网络模型具有开发周期短、经济成本低和预测精度要较高等优点,但同时存在一些不足.文献[3]利用燃烧学仿真软件建立了中速柴油机的NOx排放预测模型,但存在建模方法复杂和计算过程慢的缺点,预测精度较差.文献[4-6]利用BP神经网络模型进行了排放预测,但由于汽车排放预测存在非线性、特性参数多的问题,导致预测误差较为明显.文献[7-8]在神经网络中分别加入偏最小二乘法和遗传算法对其进行优化,所建模型具有充分提取自变量信息的优点,同时对训练数据的需求小,但非线性拟合能力较差.文献[9]以BP神经网络为基础,引入LM优化算法,建立CO排放预测模型,仿真结果接近实测数据.文献[10]建立了多因素神经网络模型,并结合台架试验数据分析了各试验因素的重要度和试验控制性.
对于上述排放预测模型研究存在的问题,通过算法改进来提高模型的泛化能力,因此本文作者从符合国Ⅵ标准的轻型汽油车实际行驶排放(RDE)测试出发,以PEMS测得排放数据作为基础,在BP神经网络中加入改进粒子群算法(Improved Particle Swarm Optimization Algorithm,IPSO),建立轻型汽油车排放预测模型.
1 RDE试验与数据
1.1 RDE试验基本要求
为了体现被测车辆的实际行驶排放,采用外部电源向PEMS提供电能,其中排气流量计与排气管相连接固定在车辆尾部,GPS和气象站固定在车顶;车载尾气分析仪SEMTECH-DS与电池组固定在后座.排气通过流量计后方的两个取样口送入分析仪中,记录数据并存储于数据卡,具体布置如图1所示.被测车辆为国Ⅵ 轻型汽油车,后处理形式为GPF/TWC,采用直喷的供油方式,其他参数:整备质量为1 850 kg、发动机最大功率为180 kW、排量为1.5 L.
参照《轻型汽车污染物排放限值及测量方法(中国第六阶段)》发布稿[11],RDE试验持续90~120 min,试验工况包括市区、市郊和高速路段,其中市郊路况可以短暂出现市区路况,高速路况可以短暂出现市区和市郊路况,具体参数见表1.
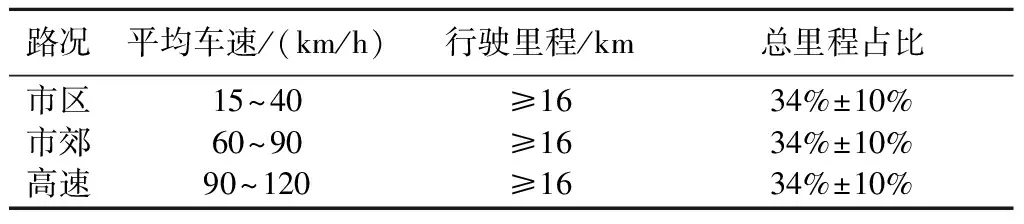
表1 试验工况属性
1.2 RDE试验基本流程
按照1.1将PEMS安装到试验车辆上,接通电源待预热完毕以后,对设备进行泄漏检查,对于气体分析仪采用两点标定,即用零气和量距气进行零点和量距标定.
测试设备在发动机第一次起动前开始记录数据,整个过程不间断记录污染物浓度、车辆位置、环境条件等,按照规定试验工况驾驶车辆,达到要求停止记录.分析仪长时间使用后会出现漂移误差,停止记录数据后检查设备的漂移情况,确保试验数据的准确性,检查方法与标定设备方法相同.
2 建立排放预测模型
2.1 试验数据前处理
由于测试模块之间的响应时间不同,对数据进行时序校准[12],具体步骤如下:GPS和气象站通过车速与Silver Scan-Tool模块对正;Silver Scan-Tool模块和气体分析仪通过发动机转速和CO2浓度对正;气体分析仪和尾气流量计通过CO2浓度和排气流量对正,如图2所示.
除去车辆冷起动、车速为零及发动机熄火期间的数据,在余下数据中选出3 000组样本数据,为了提高所建立模型的泛化能力[13],保证训练样本占绝大部分,将3 000组样本数据随机分成三部分:训练样本占80%、验证样本占15%、预测样本占5%.
