基于SVM 和EKF的高超声速滑翔飞行器轨迹预报
2021-01-08 04:06:06程云鹏孙成志闫晓东
北京航空航天大学学报 2020年11期
程云鹏,孙成志,闫晓东,2,*
(1.西北工业大学 航天学院,西安710072; 2.陕西省空天飞行器设计技术重点实验室,西安710072)
与传统的弹道导弹武器相比,高超声速滑翔武器突防能力更强,飞行空域更大,同时具有战术和战略价值。美国于2019年大力推进基于通用高超声速滑翔体(C-HGB)的导弹型号研制项目,包括海军中远程快速打击(IR-CPS)项目[1]、陆军高超声速导弹(LRHW)项目和空军空射快速响应武器(ARRW)项目[2]等。随着高超声速滑翔飞行器(HGV)技术快速发展,这类武器已经给现有的导弹防御系统带来了现实威胁。
考虑到HGV具有高速、高机动的飞行特性,拦截该类目标通常只能采用迎击的策略,这就需要精确预测HGV的飞行轨迹得到预测命中点。由于防御方无法准确获得目标的先验信息,导致轨迹预报的精度较低。文献[3]分析了HGV的机动特性,探讨了考虑约束的飞行器参数变化规律和轨迹预测的可行性。文献[4]在目标不机动或加速度变化缓慢的假设下预测拦截命中点,但对于可以大机动飞行的高超声速滑翔目标,需要研究更适用的预测方法。文献[5]通过轨迹跟踪反解出控制参数,代入动力学模型来预报目标飞行轨迹,这种方法需要目标的先验信息且只能用于较短时间的轨迹预报。文献[6]将飞行器的轨迹建模为一系列简单的基本运动,与当前的轨迹匹配进而预测飞行器的机动,但这种方法仅适用于类似民航飞机这类机动方式有限且确定性强的合作目标。文献[7]将典型控制规律下的控制参数进行滤波辨识,重构控制律实现HGV的轨迹预报,但这种方法只对控制量符合建模假设的HGV轨迹具有良好的预报精度。
总结来讲,上述众多方法均致力于得到HGV轨迹的点估计值,从而建立控制量或加速度的回归模型,较少关注飞行器机动轨迹的其他统计特征,这就在建模过程中过度依赖当前单一轨迹的状态数据。当估计器不稳定或目标发生较大机动时,飞行轨迹的预报精度不高。
为了弥补以上不足,统计学习理论(SLT)[8]的快速发展为解决此类问题提供了新的思路。支持向量机(SVM)[9]作为一种数据驱动的方法,采用结构风险最小化以提高泛化能力。既有严格的理论基础,又可以较好地解决小样本、非线性和高维数等问题,因此参考机械零件剩余寿命预测[10]、快速公交行程时间预测[11]、风电功率实时预测[12]、卫星轨道预测[13]等工程问题,本文提出了将SVM 和扩展卡尔曼滤波(EKF)相结合的HGV轨迹预报方法。由于HGV的气动力是其实现大范围机动的主要因素,因此本文首先针对气动力持续作用的滑翔段机动动力学进行研究,分析了HGV滑翔段的机动模式。其次基于HGV的机动飞行特性,将目标的轨迹分解为纵向运动和侧向运动分别进行标定和识别,给出了HGV的运动行为识别框架。最后建立了地基单雷达EKF轨迹估计-SVM 运动识别-动力学轨迹预报流程。仿真结果证明了本文所提方法的适用性和有效性。
1 高超声速滑翔飞行器运动分析
1.1 高超声速滑翔飞行器动力学
假设地球为均匀圆球体,飞行器的侧滑角为零,考虑地球自转,在半速度坐标系下建立再入过程三自由度动力学方程[14]:
