
基于地面三维激光扫描数据的等高线绘制
2021-01-20 00:54刘欣陈小歌张诗玉
商丘师范学院学报 2021年3期
刘欣,陈小歌,张诗玉
(1.河南测绘职业学院,河南 郑州 451464;2.商丘师范学院 测绘规划学院,河南 商丘 476000)
三维激光扫描技术能在更大的范围以更高的分辨率快速生成目标的三维坐标数据,过程中不需使用棱镜,能在短时间内生成能显示出来的复杂曲面的物理模型,坐标数据转化成三维激光扫描图像只需进行可视化处理,应用领域广泛.我国首次应用三维激光扫描技术建立石窟艺术宝库数字文档;三维扫描仪对秦俑二号坑进行扫描,利于文物受损后快速复原,另外在变形监测、工程测量、地形测量、断面和体积测量等都可使用.
本文就FARO三维激光扫描仪数据获取及数据处理绘制等高线作出了相关研究,希望可以在工程项目的进行中发挥重要的作用.
1 点云数据获取
1.1 工作原理
三维激光扫描系统包含采集数据的硬件部分和处理数据的软件部分.根据不同的载体,三维激光扫描系统又能分为机载、车载、地面和手持型几类.
地面三维激光操作系统由地面三维激光扫描仪、点云数据处理平台、电源及其他附属配件组成.扫描仪内部装有激光测距系统和激光扫描系统,同时还有CCD和仪器内部控制和校正系统[2].三维激光扫描的基本思路是在待测对象上投射具有特殊结构形状的激光光源,形成光条纹,然后使用左右两侧的摄像机拍摄图像,取得激光条纹的立体信息,为了迅速获取被测对象表面的三维坐标数据,激光发生器和左右摄像机同时也在围绕被测对象旋转.最后利用激光测距原理,通过高速激光发射器在短时间内测出空间三维坐标.其工作原理如图1.
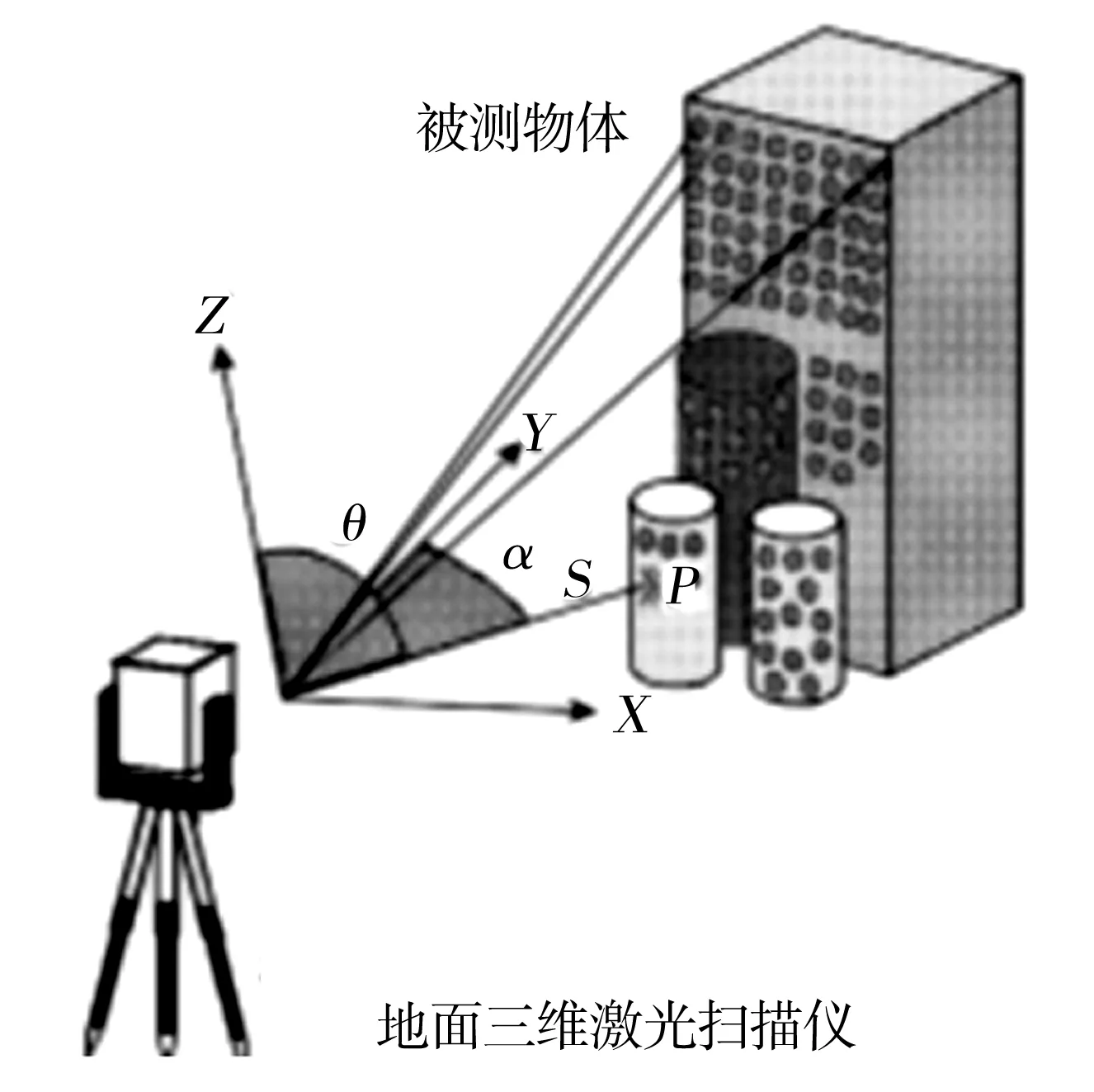
图1 扫描仪工作原理图
1.2 点云数据获取
本次课题采用的是FARO三维激光扫描仪,安装好仪器设置完参数后进行扫描,考虑到视野和地形,测区选在亚青附近的空地.在待测地点附近分散摆好5个靶标,保证能被扫描仪全部观察到,扫描时先降低数据分辨率和质量进行粗扫,然后根据需要提高分辨率精确扫描地形[1].扫描完一站后将扫描仪换至下一站,移动2个靶标直到能被扫描仪全部观察到,再次进行扫描.每站测量时都需有至少3个靶标与上一站相同,重复以上步骤测完全部5站.
2 点云数据处理
