
三相VIENNA整流器的快速重复控制策略
2021-01-15 01:16王素娥缑杨科郝鹏飞燕晨阳
实验室研究与探索 2020年12期
王素娥, 缑杨科, 郝鹏飞, 燕晨阳
(陕西科技大学电气与控制工程学院,西安710021)
0 引 言
三相PWM整流器可以实现功率因数校正的优点在风力发电、通信电源、电动机驱动等方面得到应用[1-3]。三相VIENNA 整流器具有三电平的优势,由于其拓扑结构简单,控制过程不需要考虑死区问题,得到了国内外学者的广泛青睐[4-5]。目前对于VIENNA整流器控制策略的研究已经有了大量的成果。文献[6]中针对传统的PI控制器响应速度慢的问题,提出了滑模和自抗扰控制相结合的控制策略,该算法提高了直流电压的动态响应速度,但是交流电流的谐波分量控制策略没有明显变化。文献[7]中针对网侧输入电流谐波含量大的问题,采用预测直接功率控制策略,基于瞬时无功理论,在静止坐标系下进行控制,但是其参数整定费力耗时。文献[8]中在电网电压不平衡的情况下使用谐振滑模控制策略,对其负序电流进行抑制。
重复控制策略对周期性信号的跟随和控制有很好的效果[9]。针对PWM变流器的交流电流谐波较大的问题,文献[10-11]中分别采用比例重复控制策略和比例积分和重复控制的复合控制策略作为电流内环的控制策略。文献[12]中将重复控制和比例积分控制的串联和并联两种复合控制策略进行了分析和对比,指出相比于串联控制,并联控制的谐波抑制能力更好,而且系统的动态性能和鲁棒性更好。
VIENNA整流器的奇次谐波分量在旋转坐标系下转化为偶次交流信号,本文针对偶次交流信号记性内模部分的设计,提出了针对VIENNA 整流器的奇次谐波的快速重复控制策略,它可以抑制所有的奇次谐波,具有谐振控制的特性。相比于传统工频周期下的重复控制,快速重复控制策略算法更为简单,数据存储量减小一半,延时周期缩短一半,有更快的响应速度。
1 VIENNA整流器的数学模型
如图1 所示为VIENNA整流器的拓扑结构图。图中:ea、eb、ec代表三相交流电源;L 代表交流侧的电感;R为电感和线路的等效电阻;C1和C2代表直流侧的电容;开关电路由三相不可控整流器(VD1~VD6)和三组双向开关(Sa、Sb、Sc)组成。假设三相电网电压平衡,电感电流为连续模式,建立含奇次谐波的三相交流电流在旋转坐标系下的数学表达式[13]:

