
基于冗余主从节点架构的飞行器遥测参数采集系统研究
2021-01-13 07:26陈玉坤
宇航计测技术 2020年6期
陈玉坤 梁 君 荣 刚 曾 发 李 恺
(中国运载火箭技术研究院,北京 100076)
1 引 言
飞行器遥测系统的性能指标对导弹和运载火箭的研制进程及费用具有直接影响,对飞行器性能的改进和提高具有重要现实意义。随着飞行器上各系统变得越来越复杂,对传输遥测参数的数量、种类、精度也提出了新要求[1]。数据采集系统是获取飞行器工作状态的重要手段,是遥测系统获得信息的源头,提高数据采集系统的可靠性、灵活性和重构性是十分重要的研究课题。
传统的飞行器上遥测系统的采集设备和供电设备分离,各采集设备使用自身晶振时钟采集和传输数据,承担信息汇总的中心节点可靠性不高,出现故障会造成数据采集系统瘫痪[2]。为有效解决上述问题,本文设计了一种具有冗余节点的高可靠器载遥测参数采集系统,通过状态监测和切权电路,可实现冗余节点之间的快速切换。该系统可避免多个采集通道之间的路际串扰影响,提高遥测参数的采集精度,环境适应性大大提高,对于工程应用具有一定的指导意义。
2 系统总体方案及工作原理
2.1 系统方案
基于冗余主从节点架构的飞行器遥测参数采集系统的构成包括中央处理器(主机、备机冗余)、采编单元、各种类型的传感器,系统组成原理如图1所示。传感器通过敏感元件感知被测参量的变化,通过传感器输出电压大小和被测参量的物理量建立某种对应模型[3];采编单元接收传感器输出的电压信号,为了提高信号准确度,依次进行滤除杂波、信号放大、采样、编码等处理,最终将模拟量变换为数字量。中央处理器通过时序信号控制采编单元的工作,在预先设置的时序内,采编单元向中央处理器输出数据,中央处理器接收后,暂时存储于数据缓存区,在下一个工作周期起始时,按照数据帧格式编排要求将并行数据转换为串行数据输出给具有调制和发射功能的设备,以无线方式进行数据传输。中央处理器由主机和备机组成,当主机和备机状态自检都正常时,默认为主机工作。
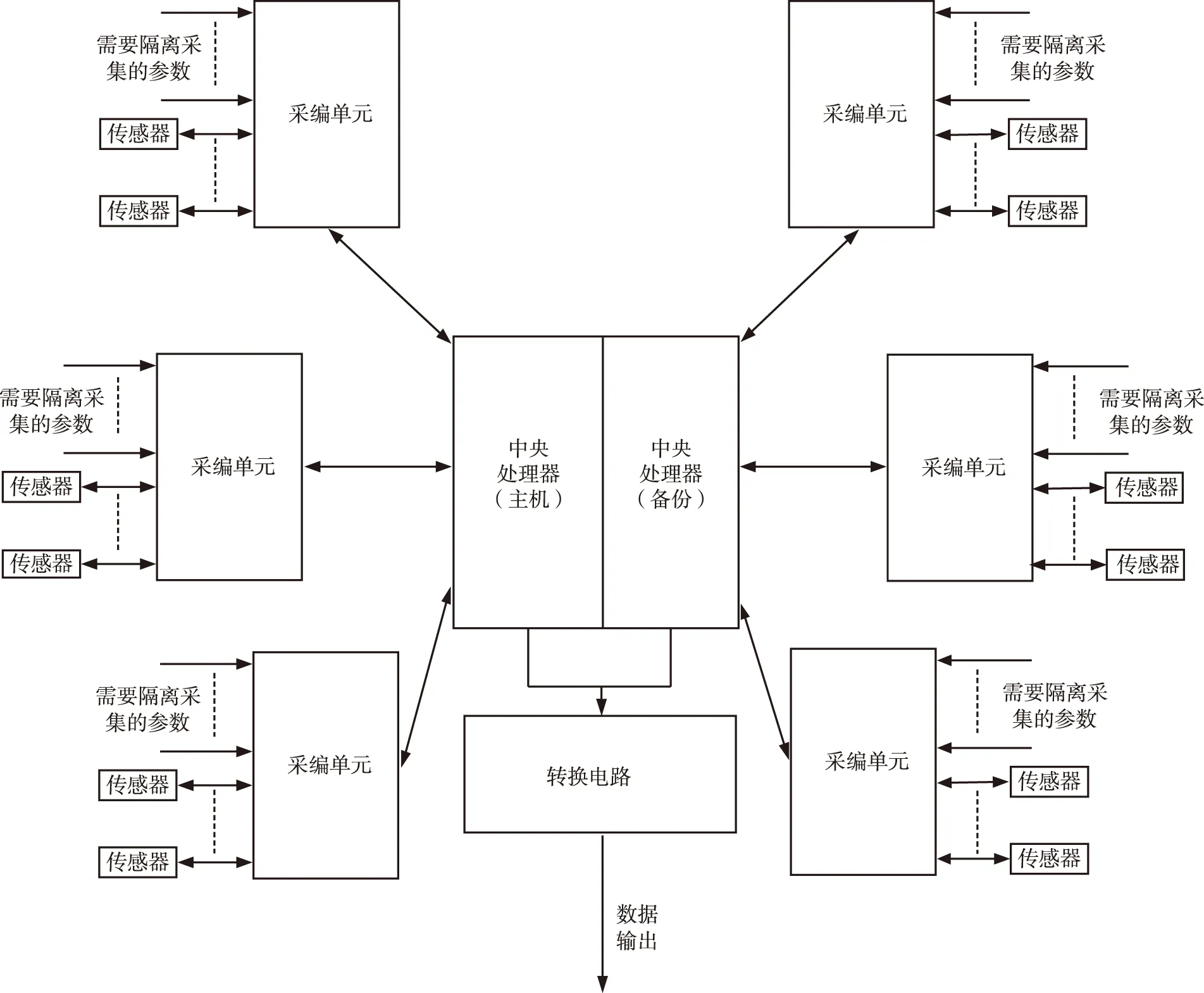