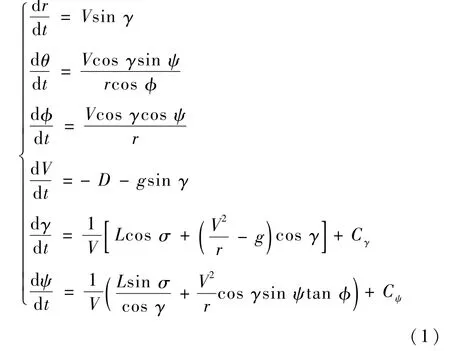
式中:状态量r、θ、φ、V、γ和ψ分别为目标地心距、经度、纬度、速度、航迹角和航向角;σ为倾侧角;g=9.81 m/s2;Cγ和Cψ为地球自转引起的附加项;在无动力HGV滑翔飞行过程中,空气动力的作用远大于重力的作用,而哥氏力和地球扁率的作用更小,可以忽略[15];L和D分别为升力加速度和阻力加速度,其表达式为
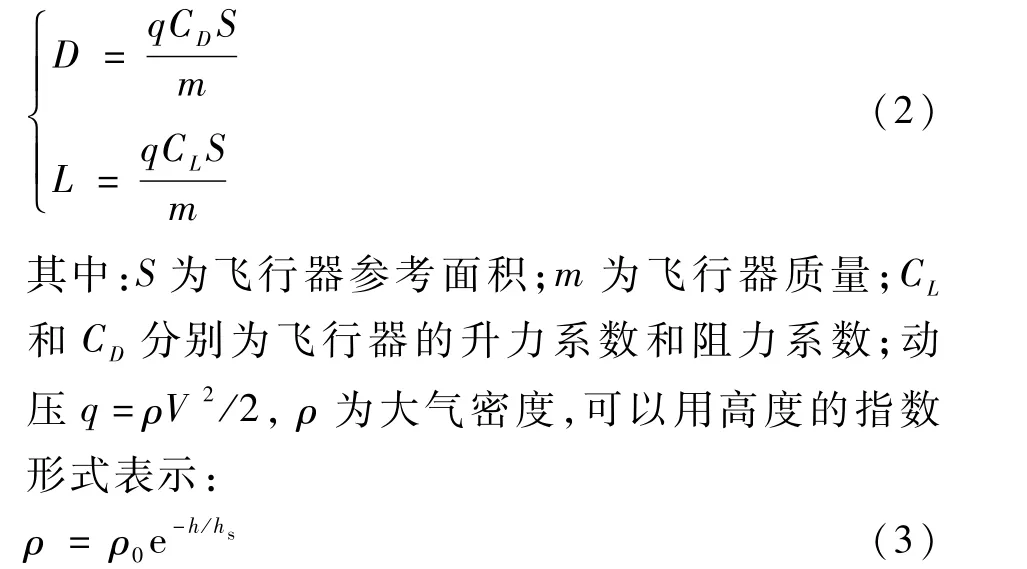
式中:海平面的大气密度为ρ0=1.225 kg/m3;目标飞行高度h=r-Re,Re为地球平均半径;hs为常值,hs=6700 m。
1.2 高超声速滑翔飞行器机动模式
面对称高升阻比滑翔飞行器一般选取迎角和倾侧角作为控制量。忽略控制耦合,可以将HGV的三自由度运动近似分解为纵向运动和侧向运动。
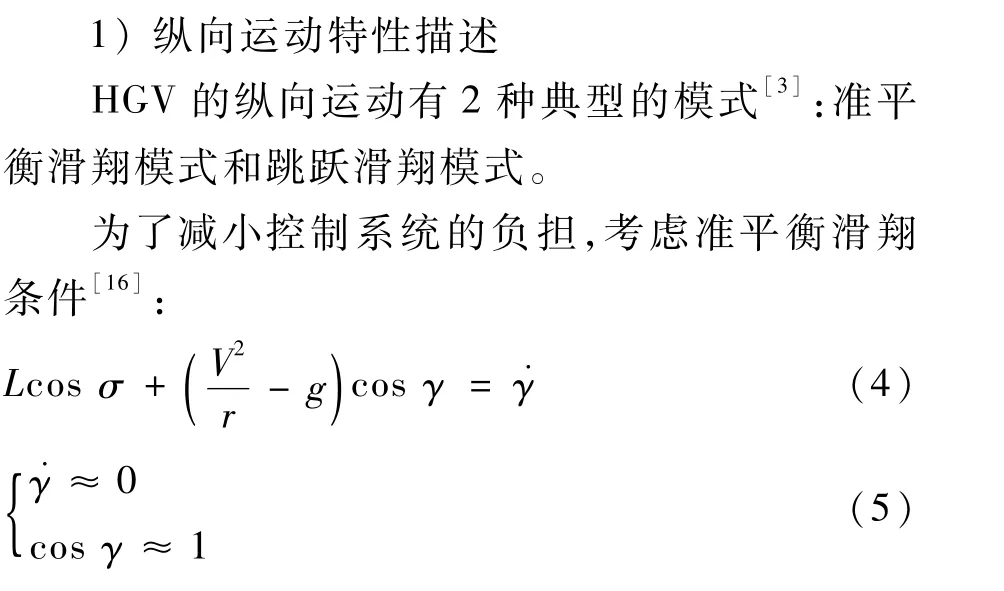
式(4)中的倾侧角由飞行任务剖面确定,迎角α隐含在升力加速度中,由式(4)和式(5)解算得到。
采用准平衡滑翔模式机动的HGV,在飞行过程中高度和航迹角的变化都比较小,这是准平衡滑翔模式区别于跳跃滑翔模式的典型特征。
在满足再入走廊飞行条件的前提下,只要迎角和倾侧角的设计不是始终满足准平衡条件,HGV都会呈现跳跃机动的模式[17]。与准平衡滑翔模式相比,跳跃滑翔模式可以实现更强的突防能力和更远的射程。工程应用中,控制量的设定需要满足再入走廊的限制条件,经常采用常值、分段或线性[18]等简单函数描述。由于相对短时间内控制参数的变化范围有限,可以将控制量近似为某一定值:

显然,一般情况下采用跳跃滑翔模式的HGV在纵向平面内所受的合力不为零。目标不同的迎角和升力的纵向分量所对应的高度、速度和航迹角呈现不同的周期性变化。因此,可以通过运动状态信息判定迎角和倾侧角信息。
2)侧向运动特性描述
HGV可以通过侧向机动增强运动的不确定性,从而提高突防概率。考虑侧滑角为零的情况,倾侧角变化对侧向气动力的影响决定了飞行器的侧向运动特性。
HGV的侧向机动主要有2种形式:①周期往复的侧摆机动模式;②倾侧转弯的机动模式。
对于第1种机动模式,将飞行器侧摆机动轨迹用基准曲线和正弦曲线[19]近似:

式中:z0(t)为侧向机动基准曲线,可以选取直线或者二次曲线等;lz(t)为机动幅值;ωz(t)为机动频率;ωz0为初始相位;x(t)为飞行器纵向运动距离。
因此,设计以上参数不同的变化规律可以得到相应的目标侧向机动轨迹。
应用动态逆的基本思想[20],将式(7)作为代数约束,对其关于时间进行二次微分,可以得到显式的侧向机动加速度控制量:
若HGV 的纵向运动规律确定,可以根据式(8)得到目标的侧向气动力。因此,侧向机动的幅值、频率和相位是确定HGV侧向运动规律的关键参数。
另一方面,对于采用倾侧转弯机动模式的HGV,可以在满足再入走廊的前提下,选取特定的倾侧角Cσ进行再入滑翔飞行。

采用这种机动模式的HGV可以在较长的时间范围内以最大升阻比飞行,从而减少飞行器的速度损失,纵向射程和侧向机动范围达到最大,机动能力最强。
2 高超声速滑翔飞行器机动分类
