
干涉式光纤陀螺教学实验装置研制
2021-01-15 01:16宁治文江鹏飞韦宏玮
实验室研究与探索 2020年12期
傅 军, 常 扬,2, 宁治文, 江鹏飞, 韦宏玮
(1.海军工程大学电气工程学院,武汉430033;2.中国人民解放军92768 部队,广东汕头515800)
0 引 言
随着干涉式光纤陀螺仪(Interferometric Fiber Optic Gyroscope,IFOG)在航空、航海等领域的广泛应用[1],高等院校相关本科专业对光纤陀螺仪技术的教学需求也在不断增长。IFOG 的理论和实验教学是惯性传感器相关课程中的重要内容。Sagnac 效应是IFOG技术的物理基础[2],IFOG 螺仪可用来测量运载体相对惯性空间的旋转角速度(Angular Velocity of Rotation,AVR),运载体旋转过程中,Sagnac 相移导致光波干涉条纹产生微小移动,从而测得AVR[3-4]。
封装好的成品光纤陀螺[5]直接运用到光纤陀螺的原理教学时,只能观测其输入和输出,无法直观反映光纤陀螺仪内部光路结构、连接关系和信号特征。国内外虽有少数公司推出了一些光纤陀螺原理教学的相关产品,但是在成本、易用性和实验项目的覆盖程度上与教学需求还存在一定差距。为此根据惯性传感器原理本科相关专业教学需要,本文设计了一种同轴IFOG实验装置。其主要特点是能将光纤陀螺光路结构、连接关系进行直观展示,光纤环的敏感轴和旋转台体的旋转轴同轴设置,关键信号通过滑环从转台引出便于测量,配套的小型桌面转台转速可调。
1 总体设计
IFOG教学实验装置包括光路、电路和旋转控制三部分。光路部分主要包括超辐射发光管(SLD)、保偏光纤分束器(PMFS)、多功能集成光波导调制器(MIOC)、带骨架光纤环(PMFC)和光接收组件(PINFET)。电路部分主要包括信号处理电路板、光源驱动与温控电路板和电源配适电路板等。
信号处理电路板是电路的主要部分,信号处理电路板以FPGA为核心,包括串口模块(UART)、滤波耦合电路模块(AMP&FILTER)、温控模块(TEMP)、单端转差分电路模块(AMP2)、模数转换模块(ADC)、2 路数模转换模块(DAC1 和DAC2)、差分转单端信号模块和电源模块。
旋转控制部分主要包括旋转台体、转台调速控制盒等。转台调速控制盒包含步进电动机及相应电路板,转台调速控制盒电路板包括步进电动机驱动器模块、驱动电源模块、接口控制电路模块等[6]。转台调速控制盒通过步进电动机控制旋转台体旋转速度,并实现步进电动机转速的显示。实验装置工作原理示意图如图1 所示。

图1 实验装置工作原理示意图
光路信号首先由SLD 发出的光源以光信号的形式传到PMFS。然后信号被分成两路,一路导入PINFET;另一路经MIOC调制后,分成两束分别沿顺时针和逆时针进入PMFC。经过PMFC 顺时针和逆时针相向传播的光信号返回至MIOC发生干涉。干涉后的光信号经过PMFS 耦合,最后传输到PIN-FET。PIN-FET内部包含光电探测器等器件,可将光信号转换为电信号。
