
基于SPO的空地协同运行模式设计
2021-01-21 13:58:34张同荣魏志强时统宇
中国民航大学学报 2020年6期
张同荣,魏志强,时统宇
(中国民航大学空中交通管理学院,天津 300300)
一些小型私人和军用飞机是由1 名飞行员驾驶的,根据国际民航组织(ICAO)和中国民用航空局(CAAC)的要求,大型飞机商业运输至少需要两名飞行员。随着航空业不断发展,飞机维护和燃油成本在运行成本中占比逐步下降,但机组人员成本占比则逐步提高,对航空公司运行经济性的影响越来越大。为控制机组人员成本,航空制造企业不断探索依靠先进机载自动化设备和地面运行模式来实现单人制机组运行(SPO,single pilot operation)或无人驾驶运行模式。
美国国家航空航天局(NASA)在其航空安全计划项目中开展了商业运输航空SPO 模式研究[1],并制定了一系列关键研究问题,以研究从双人驾驶过渡到单人驾驶的可行性。欧盟第七框架计划中的先进驾驶舱项目(ACROSS,advanced cockpit for reduction of stress and workload)也对SPO 模式进行了相关研究[2],以确保SPO 模式下飞行员工作负荷及驾驶压力不高于当前双人制机组模式。美国联邦航空管理局(FAA)在其业界训练标准(FITS,FAA industry training standards)计划中对单人驾驶资源管理[3](SRM,single-pilot crew resource management)进行了相关研究,以确保飞行员能合理地利用机载自动化设备及地面组织机构的支持。在航空器制造商方面,波音公司拟在下一代客机上采用单人驾驶;空中客车公司一直在推动AI 和机器学习技术的发展,以应对民用大型飞机单人驾驶甚至无人驾驶飞机的可能。在推进SPO 实施的研究中,Stanton 等[4]使用认知工作分析法对双人制机组工作进行认知分析,并对单飞行员的操作进行建模,推动公众对单人制机组的接受。Huddlestone 等[5]结合使用操作事件序列图和工作域分析技术,确定驾驶任务分配和需求,阐述了可由自动化设备代替的部分驾驶工作。Stimpson等[6]针对不同驾驶场景及地面协助情况,对单飞行员的工作负荷进行了评估。Liu 等[7]基于自适应知识的设备功能,提出了人机认知界面(CPAI,cognitive pilot-air craft interface),协助1 名飞行员独自完成现代商业运输飞行中的关键任务。文献[8-9]将双人制机组飞行员分隔,研究空间分离对机组人员互动的影响,分析驾驶舱内减少1 名飞行员后的突出问题。Daniela 等[10]研究了单人制驾驶模式下,飞行员在不同飞行阶段的疲劳状况并提出了相应的缓解策略。考虑到驾驶员失能的情况,文献[11-12]对飞行员与地面支持机构间的沟通与决策进行分析,提出建立地面控制站。Bilimoria 等[13]分析了SPO 运行的场景及地面支持要求。以上研究主要集中在驾驶舱任务及认知负荷、人机交互方式、人因关系以及驾驶舱资源管理方面,对空地协同运行模式及地面支持方式等方面还未进行深入研究。
中国针对SPO 模式的研究刚刚起步。王淼等[14]基于主要飞行过程,研究了SPO 模式下的飞行驾驶与操控演示验证技术。张炯等[15]对单人驾驶模式进行了设计及测试,研究不同测试环境下机上飞行员的感官差异。随着中国劳动力成本持续上涨,在商业航空运输方面,迫切需要开展SPO 自动驾驶、自主飞行、人机交互、协同支持、超控干预等运行技术和运行模式的研究,以降低人力成本,提高飞行安全。