图1 系统组成原理框图Fig.1 Composition diagram of data collection system
2.2 工作原理
主从节点架构的设备连接关系如图2所示。设备1~设备n必须通过中心节点的转发才能完成信息交互。若该系统架构上连接的设备有n个(包括1个中心节点、n-1个从节点),则需(n-1)条信息链路才能保证任意设备之间正常通信,主从节点架构具有结构简单、维护方便等优点[4]。除中心节点之外的任一节点的故障不会影响其他节点之间的正常通信,但若中心节点出现故障,导致整个系统功能失灵,陷入瘫痪[5]。为了提高系统的可靠性和稳定性,中心节点通常采用冗余的工作模式。

图2 主从节点架构Fig.2 Master-slave redundant nodes architecture
在基于冗余主从节点架构的飞行器遥测参数采集系统中,中央处理器作为中心节点,各采编单元必须通过中央处理器的转发才能完成信息交互功能,某采编单元因为工作异常出现故障,仅影响该台设备的数据通信,其它正常工作的采编单元仍能通信,可对异常设备实现故障隔离。在飞行器设计和研制阶段,对遥测参数的测量需求会发生变化,由于传感器和采编单元可作为独立设备增加或者取消,只需对配套设备数量进行重新配置,无需对系统架构和设备功能组成进行重新设计,大大提高了系统的灵活性和方便性。为了提高该系统的可靠性,中央处理器设计了主机、备机热备份的工作模式,默认状态下主机的优先权大于备机,当主机工作异常,经过双机转换和切权电路判决,快速将控制权由主机切换至备机,实现系统在一度故障模式下仍能正常工作。
3 系统硬件设计
3.1 供电与信号采集模块
供电与信号采集模块为采编单元内部模块,完成自身设备供电、对传感器供电与信号采集功能。供电与信号采集模块包括两个电源芯片,一个用于采编单元设备自身的供电,一个用于给外部传感器供电。两个电源芯片独立工作、互不影响,即便外部某一传感器出现致命性短路故障,只是影响传感器供电部分,采编单元仍能正常工作。供电与信号采集模块与传感器的连接示意图如图3所示,供电与信号采集模块与单个传感器通过同一束电缆分支同时实现了供电和采集功能,无需对传感器再额外配备供电设备,减少电缆网导线交叉,简化了配套设备的种类。