光纤环敏感轴向的角运动所引起相位差以模拟电信号的形式传到信号处理电路板上。经过交流耦合送到AMP&FILTER电路模块进行处理,经过低通滤波,过滤掉高频段的干扰信号,留下主要成分为低频的信号。为了便于高精度ADC电路处理,经过AMP2 模块将单端模拟信号转换成差分信号。差分模拟信号转换成经过ADC模块转换成数字信号,送到FPGA中进行解调、积分。处理后的数字信号传输到DAC1 模块中进行数模转换,再将差分信号转换成单端信号并传输到MIOC,使干涉仪始终工作在零相位,实现闭环反馈。闭环补偿反馈后得到的相位误差信号,一方面作为陀螺输出;另一方面作为进入反馈系统的信号,经过二次积分产生阶梯波再叠加后送入DAC1 中。在阶梯波闭环反馈调制过程中,很容易产生2π 复位,因此增加了第二闭环反馈。复位前后产生的误差信号,经积分送到DAC2,并将转换后的值加到DAC1 上面作为参考电压,放大后传输到MIOC,实现第二闭环反馈,从而实现2π复位。
经过闭环反馈后的信号,由FPGA 按用户协议处理为光纤陀螺闭环数据,通过串口UART 模块输出至计算机。上位计算机数据采集软件进行接收和保存后可计算光纤陀螺参数。
2 硬件设计
2.1 实验装置外观结构设计
IFOG实验装置包括装置主体、旋转台体、转台调速控制盒和工作台板。装置主体有底盒、固定板、透明罩。工作台板上分别设有旋转台体,与其同轴且内外设置的旋转轴和滑环,旋转轴与旋转台体和滑环固定相连,旋转台体与步进电动机的动力输出端同轴固定相连,旋转轴顶部从下到上依次同轴设有连接件、底盒组件和光纤陀螺组,底盒通过过渡板安装在旋转台台面[1]。底盒盒体内分别设有电源配适电路板、信号处理电路板和光源驱动与温控电路板,盒体中心设有与滑环同轴设置,用于引入滑环导线的通孔。光纤陀螺组件的固定板沿周向分别均布有SLD、PMFS、PINFET、MIOC、PMFC,固定板顶部中心设有凸台,凸台顶部设有与旋转轴同轴设置的带骨架光纤环。透明罩起防尘、保护作用。电动旋转台电动机朝向左手,控制端口接线就近引入底板内槽,连接至转台调速控制盒。滑环定子端导线就近引入底板内槽,连接至转台调速控制盒。为避免电磁干扰,旋转台控制线与滑环定子端导线不共槽。转台调速控制盒底座、转台调速控制盒上盖和旋转台体安装在工作台板上,并在工作台板上加工6 个安装孔,其孔距是50 mm 的倍数,便于安装在其他光学平板上。装置主体、旋转台体、转台调速控制盒之间所有电线连接均布设为暗线。图2 为实验装置外观结构图。
2.2 光路设计
(1)光路工作原理。IFOG 能测量角运动是基于Sagnac效应[8-9],即在含有光纤环组成的闭合回路中,从其中一点开始相向传播的两束光波,绕行光纤环一圈回到该点时,两束光相位发生相应变化,运载体旋转过程中,Sagnac相移使光波干涉条纹产生微小移动,相向传播的光经过的路程不等,产生的光程差与AVR成正比,AVR从而能由光程差求得。图3 是IFOG 光路基本原理图。
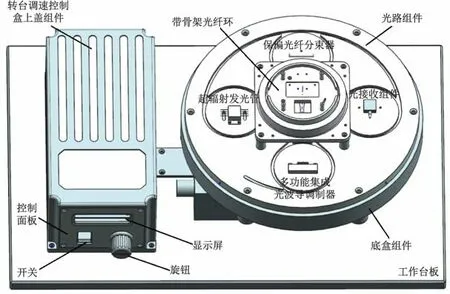
图2 实验装置外观结构图
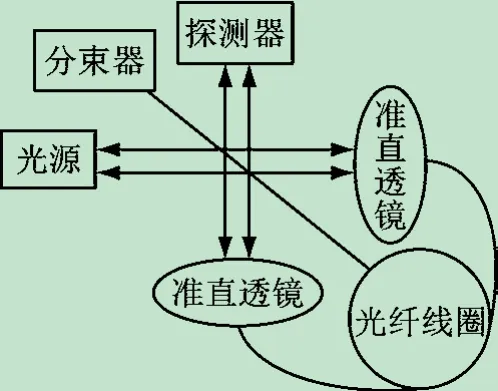
图3 FOG光路基本原理图
对于图3 的光路结构,IFOG固有响应是一个余弦函数,光检测器检测到的光信号强度与输入光强、输入角速度引起的相位差的关系为