式中:k为所有的正整数;I1为电流基波分量的幅值;Ii为各奇次谐波分量的幅值;ω0为基波角频率。由式(1)可得,2k +1 次奇次谐波在旋转坐标系下转化为2k次偶次谐波。
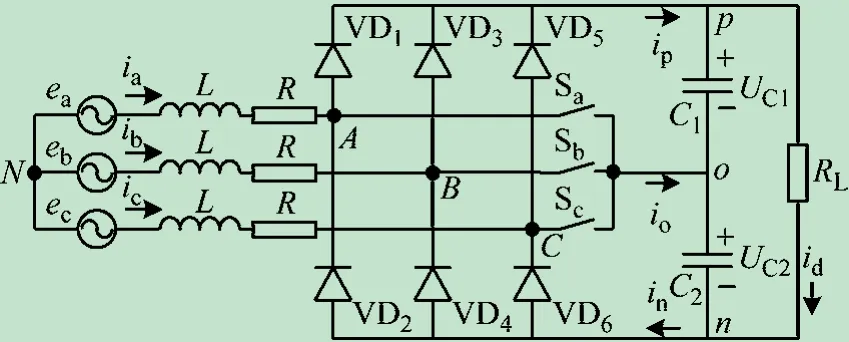
图1 VIENNA整流器拓扑结构图
建立VIENNA 整流器在旋转坐标系下的数学模型。
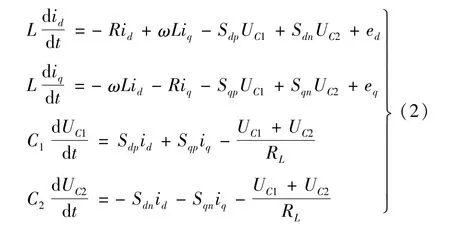
式中:RL为负载电阻;UC1和UC2分别为直流侧电容电压;id、iq和ed、eq分别为交流电流和交流电压的有功分量和无功分量。
由式(2)可以得出旋转坐标系下的电流分量相互耦合,需要进行解耦。电压外环使用传统的PI控制器进行闭环控制,电流内环使用PI +重复控制进行闭环控制,基波分量转化为直流量使用PI控制器进行闭环控制,各次谐波分量经过重复控制器进行闭环控制,其控制框图如图2 所示。
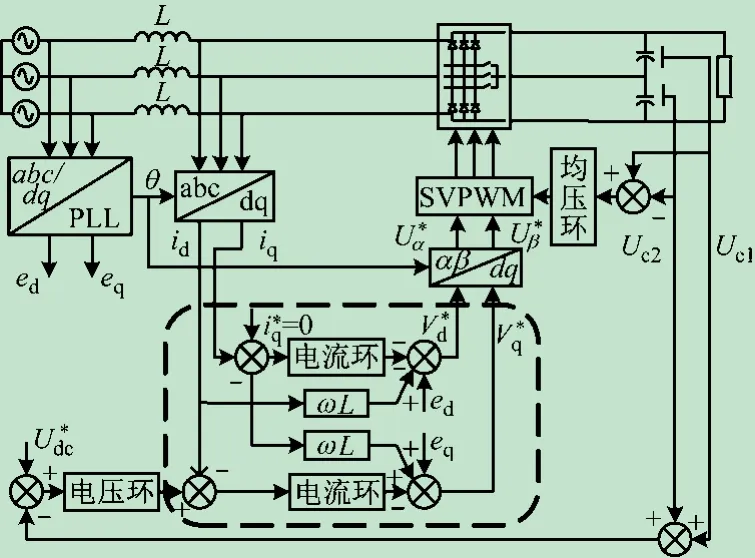
图2 VIENNA整流器的控制框图
2 快速重复控制器的设计
2.1 传统的重复控制内模环节
传统重复控制内模部分的传递函数:
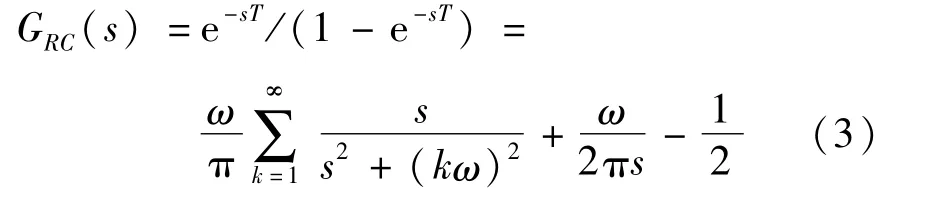
式中:T 为电网电压的基波周期;ω =2π/T 为基波频率。
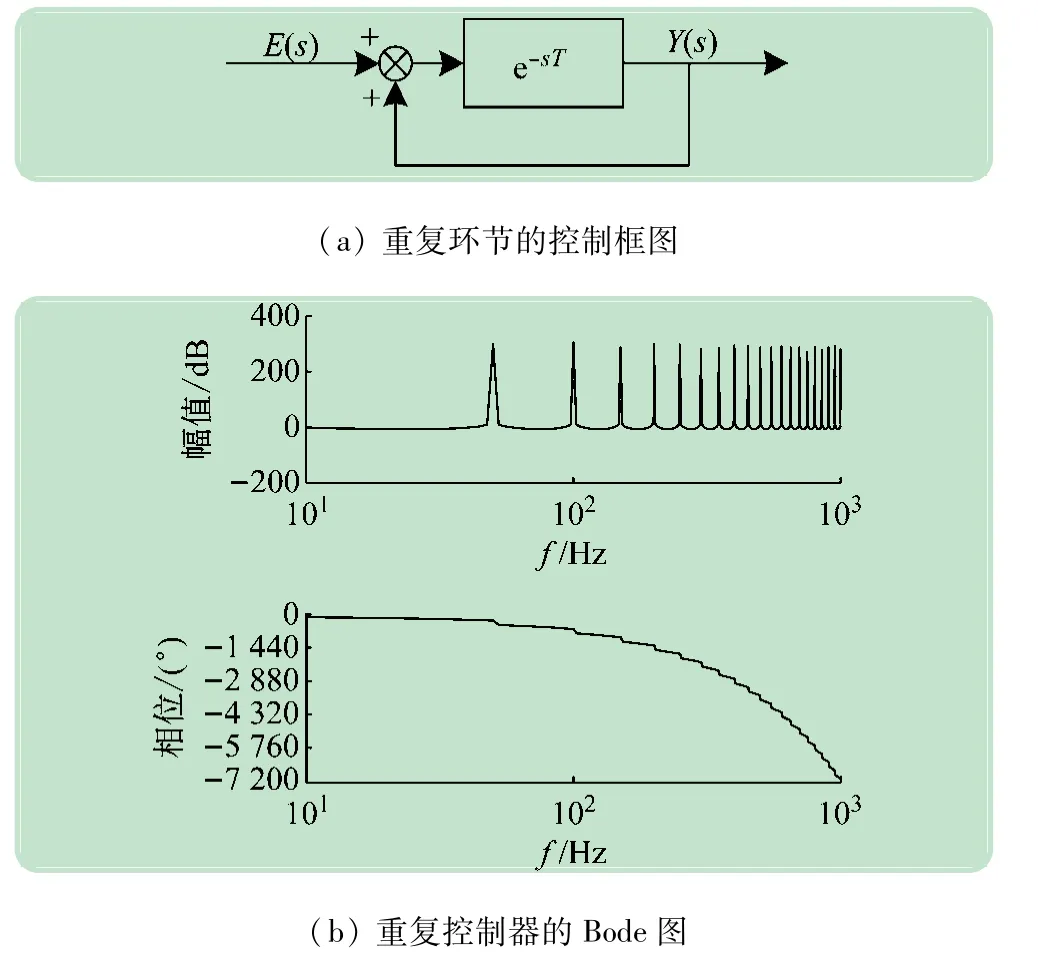
图3 重复控制器的控制框图和Bode图