基于SPO 对安全冗余的要求,针对航空公司地面运行控制工作提出的新要求,分析了驾驶舱人制变化历程,构建出SPO 运行的典型场景,进行空地协同运行模式设计,对地面运行支持职能及关键岗位的职责进行了重新设计,指出SPO 需解决的关键技术,为构建新一代客机SPO 空地协同运行模式提供参考。
1 单人驾驶舱的典型场景分析
1.1 驾驶舱人制变化历程
飞机最早是单人制单座机,其飞行事故概率远高于后期的多座机。因此,多人驾驶飞机成为保证飞行安全的重要手段。20世纪50年代,大型飞机驾驶舱通常包括机长、副驾驶、机械员、通讯员和领航员5 名机组成员。随着航空通信、导航设备以及航空发动机和监控设备不断进步,通讯员、领航员和机械员逐渐退出,驾驶舱演变为双人制机组模式。在先进机载设备和双人驾驶舱功能布局条件下,双人驾驶模式形成了新的操作程序及机组资源管理模式,不仅提高了飞行安全性,降低了机组工作负荷,而且降低了机组人员成本,提高了经济效益。
波音公司准备在无人驾驶客机技术实用化之前,推出SPO 模式,作为无人驾驶的衔接和过渡。在SPO模式下,可能会出现飞行员需要地面操作人员帮助和配合,以解决复杂问题的情况。另外还存在飞行员失能的问题,这需要地面支持人员远程操控先进驾驶舱智能自动化设备来解决。
1.2 单人驾驶舱的典型运行条件
SPO 运行方案(ConOps,concept of operations)是SPO模式下空地协同运行模式的重要基础。一般而言,SPO ConOps 不仅包括其组成结构及特征,还应在现实背景下对其整体综合特征进行表述。SPO 由人和先进的智能驾驶舱自动化设备共同驾驶和操控飞机,即“人机共驾”,这里的“人”不仅是指飞行员,还包括地面飞行管理/控制(GFMC,ground flight management or control)人员。因此,SPO ConOps 涵盖人与自动化设备两方面的角色和责任,以及“人-人”、“人-机”的交互运行程序。“人”和“机”的角色、职责、程序特征及分配将部分取决于运行条件,包括飞行员状态和飞行条件。基于此,可将SPO 的运行条件划分为4 个基本类别,如图1所示。

图1 SPO 运行条件分类Fig.1 SPO operating condition classification
对于运行条件1,在常规飞行条件下,飞行员状态正常,飞机进入自动驾驶状态,飞行员行使机长职责,对飞行进行监控,必要时输入控制命令,由驾驶舱自动化设备执行,这种情况不需要地面运行人员提供一对一协助,地面可提供一对多的信息支持(传统签派职责)。对于运行条件2,飞行条件变复杂,驾驶舱自动化设备可能需要机长干预操作。如果干预工作负荷较高,机长可请求地面支持人员提供一对一驾驶支持。在运行条件3 情况下,飞行员状态受到限制(甚至失能),这时需要地面支持人员替代飞行员并履行机长职责,监控驾驶舱自动化设备的操作,保障飞行安全。运行条件4 比条件3 更加恶劣,飞行员状态受限,且飞行条件复杂。驾驶舱自动化设备执行控制命令,但需要人工干预,此时地面支持人员可能需要专业飞行人员(如不执行飞行任务的飞行员)行使机长职责,远程干预控制飞机,并就近着陆。
在SPO 空地协同运行模式下,如果飞行员失能,则需要宣布紧急情况并由空管为该飞机提供空域安全服务,由地面支持人员与智能自动化设备交互工作来操控飞机就近着陆。SPO 空地协同运行模式的实施,需要足够的安全可信度及冗余性,这也是其运行实施中最重要的成本。
2 空地协同运行模式研究
2.1 模式设计及职责分析
实施SPO 空地协同运行模式所面临的重要挑战就是需要取得与传统双人制机组同等的安全可信度及运行效率。商业运输航班从双人制机组转变为单人制机组运行时,应当仔细研究双人制机组的运行方式和工作程序,这也是SPO 空地协同运行模式进行设计研究的基础环节。