在AVR很小的情况下,FOG 输出的灵敏度很差,为了获得做大的灵敏度,需对其0.5π 的相位偏置,这样可以分别出传播的角速度方向,也可以在零输入点附近测得最大的灵敏度[10]。测得的角速度信息由相应电路检测和处理,

(2)光路结构设计方案。根据光纤陀螺实验装置的应用背景和教学实际需求,综合考虑装置实验效果、体积、成本、加工难度等多因素的影响,选取了以典型最小互易性结构为光路基本结构,对SLD、PMFS、MIOC、PMFC、PIN-FET等光学器件的选择和布设结构进行了优化设计。SLD是用于提供产生干涉信号的超带宽光源,并将光信号输入到光路结构中,光源采用1.31 μm 工作波长。PIN-FET 用于探测干涉光信号,将其转换为电信号进入后续检测电路进行处理,本装置采用400 kΩ高灵敏度PIN-FET。PMFS用于将光源的光信号引入MIOC和PMFC,再由MIOC返回的干涉信号引入PIN-FET。MIOC集成了传统FOG结构中的单模滤波器、偏振器、线圈分束器和相位调制器的功能,完成对输入线圈光信号和线圈输出的光信号处理。光纤环光纤长度1 100 m,光纤环内径75 mm,光纤环高度15 mm。采用了直径80 μm、外径135 μm的熊猫型保偏光纤绕制,光纤环绕制厂家给出的100 s 定温零偏稳定性理论估计精度可达0.01°/h,足以满足光纤陀螺实验项目中对地球自转角速率观测需要[11]。光路连接原理见图4。
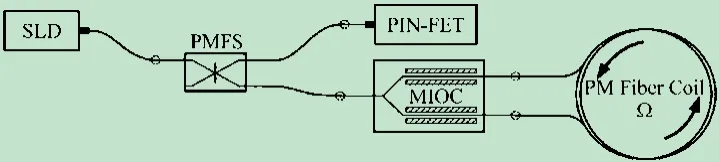
图4 光路连接原理图
实验装置整个光路分为两层平摊在主体底盒顶部。光纤环置于顶层,其敏感轴与底盒转轴重合。
2.3 电路设计
电路部分主要包括信号处理电路板、光源驱动与温控电路板和电源配适电路板。上述部分均放置于圆形的主体底盒内部。信号处理电路板是电路的主要部分,负责信号的处理、闭环反馈补偿和最后的信号输出。光源驱动与温控电路板通过导线与超辐射发光管相连,用于精确控制超辐射发光管处于恒温和恒流的工作状态。电源配适电路板作为电源模块为系统各部分工作提供电源。
(1)信号处理板原理设计。信号处理电路是实验装置的核心部分,接收光路输出信号后进行处理输出,以FPGA为处理核心,具有并行度高、可灵活定制和重构等优点[12]。信号处理电路板通过MAX3294 将FPGA串行接口转换为RS-232 标准电平后与上位机进行串行通信[13]。信号处理电路板上电源模块将外部电源提供的5 V电压转换成一路3.3 V和一路1.2 V电压模块。另外,电源部分提供的5 V 电压一路给数字信号电路供电;另一路给模拟信号电路供电。FPGA在装置中的作用有:产生时钟信号、奇偶相减解调误差信号、数字积分、数字滤波、陀螺信号输出、产生相位阶梯波并实现反馈、叠加方波偏置信号、修正2π电压。