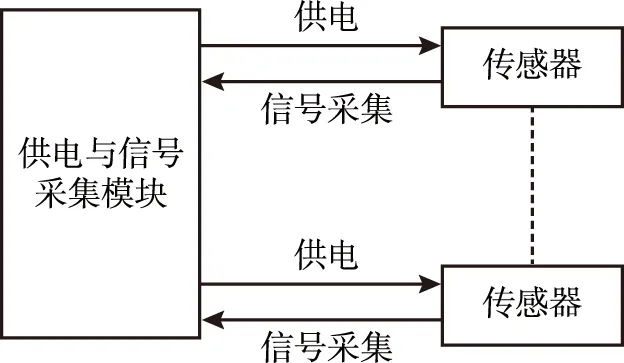
图3 供电与信号采集模块连接示意图Fig.3 Link diagram between power and signal acquisition module and sensors
用于外部传感器供电的电源芯片采用成熟的DC/DC直流电源变换器,在(14~40)V范围的输入电压下可正常工作,具备输出+5V、±15V三种电压的能力,可满足绝大多数场合的使用。为了抑制传导干扰,提高设备的电磁兼容能力,在供电电源和电源芯片之间插入滤波器。电源模块原理框图如图4所示,经过DC/DC直流电源变换器后,+28V输入电压转换为+5V、±15V的输出电压,提供外部各传感器使用。
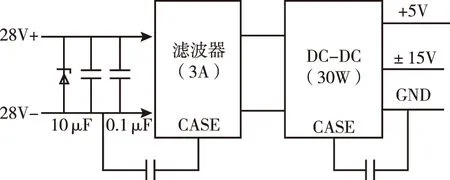
图4 电源模块原理图Fig.4 Principle of power module
3.2 隔离采集模块
隔离采集模块为采编单元内部模块,其组成包括多级放大器、光电耦合器、多路切换开关、A/D变换器,如图5所示。需要采集的信号依次经过第一级放大器进行阻抗匹配、第二级放大器进行电压信号放大、光电耦合器进行隔离、第三级放大器进行阻抗匹配,在进行完信号预处理之后[6],确保信号进入多路切换开关、A/D变换器时为低阻抗状态,避免在高码率传输状态时遥测参数的快速切换而导致的路际干扰,提高电路的采集精度。

图5 隔离采集组成框图Fig.5 Composition diagram of isolated acquisition
图6给出了隔离采集电路的具体实现方式,通过四级集成运算放大器组合、光电耦合器实现信号的阻抗匹配和隔离采集。第一级放大电路由第一放大器231与电阻R1、R2共同组成,第二级放大电路由第二放大器232与电阻R3~R5、电容C2组成,第三级放大电路由第三放大器234与电阻R6、电容C3组成,第四级放大电路由第四放大器236与电阻R7组成。为了进行信号的阻抗匹配,第一级放大电路的电阻R1,第四级放大电路的电阻R7使用0Ω短路线替代,运算放大器可实现电压跟随器功能。电压跟随器具有输入电阻高、输出电阻低、输出与输入同相位的特性[7],从而达到提高遥测参数采集精度的目的。

