
大视场超紧凑探测光学系统设计
2021-01-12 08:35马子轩李旭阳任志广褚楠清
光学精密工程 2020年12期
马子轩,李旭阳*,任志广,褚楠清
(1. 中国科学院 西安光学精密机械研究所 空间光学技术研究室,陕西 西安710119;2. 中国科学院大学 光电学院,北京100049;3. 陕西师范大学 物理学与信息技术学院,陕西 西安710119)
1 引 言
探测光学系统应用广泛,灵敏度与时效性是其重要的性能指标。大孔径的设计可以提高系统接收的光照度,进而对微弱目标发出的光更加敏感,提高探测灵敏度;大视场的设计可以提高系统同一时间内的可探测范围,提高探测时效性;大相对孔径的设计可以提高系统的分辨率和像面照度,缩短曝光时间,从而提高探测灵敏度。因此,大孔径大视场大相对孔径是探测光学系统的设计趋势。
1941 年,马克苏托夫制成了由负弯月形厚透镜和球面反射镜组成的望远镜系统,并以他的名字命名。1957 年,葛利格里报道了马克苏托夫-卡塞格林望远镜的设计方法,在马克苏托夫望远镜的基础上结合卡塞格林式进行了改进。马克苏托夫望远镜由于其结构简单,所有表面均为球面易于制造,且在同样的口径和焦距下镜筒长度短,集光能力强等优点而被广泛应用于天文、工业和航空航天等领域。它作为相机物镜,在校正像差的基础上可以大幅度缩短系统总长。
二次曲面、高阶非球面和自由曲面具有优秀的像差校正能力,但非球面对于光学系统的加工、检测和装配提出了更高的要求,而球面镜在光学加工、检测及装配中的难度相比于非球面镜来说非常低,所以在满足系统指标的情况下会尽可能采用球面镜。本文基于以上两点设计了星载大视场全球面的紧凑型同轴探测光学系统。该 系 统 拥 有280 mm 的 孔 径 ,15° 的 圆 视 场 和1/1. 18 的相对孔径,能对14 等星进行探测,具有探测性能优秀、灵敏度高、时效性强及加工装配要求低等优点。
2 光学系统原理与结构
2.1 马克苏托夫物镜
马克苏托夫物镜由弯月形透镜与球面反射镜组成。弯月形透镜主要用于抵消球面反射镜带来的球差,增大弯月形透镜的厚度不会引进色差[1]。光阑和弯月形透镜的位置接近反射镜的球心,系统产生的轴外像差比较小,适当的改变透镜和反射镜的光焦度分配,通过间隔的变化还可以校正正弦差[2]。马克苏托夫物镜的结构如图1所示。
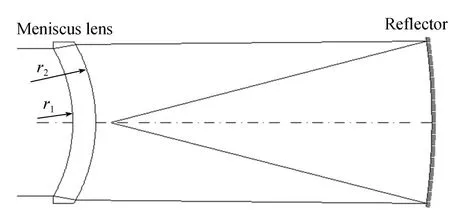
图1 马克苏托夫物镜Fig. 1 Maxutov objective lens
其中,弯月形透镜消色差条件[3]为:

式中r1,r2为弯月形透镜两个表面的曲率半径。
2.2 初始结构选型
大视场光学探测系统通常有全反射式、折返式和透射式三种形式。全反射式光学系统不存在色差,由于同轴反射式系统存在中心遮拦,多采用离轴反射式系统,但离轴反射式系统的装调难度高。透射式光学系统中透镜对不同波长光的折射率不同从而产生色散,二级光谱难以校正且系统焦距较大需要大量轴向空间,不利于紧凑型系统的设计。受玻璃材料光学特性的限制,大口径系统难以找到合适的玻璃材料,光学设计和加工也较难实现[4]。折返式光学系统是透射式与全反射式之间的一种结构形式,它相比于透射式系统结构更简单,轴向总长更小,相比于全反射式光学系统装调难度大大下降。基于以上以及对系统整体探测性能及系统加工装调难度的考虑,本文采用同轴折返式光学系统。将马克苏托夫物镜与卡塞格林结构相结合,选用马克苏托夫-卡塞格林望远镜的设计形式,通过两反结构折叠系统光路,大幅缩短轴向长度的同时使整个系统拥有较小的色差,利用透镜组校正反射镜带来的像差。
马克苏托夫望远镜在反射镜组前拥有一片透镜校正孔径像差。本设计中由于两个反射镜都采用球面镜的形式,球面反射镜不存在色差但会造成较大的球差、彗差、切向像散和匹兹伐模糊,需要透镜组进行像差校正。且由于系统大孔径和大视场的原因,整个光学系统的孔径像差与视场像差都较难校正,将前置透镜增加镜片为透镜组,提高孔径像差校正能力,同时在反射透镜组后添加后置透镜组,校正视场像差。
为了压缩系统轴向总长,将反射镜次镜与前置透镜组的最后一片透镜的后表面设计为统一曲率半径,之后仅需要在前置透镜组最后一面内镀反射膜即可实现次镜的作用,并使结构更加紧凑。最后得到系统的初始结构如图2 所示。