电路板中AMP&FILTER 模块包含交流耦合和低通滤波电路,选用ADA4857-2YCPZ-R7 放大集成电路实现。ADA4857 是一款单位增益稳定的高速、电压反馈型放大器,具有低失真、低噪声与高压摆率。在AMP&FILTER模块中,光电探测器输入的信号通过隔直电容耦合,去掉了直流分量,再经过滤波器阻隔高频信号,实现低通滤波。AMP2 模块选用了ADA4932-1YCPZ-R2 单端转差分放大集成电路。在陀螺信号处理过程中,需要差分信号以获得较高的信噪比,提高对共模噪声的抑制能力,并获得较低的二次谐波失真。ADA4932-1 具有高性能、低噪声和低功耗,适合用作驱动高性能ADC的单端转差分放大器,其内部共模反馈环路调整输出共模电压,使其输出与ADC的输入相匹配。内部反馈环路可提供输出平衡,抑制偶数阶谐波失真。ADC选用AD9220ARS模数转换集成电路实现[14],产生数字信号传输给FPGA。DAC1 和DAC2 分别选用LTC1668IG和LTC1658CMS8 数模转换集成电路。FPGA 产生的数字相位阶梯波,送入产生LTC1668IG产生模拟信号。LTC1658CMS8 是一个单电源的14 位数字模拟转换器,为LTC1668IG 提供基准电压。DRIVER 模块中,选用LT1809IS8 差分转单端集成电路实现。LT1809IS8 是低失真、轨至轨输入和输出运算放大器,可将差分信号转换为单端信号作用在MIOC的电极上。
信号处理电路板上经光接收组件输出的信号、经AMP&FILTER模块耦合滤波后的信号、经差分转单端信号模块双端信号转换为单端后的开环检测信号等关键信号通过滑环从转台引出,供学生测量使用。
(2)光源驱动电路设计及仿真。光源驱动需要恒流源按程序控制提供稳定的工作电流。光源驱动电流范围为0.1 ~1.0 A。选用一种分立式电流源电路实现。恒流源电路设计中增加了一个延迟电路,可以用来延迟上电。为了优化电路参数,测试恒流源延迟电路的性能,应用multisin12 软件进行了仿真验证,仿真电路及模拟结果见图5。图中:Q1为三极管,Q2为场效应管,分别接5 V和2.5 V电源。XFG 为函数生成器,其产生的控制电压经R1、R3分压后加到Q1。当电源上电时,C1开始充电,此时Q2阈值电压尚未达到,所以Q2为关闭状态。等到C1逐渐充电完成,此时满足阈值电压,Q2开启,后级电路通电。R2的作用是下电时对于电容进行放电以及设置Q2的G极电压。由于场效应管的开启和关断受控,所以选用三极管更合适负载控制及延迟上电。XSC 为虚拟示波器,用来观察输出信号。
调节函数生成器,使其产生锯齿波,调制信号频率设置为500 mHz,占空比为50%,振幅为2.5Up,offset设置为3 V。用示波器观察输出信号波形,图5 中右侧红色、绿色曲线代表示波器的输出信号波形,分别与左侧相应颜色的电路线具有对应关系。在模拟结果中,延迟处理后的红色曲线上升触发时间点比延迟处理前的绿色曲线晚了约140 ms。结果表明,此电路能达到了延迟效果。

图5 恒流源延迟电路仿真图及模拟结果图
(3)信号预处理电路设计及仿真。信号预处理电路通过集成设计,实现对输入信号的交流耦合、信号放大、低通滤波、单端转差分等功能。
为了优化电路参数,测试预处理电路的性能,同样应用multisin12 软件进行了仿真验证,信号预处理电路仿真及模拟结果见图6。光接收组件输出电信号给预处理电路,在仿真中用函数生成器XFG模拟此电信号。放大器U1A及周边电路可以实现同相交流耦合和2 倍信号放大,放大器U1B及周边电路可以实现信号低通滤波,放大器U2及周边电路可以实现单端转差分。处理后得到的差分信号,再传给ADC转换成数字信号,最后输出至FPGA。图中XBP 为频率特征测试仪,XSC为虚拟示波器,用来观察输出信号。
