
基于扫描式激光雷达的海上风电机组功率曲线测试方法
2021-01-13 07:39谢贤彬
节能技术 2020年5期
谢贤彬
(福建省新能海上风电研发中心有限公司,福建 福州 350108)
0 引言
风电机组功率曲线测试的关键在于对自由流风速的测量,现行的测试标准[1]规定风速测量点应选在距离被测机组2~4倍(宜选2.5倍)叶轮直径的位置,同时需考虑地形变化、周围障碍物和运行机组对测试造成的尾流影响。目前陆上风电场主要采用传统测风塔[2]和地面垂直式激光雷达[3]两种方法进行测风,但由于在海上建造测风塔和激光雷达支撑基础的施工难度大,而且还涉及海域征用和测试结束后拆除等难题,导致采用这两种方法进行海上风电机组功率曲线测试的周期长、成本高、经济性差[4]。为此IEC提出了基于机舱风速计法的功率曲线测试方法[5],但该方法的测量误差受场址条件和机组配置的影响较大[6],在实际中难以推广应用。
随着海上风电的快速发展,如何经济合理地对海上风电机组的功率曲线进行测试验证成了风电场运营商、整机厂商和测试机构共同关心的问题,因此为海上风电机组的功率曲线测试寻求更为经济和高效的测风方法显得很有必要。扫描式激光雷达作为最新一代测风激光雷达技术的代表,应用前景广阔,近年来业内许多专家学者对其进行了大量的研究。文献[7] 基于最小二乘拟合算法,提出了采用数据有效率、残差和信噪比等判据对扫描式激光雷达测试数据进行质量控制的方法,有效地提高了反演数据的精度。文献[8] 基于梯度下降算法,提出了一种新的VAD风场反演算法,可同时兼顾扫描式激光雷达的测量效率和准确性,有效地提升了其对动态风场的监测能力。文献[9] 在春季季风间断期间利用扫描式激光雷达进行大气风廓线测量试验,验证了采用激光雷达对海陆风特征进行观测的可行性。文献[10] 基于激光雷达的观测数据,通过统计分析验证了其在低空大气急流结构特征监测中的有效性。以上研究表明,扫描式激光雷达经过数据的质量控制和算法的优化设计,其测量精度已得到了很大提高,并已在气象监测、环境监测和飞行安全测试等领域得到了应用[11],但因风电机组功率曲线测试对风速测量精度的要求更高,其适用性还需进一步验证。
本文基于上述扫描式激光雷达设计了一套功率曲线测试系统,然后通过现场试验阐述用其进行海上风电机组功率曲线测试的方法,并分析验证其可行性。
1 扫描式激光雷达介绍
扫描式激光雷达是一种新型结构的测风设备,原理上与地面式垂直激光雷达相似,不同之处在于其激光发射窗口安装在一个角度可双向(俯仰、圆周方向)调节的伺服扫描机构上,可实现双轴转镜的三维扫描,测试时无需像地面式垂直激光雷达那样安装在风速测量点的正下方,只需在激光雷达探测范围内选择合适的位置进行安装,然后采用固定仰角连续改变方位角的PPI扫描测量模式进行测量即可。用它进行海上风电机组功率曲线测试时,需在目标位置附近扫描一个扇区,测出同一层高处若干个测量点的径向风速,然后通过VAD(Velocity Azimuth Display)反演计算得到目标位置的水平风速和风向[7]。其中所采用的VAD反演方法要求风场满足水平均匀性假设条件,海上风电场周边均为平坦海面,符合这一使用要求。本研究所采用的扫描式激光雷达的主要参数如表1所示。
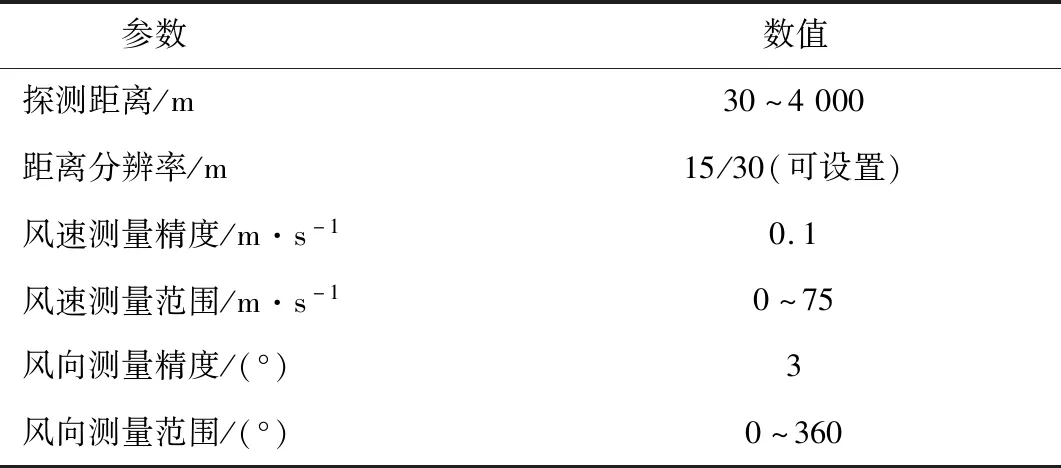
表1 扫描式激光雷达的参数表
采用激光雷达的PPI扫描模式进行海上风电机组功率曲线测试的原理图如图1所示。