图2 系统初始结构Fig. 2 System initial structure
考虑到超紧凑设计,初始结构中后置透镜组的两反结构内要节省轴向空间,同时严格限制移动范围保证后置透镜组不产生遮拦。
3 光学设计参数与结果
3.1 系统视场选择
系统视场角直接决定了系统的观测范围。在探测系统本身不旋转的情况下更大的视场决定着更大的探测范围,也就意味着探测系统更大的时效性。本文选择CCD231-84 E2V 光电探测器,像元数目为4 096 × 4 112,像元尺寸为15 μm × 15 μm。马克苏托夫式望远镜一般选用3°的视场角[1],本文为了扩大探测范围以提高时效性,选用15°的全视场角。由于本文设计的系统具有旋转对称性,所以仅选择4 个视点来追踪整个视场即可,如图3 所示。

图3 探测光学系统视场Fig. 3 Field of view of optical detection system
3.2 系统焦距计算及探测器视场
系统焦距计算公式[5]为:

其中:Y为探测器对角线长,f ′为系统焦距,ω为系统半视场角。计算得到f ′= 331 mm,探测器视场为10.60°× 10.65°,转换为圆视场后全视场角为15°。
3.3 系统入瞳直径计算
星等是衡量天体相对亮度的度量单位。星等数字越大,目标照度越小。星等的计算公式为:

其中:E0为零等星的辐照度,规定为E0=2.068 × 10-8W m2,Em为 目 标 在 系 统 入 瞳 处 的照度,m为目标星等值。
本文设计的系统预计实现对14 等星的探测,通过计算得到目标在系统入瞳处的照度为Em=5.195 × 10-14W m2。
系统捕获概率的计算公式[6]为:

其中:φ为正态分布随机变量的概率积分函数,Th为灰度直方图中谷峰对应的灰度级,δ为背景高斯噪声均值,μ为背景高斯噪声的均方差估计值,SNR为信噪比。计算可得,在PFA= 10-5,PD=95% 时,信噪比SNR= 5.91,所以取信噪比阈值SNRth= 6 对系统进行分析。
入瞳直径由入瞳处的照度和探测器的信噪比决定,经推导可得到入瞳直径的计算公式[6-7]为:

其中:τ为光学探测系统透过率,t为探测器积分时间,Eph为单个光子能量,QE为探测器量子效率,SNRth为信噪比阈值,B为非抑制杂光辐射在单个像元上产生的信号电子数,Nc为系统噪声,l1为像元边长,l2为单视场像点直径。由于系统存在遮拦,所以取τ= 0.5。考虑到目标运动,为避免拖影与像移造成的探测精度下降,取t=0.02。其他参数依据探测器性能参数确定,Eph=hc λ= 3.4 × 10-19J,QE= 80%,SNRth= 6,B=8,Nc= 3。将上述各值带入式(6)可求得系统的最小入瞳直径为225. 0 mm。
由于系统存在中心遮拦,实际入瞳的计算公式为:

其中:α0为系统面遮拦比,α0= 0.35。计算得到系统的最小入瞳为279. 1 mm,取D= 280 mm。
3.4 设计参数
依据系统设计要求,入瞳直径和实际条件,拟定合理的设计参数如表1 所示。

表1 探测光学系统的参数设计结果Tab. 1 Design parameters of optical detection system
3.5 设计结果
根据前文初始结构以及设计参数,利用光学设计软件进行系统优化和像差校正。由于需要良好的光学系统探测性能,所以着重通过点列图和包围能量分布为基准优化系统,最终实现系统能量良好集中,系统尺寸小、结构紧凑,如图4所示。
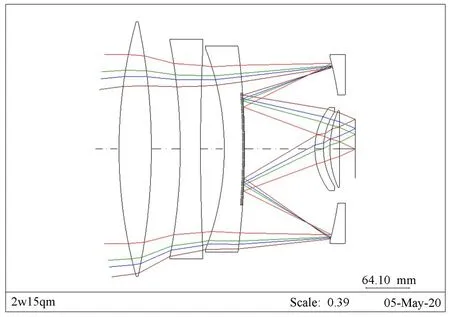
图4 探测光学系统结构Fig. 4 Structure diagram of optical detection system
4 系统分析评价
4.1 系统探测性能分析
该光学探测系统的探测性能由点列图、包围能量分布、场曲和畸变及畸变网格等指标进行评价。
为保证内插精度及探测器的有效探测,通常要求弥散斑80%~85% 的能量落在2×2 或3×3个像元范围内[8],因此本文选择弥散斑占据2×2个像元,探测器尺寸为15 μm×15 μm,系统点列图如图5 所示。