2.1.1 模式设计
双人制机组运行模式中,1 名飞行员操控飞机,被称为PF(pilot flying);另1 名飞行员协助配合并与管制员对话,行使飞行状态监控职责,被称为PNF(pilot non-flying)或PM(pilot monitoring)。在SPO 空地协同运行模式中,PNF 的任务则由驾驶舱智能自动化设备和地面人员代替,可考虑建立地面控制中心(GCC,ground control center),设置驾驶支持职位或将签派员职责进一步扩大转变为地面飞行管理/控制人员,时刻监控飞行状态,为飞行员提供帮助甚至能替代飞行员操控飞机安全着陆。SPO 空地协同运行模式将由机长、副驾驶、运行控制中心(AOC,airline operations center)及机载自动化设备等组成的运行团队,过渡为由机长、地面控制中心及先进的智能信息控制共享平台组成的运行团队,如图2~3 所示。
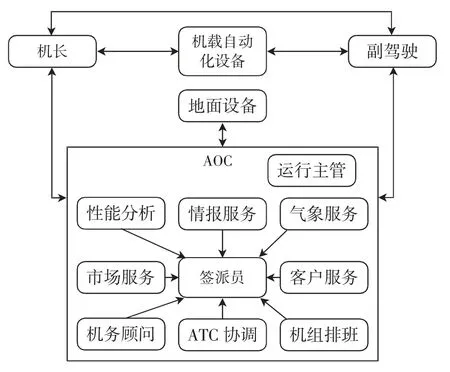
图2 传统运行模式Fig.2 Traditional operation mode
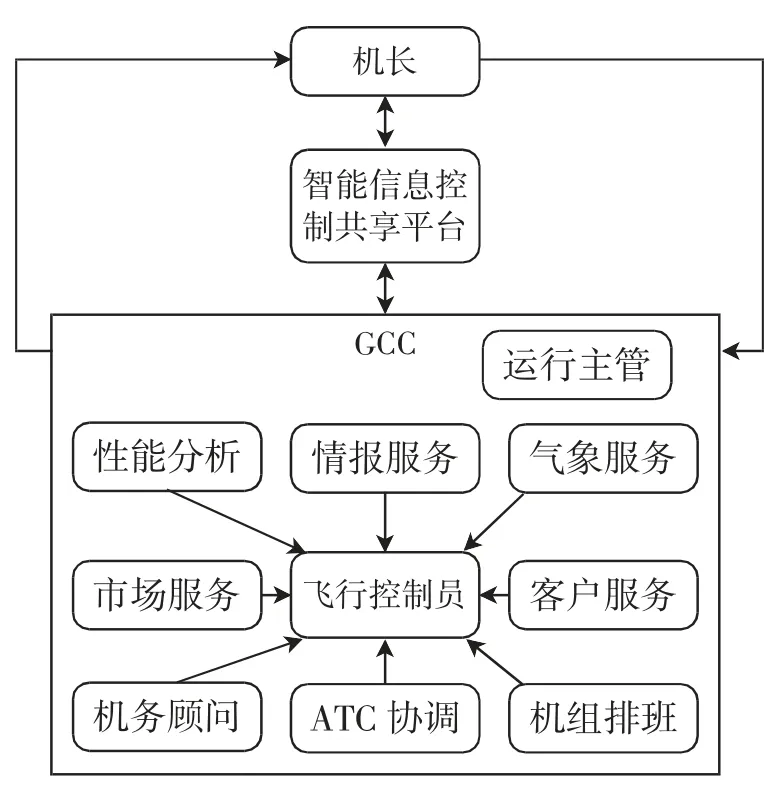
图3 SPO 模式Fig.3 SPO mode
SPO 空地协同运行模式下,由于机上只有1 名飞行员,从职责上来说,即认定该飞行员为机长。机长和地面飞行管理/控制人员协同工作,并与驾驶舱自动化设备和智能信息控制共享平台进行交互,以保持飞行的安全和效率。
目前在双人制驾驶舱中执行的一些简单功能,如阅读清单、交叉检查等,可作为分配给驾驶舱自动化设备的首选任务清单。考虑到当前自动化设备的复杂性和可靠性,对于高度复杂的功能,如非正常及特殊飞行状况下的操作或程序选项,更适合飞行员操作。其他功能可由飞行员在自动化设备辅助下完成。SPO空地协同运行模式不会要求每个地面飞行管理/控制人员需要全部执行传统签派职能及驾驶支持职能(该功能可能需要专业的飞行知识和技能),但地面飞行管理/控制人员团队将会共同履行以下3 项核心职能:①传统的签派职责;②为多架正常状态的飞机提供分散式驾驶支持;③对某一特殊状态的飞机提供一对一驾驶支持。
2.1.2 职责分析
传统的签派职责是由航空公司在地面设置AOC,对飞行进行组织与保障。AOC 以签派员为中心,由空中交通管制(ATC,air traffic control)协调员、机务顾问、机组排班、气象服务专家以及客户服务等为飞行安全提供全面的服务,如图2所示。目前,每个签派员大约可同时服务20 架飞机。应当强调的是,根据各国的民航规章,签派员与机长共同对航班安全运行负责。
分散式驾驶支持职能指的是基本、例行的驾驶支持任务,如阅读检查单、进行交叉检查、诊断飞机设备警告灯等。1 个地面飞行管理/控制人员可向多架飞机提供这样的飞行支持服务。但是,该功能仅适用于飞行状态正常的飞机,即SPO 运行分类条件1 的情况。
专用驾驶支持职能是指机长在高负荷工作情况下或面对特殊飞行条件,需要地面提供持续性一对一的驾驶支持服务,即SPO 运行分类条件2 的情况,如发动机着火、客舱失压等。此外,专用驾驶支持职能也适用于机长状态受限或失能情况下由地面飞行管理/控制人员接管来操纵飞机,即SPO 运行分类条件3 和4的情况。与专用驾驶支持职能相关联的功能应包括远程操控飞机飞行管理系统(FMS,flight management system)修改飞行路线,或远程操控飞机飞行方式控制面板输入相关自动驾驶仪指令,如速度、高度、航向指令等。因此,执行专用驾驶支持职能所需的技能与传统飞行员基本类似。
2.2 地面飞行管理组织的结构分析
