一种摇臂轮组与行星轮组相结合的爬楼越障机器人结构设计
2021-01-21 06:35张声岚钟学涛甘礼福钟志贤
河南科技大学学报(自然科学版) 2021年3期
张声岚,钟学涛,甘礼福,钟志贤
(桂林理工大学 机械与控制工程学院,广西 桂林 541004)
0 引言
随着机器人控制和人机交互等关键技术的飞速发展,对机器人移动的方式和适应能力有了更高要求,以满足不同环境下机器人作业要求[1]。多地形自适应移动方式能够根据地形特点自适应调整机器人的移动方式,实现机器人高效行走和越障,有效提高机器人的作业能力和效率,具有重要的研究意义和应用价值[2]。
基于足式和履带式结构设计的移动机器人,虽然对复杂地形具有一定的适应性,但存在结构复杂、磨损度高以及控制难度大等特点[3];而基于轮式结构的移动机器人灵活性高、稳定性好、运动控制简单,具有广泛的应用发展前景[4]。当前,许多学者对轮式的多地形自适应行走结构展开了研究,例如文献[5]对六轮全地形移动机器人构建越障动力学模型,分析机器人的越障性能。文献[6]提出行星轮系越障结构,通过定轴和行星轮系之间的转换,实现适应矿产业开采的越障、跨沟和爬坡等工况。文献[7]提出了一种被动摆臂结构的八轮机器人,通过摆臂被动转动适应地形变化,实现单级台阶和崎岖地形中的运动。
上述研究均只对单级垂直台阶或单个障碍物进行适应性分析,并没有对多级连续台阶以及多个连续障碍物进行适应性分析。本文提出了一种自动适应地形变化的摇臂轮组和行星轮组相结合的爬楼越障机器人,通过摇臂轮组被动摇臂运动和行星轮组主动翻转运动自动适应地形变化,实现连续攀爬通过多级连续垂直台阶和多个连续障碍物。并建立机器人仿真模型和物理样机,分析机器人爬楼越障的效率和稳定裕度,验证了机器人的地形适应能力和越障能力。
1 机器人总体方案设计
1.1 机器人需求分析
摇臂轮组与行星轮组相结合的多轮组式爬楼机器人是在移动机器人的基础上进行改进,提高了机器人的灵活性、路面适应性和越障性等性能。本文结合中国楼梯建造标准设计爬楼越障方案。为了满足爬楼机器人的各项性能需求,机器人应满足以下设计要求:路面适应性好,能轻松翻越一般路面障碍;能翻越建筑标准中大部分的楼梯,并且能灵活通过楼道;机器人运行平稳、可靠,能进行全向移动;控制简单,易操作。