HGV的机动模式识别可以利用机器学习中的分类方法设计分类器,根据目标的运动特性实现对目标机动模式的识别。因此,分类器的设计是机动模式识别的关键。通过对HGV的运动分析,为目标的纵向运动和侧向运动分别设计分类器,令目标纵、侧向运动状态信息和机动模式标签一一对应。
2.1 纵向运动行为标定
不考虑HGV的侧向运动,用准平衡滑翔迎角αequi滑翔和固定迎角跳跃滑翔来匹配目标的纵向运动。对于采用准平衡滑翔模式飞行的情况,目标容易满足再入走廊的飞行状态约束,飞行器所承受的热流、动压和过载变化平稳,但是飞行弹道平直,易被防御系统拦截。为提高突防能力,飞行器破坏准平衡滑翔条件,使纵向平面内所受合力不为零,以实现飞行轨迹的纵向跳跃运动。在实际飞行中,较短时间内HGV的迎角变化幅度不能过大。考虑飞行器的迎角变化范围约束(0°≤α≤20°),将迎角离散化进行标定,纵向机动标签Labely如表1所示。
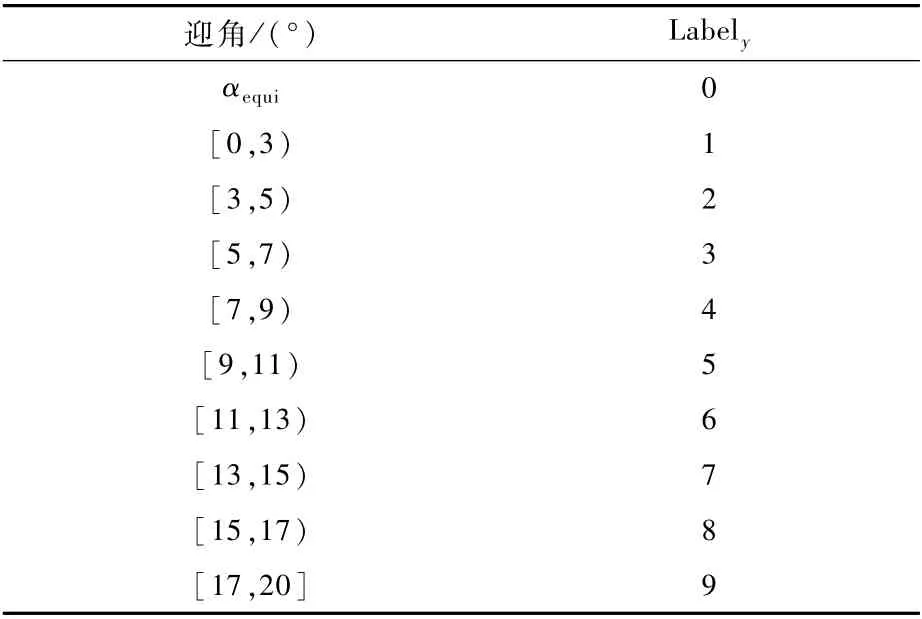
表1 高超声速滑翔飞行器纵向机动标签Table 1 Longitudinal maneuvering label of HGV
2.2 侧向运动行为标定
由1.2节可知,侧滑角为零的条件下,HGV的侧向运动状态可以分为无机动、正/余弦侧摆往复机动和倾侧转弯机动3种运动模式。
HGV侧向无机动的情况是指其在再入过程中都始终保持倾侧角为零的状态。采用这种方案飞行的飞行器可以获得最大纵向射程且控制律设计简单易行,但突防能力不足。侧摆机动可以大幅提高HGV的机动突防能力。目标采用侧摆机动方式时,需要满足再入走廊、控制系统和剩余能量等条件的约束。大量数值仿真结果表明,在30~50 km高度范围内飞行的HGV,侧摆机动幅值在750~2 750 m之间。将机动幅值离散化进行标定:lz∈[750,1 250)m,lz∈[1 250,1 750)m,lz∈[1750,2250)m,lz∈[2 250,2 750]m。对应的机动频率分别为:ωz∈(2π/337.5,2π/112.5]rad/km,ωz∈(2π/562.5,2π/337.5]rad/km,ωz∈(2π/787.5,2π/562.5]rad/km,ωz∈[2π/1 012.5,2π/787.5]rad/km,侧向机动标签Labelz1如表2所示。
除了周期性的侧摆机动,HGV为了达到最大侧向机动距离,或者为了实现对飞行路径上禁飞区域的规避,需要采用定倾侧角的方案飞行,称为倾侧转弯机动。类似地,考虑飞行状态和控制系统约束,将HGV的倾侧角离散化标定为:σ∈[π/9,π/7)rad,σ∈[π/7,π/5)rad,σ∈[π/5,π/3]rad,侧向机动标签Labelz2如表3所示。
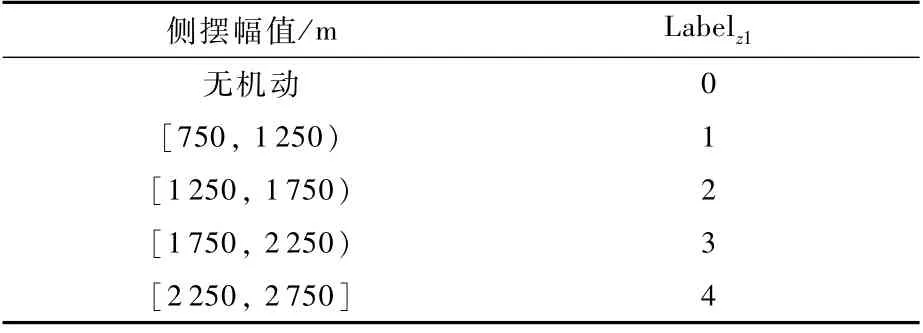
表2 高超声速滑翔飞行器侧向机动标签(1)Table 2 Lateral maneuvering label of HGV(1)
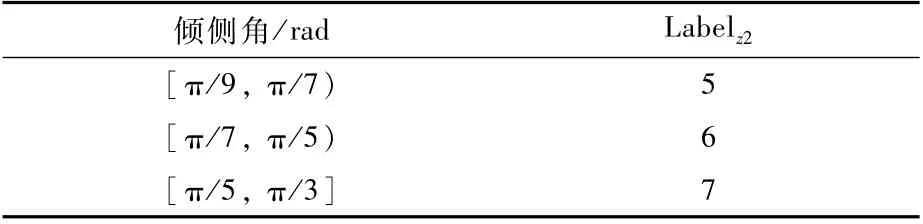
表3 高超声速滑翔飞行器侧向机动标签(2)Table 3 Lateral maneuvering label of HGV(2)
2.3 数据预处理
设定不同的初始条件和机动指令进行弹道仿真,得到如下训练数据信息:
HGV的侧向运动可以归纳为无机动、侧摆机动和转弯机动3种,通过每种运动特征来分类辨识这3种行为所对应的标签。与纵向运动分类识别问题类似,侧向运动分类器的输入数据格式为

通过对运动行为识别数据进行纵、侧向解耦和预处理,可以减小目标纵向和侧向运动之间的干扰并提高运动行为识别的准确性。基于此,分类器不仅可以辨识出目标采用准平衡滑翔或是定迎角跳跃滑翔的机动模式,还可以辨识出来袭目标短时间内的迎角和倾侧角指令变化邻域。
3 基于动力学模型的EKF轨迹跟踪
3.1 高超声速滑翔飞行器跟踪动力学模型
式中:μ为地球引力参数;r为地心距大小。
从式(13)可以看出,HGV在重力加速度g的作用下,表现为惯性弹道运动;在气动加速度a各分量的作用下,表现为机动再入运动。
定义αd、αt和αc分别为半速度坐标系沿3个轴方向的气动参数:
由式(15)可知,αd影响目标的再入速度;αt描述目标的转弯运动,αt>0时目标左转,αt<0时目标右转;αc描述目标的爬升或俯冲运动,αc>0时目标爬升,αc<0时目标俯冲。即高超声速滑翔目标的机动运动可以由αd及与αd相互独立的2个参数αt、αc描述。
气动加速度a的各分量Ax、Ay、Az可由气动参数和动压得到
3.2 高超声速滑翔飞行器EKF跟踪算法
对于高速高机动目标的状态估计问题,因为目标动力学模型的非线性和量测模型的非线性,目前工程上应用最广泛的是EKF方法。待估状态的数学模型可以表示为

式中:r为目标瞬时地心距;x、y、z分别为目标在ENU坐标轴上的分量;B为雷达站地理纬度。
采用混合坐标系对目标状态进行估计,即目标状态向量在ENU坐标系下描述,量测方程建立在雷达坐标系下,量测值为
式中:nR、nA和nE为雷达量测噪声,假设它们相互独立并服从均值为零的高斯分布。
EKF方法基于前一时刻的状态对当前时刻的状态进行预测,将k+1时刻的量测信息Yk+1与由式(23)计算得到状态输出Zk+1比较以修正待估状态量。EKF估计方程可以改为
4 支持向量分类学习
4.1 支持向量机方法
基于统计学习理论的SVM 方法是专门针对有限样本情况的,其目标是得到现有信息下结构风险最小化的最优解。SVM 方法已经广泛应用于故障诊断、回归分析、模式识别等领域。
假设给定训练样本集为

4.2 支持向量机轨迹识别训练
HGV的轨迹识别过程即建立飞行器机动控制参数与飞行状态之间非线性关系的过程。通过将先验的飞行状态和对应的机动控制参数标签组合,以建立训练样本集。飞行器状态为输入变量,标签(0/1)为输出变量。
SVM训练流程如图1所示。HGV弹道原始样本由CAV-H的再入段弹道数值仿真得到。将归一化的弹道数据分为训练和测试两部分,3/4的数据用于对SVM识别模型进行构建,1/4的数据用于对保存的SVM 识别模型进行测试。通过调整SVM模型的参数,直到满足要求,就可以获得适用于HGV轨迹识别的SVM有效模型。
需要说明的是:①虽然本文以长航程的面对称HGV为研究对象,但用于训练的弹道原始样本并不限定于某一特定的飞行器;②HGV弹道原始样本的选取原则是尽可能表征飞行约束内所有控制参数的取值情况,以提高方法的适用性和推广泛化能力。
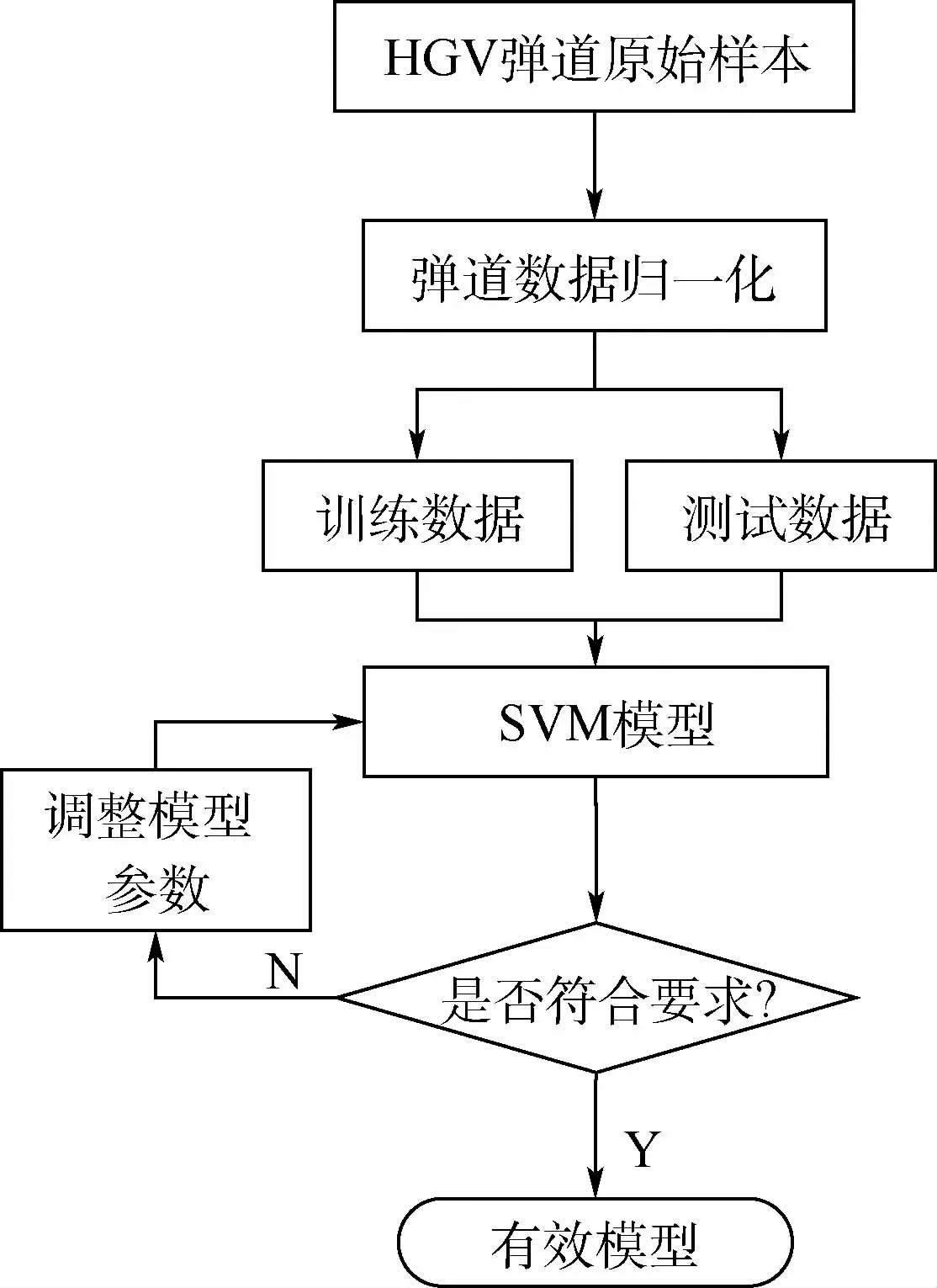