图6 隔离采集电路图Fig.6 Isolated acquisition circuit scheme
在某飞行器隔离采集的电路设计中,隔离采集信号的输入范围为(0~5)V,第一级、第四级放大器均作为电压跟随器使用,其电压放大倍数为1。第二级放大器与光电耦合器输入部分的光电二极管组成外部反馈电路,对通过发光二极管的信号起到调节作用,使发光二极管的光信号更加稳定。当光电耦合器输出部分的光电二极管接收到光信号后,第三级放大器对接收到的信号进行放大和调节。第一级、第二级、第三级、第四级放大器均使用ADI公司的AD8675ARZ。多级运算放大器组合在一起,实现信号的阻抗匹配和逐级放大。
3.3 非隔离采集模块
图7给出了非隔离采集电路的具体实现方式,由多路切换开关[8]、放大器、A/D集成电路构成。多个无隔离采集要求的信号连接多路切换开关的信号输入端,多路切换开关按照控制信号输出指定波道的信号到运算放大器的正向信号输入端,运算放大器信号输出端与A/D集成电路的信号输入端相连,输出端信号同时通过电阻R31反馈到负向信号输入端,A/D集成电路的信号输入端通过电容C31接地实现滤除杂波,A/D集成电路的信号输出端为8bit的并行数据,之后通过GM8164芯片完成并行数据到串行数据转换,按照中央处理器的时序控制,在预定的时间内以串行方式实现与中央处理器的通信。
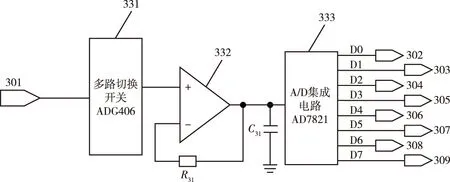
图7 非隔离采集电路图Fig.7 Non-isolated acquisition circuit scheme
非隔离采集电路的多路切换开关选用Analog Devices公司的成熟芯片,具体型号为ADG406,最大开关反应时间不超过150ns,可以支持8Mbps码率情况下对遥测参数的高频率波道切换[9]。A/D集成电路采用Analog Devices公司的8bit高性能芯片AD7821,其最大数据转换时间为700ns。输入模拟量经过采样和编码,完成模拟量到数字量的转换,最后通过数据总线完成数据读取。