基于上述设计要求,本文设计的爬楼机器人应满足以下性能指标。
(I)控制模式:无干扰下,无线遥控器作用范围不小于200 m,基于设计程序与传感器反馈值自动行驶。
(II)运行速度:平地行驶最大速度达3 m/s。
(III)承载能力:包含自身质量,最小承载质量10 kg。
(IV)运动方向:全向移动,包括前后移动、左右横移、斜向运动与原地旋转。
(V)机器人尺寸:总体尺寸控制在1 m3以内。
1.2 机器人方案设计
机器人整体机械结构包括摇臂轮组、行星轮组与底盘,其中,摇臂轮组由摇臂架、摇臂轮与导向装置组成;行星轮组由行星架、行星齿轮组、内外轴传动装置以及行星轮组成,主要用于机器人移动与爬楼越障。采用麦克纳姆(Mecanum)轮作为摇臂轮与行星轮,实现全方位移动,并采用体积小、力矩大且易于控制的直流无刷减速电机作为机器人动力系统。独立悬挂底盘由底板组、附桥与避震系统组成,影响机器人的整体稳定性。
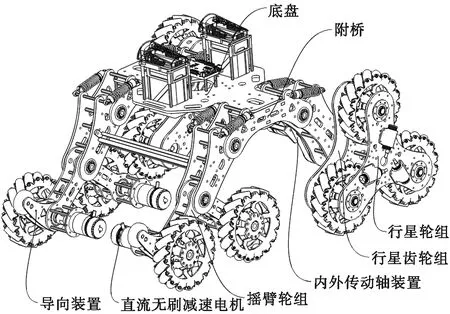
图1 爬楼机器人三维模型图
本文设计的机器人长×宽×高为772 mm×638 mm×415 mm;利用SolidWorks三维软件对模型进行质量计算,自身质量约15 kg,满足设计方案中机器人的尺寸及质量要求。爬楼机器人三维模型图如图1所示。
爬楼机器人整体采用以底盘为中心,轮组两侧对称式分布设计。底盘用于安装机器人控制系统与电源,并作为机器人运载平台。两侧附桥处设计纵向独立悬挂避震系统,缓冲机器人在启动、急停以及与障碍物碰撞时产生的惯性。
机器人通过摇臂轮组的摇臂运动、行星轮组翻转运动以及各驱动轮的旋转运动,实现机器人连续爬楼越障[8]。当机器人在平地运动时,由于摇臂轮组与附桥连接处无驱动,主要通过外力与路面起伏情况做被动摇臂运动,同时行星架翻转驱动电机无动力输出,运动原理与摇臂轮组相同;当机器人在爬楼运动时,摇臂轮组前轮在导向装置的辅助下抬起并爬越楼梯,行星轮组在直流无刷减速电机的驱动力作用下做翻转运动,从而实现连续爬楼[9]。
