混合自动驾驶环境下快速路速度引导仿真
2021-01-05 00:35:26陈大山
应用技术学报 2020年4期
陈大山
(上海应用技术大学 轨道交通学院,上海 201418)
城市快速路作为城市内部的快速高效交通服务基础设施,具有非常重要的作用,在城市道路交通基础设施体系中,快速路占比不大,但是交通分担率却很高,上海市高架道路仅占市区道路面积的5%,却承担着市内35%的交通出行,北京市主要快速路占北京路网长度的8%,却承载了近50%的车流量[1]。伴随交通需求的跨越式增长以及交通拥堵与交通事故的频发,在车路协调研究背景下,需要在城市快速路管理中引入主动交通集成管理。速度引导控制作为主动交通管理的重要组成部分,其对提高快速路通行能力、降低快速路事故的风险性与减缓甚至是消除交通拥堵具有一定的价值。同时,自动驾驶技术在近几年来得到了广泛的社会关注,IHS环球透视汽车部门曾预测2035年全球将拥有近 5 400 万辆自动驾驶汽车,2050年之后,几乎所有汽车或将是自动驾驶汽车。因此在全面自动驾驶时代到来之前,常规驾驶与自动驾驶混合的交通状态将持续较长时间。混合自动驾驶环境下,对常规交通控制管理的理念、技术、方法等将带来巨大的挑战[2-4]。通过速度引导控制可以提高道路运行效率,降低事故发生率;然而在混合自动驾驶环境下,混合率直接影响控制效果。本文通过混合自动驾驶仿真环境下,对速度引导控制的效应分析,为精细化的速度引导控制提供支撑。
1 汽车自动驾驶环境
目前建模自动驾驶车辆可以分为2种方法,一种是基于修改交通流模型的建模,另外一种是基于实验数据的建模。尽管基于真实的实验数据更加的可靠,但是考虑到成本、安全性以及目前还不能够实现完全自动驾驶实验等原因,基于修改后的交通流模型建模方法在研究中应用更为普遍。由Treiber提出的智能驾驶人模型 (intelligent driver model,IDM)建模自动驾驶环境下车辆的行为具有一定的代表性[5]。与其他模型相比,IDM的模型需要标定的参数较少,而且IDM可以研究多种交通流状态下的车辆交通行为,IDM模型公式如下:
式中:a(k)为k时段加速度;v(k)为当前车辆的速度;v0为车辆的期望速度;s(k)为车辆的车辆间距;s0为最小车辆间隔;HW为车头时距;Δv(k)为车辆的速度差;a为最大加速度;b为期望减速度,期望速度v0与k时段的速度引导控制值相同。自动驾驶车辆通过采用较常规驾驶员驾驶更小的车头间距,如果自动驾驶车辆相互跟随,则服从自动驾驶跟驰模型,拥有最小的车头间距,如果自动驾驶车辆跟随常规驾驶车辆,其车头间距较常规车辆跟驰的车头间距要小,基于IDM模型,采用微观仿真软件VISSIM来模拟车辆自动驾驶环境。
2 快速路速度引导控制