由式(3)可以得出,重复控制可以看作一系列PR控制器并联组成。图3 为重复控制器的控制框图和伯德图,可以看出,重复控制器对各次谐波都具有高增益,表明重复控制器可以抑制任意次谐波。但由于重复控制器必须要有一个周期的延时才能进行控制,所以其动态响应速度较慢。
2.2 快速重复控制内模环节设计
针对奇次谐波坐标变换后为偶次谐波,即100、200、300 Hz 等,本文提出快速重复控制策略,其传递函数为
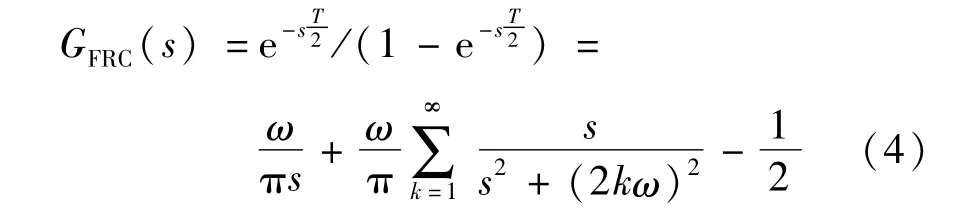
控制框图和伯德图如图4 所示。
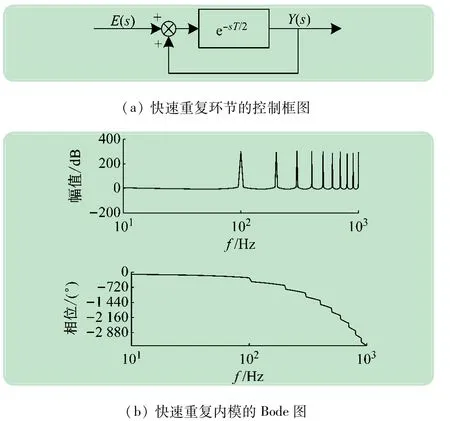
图4 快速重复控制器的控制框图和Bode图
由图4 可以看出,快速重复控制只在偶次周期具有高增益,而且其迟滞环节的延时只有基波周期的一半。为了对基波周期进行快速的跟随,本文使用PI +快速重复控制作为VIENNA整流器电流内环的控制策略,其电流内环控制器如图5 所示。图中:G1(z)为PI控制器;G2(z)为快速重复控制器;R(z)和Y(z)分别为电流环的输入输出信号;E(z)=R(z)-Y(z)为偏差信号;电流环的被控对象为P(z);D(z)为干扰信号。
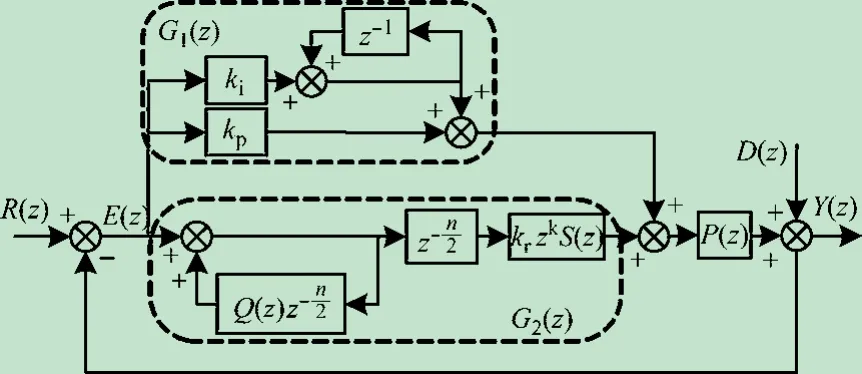
图5 电流内环控制框图
2.3 系统稳定性分析
由图5 可以得到本文提出的电流环系统传递函数由PI的传递函数(G1(z))和快速重复控制的传递函数(G2(z))并联得到。具体形式:
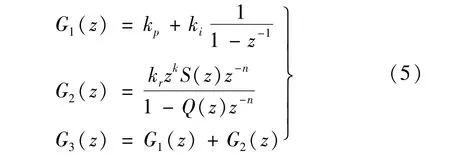
由式(5)可以得出系统闭环传递函数