2 机器人关键部件设计
2.1 关键结构尺寸设计
根据《民用建筑设计统一标准》[10]规定,楼梯踏步高度应小于210 mm,并大于140 mm,楼梯踏步的宽度应采用220 mm、240 mm、260 mm、280 mm、300 mm、320 mm。选择踏步高度a×踏步宽度b为150 mm×300 mm的常见楼梯尺寸,进行爬楼越障机构的驱动轮轴距尺寸、轮子尺寸以及底盘附桥的两端中心距尺寸等关键尺寸设计。
图2为机器人关键尺寸图。为满足机器人连续爬楼越障,两摇臂轮需同时落在楼梯水平面上,以及能跨越楼梯垂直面,摇臂轮间的中间距尺寸c应满足[11]:
c≥a;
(1)
c+r≤b,
(2)
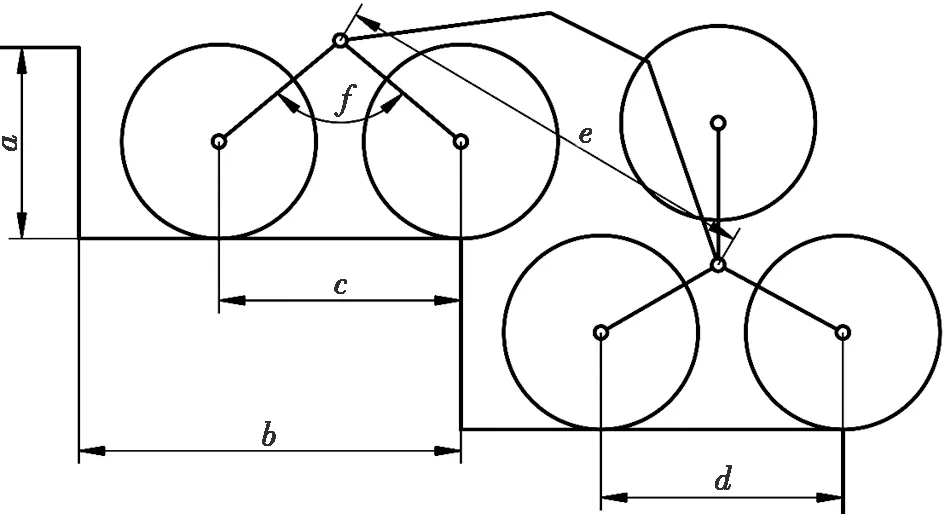
图2 机器人关键尺寸图
其中:a=150 mm;b=300 mm;r为麦克纳姆轮半径,根据常见楼梯的尺寸,设计中选取直径150 mm的麦克纳姆轮作为驱动轮,则r=75 mm。根据式(1)和式(2)得:
150 mm≤c≤225 mm。
(3)
摇臂轮组驱动轮轴距c取靠近中间值,即c=190 mm;行星轮组驱动轮轴距取d=c=190 mm。防止出现受力死角,导致摇臂轮组前轮无法抬起,摇臂架角度f≥90°,并且行星轮采取三轮120°均布,则设计中可取摇臂架角度f=100°。为保证摇臂轮组与行星轮组在运动过程中不发生干涉,底盘附桥与两轮组连接处中心距尺寸e应满足[12]:
(4)
计算得e>340 mm。为使结构设计合理,防止与爬越其他类型的楼梯发生干涉,设计中取e=400 mm。
2.2 摇臂轮组结构设计
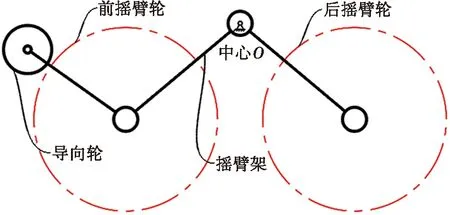
图3 摇臂轮组结构简图
摇臂轮组结构包括摇臂架、驱动轮及导向装置,结构简图如图3所示。摇臂架两端安装麦克纳姆轮作为驱动轮,通过直流无刷减速电机经联轴器驱动。导向装置由导向轮与导向架组成,固定在摇臂轮架前端,摇臂架与导向架主要由碳纤维板和铜柱通过螺栓固定组成。摇臂轮组结构通过销轴固定在附桥前端,与障碍物接触受力,随路面的起伏变化做被动摇臂运动,从而爬越障碍,平稳运行与适应路面环境[13]。