对于快速路速度引导控制,国内外研究学者进行了一系列的研究。杨兆生等[6]通过城市快速路匝道调节与动态速度引导协调控制,根据历史数据统计分析与专家经验针对多种不同交通状态进行速度引导控制;李家宝等[7]面向实际应用采用模糊逻辑来确定限速值,考虑的因素主要有车辆群状态与路面状态;林尚伟等[8]同样采用模糊逻辑来确定限速值,考虑的因素有路段平均车流密度和路面状态估计值。梁新荣等[9]认为限速控制系统是一个非线性时变系统,难于用数学模型准确建模,提出一种模糊神经网络实现限速控制,通过分析车辆群状态、路面性能、气象条件等,建立交通流速度限制模糊神经网络模型,并进行了仿真研究。Allaby等[10]采用的策略是根据流量、车辆速度与占有率进行二叉树分析进而确定速度值,是基于规则的控制策略,简单高效易于实现。确定合理速度引导值对于交通运行效果有很大的影响,国外多以85%位车速作为限速值,85%位车速改善行程安全与效率决定于道路上车辆速度分布的离散程度,当道路较为拥挤时,车辆离散程度较大,85%位车速限制显得不够精细。为充分考虑交通流参数以及速度引导控制的灵活适应性,速度引导值采用Khondaker模型[11],即:
3 仿真系统框架
速度引导仿真系统使用VISSIM软件来模拟现实的交通世界;交通流模型的数值建模及求解在MATLAB软件中实现;VISSIM、MATLAB的接口函数来实现数据交换和控制策略。因此在线仿真系统按照功能定位可以划分为3个功能模块,分别是仿真模块、策略实现模块和接口模块,如图1所示。
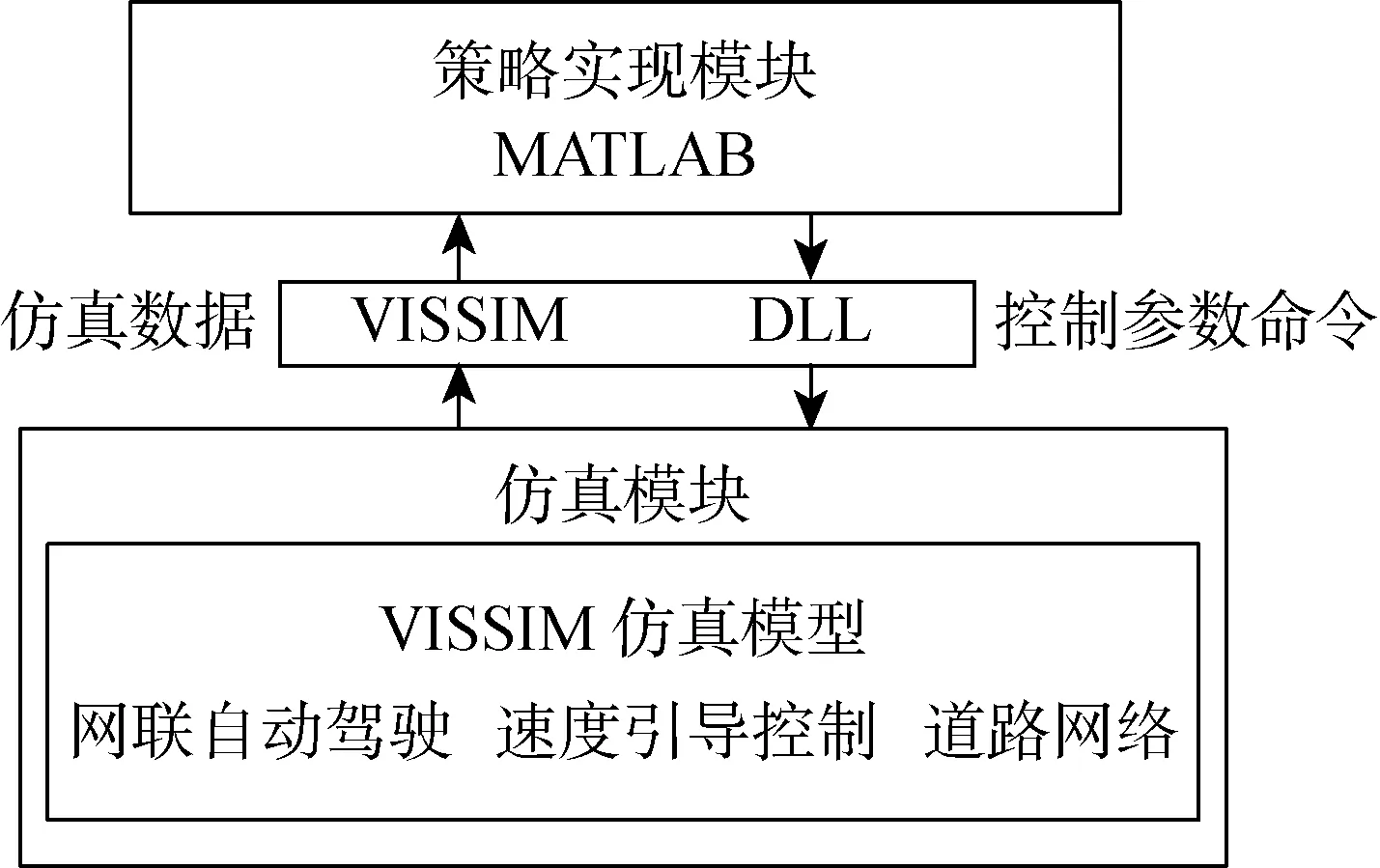
图1 仿真框架Fig.1 Simulation framework
通过使用外部驾驶员模型的动态链接库(dynamic link library,DLL)接口来实现IDM模型,VISSIM通过实时调用外部驾驶员动态链接库函数,来实现车辆行为的改变。
4 道路安全评估
道路安全评估可以直接评估也可以通过间接的方法来评估。直接的评估方法以交通事故统计为基础,该方法简单易操作,在日常道路交通管理中应用较为广泛,但是也存在一定的弊端,比如道路交通事故绝对数据相对较少、统计周期相对较长、事故的随机性较大等问题。交通冲突技术是间接交通安全评价方法中的代表性方法,其具有冲突数量相对较多、周期较短、规律性较强等特点,在道路交通安全研究领域得到了极为广泛的应用研究;但人工观测交通冲突方法主观随意性较大,同时需要耗费大量人力物力。因此美国联邦公路局开发了间接安全分析模型(surrogate safety assessment model,SSAM)[12],用来分析微观仿真模型输出轨迹文件的软件,其可以利用交通冲突技术进行安全评价。

图2 快速路图Fig.2 Simulated expressway