为了方便化简,令

将式(5)和式(7)代入式(6),系统的闭环传递函数为
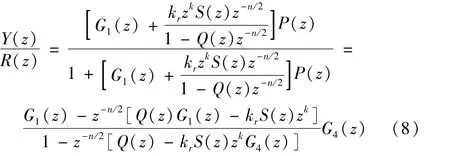
由式(8)易知,系统稳定的必要条件为:①特征多项式1 +G1(z)P(z)=0 的根全部在单位圆内;②根据小增益定理[14],得:

式中:0 <ω <2π/T。
条件①表明,要使系统加入快速重复控制器稳定,G4(z)必须是稳定的;条件②表明,G(z)的模值应当小于1,即其Nyquist曲线在单位圆内部。
2.4 补偿器设计
补偿器的设计主要包括kr、超前环节和校正环节3 个方面。其主要作用是针对重复控制器的问题进行补偿,提高系统整体特性。超前环节zk只对系统的相位有影响,而校正环节的设计对系统的增益和相位都有关系。
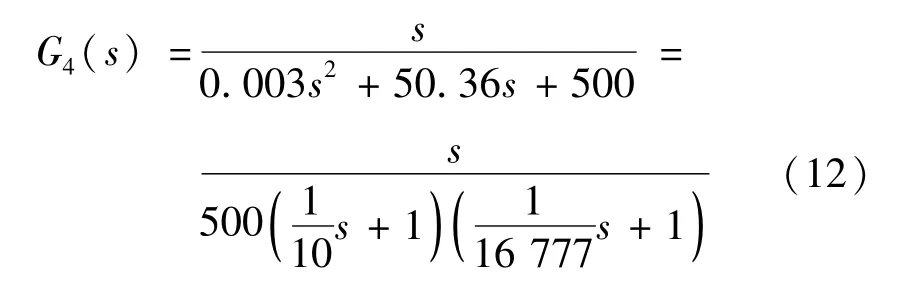
一般kr为小于1 的数,kr值越小,系统的稳定性就越好,但是稳态误差会相对增大。在前1 周期产生误差信号之后,通过校正环节在后1 个周期对相位和幅值同时进行补偿。校正环节的设计是补偿器最主要的环节,其设计主要是对控制系统的幅值和相位的校正,使校正后的控制对象在低频段和中频段零增益和零相移,而在高频段幅值衰减的特性,从而增强系统的抗高频干扰能力。由VIENNA整流器的拓扑结构可以得到电流环的被控对象的数学模型为P(s)=1/(Ls +R)。而对于内模的校正环节需要对传递函数G4(s)进行校正,根据式(7)可以得到其连续域的传递函数为