图1 支持向量机训练流程图Fig.1 Flowchart of training by support vector machine
5 基于运动识别的轨迹预报
HGV的轨迹跟踪是运动识别和轨迹预报的基础。传统的轨迹预报过程中,通常把气动力视为常值或拟合成简单函数,这往往导致轨迹预报结果的误差很大。因此,需要在轨迹预报的过程中,充分识别目标的运动行为,明确目标的运动方式,再结合飞行动力学实现轨迹预报。
基于典型运动参数识别的轨迹预报是指首先通过轨迹跟踪得到HGV的位置和速度信息,进而分类器根据估计信息辨识目标的运动行为得到弹道参数模型,最后结合HGV动力学实现对目标弹道的动态预报。具体流程如图2所示。
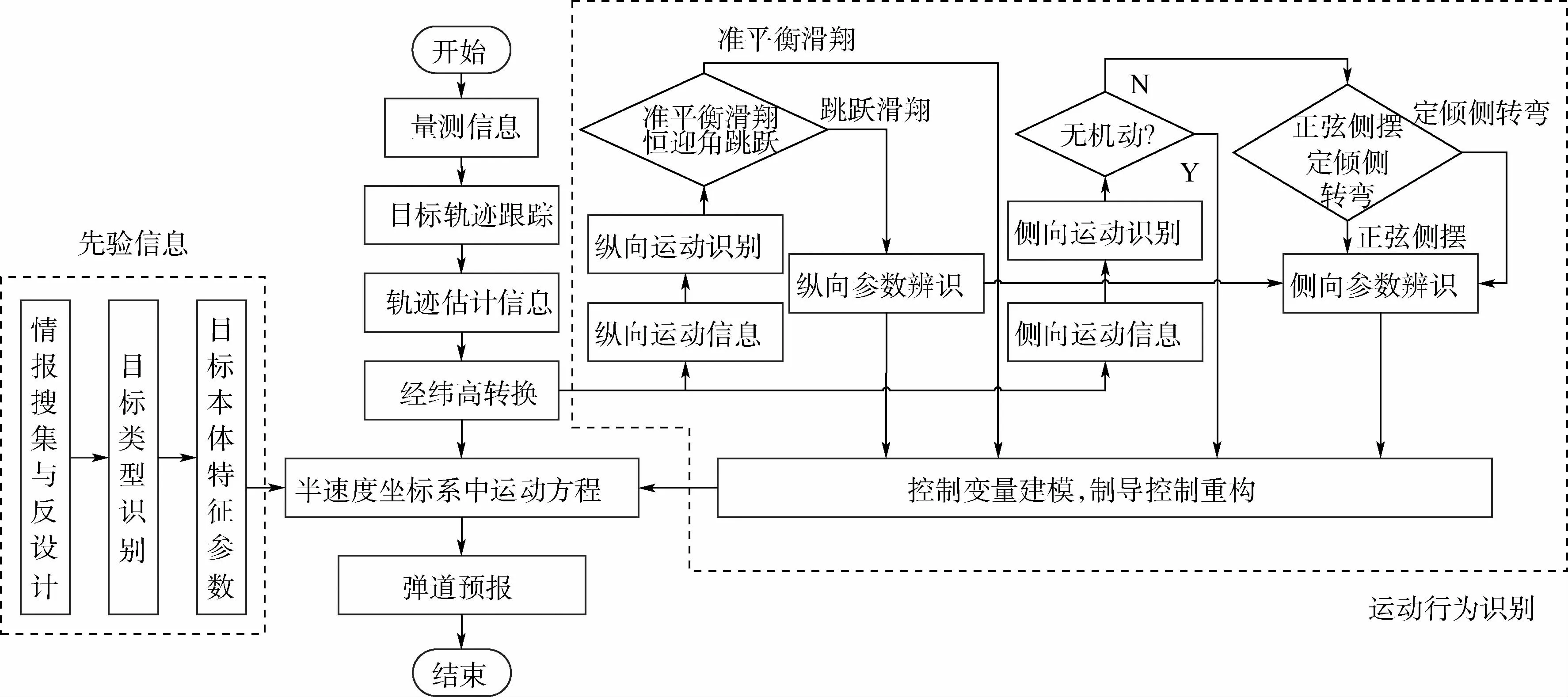
图2 高超声速滑翔飞行器运动识别轨迹预报流程图Fig.2 Flowchart of motion recognition based trajectory prediction for HGVs
SVM 分类器对HGV的纵向运动和侧向运动依次进行识别。对于HGV的纵向运动,判断目标是否采用准平衡滑翔模式飞行。如果是准平衡滑翔模式,则用准平衡滑翔参数化模型进行轨迹预报;如果不是准平衡滑翔模式,则用分类器辨识跳跃机动的典型参数范围,然后将典型参数传递到动力学模型中进行轨迹预报。对于HGV的侧向运动识别,判断目标是否存在侧向机动。如果HGV存在侧向机动,再辨识目标采用的是正/余弦侧摆机动或是倾侧转弯机动,进而辨识出对应的典型运动参数。HGV的纵向运动和侧向运动分类器都是通过离线训练学习得到。
基于典型运动参数识别的HGV轨迹预报分为以下几个步骤:
步骤1 训练数据处理。将不同轨迹类别的弹道数据作为历史信息,对弹道数据标定标签,按照式(11)和式(12)排列为列向量。
步骤2 SVM训练。基于步骤1中包含的飞行器纵向运动数据和侧向运动数据分别采用SVM进行分类模型训练,生成轨迹参数识别分类模型。
步骤3 诊断数据处理。根据雷达实时探测到的目标数据,采用EKF方法进行滤波,得到目标的跟踪结果。经过坐标变换,按照式(11)和式(12)排列为列向量。
步骤4 目标机动模式识别。基于步骤2生成的轨迹参数识别分类模型,为步骤3的诊断数据识别目标飞行器对应的控制变量模型。
步骤5 轨迹预报。将步骤4识别出的控制变量进行制导重构,代入HGV动力学方程进行轨迹预报。
6 数值仿真实验
本文以HGV(参考美国CAV-H)的再入段为研究对象,目标质量为907 kg,参考面积为0.48 m2。为了模拟更加真实的攻防对抗仿真环境,从进攻方的角度在弹道坐标系下设计滑翔飞行轨迹(初始高度45 km,初始速度5000 m/s,初始航迹角0°,初始航向角90°),再通过坐标转换得到球坐标系下的数据,最后加上量测噪声得到实验需要的量测数据。
假设将地基防御雷达的位置设在东经5°,南纬1°,雷达方位角的取值范围:A∈[-180°,180°),俯仰角的取值范围:E∈[0°,20°)。雷达与目标初始距离566 km,数据采样率1 Hz,径向距离量测标准差为100 m,方位角、俯仰角量测标准差为2×10-4rad。由于HGV一般航程较远,考虑到地球曲率,目标只有在当地水平面以上飞行时可被雷达观测到。