4 系统软件设计
图8给出了数据采集传输系统工作流程图。中央处理器的主机和备机在上电后首先进行各自自身状态的检查,如果双机中的之一自检结果未通过,则置出错标志并再次进行自检,在三次内自检通过,则进入工作状态,若三次自检都未通过,则将该机从系统中隔离,直接使用自检通过的中央处理器;如果主机和备机均未通过自检,则默认使用主机工作,保证在最低限度下有一个当班机工作;如果双机均自检通过,主机和备机通过不同的数据传输通道,各自将自身的状态信息送双机转换和切权电路进行判断,从双机中决策出当权的中央处理器,在默认状态下主机的优先权大于备机,在本工作周期内,当权的中央处理器向系统内所有采编单元输出自身的数据同步信号和时钟信号,采编单元在数据同步信号和时钟信号作用下,各个采编单元在中央处理器分配的时间周期内输出采集与编码后的数据。当权的中央处理器接收所有采编单元的数据,按照预设的帧格式进行编排和组帧。在发送本帧数据之前,再次对自身工作状态进行判断,如果状态检查异常,说明当权中央处理器工作异常,丢弃本帧无效数据,同时跳转至中央处理器的双机自检流程进行判断,以便确定下一周期的当班机。如果状态检查正常,当班中央处理器送出本周期内组帧数据,之后转入下一周期的时序控制和数据汇总,无需再次进行中央处理器的自检流程。
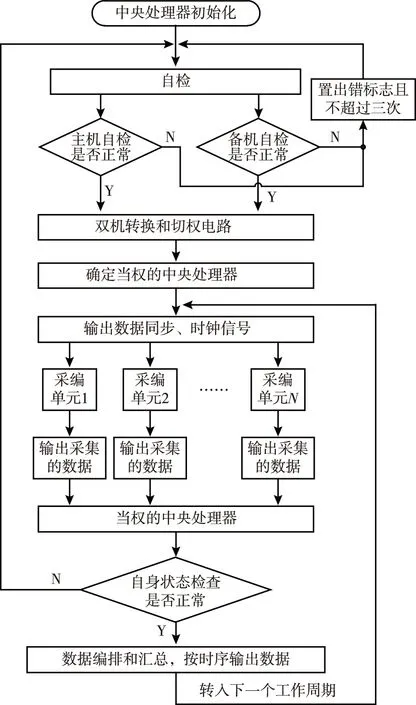
图8 数据采集传输系统工作流程图Fig.8 Flow diagram of data collection system in Single Circle
双机转换和切权电路采用“看门狗”机制的设计思路,其内部采用定时监控器配合相应的控制逻辑电路实现。双机转换和切权电路内有表征主机、备机各自工作状态的触发器,两个触发器相互独立。双机转换和切权电路的定时信号会置位触发器,而在主机、备机正常工作时,会定时发出复位信号将置位信号清零,故障单机不能正常发出复位信号,超出预置的时间后,对应的触发器不能被复位,会产生切换信号,对当权的中央处理器进行权限更换。如果主机、备机均工作正常,触发器不产生切权信号,默认主机输出作为采集系统输出,如果在某个工作时段内,主机、备机都处于异常状态(即两机都不能输出正常置位信号),则总是由主机输出,这样保证了在最坏情况下有一个当班机,从而避免了在主机、备机之间的频繁切换。