对于G4(s)和S(s)串联后的相位滞后,使用超前环节zk进行补偿。一般超前环节和内模的延时环节配合校正。
3 控制器参数选取及仿真验证
为了验证快速重复控制策略在三相VIENNA的整流器中的效果,本文使用MATLAB 的Simulink 仿真平台进行仿真。仿真参数如下:线电压有效值us=220 V,交流电压额定频率f0=50 Hz,采样频率fc=20 kHz,交流侧电感L =3 mH,等效线路阻抗R =0.36 Ω,直流侧电容C1和C2=1 mF,直流侧电压给定udc=800 V,直流侧负载RL=100 Ω,比例系数kp=50,积分系数ki=500。其中,采样频率和开关频率均为20 kHz。
3.1 控制器参数选择
为了对基波有较快的动态响应和稳态的无静差跟随,使用工程整定法得到PI参数。电网频率的波动一般在49.5 ~50.5 Hz之间,为了抑制电网波动对系统稳定性的影响,由文献[15]可得内模系数Q 与ωc的关系式,选取ωc=3.14 rad/s,推出内模系数

将参数代入式(10),结果如下:
本文的采样频率为20 kHz,并且整流器主要谐波在1 kHz以内,故设计补偿器的截止频率为1 kHz。为了使校正后的系统实现在低频和中频段零增益和零相移,即忽略高频段的惯性环节,使得补偿器与传递函数的乘积为1,故校正环节需要将低频极点消除,并且将低频增益补偿至0 dB 处;同样,为了加快高频段的衰减,校正环节应在截止频率处增加一个极点,使得高频衰减的速度加快,从而增强其抗高频干扰的能力。但由于G4(s)的高频极点与截止频率相近,故简化在G4(s)高频极点处增加极点。
校正环节的形式

式中,-1/τ1为G4(s)的低频极点;-1/τ2为G4(s)的高频极点;K为G4(s)增益的倒数。
根据式(12)可以得:

将式(14)代入式(13)并经过双线性变换得到校正环节的离散域表达式

将式(12)转换到离散域与式(15)串联表达式

图6 为校正前传递函数G4(z)、校正环节传递函数S(z)和校正后传递函数S(z)G4(z)的伯德图。相比于校正前系统G4(z),经过校正的系统S(z)G4(z)基本实现在低频和中频处零增益,在高频处衰减,故校正环节的设计可以达到预期效果,而零增益可以由超前环节进行补偿。

图6 校正环节效果
根据被控对象和补偿环节带来的相位滞后设计超前环节zk,其补偿效果如图7 所示,选取k =3 时,超前环节的相位校正可以实现。

图7 补偿环节效果
根据条件(2)判断系统稳定性,G(z)的Nyquist曲线如图8 所示,在单位圆内部,条件2 成立,因此系统稳定。
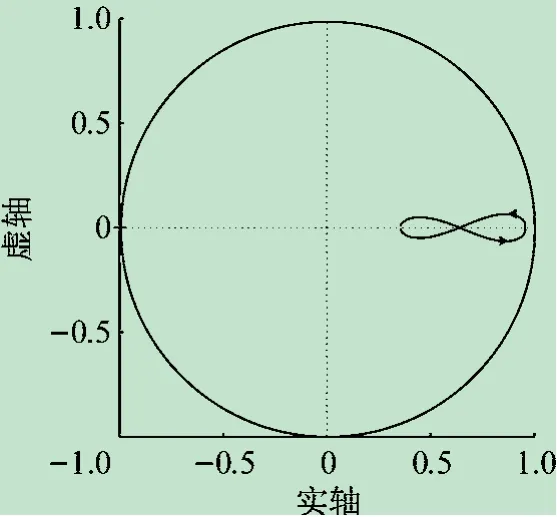
图8 G(z)的Nyquist曲线
3.2 仿真实验验证
根据上述系统参数,在MATLAB/Simulink 搭建仿真模型进行实验验证,对比PI +重复控制策略和PI +快速重复控制策略的电流畸变率的响应时间。
如图9 所示为电流内环采用PI +重复控制策略的三相交流电流的启动波形,在刚开始的1 个周期(0~0.02 s)内,重复环节还没有起作用,电流有较大的畸变;在0.02 s 重复环节开始起作用,对电流尖峰开始减小,经过3 个周期的控制,在0.06 s 电流尖峰被抑制在20 A以内,在0.1 s逐渐趋于正弦。