调节函数生成器,使其产生锯齿波,调制信号频率设置为100 kHz,占空比为50%,振幅为50Up,offset设置为0 V。频率特征测试仪通过扫描锯齿波实现频率调制,显示屏上所“描绘”的曲线反映了被测网络的幅频特性。频率特征测试仪设置数值如图6 所示。分别用3 个示波器观察电路中关键信号波形。在模拟结果中,XSC1 中红色锯齿波为函数生成器输入波形,绿色锯齿波为经过耦合放大后的波形,处理后频率不变幅值变大。XSC2 中的红色锯齿波是经过低通滤波后的波形,过滤掉了XSC1 中绿色高频曲线,保留了红色低频曲线。XSC3 中的蓝色锯齿波是经过单端转差分后的其中一端的波形,与处理前的单端信号幅值大小相 等。以上结果表明,此预处理电路可以实现预定功能。
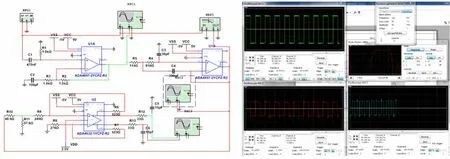
图6 信号预处理电路仿真图及模拟结果图
2.4 转台调速控制
本装置设置有与陀螺仪同轴旋转的旋转台体,旋转台体由转台调速控制盒控制。转台调速控制盒结构包括底座和上盖,底座上设有步进电动机驱动器模块、驱动电源模块和接口控制电路模块,步进电动机驱动器模块的控制端与步进电动机和旋转台体相连。转台调速控制盒上盖正面的面板上设有显示屏、旋钮和开关,背面设有DB9 插座和三合一开关。
转台调速控制盒内单片机选用STC15W4K56S4。该单片机兼容51 内核,相比其他单片机具有扩大片内资源的优点。可通操作转台调速控制盒面板、旋钮和开关控制步进电动机(森创SD-20403)的转速,从而达到控制旋转台体的目的,同时将转速显示在显示屏上。图7 为转台调速控制盒原理示意图。

图7 转台调速控制盒原理示意图
3 软件设计
实验装置软件主要分为信号处理程序和转台调速控制盒程序两部分。
信号处理程序是本装置软件部分设计核心,采用了0.5π相位方波偏置调制和阶梯波反馈调制方法。检测电路将电信号滤波、放大并转换为数字信号,在FPGA中完成奇偶相间数字解调,经过累加、求平均、求差值等运算获得相位误差信号。相位误差信号数字积分得到速率值,保存在速率寄存器中。一路抽样滤波,并采样输出至计算机;另一路作为闭环反馈的输入信号继续累加处理[15]。速率寄存器之后有两次加法器。第1 次加法器的作用是数字累加出阶梯波,阶梯波的宽度即为光纤环渡越时间,台阶高度与旋转引起的相位差大小相等,即位等于陀螺的输出值。第2 次加法器的作用是通过阶梯波与偏执调制信号的累加,输出关于渡越时间周期性的方波,抵消了原有差值而置零,达到负反馈补偿的效果。调制后的信号作用于推挽式连接的MIOC,实现闭环负反馈控制。图8 为信号处理程序流程图。
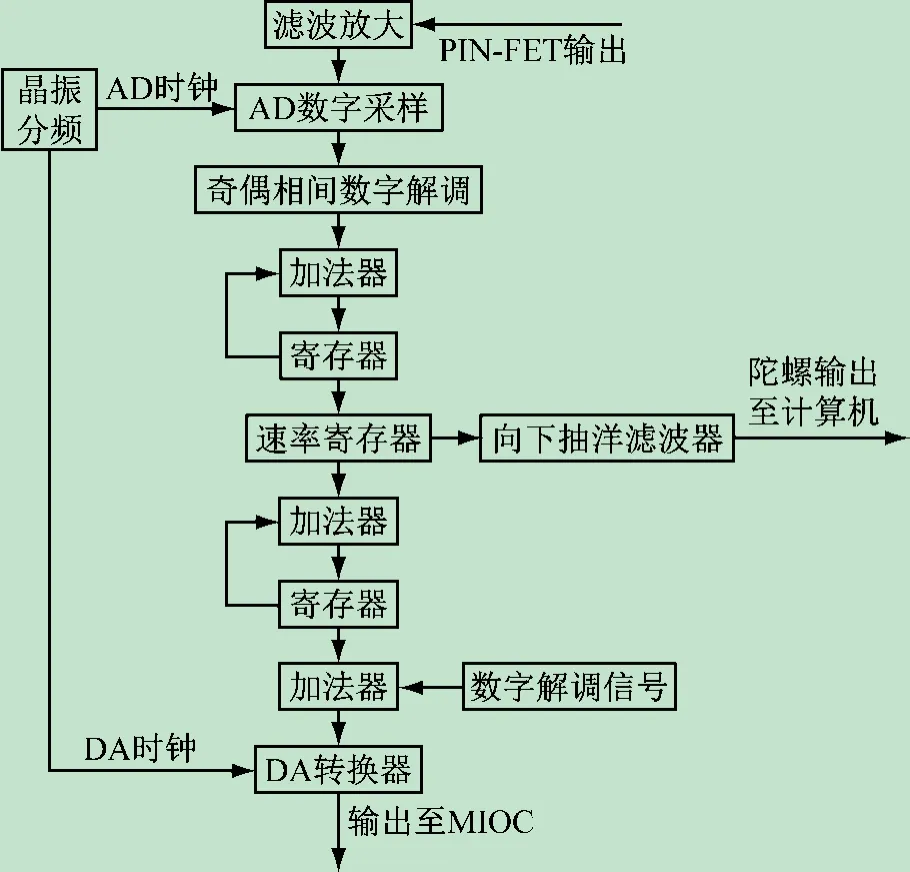
图8 信号处理程序流程图
转台调速控制盒程序采用模块化编程设计,系统程序主程序负责系统的初始化和子程序的调用。在主程序中,通过不断查询得到电位器设定速度值,并与当前速度值相比较,如果超过差值阈值,就重新设置当前速度值,同时刷新显示内容。定时器不断产生定时中断,根据人机交互情况更新状态,产生步进电动机驱动脉冲,从而控制步进电动机的转速。显示子程序用来完成状态更新和显示功能[15]。