三维激光扫描仪本身具有视场角扫描距离的限制,每站只能扫描一部分数据,从多个角度不同方位进行扫描的数据要进行坐标系的统一[3],本次课题利用SCENE软件对点云数据进行坐标系配准,然后利用Geomagic Studio软件进行数据处理生成数字模型.其操作流程为:点云处理——封装为多边形——多边形阶段——造型阶段——输出模型.
当数据配准后得到的文件在CASS中处理太大,需要适当抽稀.将土地周围不需要的房屋,道路等无效扫描点删除.然后将文件以2%的采样比率打开,重新保存,查看文件大小,若仍不符合要求,反复进行以上操作直到文件大小合适,完成后将文件保存为dxf格式.
3 CASS软件中等高线的绘制
3.1 内插生成等高线
把生成的dxf格式文件导入CASS中,通过建立DTM模型和使用DEM内插方法生成等高线.
建立等高线需要的地面高程模型(DTM)之前,应找出明显高出地面的碎部点,这些碎部点无法代表当地高程,需要将其剔除,操作时把其高程改为零即可.要注意画出山脊线、山谷线、坡度变化线、地貌变向线、坡顶线和坡底线等线条,同时考虑陡坎选择,这样就能生成合理的DTM三角网,绘出精准切实的等高线.
3.2 等高线修饰和高程点的注记
绘制时遇到不应出现等高线的地物例如房屋等建筑物、双线道路、路堤、坑穴、陡坎、斜坡、湖泊、双线河、双线渠、水库、池塘以及注记的话都需要中断这条等高线.注记时将字头对准山顶或高地,遇到复杂的地段,需要注意保持地形特征的完整性.注记高程点时应选在具有明显特征的地物或地形上,注记密度根据地形类别、地物点和地形点的数量决定,一般为每100 cm2内5~10个.
4 结 语
综上所述,结合三维激光扫描绘制等高线比单纯使用CASS的效率更高,能减少工作量,尤其在处理复杂图形和自由曲面时这种优势会更加明显.虽然能为测量工作带来更多便利,为人员减少工作量,但是也存在一些缺陷和不足需要进行完善.
猜你喜欢
世界科学技术-中医药现代化(2022年9期)2023-01-17
现代仪器与医疗(2022年2期)2022-08-11
军民两用技术与产品(2021年10期)2021-03-16
西部论丛(2020年1期)2020-10-13
广东教学报·教育综合(2019年87期)2019-09-10
世界农药(2019年3期)2019-09-10
模具制造(2019年3期)2019-06-06
测绘通报(2019年1期)2019-02-15
地理教育(2016年10期)2016-11-09
肿瘤影像学(2015年3期)2015-12-09