对于机长,除非行为受限失去能力,其应当担任责任机长(PIC,pilot-in-command)。机长最主要的任务是风险管理和资源(驾驶舱自动化设备和地面飞行管理/控制人员)管理,做出与飞行有关的所有决定,对飞机具有绝对的控制权,并对飞行安全负有最终责任。
对于地面飞行管理/控制团队,要承担比传统副驾驶和签派员更多的职能。当前,签派员在经过相关培训和提升后,执行分散式驾驶支持职能一般不会出现较大困难,但对于专业驾驶支持职能,其所需的技能和训练要求较高,应当考虑是继续对签派员进行培训和提升,或是设置专职岗位。根据专用驾驶职能的不同实现形式,可确定两种地面支持组织结构,如图4所示。
2.2.1 混合式地面支持组织结构

图4 两种地面支持组织结构Fig.4 Hybrid vs.specialized ground support structure
在该种结构中,每个地面飞行管理/控制人员被称混合式地面飞行控制员(HGO,hybrid ground operator),HGO 都要经过培训和认证,能同时执行3 项核心职能,即传统签派、分散式驾驶支持及专业驾驶支持。每个HGO 通常提供从飞行前计划到飞机驶达登机口的多个航班支持服务。如果其服务的某个航班遇到特殊飞行状况需要专业驾驶支持时,其他航班将在运行主管指导下移交给其他HGO 来处理。在航班移交之后,HGO 为该航班提供一对一的驾驶支持服务,在必要时还可召集AOC 内其他岗位人员提供支持。在处理完特殊飞行状况后,如果移交出去的飞机尚未着陆驶达登机口,则将这些飞机交回给该HGO。
2.2.2 专业化地面支持组织结构
专业化地面支持组织结构设置两种工作岗位:地面合伙人(GA,ground associates)和地面飞行员(GP,ground pilots)。GA 在经过培训和审定后,执行传统签派及飞机常规飞行状态下的分散式驾驶支持服务。GP在经过培训和审定后,执行飞机特殊飞行状态下的专业驾驶支持服务。每个GA 通常提供从飞行前计划到飞机驶达登机口的多架航班分散式支持服务。如果其中1 架航班遇到需专业驾驶支持的特殊飞行状况时,该飞机将在运行主管指挥下移交给指定的GP。在移交之前,GP 可能处于待命状态或正在执行另外一些并行任务,移交时需从GA 获取该飞机特殊状况的移交简报。此后,GP 为特殊状况飞机提供一对一驾驶支持服务,GA 则保持对该飞机的一般态势监控,以便在GP 需要时给予签派支持或AOC 所能提供的其他支持。在特殊飞行状况飞机的问题解决之后,GP 再将该飞机(如果尚未着陆)交回给GA。在这种结构中,GA的数量将会比GP 多。
无论采用何种结构形式,最重要的考虑因素是取得与传统双人制机组同等的安全可信度及运行效率,另外需要考虑的因素就是地面飞行管理/控制团队组织机构的运行成本,因为实行SPO 最重要的内在驱动之一就是降低机组成本,提高经济效益。运行成本中的两个关键成本因子包括:①地面飞行管理/控制人员数量及其培训/资格要求成本;②复杂可靠(因而昂贵)的地面设备数量,如远程控制飞机飞行路径所需的设备。设备的成本是刚性需求,故在考虑地面结构形式时,应主要考虑所需地面飞行管理/控制人员的数量及其培训成本,并通过人机回圈(HITL,human-in-the-loop)实验评估不同组织结构的安全可信度及运行效率。
3 SPO 中的关键技术分析
SPO 空地协同运行模式中,无论使用哪种地面支持结构,都需要地面飞行管理/控制人员使用智能信息控制共享平台来发布高级飞行控制指令和执行专业化驾驶支持职能。与此同时,智能信息控制共享平台还应当包括分散式驾驶的支持设备以及下一代签派设备以减轻飞行管理/控制人员相应的工作负荷。要实现这种高度集成化、空地联合使用的智能信息控制共享平台需要多学科协同攻关,突破一系列关键技术,以期能够达到双人制机组同等的安全水平和效率。