2.2 主成分提取
为避免输入量过多,导致预测时间变长且精度降低,选取与影响排放较为明显的变量作为代入参数,同时考虑出现影响因素较多的情况,利用主成分分析进行降维,来作为预测模型的输入[14].车速V和加速度A对排放有很明显的影响,而发动机转速R及负荷率ES是改变车速和加速度的原因.排气温度T会对催化剂活性造成影响,从而影响排放,同时燃油消耗率B及排气流量F会对排放造成影响,故选择以上7个变量作为代入参数.
首先对7个参数进行标准化处理,使每个变量经处理后平均值为0,标准差为1,处理后的参数值为
(1)
式中:Xi为初始参数;E(Xi)为初始参数平均值;D(Xi)为初始参数标准差.
再对7个处理后的特征参数进行因子分析,计算得到特征参数之间的相关系数,并继续求解相关系数矩阵的特征值,按照由大到小的顺序排列,计算每个特征值的方差贡献率为
(2)
式中:λi为特征值.该矩阵共有7个特征值,求解结果如表2所示.
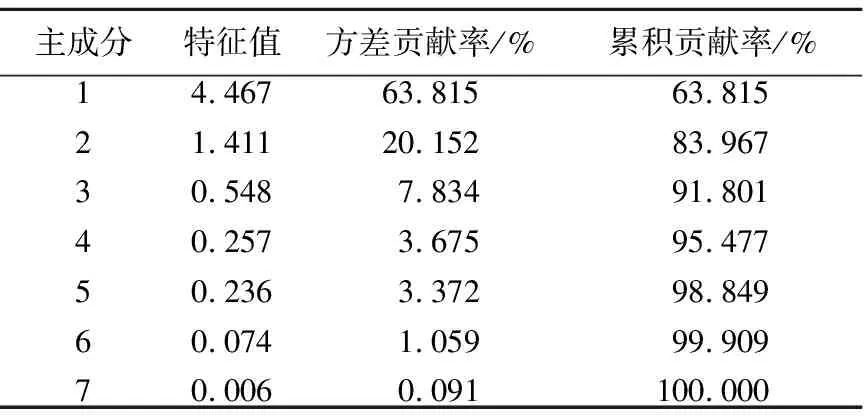
表2 主成分提取方差贡献率
一般来说,主成分分析要求提取的主成分方差累积贡献率达到80%以上才算合理有效.由表2可知,第3个特征值下方累积贡献率为91.801%,第4个特征值下方累积贡献率为95.477%,已经能够代表7个特征参数的绝大部分信息,即本次主成分分析共提取4个主成分,成分矩阵见表3.
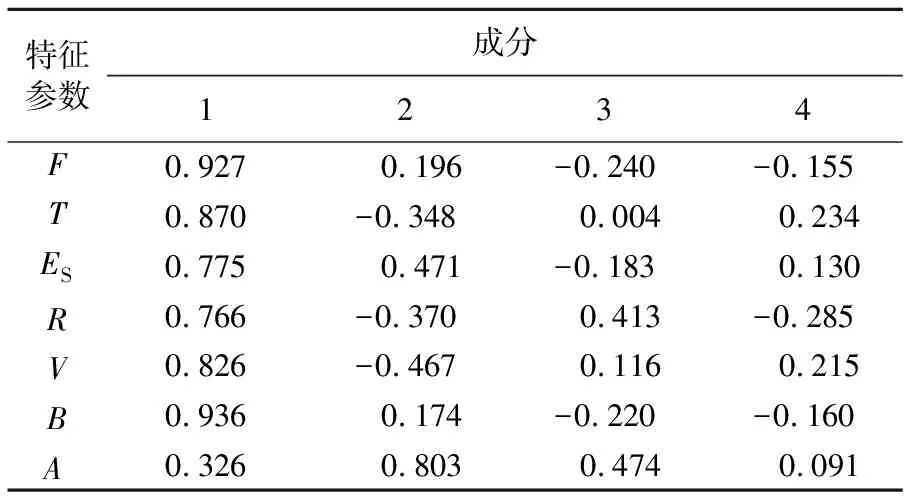
表3 成分矩阵表
由表3中数据可得到主成分特征向量为
F1=0.927Y1+0.87Y2+0.775Y3+0.766Y4+0.826Y5+0.936Y6+0.326Y7
F2=0.196Y1-0.348Y2+0.471Y3-0.37Y4-0.467Y5+0.174Y6+0.803Y7
F3=-0.24Y1+0.004Y2-0.183Y3+0.413Y4+0.116Y5-0.22Y6+0.474Y7
F4=-0.155Y1+0.234Y2+0.13Y3-0.285Y4+0.215Y5-0.16Y6+0.091Y7
表达式中F1~F4为主成分特征向量,将作为BP神经网络的输入信号;Y1~Y7为标准化处理后的特征参数.