为检验本文提出的预报方法的有效性,考虑2种不同的目标运动轨迹,首先采用第3节所述方法对目标轨迹进行跟踪;然后基于跟踪数据,对比了SVM、BP神经网络[30]和朴素贝叶斯方法[31]对HGV运动模式识别的准确性;最后实现对高超声速滑翔机动目标的轨迹预报,并将预报结果与典型控制规律滑翔飞行器轨迹预报方法[7]进行比较。完成100次Monte Carlo仿真,验证跟踪和预报方法的稳定性。
算例1 HGV纵向采用准平衡滑翔模式飞行,侧向采用正/余弦侧摆机动模式飞行,侧摆机动幅值2 km,每个机动周期飞行540 km,初始相位90°。考虑飞行约束条件,设定迎角取值范围α∈[0°,20°],倾侧角取值范围σ∈[-60°,60°]。
图3给出了轨迹跟踪的位置估计均方根误差(RMSE)和速度估计均方根误差。可以看出,本文所述的跟踪方法可以实现对HGV的稳定跟踪。由于存在量测信息进行修正,位置滤波均方根误差在100 m 以内,速度滤波均方根误差收敛在5 m/s以内。
选取AUC作为衡量学习器优劣的性能指标,将算例1的跟踪结果构成诊断集,用SVM进行机动识别。由图4可以看出,在这一HGV的机动识别问题中,SVM方法比朴素贝叶斯方法的识别精度略高,但明显高于BP神经网络方法。
图5和图6分别给出了纵向平衡滑翔和侧向正/余弦侧摆机动的HGV轨迹预报结果与预报100 s时的空间误差散布结果。由图5可以看出,从345 s处的状态变量估计值为预报初始值,将SVM辨识出的轨迹典型参数重构得到控制输入,预报HGV的空间轨迹。由于HGV采用侧摆机动模式,倾侧角发生反转,基于典型控制规律的轨迹预报方法不能预报倾侧角的反转时刻,仍按照重构得到的倾侧角对飞行器进行控制,因此无法实现对这类机动滑翔目标的轨迹预报。而采用SVM运动识别的轨迹预报方法,可以通过对轨迹几何参数的辨识,间接实现对倾侧角反转时刻的预报,因此预报轨迹与真实轨迹接近。进行100次Monte Carlo仿真,图6给出了2种方法预报100 s时的空间误差散落点分布。采用SVM 运动识别轨迹预报方法的误差散布在15 km附近,而采用典型控制规律预报方法的误差散布超过20 km。
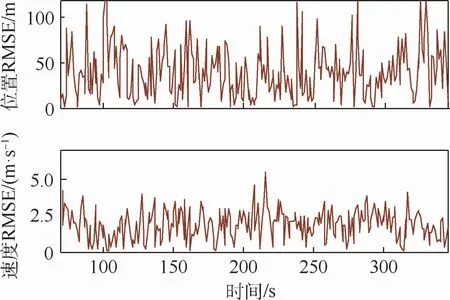
图3 准平衡侧摆机动轨迹跟踪均方根误差Fig.3 Trajectory tracking root-mean-square error for quasi-equilibrium pendulum maneuver
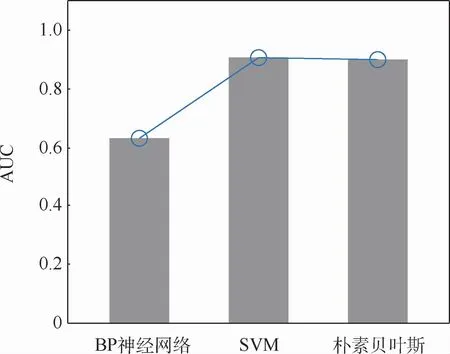
图4 AUC结果对比(算例1)Fig.4 AUC results comparison(Case 1)
表4给出了2种方法预报准平衡滑翔侧摆机动目标30 s、50 s和100 s时的位置误差统计平均值。相比典型控制规律滑翔飞行器轨迹预报方法,基于SVM-EKF运动识别的轨迹预报方法,在预报该类机动目标30 s、50 s和100 s时的位置精度分别可以提高18%、30%和44%。
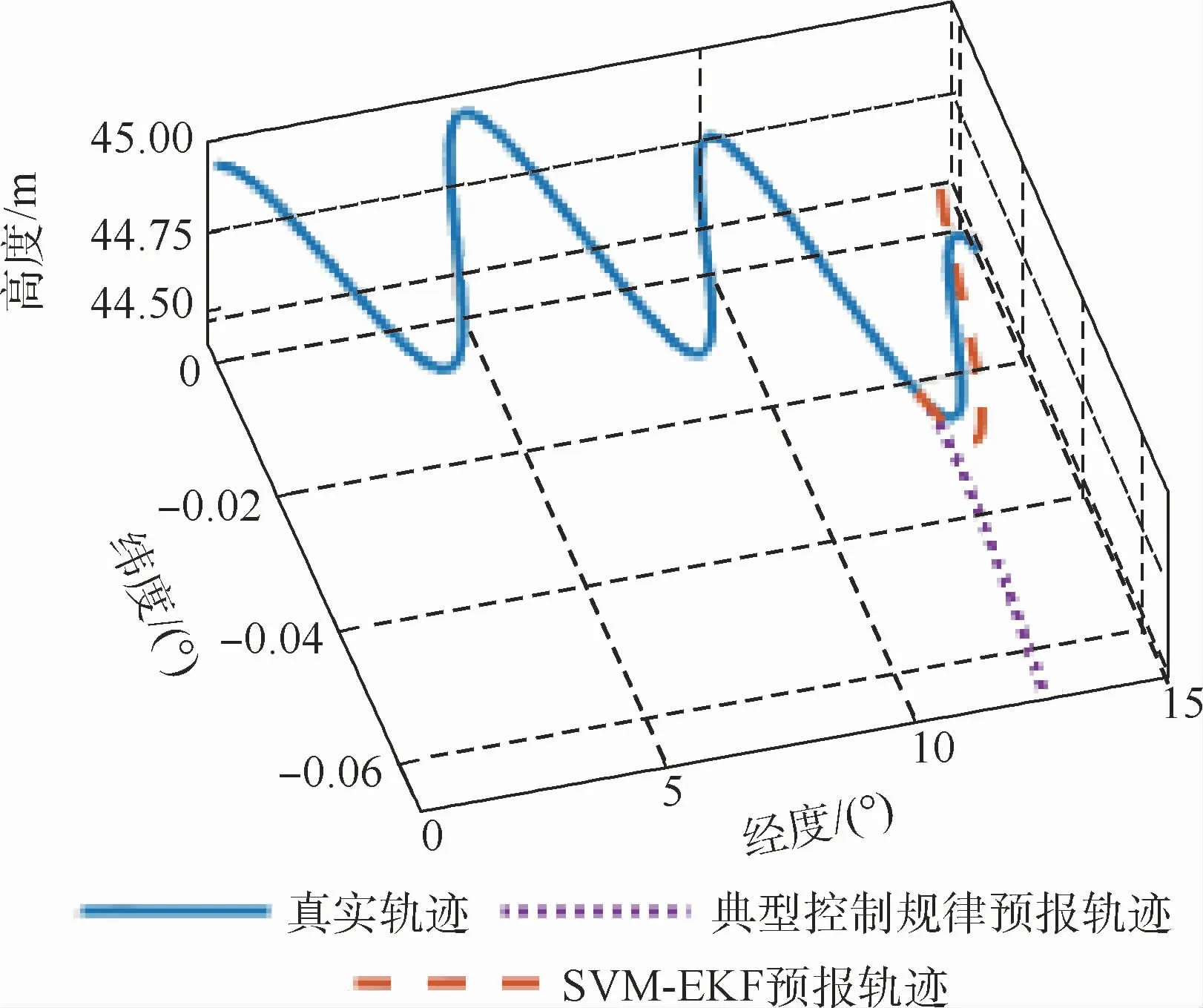
