
子阵数字化双频相控阵波束指向分析
2021-01-22 05:21崔卫东
火控雷达技术 2020年4期
崔卫东 肖 晶 马 凯
(陕西黄河集团设计研究所 西安 710043)
0 引言
大型有源相控阵天线通常采用子阵结构,将阵面划分为若干个子阵[1-2],每个子阵输出进行数字化,多路数字化信号送到信号处理系统,经过ADBF后[3],配合雷达实现目标的探测和跟踪。
波控系统控制天线单元级移相器移相,使天线波束指向给定的方向。在子阵级信号处理中,还需要进行数字域扫描,对天线波束指向进行调整,实现同时多波束。子阵规模越大,数字域扫描能力越强[4]。
目前,随着电子信息技术的发展,战场环境的复杂化,雷达的电磁环境越来越恶劣,干扰与反干扰愈演愈烈。为提升雷达的抗干扰能力,需要相控阵天线同时接收多个频率的信号,并在子阵级将不同频率的信号分解开,这就必须解决由于频率偏差引起的指向偏移问题。
1 频率变化引起的指向偏移
一般的频率变化引起的指向偏移由式(1)[5]表示
(1)
Δf是频率变化量,f0是中心频率,Δθf表示信号频率由f0变为f0+Δf后所引起的天线波束指向偏移。
当空间来波信号存在两个频率f1、f2,天线波控系统在单元级按照中心频率f0控制相位。则两个频点实际的波束指向θB1、θB2和需要的波束指向θ0之间的关系为
(2)
(3)
频率f1、f2信号的指向偏移为
(4)
(5)
由式(4)、式(5)得到的指向偏移比式(1)的计算结果更准确,特别是在扫描角较大时,式(1)与实际指向相比差异更大。
2 子阵数字域扫描波束指向
一般情况下,天线波控系统控制波束指向到给定的方向后,在后端数字信号处理中,再在子阵级数字域进行扫描[6],形成同时多波束。以线阵为例进行分析。
若阵列划分为Q个子阵,每个子阵N个单元,全阵共有M=Q×N个单元,单元间距为d,工作波长λ,天线方向图为
(6)
其中,Im为每个单元的激励电流,考虑均匀分布,则所有单元的Im均相等,可忽略。θ0是天线单元级波束指向。由于
m=0,1,2,…M-1=0,1,…N-1,N,N+1,…2N,…QN-1
(7)
则式(6)改写为
(8)
式(8)中的后一部分可看做子阵的方向图
(9)
在数字域进行扫描时,假如需要扫描的偏离角度为θ1,则天线方向图可表示为
(10)
相邻子阵的相位差为
(11)
φB=0时θ的值θB就是天线的实际波束指向,即
sinθB=sinθ0+sinθ1
(12)
从式(12)可以看出,在数字域扫描时,天线最终的波束指向与单元级控制扫描角、数字域扫描角是正弦相加的关系。这样,在数字域实际偏离扫描角的角度
θs=asin(sinθ0+sinθ1)-θ0
(13)
当单元级扫描角度很小,即sinθ0近似为0时,θs近似等于θ1,当单元级扫描角较大时,θs与θ1就存在较大差异,即实际的角度偏移与需要的偏移之间存在较大的误差,用上述方式在数字域扫描存在一定的误差,有必要对其进行修正。根据式(12),得到
sinθ1=sinθB-sinθ0
(14)
代入公式(10),天线方向图变为
(15)
即在数字域控制时,子阵间的相位差变为
(16)
此时,实际指向θB就是需要的波束指向。
当然,也可以对单元级的波控相位进行变化,即不考虑子阵间的相位差,每一个单元的控制相位只按照子阵内部的相对关系进行计算,即式(8)变为
(17)
此时,每个子阵波束指向都为θ0,但是由于存在子阵间相位差,全阵直接合成的方向图不是一个波束。这些子阵信号经过数字化后在数字域合成,控制数字域波束指向偏离角度为θ1,天线方向图为
(18)
此时,在数字域实际的波束指向偏离角就是给定的角度θ1。
3 双频数字域波束指向的修正
对于双频工作的雷达系统[7],空间包含两个频率f1、f2的信号,其来波方向为θ0,在单元级波控系统按照中心频率f0控制相位,两个频点的波束指向由式(2)、式(3)确定,在数字域,需要对两个频点的波束指向进行修正,使其依然指向θ0。
同样以上节的线阵为例,单元级控制后,频率f1的方向图可表示为
(19)
式(19)后一部分是子阵方向图e1(θ)。
根据式(2)、式(14)、式(15)在数字域修正,每个相邻子阵的相位差为
(20)
天线方向图变为
(21)
修正后的天线波束指向就为θ0。同样,对频率f2的信号在数字域进行修正,也可将其波束指向调整到θ0方向。
对二维平面相控阵天线,根据上述过程,可很容易得到其数字域修正的波束。
4 模拟仿真