5 测试验证
依据奈奎斯特采样定理,为了不失真的恢复某模拟量信号,防止频谱出现交叉和混叠,对于信号的最低采样频率应该不小于该信号最高频率fH的2倍[10]。由于实际滤波器频率特性不可能是理想矩形,需要考虑一定的保护频带,工程实现上一般按照信号最高频率分量的3~4倍进行采样。采样频率越高,需要传输的数据码率就越高,容易导致误码率偏高和遥测精度恶化等问题,因此在能不失真恢复遥测信号的前提下,尽可能降低数据传输码率。
在飞行器试飞阶段,为了尽可能获得遥测数据,遥测参数的形式多样。数据采集传输系统除了需要采集温度模拟量、力学环境参数模拟量等之外,还需要采集开关量、图像数据、数据量、1553B数据等内容[11]。某飞行器需要传输的遥测参数统计如表1所示,可见在满足采样需求的前提下,各种遥测参数的采样频率差别较大,缓变信号的采样率只需40Hz,而某些速变信号的采样频率需要高达8000Hz。
根据表1所示的遥测参数数量和采样频率,经计算其数据容量达到了8Mbps,同时对具有隔离采集要求的双机冗余采集传输系统进行了故障注入测试,测试结果表明:为了避免不同系统之间的相互干扰,外系统传输的电压信号进行隔离采集,信号之间、信号参考地之间的绝缘电阻均小于200MΩ,同时采集精度优于1.5%。中央处理器采用主机、备机热备份的工作模式,通过注入故障让主机失效,经过双机转换和切权电路判决,当班机可由主机切换为备机,实现系统在一度故障情况下正常工作,避免系统瘫痪。波道切换前后电压转换波形如图9所示,在8Mbps的高码率传输情况下,多路切换开关在切换前输出的采集通道电压稳定值为3V,当切换到下一个采集通道后,多路切换开关输出的采集通道电压稳定值为0V,两个采集通道的电压高达3V,通过电压跟随器的阻抗变换,在采集通道切换后约0.2个采样周期即可快速达到稳定电压值,避免了在高码率传输状态时波道之间的路际干扰。
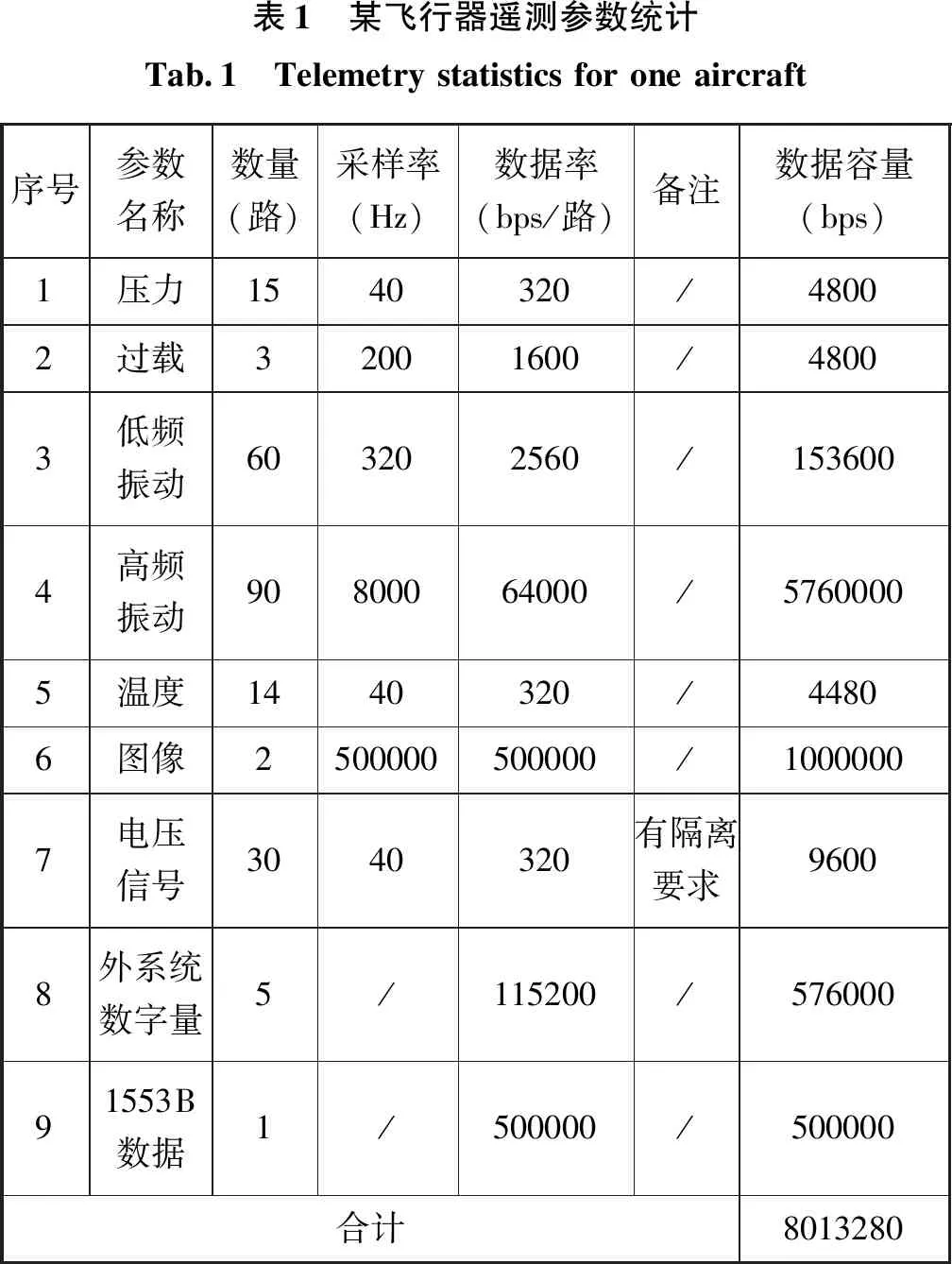