图9 PI +重复控制策略的电流启动波形
如图10 所示为电流内环采用PI +快速重复控制策略的三相交流电流的启动波形,重复环节在0.01 s开始起作用,经过1 个周期的控制,在0.02 s 电流尖峰被限制在20 A以内,在0.06 s逐渐趋于正弦。
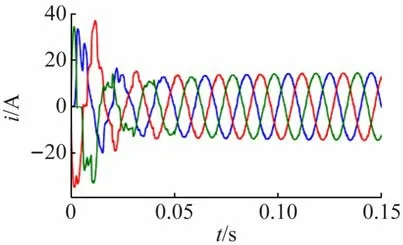
图10 PI +快速重复控制策略的电流启动波形
如图11 所示为电流内环采用PI +重复控制策略的THD变化曲线,在第1 个周期由于THD 模块需要对数据进行采集,故图为0.02 ~0.15 s的THD变化曲线。大约0.1 s交流电流的THD 下降到5%,并且继续下降。图12 所示为电流内环采用PI +快速重复控制策略的THD 变化曲线,大约0.06 s 交流电流的THD下降到5%,并且继续下降。所以相比于传统的重复控制策略,快速重复控制策略对电流谐波的响应速度更快。
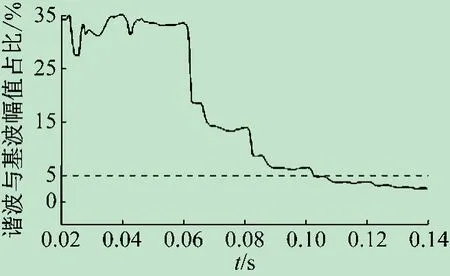
图11 PI +重复控制策略的THD变化曲线
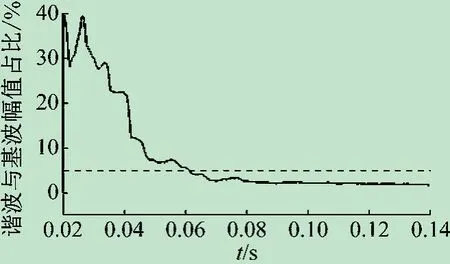
图12 PI +快速重复控制策略的THD变化曲线
4 结 语
三相VIENNA整流电路是能量单向流动的充电桩前级整流的常用拓扑。本文针对传统电流内环的PI+重复控制策略,系统计算量大和数据存储量大的问题,分析了三相VIENNA 整流器的电流谐波主要为奇次谐波,奇次谐波经坐标变换,在旋转坐标系下为偶次交流分量,提出了针对奇次谐波的PI +快速重复控制策略,并在Simulink 仿真平台进行仿真验证。得出以下几点结论:①与传统的PI +重复控制策略相比,PI +快速重复控制策略缩短了内模环节的延时周期,从而简化了重复控制器的算法,减少了数据存储量;②PI +快速重复控制策略只针对奇次谐波有抑制效果,所以内模延时时间减少一半,加快了输入电流谐波的动态响应。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
科学家(2021年24期)2021-04-25
成都信息工程大学学报(2021年6期)2021-02-12
水泥工程(2020年4期)2020-12-18
自动化学报(2019年12期)2020-01-19
电机与控制学报(2018年9期)2018-05-14
电子制作(2017年19期)2017-02-02
通信电源技术(2016年4期)2016-04-04
住宅科技(2015年11期)2015-12-08