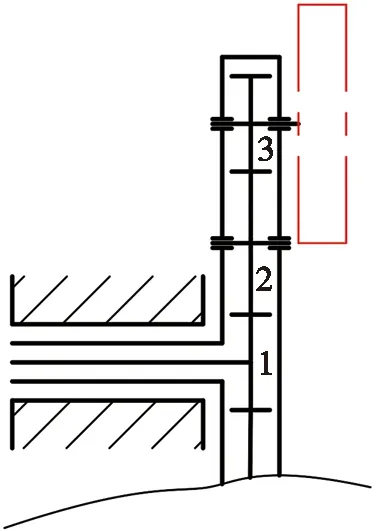
2.3 行星轮组结构设计
行星轮组结构主要由行星架、行星齿轮组、内外轴传动装置以及驱动轮组成,其中,行星齿轮组、内外轴传动装置以及驱动轮固定在行星架上。行星齿轮组结构与齿轮传动示意图如图4所示。为了实现行星轮组翻转与行星轮旋转进行独立运动,其传动系统结构设计内外轴传动,分为内传动轴传动与外传动轴传动。行星轮组传动简图如图4a所示。直流无刷减速电机通过同步带进行一级减速,驱动固定在行星架上的外传动轴,行星轮组翻转。行星轮的旋转由直流无刷减速电机驱动内传动轴末端中心齿轮1,通过固定在行星架上的中间过渡齿轮2,将动力传递到驱动末端的齿轮3,为驱动轮提供3个速度大小与方向一致的旋转运动,行星齿轮传动路径如图4b所示。内外轴传动装置的功能使机器人后轮组实现两个互不干扰的独立运动,为后轮爬升楼梯与障碍提供保障。
2.4 避震系统结构设计
良好的悬挂系统不仅可以抵消路面不平产生的冲击,提高爬楼越障装置的道路适应性和平稳性,同时也可以降低各轮组装配时可能存在的平面度偏差,使需要着地的麦克纳姆轮全部接触地面。设计纵向独立悬挂避震系统结构,将金属液压避震纵向安装在轮组与底盘之间,可以将不平路面激励产生的动能转化为弹簧的弹性势能,起到缓冲作用。金属液压避震固定端与附桥由铰链机构相连接,对麦克纳姆轮的运动轨迹起到导向作用。
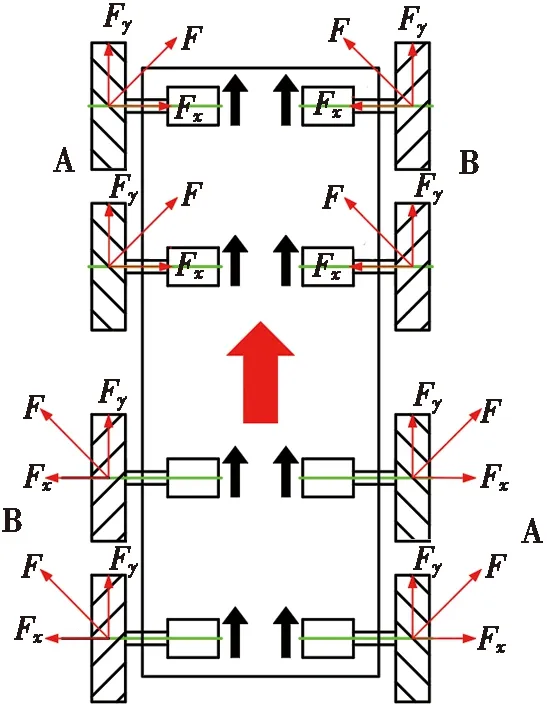
2.5 驱动轮布置方式分析
爬楼机器人的轮组驱动轮设计为麦克纳姆轮,并采用直流无刷减速电机作为动力输入。麦克纳姆轮以其灵活性和多样性,在全向智能移动装备领域得到了广泛的应用[14],麦克纳姆轮在电机的驱动力作用下,会同时产生转动和沿轴向运动的作用力,实现前行、横移、斜行、旋转等多种运动方式[15]。