图5 点列图Fig. 5 Spot diagram
从图5 中可以看出,系统各视场弥散斑的均方根(Root Mean Square,RMS)直径最大值为30. 358 μm,基本满足弥散斑覆盖2×2 个像元的要求。
包围能量分布图可以完整地反映出系统能量弥散的位置,本系统各视场的包围能量分布如图6 所示。 由图6 可知,各视场能量都集中在25. 432 μm 包围圆内,小于两个像元尺寸,各个视场2×2 个像元大小内的包围能量分布均高于86%,系统能量集中度高。

图6 包围能量分布Fig. 6 Encircled energy distribution
场曲与畸变图和畸变网格可以直接地反映系统场曲与畸变在各个视场的大小与变化情况。本系统的场曲与畸变图和畸变网格分别如图7 和图8 所示。

图7 场曲与畸变Fig. 7 Field curvature and distortion

图8 畸变网格Fig. 8 Distortion grid
由图7 和图8 可知,系统各视场的最大场曲小于0. 07,最大畸变小于1%,场曲与畸变不影响系统的探测性能。
系统角测量精度的计算公式为:

其中p为像元大小。 计算得到系统角精度为9.35″。
综上可知,系统能量集中度高、测量精度高,探测性能良好。
4.2 系统公差分析
公差分析是合理分配系统中所有光学元件及光学机械元件的制造公差并进行性能误差预测,从而可靠地预估光学性能的期望水平,确保系统以合理的成本达到所要求的光学性能。在该系统的公差分析中,需要给所有光学元件分配合理的公差,使光学探测系统的探测性能达到要求,并使光学元件的成本、装配和校准的成本最低,从而使整个系统的性能达到最优。
该光学系统的公差参数包括透镜的厚度、倾斜、偏心、楔角、光圈、二维不规则度,空气间隙,材料的折射率和阿贝数等[9-10]。为了衡量光学系统的可行性,使用公差计算程序计算光学系统内各公差对光学探测性能的敏感度,并根据探测性能的要求和制造、检测和装配的能力确定光学系统的最终公差。
利用光学设计软件,按照经验以工艺上较宽松的条件给出探测系统各结构参量的公差预定值,如表2 所示。以第一面镜为基准,将光学系统的后截距作为补偿量,进行敏感度光学分析得到光学系统的80% 包围能量分布,如图9所示。对设计结果进行公差分析,找出特别敏感的公差,为按照预定公差得到的对探测质量影响较大的敏感公差并给出期望值,如表3 所示。对修改后的公差进行灵敏度分析,得到光学系统80% 包围能量分布预估,如图10 所示。
通过以上分析,光学系统的公差不仅可以满足探测要求,也可以满足光学加工、检测和装配的要求。

表2 预定公差Tab. 2 Predetermined tolerance

图9 预定公差下的80% 包围能量分布预估Fig. 9 Estimation of 80% encircled energy distribution with predetermined tolerance

表3 敏感公差Tab. 3 Sensitive tolerance

图10 80% 包围能量分布预估Fig. 10 Estimation of 80% encircled energy distribution
5 结 论
本文将改进的马克苏托夫望远镜作为初始结构,利用CCD231-84 E2V 光电探测器设计了工 作 于450~800 nm ,焦 距 为331 mm ,视 场 角2ω=15°,F/1. 18 的全球面紧凑型折返式探测光学系统,系统的轴向总长为350 mm。系统探测性能分析结果表明,该系统全视场在探测像元内的包围能量分布均高于86%,最大畸变小于1%,可以探测14 等星。该系统结构紧凑,探测性能良好,可用于目标的精确探测。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
科学技术创新(2021年25期)2021-09-11
重型机械(2020年3期)2020-08-24
东南大学学报(自然科学版)(2020年1期)2020-01-16
中国医疗设备(2019年1期)2019-01-15
摄影之友(影像视觉)(2017年10期)2017-11-07
综合智慧能源(2017年10期)2017-01-18
综合智慧能源(2016年1期)2016-02-03
中国铁道科学(2015年4期)2015-06-21
航天返回与遥感(2011年6期)2011-10-11