图5 准平衡侧摆机动轨迹预报结果Fig.5 Trajectory prediction results for quasi-equilibrium pendulum maneuver
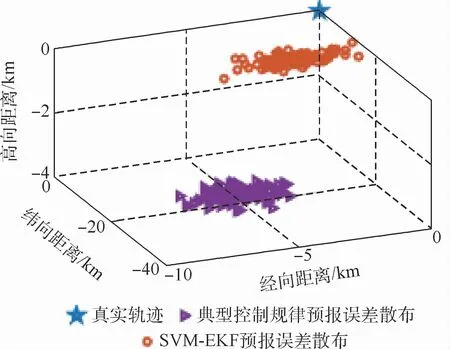
图6 准平衡侧摆机动轨迹100 s预报结果空间误差散布Fig.6 Spatial error distribution of 100 s trajectory prediction results for quasi-equilibrium pendulum maneuver
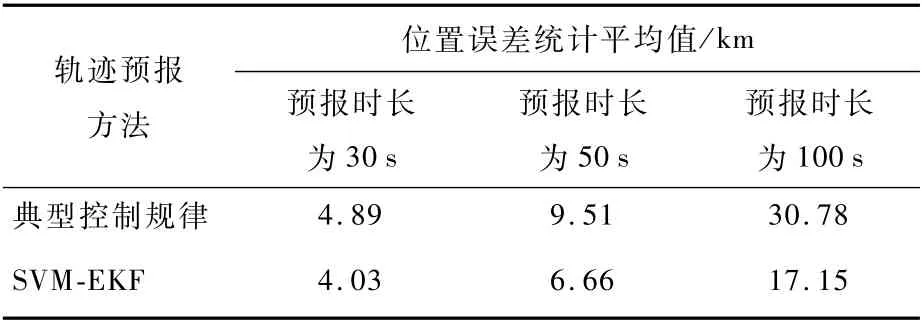
表4 准平衡侧摆机动位置预报误差统计平均值Table 4 Statistical mean value of position prediction error for quasi-equilibrium pendulum maneuver
算例2 HGV纵向采用恒迎角跳跃机动模式,侧向采用倾斜转弯机动模式飞行。同样地,考虑飞行约束条件,设定迎角取值范围α∈[0°,20°],倾侧角取值范围σ∈[-60°,60°]。
图7给出了本算例轨迹跟踪的位置估计均方根误差和速度估计均方根误差。同样的,跟踪方法可以实现对HGV的稳定跟踪。由于目标在倾侧转弯的同时还具有大幅的跳跃机动,因此速度滤波均方根误差会随着速度的波动而小幅波动,最终收敛在5 m/s以内,位置滤波均方根误差大约为100 m量级。
将算例2中HGV的轨迹跟踪结果组成诊断集,代入训练好的SVM进行机动识别。由图8可以看出,在这一算例中,SVM 方法的识别准确度显著高于BP神经网络方法和朴素贝叶斯方法。
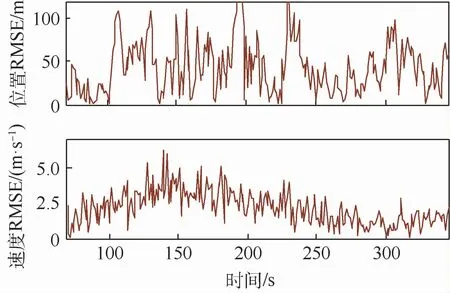
图7 定迎角转弯机动轨迹跟踪均方根误差Fig.7 Trajectory tracking root-mean-square error for fixed angle of attack turning maneuver
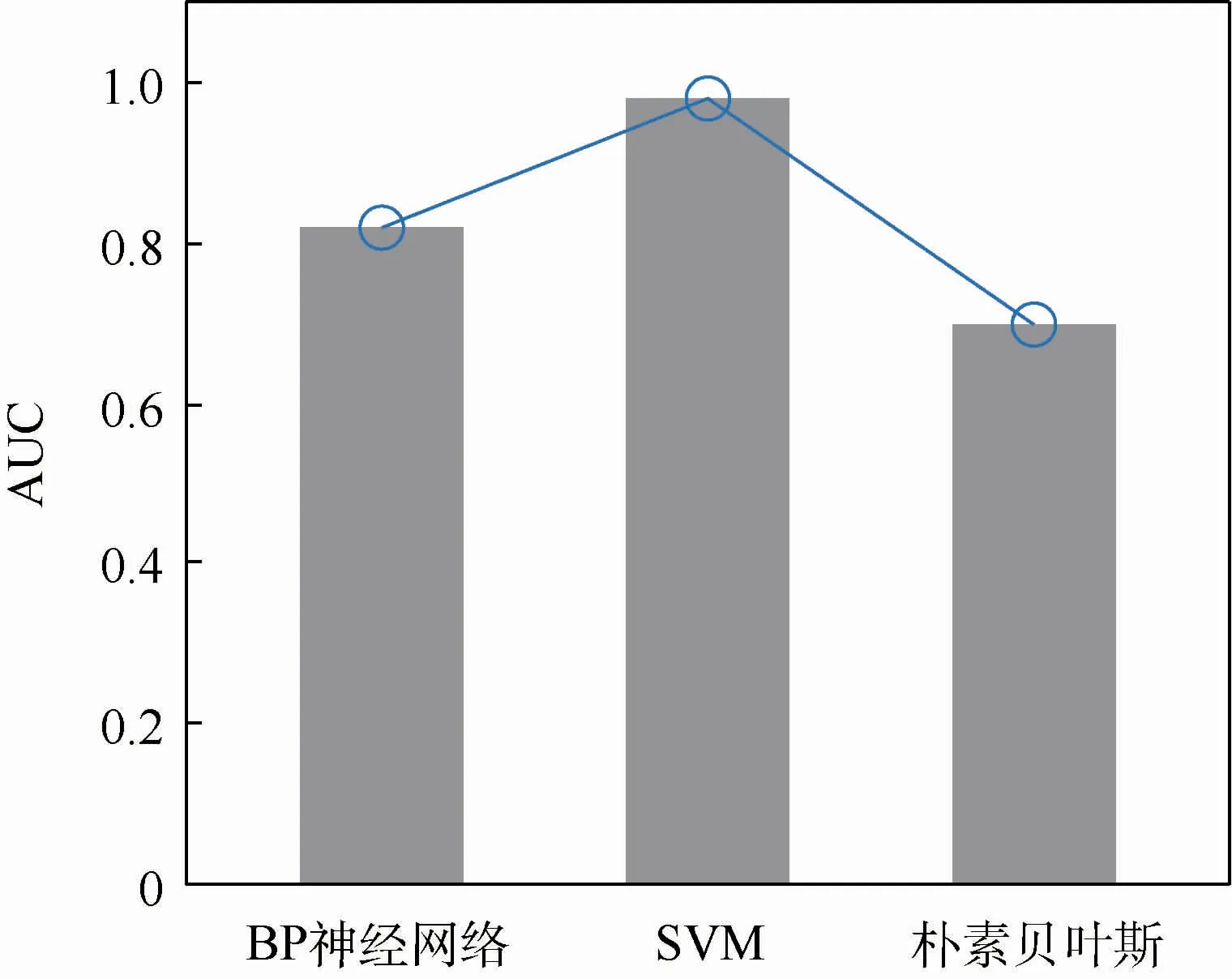
图8 AUC结果对比(算例2)Fig.8 AUC results comparison(Case 2)
图9和图10分别给出了纵向恒迎角跳跃和侧向倾斜转弯机动的HGV轨迹预报结果与预报100 s时的空间误差散布结果。由图9可以看出,由于倾侧转弯的HGV为了实现更大的侧向机动范围,倾侧角不会频繁反转,因此基于典型控制规律的轨迹预报方法也可以在一定程度上实现对这类机动滑翔目标的轨迹预报。而采用SVM运动识别的轨迹预报方法,可以辨识出轨迹的典型参数,进而重构得到飞行器的控制输入。后一种方法可以更加准确地辨识出控制参数的变化区间,避免对控制量拟合造成的误差,因此轨迹预报精度更高。通过进行100次Monte Carlo仿真,图10给出了2种方法预报100 s时的空间误差散落点分布。采用SVM 运动识别轨迹预报方法的误差散布在5 km以内,而采用典型控制规律预报方法的误差散布超过5 km。
为定量比较2种预报方法的精度,预报恒迎角倾侧转弯机动目标30 s、50 s和100 s时的位置误差统计平均值如表5所示。可以看出,对于该类机动目标,基于SVM-EKF运动识别的方法预报30 s、50 s和100 s的位置精度分别可以提高14%、17%和20%。