该爬楼机器人的平地运动模式为八轮着地,每个麦克纳姆轮均为主动轮,各轮组落地的麦克纳姆轮转向一致。根据麦克纳姆轮的轮缘滚子分布情况、自身的运动特性以及对各个麦克纳姆轮的受力分析,以ABAB型的分布形式进行布置,各项移动分解示意图如图5所示。如图5a所示,当全部轮子向前转动时,A、B轮组的轴向力Fx被相互抵消,机器人向前移动,后退同理。如图5b所示,当A轮组向前转动、B轮组向后转动时,向前向后的力Fy被抵消,机器人向右移动,向左移动同理。如图5c所示,当A轮组向前转动、B轮组不转时,产生一个斜向右前方的合力F使机器人向右前方移动,其他方向的斜向移动同理。如图5d所示,当右侧轮子向前转动、左侧轮子向后转动时,轮组间向前向后的力Fy被抵消,机器人向右旋转,反之向左旋转。

3 爬楼越障过程及仿真分析
为验证爬楼机器人的爬楼越障性能与运动轨迹的合理性,以及通过仿真结果优化各结构的相关设计参数,对其进行运动仿真分析。图6为机器人爬楼越障过程仿真图。机器人在遇到楼梯时,切换为爬楼运动模式。导向轮最先碰到楼梯竖直面,在驱动轮驱动力以及摩擦力的作用下,摇臂轮组前轮受力抬起做被动摇臂运动,轮子贴着楼梯表面爬升楼梯,如图6a所示。在摇臂轮组爬升至第2阶楼梯时,行星轮组上安装的红外传感器检测到障碍高于星轮半径以及星轮逼近障碍时,行星架做翻转运动且行星轮做旋转运动,行星轮组翻越楼梯,如图6b所示。机器人在连续爬楼过程中,摇臂轮组做被动式摇臂运动,机器人同时有4个驱动轮着地,即一侧两个驱动轮着地,提供足够的驱动力完成连续的爬楼运动,如图6c所示。在摇臂轮组与行星轮组的配合运动下,机器人最终完成整个爬楼过程,如图6d所示。
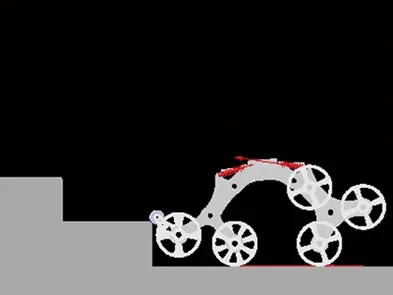
(a) 爬升第1阶楼梯
机器人爬楼过程中,摇臂轮中心、行星轮中心与质心的运动轨迹变化如图7所示,仿真测试得爬越13级踏步高度a×踏步宽度b为150 mm×300 mm的楼梯用时50 s。机器人在爬楼过程中,根据图7a所示,摇臂轮中心运动轨迹变化与楼梯表面形状变化大致相同,表明摇臂轮组紧贴楼梯表面运动,且过程较为平稳。