4 实验操作案例
实验装置可开展光源输出特性实验、光纤环特征频率实验、Y波导相位调制半波电压测试实验、光路信号输出测试实验、陀螺仪静态实验、陀螺仪手动旋转实验、陀螺仪转台旋转实验、开环数字输出实验、闭环数字输出实验等。
以陀螺仪转台旋转实验为例,该实验的目的是能让学生理解陀螺仪中信号调制解调原理、信号检测原理,更好地观察Sagnac效应。陀螺仪转台旋转实验具体操作步骤如下:
(1)连接教学实验装置的电源和相关电缆,打开电源供电。
(2)信号处理电路板上各关键信号通过相应串口与滑环相连,从转台引出,并连接到示波器。
(3)打开计算机采集软件,UART 模块接口与计算机相连。
(4)通过转台调速控制盒设置转台。
(5)打开并调节示波器,分别观察不同转速情况下的信号特征,记录信号波形。
(6)启动计算机,打开数据采集软件,分别采集不同转速情况下光纤陀螺输出的闭环数字信号。
(7)处理并计算实验数据。
(8)断开实验教学仪器的电源和相关电缆连接,实验结束。
通过设定转台为不同速度,用示波器测量滑环从各接口引出的关键信号,可得到数据处理各阶段的信号特征,观察信号波形特征,使学生加强对陀螺仪调制解调原理、开环或闭环检测原理的理解。通过计算机采集软件测量和处理不同条件转速下陀螺仪输出的实验数据,结合装置中给定的陀螺仪关键参数,从而计算出当前实验中转台的即时旋转速度。通过计算结果与陀螺仪转台显示屏上的显示转速对比,在误差范围内,两者结果一致。实验结果可以得出:当PMFC 的旋转方向与光信号传输的方向一致时,相对于静止状态下的距离,该光信号传输的距离会相应变大;反之,光信号传输的距离会相应缩短,加深学生对光纤陀螺萨格奈克效应的理解。
5 结 语
本文研制的同轴旋转干涉式光纤陀螺教学实验装置采用光路最小互易性结构,结构简单,可在教学中方便灵活开展光源输出特性实验、光纤环特征频率实验、Y波导相位调制半波电压测试实验、光路信号输出测试实验、陀螺仪静态实验、陀螺仪手动旋转实验、陀螺仪转台旋转实验、开环数字输出实验、闭环数字输出实验等。介绍同轴干涉式光纤陀螺实验装置总体结构、硬件及软件设计方法,给出了系统设计原理图、部分硬件接口电路图和相关程序流程图。实际使用表明,可直观实现光纤陀螺结构展示和物理原理验证,加深学生对光纤陀螺萨格奈克效应的理解,了解掌握光纤陀螺组成和软硬件设计,对本科相关专业惯性传感器理论教学具有重要促进作用。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
信号处理(2018年5期)2018-08-20
信号处理(2018年5期)2018-08-20
信号处理(2018年8期)2018-07-25
信号处理(2018年8期)2018-07-25
百科探秘·航空航天(2017年9期)2017-12-31
计算机测量与控制(2017年6期)2017-07-01
资源再生(2017年4期)2017-06-15
中国惯性技术学报(2017年1期)2017-06-09
电子制作(2017年23期)2017-02-02