(22)
其中,A、B分别为正弦空间坐标的方位角和俯仰角。Xq、Yp分别为第(q,p)个单元的位置坐标。在数字域进行修正后,得到的方向图为
(23)
同理,也得到频率f2的方向图。
图1,图2分别是频率f1的平面阵列在方位与俯仰的方向图。俯仰面要求扫描到35°,由于频率偏差,在射频域的波束指向为36.84°,子阵数字化后在信号处理中进行指向修正,修正后的波束指向为35.03°,弥补了频率偏差引起的指向偏移。但是,由于子阵规模的限制,数字域修正后的方向图副瓣抬高。缩小每个子阵的尺寸,可以降低修正后的方向图副瓣,但同时会增加子阵数量。同样,方位面的方向图也修正回了45°,小数点后两位的偏差主要是计算误差引起的。

图1 频率f1射频域&数字域俯仰方向图
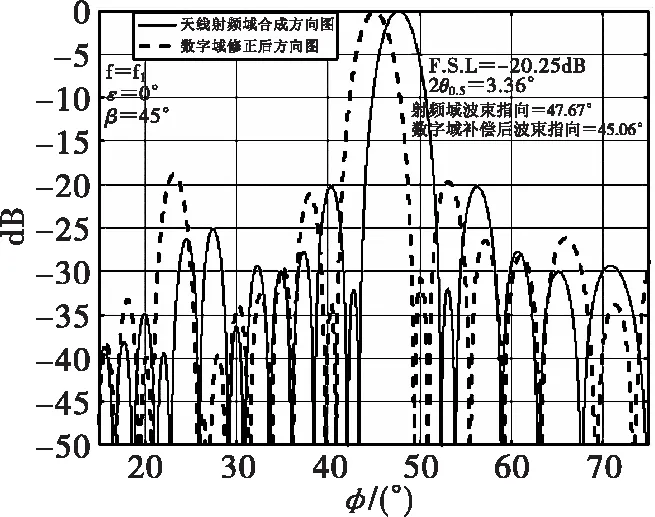
图2 频率f1射频域&数字域方位方向图
图3,图4分别是频率f2的平面阵列在方位与俯仰的方向图。由于频率大于中心频率,指向偏小,同样利用修正公式,在数字域可将波束指向调整到需要的方向。

图3 频率f2射频域&数字域俯仰方向图
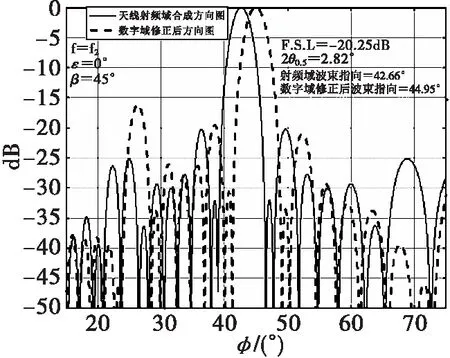
图4 频率f2射频域&数字域方位方向图
5 结束语
子阵数字化双频相控阵天线在雷达领域有着越来越重要的应用,在单元级波控系统只能控制单频点相位,由于频率偏差,引起了天线波束指向的变化,本文分析了波束指向变化的原因,给出了在数字域修正的具体公式,这对双频相控阵天线的工程设计具有重要意义。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
快乐语文(2021年35期)2022-01-18
中学生数理化(高中版.高考数学)(2021年10期)2021-12-02
舰船电子对抗(2021年2期)2021-06-16
移动通信(2020年9期)2020-11-06
现代电子技术(2020年3期)2020-08-04
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
旅游纵览(2015年8期)2015-09-25