根据图7b可知:行星轮进行4~5次翻转,行星轮组翻转一周爬越3阶楼梯,爬楼效率较高。由图7c可知:质心运动轨迹整体波动形状符合楼梯表面变化趋势,且曲线的变化趋势较为平缓,无大幅度的波动与尖角产生,机器人在爬楼越障过程中无大幅度抖动,整体爬楼过程较为稳定。同时通过设置楼梯级数为13级,测试机器人的适应能力,机器人爬行多种尺寸楼梯试验数据如表1所示。从表1中可以看出:机器人能够适应多种楼梯爬行,且爬行的效率较高。
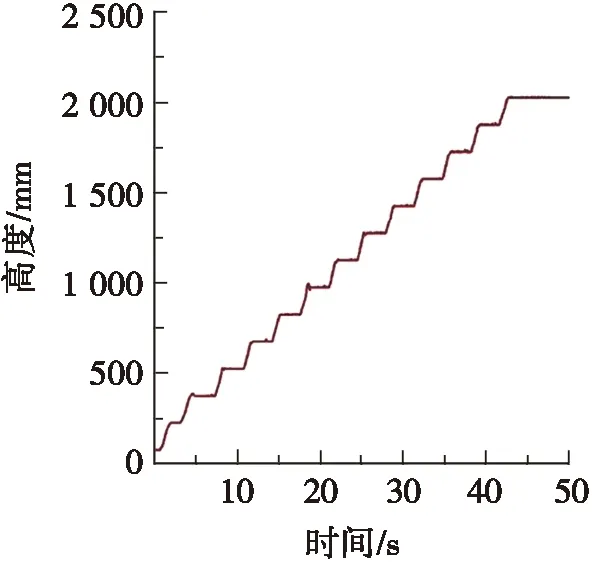
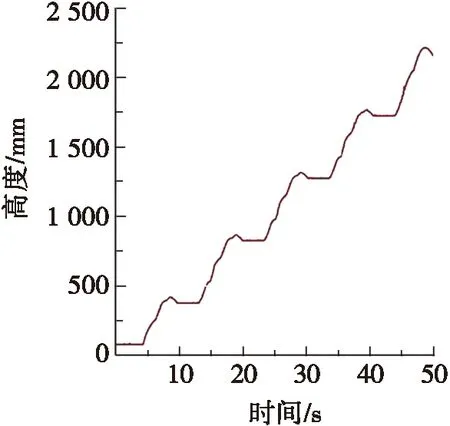
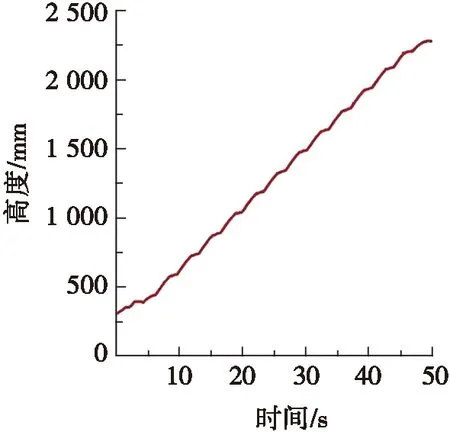
(a) 摇臂轮中心运动轨迹 (b) 行星轮中心运动轨迹 (c) 质心运动轨迹
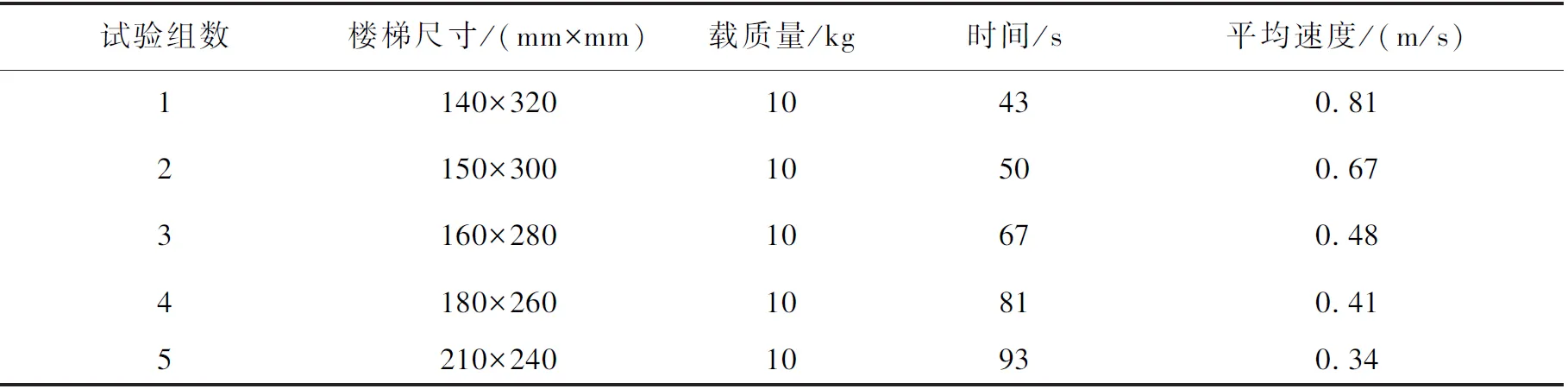
表1 机器人爬楼试验数据
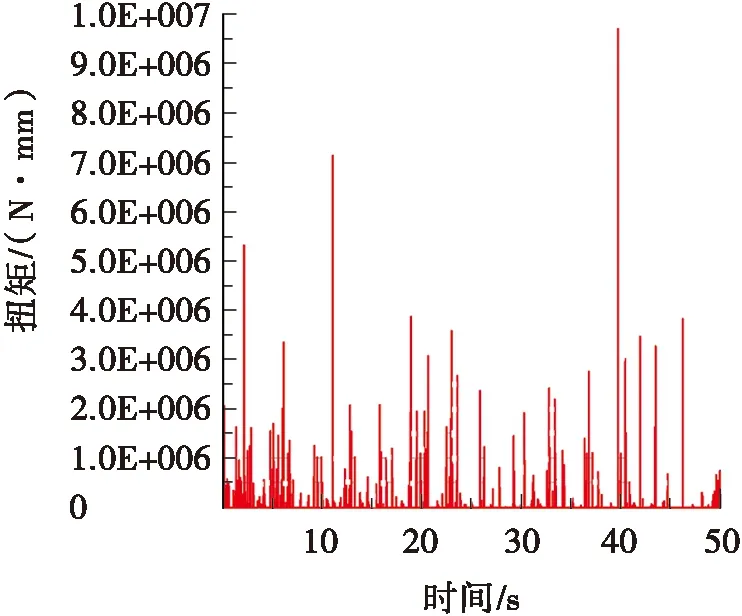
机器人摇臂轮电机转矩的变化如图8所示,4个电机的转矩变化图不一致,且峰值出现在不同时间,这充分验证了摇臂轮接触楼梯竖直面后做摇臂运动是一个自适应过程,不同时间摇臂轮与楼梯接触点的负载实时变化,最终实现摇臂轮组稳定爬越楼梯。
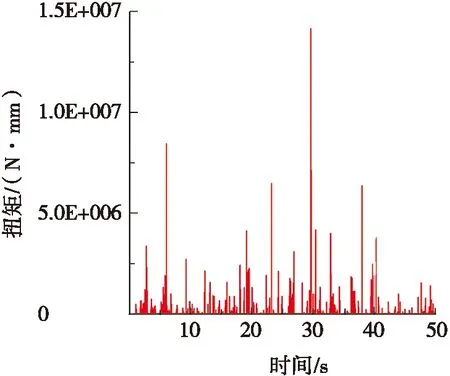
(a) 电机1
(c) 电机3
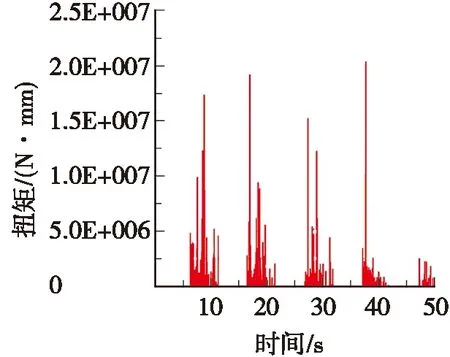
机器人的行星轮由驱动电机驱动内传动轴与齿轮箱至各行星轮,其单侧行星轮电机转矩变化如图9所示。图9a、图9b和图9c的转矩变化较为规律,每个行星轮的转矩变化集中在5个时间范围内,验证了行星轮做行星运动翻越楼梯时,由于每一次落点位置的不同,其所需转矩的大小也不同。
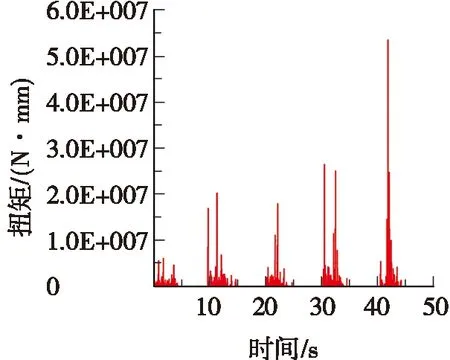
(a) 电机5
(b) 电机6

(c) 电机7