表1 某飞行器遥测参数统计Tab.1 Telemetrystatisticsforoneaircraft序号参数名称数量(路)采样率(Hz)数据率(bps/路)备注数据容量(bps)1压力1540320/48002过载32001600/48003低频振动603202560/1536004高频振动90800064000/57600005温度1440320/44806图像2500000500000/10000007电压信号3040320有隔离要求96008外系统数字量5/115200/57600091553B数据1/500000/500000合计8013280
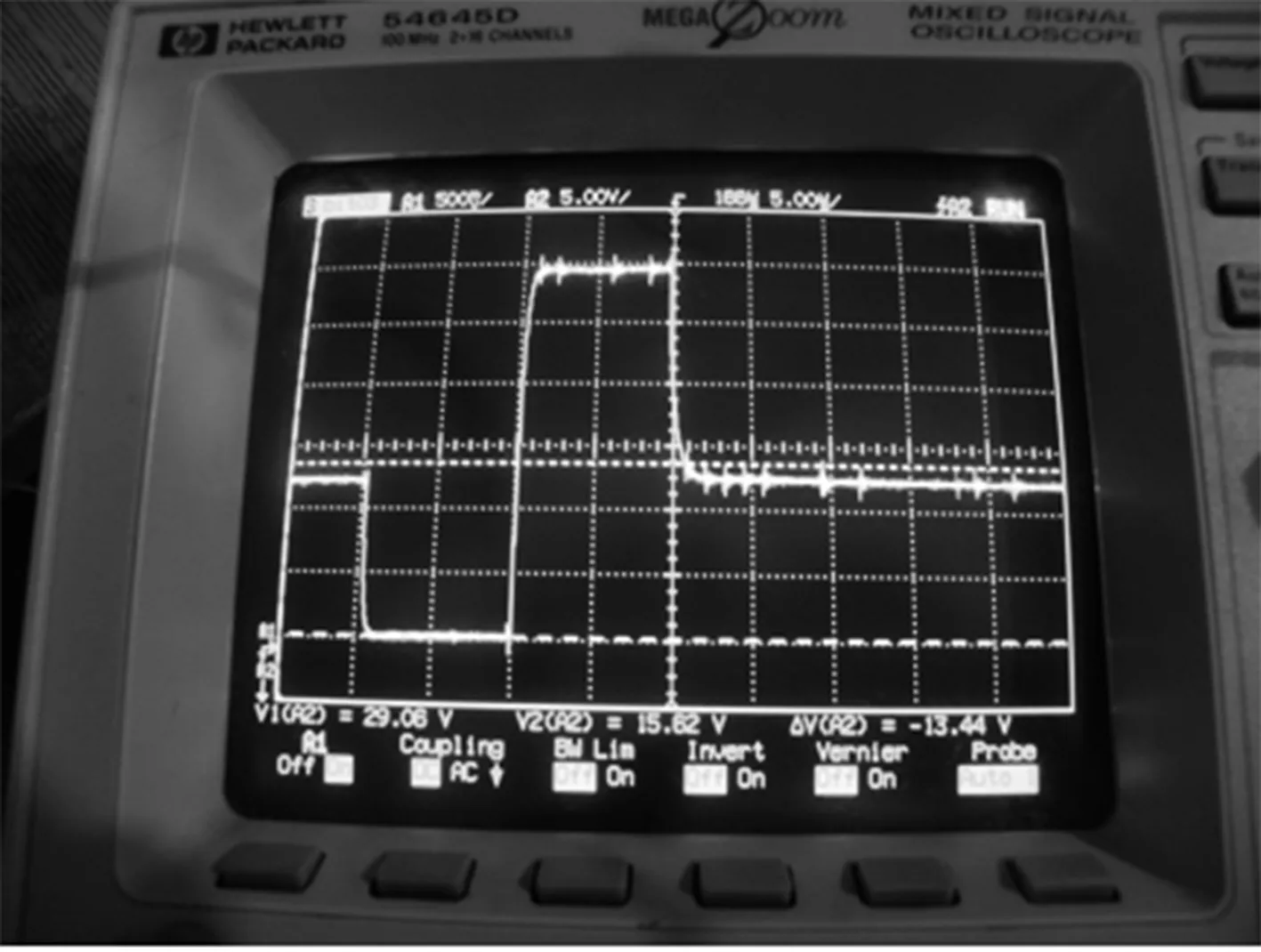
图9 波道切换前后电压波形Fig.9 Voltage waveform of collection channel transform
6 结束语
基于冗余中心节点架构思路,本文设计了一种高可靠的飞行器遥测参数采集系统,承担信息汇总功能的中心节点采用双机热备份,通过对主机和备机自身状态实时监测,在出现故障时经自主判别和切换,可实现控制权快速切换,提高了系统的可靠性和重构性。测试结果表明,该系统能有效地满足航天飞行器数据隔离采集、故障隔离与系统重构的要求,在一度故障情况下避免系统瘫痪,提高了系统的可靠性和稳定性,在高码率传输情况下减少采集通道快速切换前后的路际干扰,提高了电路的采集精度,具有较好的工程参考意义。
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
导弹与航天运载技术(2022年2期)2022-05-09
电子乐园·上旬刊(2022年5期)2022-04-09
探测与控制学报(2022年1期)2022-03-21
计算机测量与控制(2021年9期)2021-10-08
高考·中(2020年2期)2020-09-10
计算机测量与控制(2020年3期)2020-04-07
理科考试研究·初中(2017年4期)2017-11-04
现代电子技术(2009年7期)2009-06-25
航空知识(2001年5期)2001-06-12