2.3 神经网络架构选择
图3为典型三层BP神经网络架构,由输入层、隐含层、输出层组成.
其中:X=(x1,x2…,xn)T为输入层;Y=(y1,y2…,ym)T为隐含层,其层数根据实际问题需要来确定;Z=(z1,z2…,zt)T为输出层;V、M为各层之间的权值.
2.3.1 输入层及输出层确定
选取了车速V、加速度A等7个参数作为污染物排放影响因素,并对这些参数进行了主成分分析,得到4个主成分F1、F2、F3、F4,作为神经网络的输入层.对于输出层,本文对排放物进行预测,根据RDE相关法规,选择CO和NOx排放量作为输出.因此排放模型可简化为
(CO、NOx)=δ(F1、F2、F3、F4)
(3)
式中:δ为输入层到输出层的映射,与各层神经元之间的权重相关.
2.3.2 隐含层层数及节点数确定
理论上多隐含层神经网络非常适合于非线性系统的建模及控制,增加隐含层可以降低网络误差,但会使网络复杂化,增加网络训练时间和出现“过拟合”的倾向.本文选择双隐含层的神经结构,保证一定的泛化能力前提下减少训练时间.
隐含层节点数越多,网络易出现训练过度现象,泛化能力较差;节点数越少,网络不能很好的学习,达不到期望的预测值.根据相关研究[15],对于第2隐含层,其节点数等于输出层节点数时,模型预测性较好.使用经验公式(1)、公式(2)与Kolmogorov公式(3)来确定第1隐含层节点数,并通过训练结果对比来确定最佳节点数.
(4)
(5)
Nhid=2Nin+1
(6)
式中:Nhid为第1隐含层节点数;Nin为输入节点数;Nout为输出节点数;α为1~10之间的调节常数.
选择部分排放数据对神经网络进行训练,结果如图4所示.
可以看出,隐含节点数为10时其训练误差最小.结合以上讨论,确定模型使用的BP神经网络架构为4-10-2-2.
2.3.3 模型传递函数选择
对于双隐含层BP架构,从输入层到输出层,共有3个传递函数.通过多次模拟结果对比,对输入层到第1隐含层选用logsim传递函数;第1隐含层到第2隐含层,以及第2隐含层到输出层选用purelin线性传递函数.
2.4 基于IPSO算法的BP模型
2.4.1 PSO算法及参数设置
标准PSO数学形式描述如下,每个粒子用xi=(pi,vi)表示,i=1,2,…,N:
1)时刻t=1,随机生成N个粒子,x(t)=(x1(t),x2(t),…,xN(t))计算粒子到目前为止经历的最优位置,记为粒子最佳位置pbest(t);全局最优位置记为gbest(t).
2)时刻t=t+1,有
vid(t)=ωvid(t-1)+
c1r1[pbestid(t-1)-pid(t-1)]+
c2r2[gbestd(t-1)-pid(t-1)]
(7)
pid(t)=pid(t-1)+vid(t)
(8)
式中:vid(t)为t时刻粒子速度;pid(t)为t时刻粒子位置;ω为惯性权重;c1,c2为学习因子;r1,r2为0~1之间的随机数.
按式(7)及式(8)迭代粒子速度及位置,得到新的x(t).
3)如达到终止条件,结束搜寻过程,输出gbest(t),否则转入上一步.
对于主要参数的设置,其中惯性权重为
(9)
式中:ωmax、ωmin为惯性权重最大值和最小值;fmin、fmean为当前群体目标函数最小值和平均值.