通过分析Adams软件中驱动电机的仿真数据结果,验证了机器人爬楼过程中摇臂轮组的被动摇臂运动与行星轮组的主动翻转的爬楼方式,同时可根据各电机转矩峰值的仿真数据设计控制方案,且能对电机型号进行确定。
4 物理样机试验验证
物理样机验证爬楼机器人的爬楼越障性能以及机动性,选择台阶高度×台阶宽度为150 mm×300 mm

图10 物理样机模型及越障试验图
的楼梯进行物理样机爬楼试验,如图10所示。从图10中可以看出:机器人的前驱摇臂轮组在接触到障碍时,能够被动摇臂使得轮组适应障碍爬行。试验过程中机器人可以实现连续爬楼,且在爬楼过程中未出现轮组与楼梯干涉、倾翻失稳的情况。爬楼机器人在应对生活中常见的障碍、楼梯以及平地运动时,灵活性强,爬楼越障性能较为突出,在面对一般复杂的道路环境时具有较强的适应性。
5 结论
(1)设计了一款摇臂结构与行星结构相结合的爬楼越障机器人,实现了连续攀爬多级台阶、楼梯、斜坡以及崎岖地形,提高了轮式机器人的多地形适应能力。
(2)设计摇臂轮组采用被动方式,行星轮采用主动方式自动适应并贴合地形表面,实现了爬楼过程机器人质心变化平滑,提高了爬楼越障的稳定性。
(3)采用麦克纳姆全向轮作为机器人摇臂轮组和行星轮组车轮,克服了多轮组同时运动时阻力大、灵活性低的问题,实现了零半径自旋和全向横移,提高了机器人转向和移动效率。
(4)设计的爬楼越障机器人能够适应5种不同尺寸楼梯,载质量10 kg,13级尺寸为150 mm×300 mm的连续台阶通过时间为50 s,满足爬楼机器人的性能要求。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
新疆钢铁(2021年1期)2021-10-14
中国新技术新产品(2020年4期)2020-05-05
大众摄影(2018年7期)2018-07-05
青岛画报(2018年1期)2018-02-23
方圆(2017年24期)2018-01-17
环球人文地理·评论版(2016年9期)2017-03-15
科技创新导报(2016年27期)2017-03-14
声屏世界(2010年11期)2010-11-16