图1 激光雷达的PPI扫描模式测量原理图
其中扫描角度α的范围和径向风速测量点的数量可根据需要进行设置,扫描仰角θ需根据目标位置的高度和激光雷达的安装位置计算得到。综合考虑激光雷达的测量效率和精度,测试时将α的范围设置为60°,并在目标位置的同一层高均匀扫描测量7个点(如图1中V1~V7)的径向风速,然后通过VAD反演计算得到目标位置的水平风速和风向。
扫描式激光雷达还提供了温度、湿度和大气气压等测量仪器的通信接口,配合外部安装的仪器可同步采集对应的气象数据。
2 功率曲线测试系统
结合功率曲线测试的具体要求设计了一套基于扫描式激光雷达的功率曲线测试系统,主要包括风速、风向、大气温度、大气湿度、大气气压和净有功功率(电流和电压)等参量的测量以及相关机组状态信号的采集,如图2所示。

图2 功率曲线测试系统组成
风电机组轮毂中心高度处的水平风速和风向通过扫描式激光雷达进行测量,风速精度为0.1 m/s,风向精度为3°。大气温度、湿度和气压通过温湿压一体计进行测量,将其安装在激光雷达附近并接入激光雷达系统与风速风向同步采集数据,数据处理时将结果换算至轮毂中心高度。风电机组的净有功功率通过功率变送器进行测量,功率变送器精度为0.5级。采用三个电流互感器对机组的每相电流分别进行测量,测量点设在机组净功率输出位置,电流互感器精度为0.5级。对于大多数低压侧为690 V的风电机组,本系统可直接在机组低压侧进行电压采样,无需额外安装电压互感器。此外,数据筛选时所用的机组并网、限功率运行、可利用等状态信号,以及数据校验时所需的机组SCADA功率,风轮转速、偏航角度、桨距角等参量直接从机组控制器引出至数据采集系统。净有功功率和机组状态信号对应的数据采集系统与激光雷达系统通过GPS校时保证数据同步。
3 功率曲线测试试验
本试验介绍采用上述测试系统进行海上风电机组功率曲线测试的方法,并分析测试结果的准确性。
3.1 测试场地地形及测试扇区评估
测试场地位于我国南方某海上风电场,周边为平坦海面,距离被测机组20倍叶轮直径范围内无大型岛屿,因此无需进行场地标定[1]。被测机组及其周围机组的布局如图3所示,其中T1为被测机组,测试风场的主风向为东北风向。通过计算得到T1机组的无尾流影响扇区为[349.7°~0°]和[0°~291.2°],将激光雷达置于主风向并安装固定在T1机组塔底外部的钢平台上,采用PPI扫描模式测风,扫描角度α的范围设置为[15°~75°],每隔10°取一个径向风速测量点,风速测量目标位置选在距离T1机组2.5倍叶轮直径的轮毂中心高度处,经过计算得到扫描仰角θ为12.19°。由于目标位置的水平风速和风向是通过激光雷达扫描区域内7个测量点的径向风速反演计算得到的,所以计算测试扇区时需考虑周围运行机组对各径向风速测量点的影响。根据VAD反演算法的原理可知风向在扫描区域内时激光雷达的准确度较高,因此取扫描角度α的范围[15°~75°]作为测试扇区,如图3所示。

图3 机组布局及测试扇区
3.2 测风激光雷达性能验证
激光雷达是否适用于风电机组的功率曲线测试需通过与参考风速计的对比测试进行验证。对比测试以安装在测风塔上的风杯风速计作为参考,测风塔位于距离风电场约8 km的一个岛屿上,激光雷达安装固定在岸边的混凝土平台上,距离测风塔1.84 km,周围无遮挡,激光雷达和测风塔的位置如图4所示。参考风速计安装在测风塔80 m高度处,激光雷达采用PPI模式以参考风速计为目标位置进行扫描测量,激光雷达与参考风速计的高度差为78 m,经过计算得到扫描仰角θ为2.43°,扫描角度α的范围设置为[221°~281°],每隔10°取一个径向风速测量点。由于风向在扫描区域内时激光雷达的准确度较高,且风向相差180°时的测量特性相同,因此取扫描角度α的范围[221°~281°]和与其相差180°的扇区[41°~101°]作为测试扇区。激光雷达系统与测风塔数据采集系统通过GPS校时实现数据同步采集。