研究表明:c1、c2取值之和接近4时,算法表现出更好的性能,这里均取值为2;粒子数量定为40;极限速度vmax取1.
2.4.2 PSO算法改进
对PSO算法存在的两点问题[16],进行了改进,改进后的PSO称为改进粒子群算法.
1)学习因子定为常数,在迭代的过程中寻优能力会逐渐降低,学习因子应在优化过程中随时间而变化,保证c1前期较大、c2后期较大的变化规律,计算方式改进为
(10)
(11)
式中:c1,fir为初始学习因子,此处取2.5;c1,end为停止寻优值,取0.5;c2,fir为初始学习因子,此处取0.5;c2,end为停止寻优值,取2.5;tmax为最大迭代次数,取100.
2)惯性权重会随着迭代而衰减,为保证正常的收敛速度,惯性权重应保持非线性衰减,使粒子速度降低较慢,计算方式改进为
ω=ωmax-(ωmax-ωmin)×
(12)
2.4.3 IPSO-BP模型建立
粒子位置和速度是一个a维向量,由BP神经网络中的阈值和权值组成.适应度函数由训练误差组成,在每一次迭代中,粒子映射到网络中去,通过训练误差确定适应度值,即
(13)
式中:f为适应度;f(xi)为网络理论输出;φi为网络实际输出;n为网格数量.
建立IPSO-BP预测模型,其参数为:粒子数量,40;终止迭代次数,100;初始学习因子c1、c2取值均为2;惯性权重ωmax、ωmin分别取0.8、0.4;极限速度vmax取1.
算法流程如图5所示.
3 模型预测结果分析
通过建立的IPSO-BP排放预测模型,将整理的试验数据按照前文要求进行分组,对模型进行训练、验证及预测,其中有150个预测样本,CO和NOx排放预测结果见图6和图7.
由图6和图7可知,在排放峰值附近,由于运行工况急剧变化及模型本身响应时间的限制,其预测值与试验值有一定的偏差,但从整体的排放趋势来看,可以认为预测结果能够较好的与试验值相吻合,其平均相对误差分别为10.58%和13.76%.所建立的IPSO-BP排放预测模型能够对轻型汽油车瞬时排放实现精度较高的预测.此外计算CO和NOx排放因子来衡量预测模型的总体排放误差,分别计算了市区、市郊和高速路的排放因子,并对结果进行加权,CO和NOx排放对比结果如表4所示.

表4 排放因子预测误差
可以看到,CO和NOx总排放因子平均相对误差分别为4.81%和6.4%,且预测值均小于试验值,是由于在排放波峰附近,发动机运行工况急剧变化,导致模型预测值要小于试验值,从而造成了这种误差.计算表明,误差大小都在可以接受的范围内,所建立的预测模型对轻型汽油车整体排放水平有较好预测性.
4 结论
1)对PSO算法提出了改进方法,保证学习因子在优化过程中随时间而变化;惯性权重应保持非线性衰减,使粒子速度降低较慢;改进后的算法表现出更好的性能.
2)基于IPSO-BP神经网络,结合RDE试验排放数据,利用主成分分析法对7个代入参数进行了降维,并以CO和NOx排放为输出,建立了某轻型汽油车的排放预测模型,对CO和NOx排放预测相对误差分别为10.58%和13.76%.
3)所建预测模型同样适用于车辆整体排放预测,CO和NOx排放因子平均相对误差分别为4.81%和6.4%.
猜你喜欢
汽车实用技术(2022年12期)2022-07-05 11:24:06
电子制作(2019年19期)2019-11-23 08:42:00
测控技术(2018年10期)2018-11-25 09:35:54
浙江工业大学学报(2017年5期)2018-01-22 02:03:46
北京汽车(2017年5期)2017-11-08 10:39:53
汽车纵横(2017年3期)2017-03-18 23:15:47
重型机械(2016年1期)2016-03-01 03:42:04
大连工业大学学报(2015年4期)2015-12-11 04:06:52
海军航空大学学报(2015年4期)2015-02-27 13:45:47
汽车维护与修理(2014年10期)2014-02-28 12:14:57