1)空地数据高速互联
在对SPO 典型场景和空地运行模式进行分析后,要实现SPO 地面飞行管理/控制团队的3 个职能,需要空地数据的高速互联互通,建立飞行状态信息共享平台。地面飞行管理/控制人员需要向上传递相关的情报数据供飞行员参考使用;同时,其还能够实时掌握飞机的状态,从飞机向下传递相关数据,监控飞机FMS的相关参数,更好地提供飞行支持服务。
2)远程飞行控制
在SPO 运行分类条件4 情况下,即机长状态受限,飞行条件复杂,地面飞行管理/控制人员需要直接与机载FMS 设备进行信息交互,实现对飞机的远程操控。要实现此功能,最重要的技术就是要对飞机进行远程控制,这与目前无人机设备的要求相类似。此外,分散式驾驶支持功能也需要能够实现多任务远程飞行控制,同时服务多架飞机。
3)智能化“人机共驾”
SPO 空地协同运行模式的重要特点之一就是“人机共驾”,即飞行员与驾驶舱自动化设备协同决策。驾驶舱的自动化设备首先应具备通话管理功能,能实现由副驾驶执行的阅读检查单、进行交叉检查、诊断飞机设备警告灯等功能。这种通话管理不仅需要为驾驶舱自动化设备赋予人性化听觉功能,还需要解决驾驶舱环境噪声、智能语音识别、语音合成等技术。此外,还需适当为机载自动化设备赋予视觉、触觉、推理功能,如建立意图风险识别及告警设备,可要求飞行员输入其飞行意图信息,通过人机交互,由机载自动化设备判定飞行员的飞行操作意图是否会构成飞行状态潜在风险,并根据风险程度提示相应告警。
4)飞行员健康实时监测及告警
监控飞行员的生理和行为状态主要是为了评估飞行员的能力以及发现其错误的操作。在双人制机组驾驶舱中,机组成员之间是相互监测的。SPO 模式下,驾驶舱自动化设备可利用生理传感器监测飞行员生理健康状况,如心率、脉搏等简单的检测或脑电图、功能性近红外光谱等精细化的检测。SPO 空地协同运行模式下客机驾驶舱内只有1 名飞行员,如果缺少监督和制约,飞行有被胁迫或实施航空犯罪的可能。因此,机长行为监测也同样重要,要确保SPO 空地协同运行模式下机长对飞行安全的负责。
4 结语
基于不同飞行条件与飞行员生理行为能力,对SPO 人机共驾运行的典型场景进行分析,构建出不同的空地协同运行模式,并设计出与之相适应的地面飞行管理/运行控制部门组织结构,重构出关键岗位职责,提出应解决的关键技术问题。研究结论如下:
1)SPO 是“驾驶舱机组人制”发展的趋势,可在不降低安全水平的前提下降低航空公司的运行成本,带来显著的经济效益;
2)SPO 不同的地面协同模式对航空公司的运行控制方式提出了新的要求,运行控制体系和岗位职责需要重新设计以适应SPO 的新要求;
3)SPO 的顺利实施需要多学科协同攻关,突破空地数据高速互联、远程飞行控制、智能化“人机共驾”、机长健康实时监测及告警等关键技术。
猜你喜欢
小学科学(学生版)(2021年9期)2021-11-02 05:26:50
小哥白尼(军事科学)(2021年2期)2021-10-12 05:50:32
小学科学(学生版)(2021年8期)2021-08-30 09:16:28
民用飞机设计与研究(2020年4期)2021-01-21 09:15:44
小天使·一年级语数英综合(2020年5期)2020-12-16 02:56:26
人民交通(2019年16期)2019-12-20 07:03:58
绿色中国(2018年11期)2018-11-06 07:16:32
时代英语·高一(2018年4期)2018-09-14 10:53:14
海峡姐妹(2017年11期)2018-01-30 08:57:42
百科探秘·航空航天(2016年9期)2016-12-01 03:04:15