图4 测风激光雷达和测风塔的位置
测试数据处理成10 min平均值后对4~16 m/s区间的数据进行对比分析,把激光雷达与参考风速计在同一时间的测量值进行一元线性回归分析,结果如图5所示。从图中可看出激光雷达与参考风速计的风速相关系数为0.988,回归系数为0.987,符合测试标准的相关要求。

图5 激光雷达与参考风速计对比
3.3 数据采集、筛选、统计
测试期间保持机组正常运行且不更改机组的配置,数据筛选时剔除以下数据:
(1)测试扇区之外的数据。
(2)机组停机、故障、限功率运行时的数据。
(3)测试系统故障或异常时的数据。
(4)测风激光雷达显示的无效数据。
将筛选后的有效且连续的数据处理成10 min平均值,并统计到0.5 m/s间隔的BIN区间。
3.4 测风激光雷达测试一致性验证
采用激光雷达进行功率曲线测试时可在附近设置一个监控测风塔用以确保其测试的一致性,但由于在海上单独建造测风塔的成本较高,本试验在功率曲线测试结束后按照测试前激光雷达性能验证的方法与测风塔上的参考风速计重复进行一次对比测试,通过比较前后两次测试结果来验证激光雷达测试的一致性。测试数据处理成10 min平均值后对4~16 m/s区间的数据进行对比分析,把激光雷达与参考风速计在同一时间的测量值再次进行一元线性回归分析,结果如图6所示。从图中可看出激光雷达与参考风速计的风速仍保持较高的相关性,相关系数为0.981,回归系数为0.984,与功率曲线测试前的值变化不大,这表明激光雷达在功率曲线测试前后保持着良好的测试一致性,可认为在功率曲线测试期间激光雷达的测量结果是准确可靠的。

图6 测试后激光雷达与参考风速计对比
3.5 测试结果及分析
功率曲线测试数据经筛选后得到有效数据1 253组,风速范围为2.4~16.3 m/s,将测试结果换算至参考空气密度(1.225 kg/m3)并与机组的保证功率曲线以及基于机舱风速计法测得的功率曲线进行比较,结果如图7所示。从图中可看出基于激光雷达的测量功率曲线与保证功率曲线基本吻合。在3.5~4 m/s风速区间机组开始切入,由于机组自用电损耗占比较大,实测功率低于保证功率,平均偏差为-21.8 kW,偏差最大为-22.5 kW;在4~8.5 m/s风速区间机组升功率运行,实测功率高于保证功率,平均偏差为53.7 kW,偏差最大为123.9 kW;在8.5~11 m/s风速区间,实测功率低于保证功率,平均偏差为-88.7 kW,偏差最大为-199.4 kW,尤其在10~11 m/s风速区间机组将要达到额定功率而进行频繁桨距调节导致该处偏差值较大;达到额定风速后机组实测功率基本等于保证功率且保持稳定。

图7 测量功率曲线与保证功率曲线比较
由于测试场址变化、偏航对风误差以及叶轮尾流等因素的影响造成机舱风速传递函数的准确度较低,导致基于机舱风速计法的测量功率曲线与保证功率曲线的偏差较大,尤其是在10 m/s风速附近的功率控制区(额定风速附近的桨距角调节)和7 m/s风速附近的转速调节区(为避开机组共振)的偏差幅度较大。
总体上,基于扫描式激光雷达的测量功率曲线与保证功率曲线的吻合度明显优于基于机舱风速计法的测量功率曲线,这表明本功率曲线测试系统的准确性较好,同时也验证了采用扫描式激光雷达测风的方法进行海上风电机组功率曲线测试是可行的。
4 结论
(1)采用扫描式激光雷达进行海上风电机组功率曲线测试的结果与保证功率曲线吻合度较高,且明显优于基于机舱风速计法的测量功率曲线,验证了该方法的可行性。
(2)扫描式激光雷达与参考风速计在功率曲线测试前后的相关系数分别为0.988和0.981,两者始终保持着较高的相关性,表明该激光雷达具有良好的测试一致性。
(3)扫描式激光雷达在海上风电机组功率曲线测试中,采用PPI扫描模式测量自由流风速,无需建造单独的支撑平台,与传统的方法相比更为便利和经济。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
气象与环境科学(2021年4期)2021-08-27
海洋通报(2020年5期)2021-01-14
中国电业与能源(2020年5期)2020-06-16
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
能源(2018年6期)2018-08-01
能源(2018年6期)2018-08-01
能源(2018年8期)2018-01-15