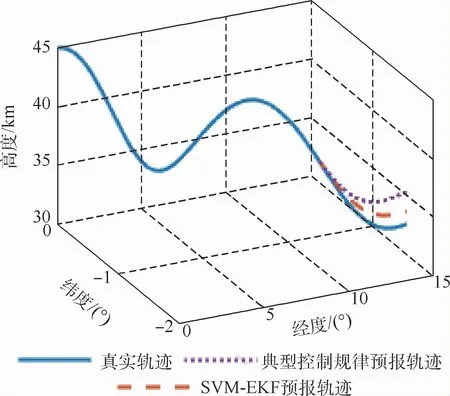
图9 定迎角转弯机动轨迹预报结果Fig.9 Trajectory prediction results for fixed angle of attack turning maneuver
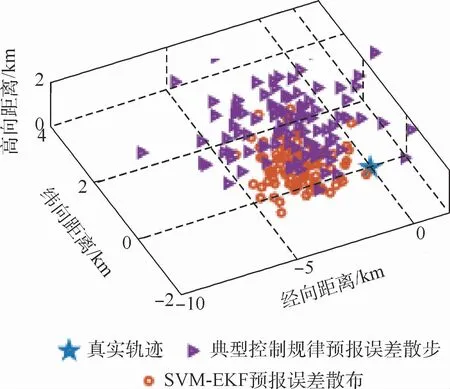
图10 定迎角转弯机动轨迹100 s预报结果空间误差散布Fig.10 Spatial error distribution of 100 s trajectory prediction results for fixed angle of attack turning maneuver

表5 定迎角转弯机动位置预报误差统计平均值Table 5 Statistical mean value of position prediction error for fixed angle of attack turning maneuver
综上所述,从2个典型算例的仿真结果可知,通过对经验弹道的离线学习建立SVM分类模型,将含误差的HGV的轨迹跟踪结果作为诊断数据代入SVM分类模型,可以比较准确地识别出目标的机动弹道参数,为轨迹预报提供更准确的控制量重构知识。因此,基于SVM-EKF运动识别的HGV轨迹预报方法可以有效提高机动目标的轨迹预报精度。
此外,本文所提方法具有一定的推广泛化能力,具体表现在3个方面:①训练集和诊断集弹道数据来源的飞行器模型近似但不完全相同;②诊断集的弹道数据由轨迹跟踪得到,包含噪声和跟踪误差;③诊断集数据的飞行控制量与训练集数据的飞行控制量不完全一致。
7 结 论
1)本文针对HGV的轨迹预报问题,在充分分析其飞行动力学特性的前提下,提出了基于SVM-EKF运动识别的轨迹预报方法。
2)所提方法给出了HGV的运动行为识别框架和轨迹估计-运动识别-轨迹预报流程。所提方法对前期的离线弹道数据样本进行学习,可以在线获得HGV的控制参数变化范围。
3)所提方法可以对影响HGV轨迹特征的典型参数进行辨识,进而实现对目标飞行轨迹的预报,具有较广泛的适用性和较强的有效性,可以为进一步拦截来袭目标提供合理的先验信息,提高拦截概率。
猜你喜欢
学苑创造·A版(2024年5期)2024-06-10 21:55:57
军民两用技术与产品(2021年7期)2021-10-13 08:12:20
装备制造技术(2020年3期)2020-12-25 05:21:52
中国空间科学技术(2020年4期)2020-12-01 02:35:12
当代陕西(2019年12期)2019-07-12 09:12:02
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
小学时代(2017年16期)2017-06-19 19:33:19
中国科技博览(2016年1期)2016-04-25 14:07:30
船海工程(2015年5期)2016-01-18 10:40:40
百科探秘·航空航天(2015年10期)2015-11-07 07:05:17