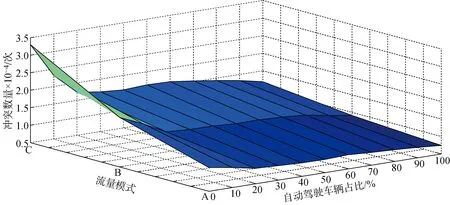
图3 中低流量下不同自动驾驶比例冲突数量Fig.3 Number of conflicts under low-medium traffic flow and different autonomous vehicles
5 案例仿真分析
案例仿真分析的实体路段及走向如图2所示,其为上海市内环快速路外环方向黄兴路至西藏北路长度约为5 km。该研究路段包含因车道减少而导致的常发性瓶颈点且路段线形变化较大,为研究速度引导控制效应分析提供了一个直接的目标对象。该快速路段分为8个路段,每个路段分别设有速度引导控制,速度引导变化周期为1 min。
混合自动驾驶环境下快速路速度引导仿真分析从混合率与交通量两个方面进行研究,自动驾驶车辆比例从0%按照10%递增到100%。其中0%为无自动驾驶车辆,100%为完全自动驾驶车辆。交通量从 1 000 veh/h按照500 veh/h步长逐渐递增到 3 500 veh/h。仿真研究6类交通量模式,其中模式A、B、C对应为中低流量;模式D、E、F对应为高流量,每种模式下对应于不同的自动驾驶车辆比例。在仿真平台中进行多种模式的测试分析,选取主线1 km路段作为行程时间监测段;不同交通需求模式下进行行程时间统计分析,同时在不同的交通模式与自动驾驶车辆比例条件下,通过SSAM冲突分析软件分析仿真输出的车辆轨迹文件,对冲突数据进行统计分析,最终结果如图3~6所示。
图3为在中低流量模式下的冲突数量,随着自动驾驶车辆比例的提高,车辆的冲突数量呈减少的趋势,同时随着车量的增加,冲突的数量也不断的增多,但不同自动驾驶比例之间变化不大。图4为高流量模式下冲突的数量,由图4可见,随着自动驾驶车辆比例的提高,冲突数量并没有明显的规则变化。图5为中低流量下不同自动驾驶比例行程时间,由图5可见,在不同流量模式下随着自动驾驶比例的提高,监测路段行程时间具有较好的稳定性。
图6为高流量下不同自动驾驶比例行程时间。由图6可见,尽管加入了自动驾驶,因为整体流量水平较高,难以保持行程时间的可靠性,自动驾驶比例对于行程时间的影响无明显规则。结果表明,基于混合自动驾驶环境下的速度引导控制,在中低流量模式时行程时间与冲突数量都随自动驾驶比例的提高有一定的减少,而且行程时间的稳定性较高;在高流量模式下,自动驾驶车辆比例对于冲突数量与行程时间无明显的规则。因此在速度引导应用于实践过程中需要对其边界条件进行详细的分析,使得速度引导控制正面效应最大化。

图4 高流量下不同自动驾驶比例冲突数量Fig.4 Number of conflicts under high traffic flow and different autonomous vehicles
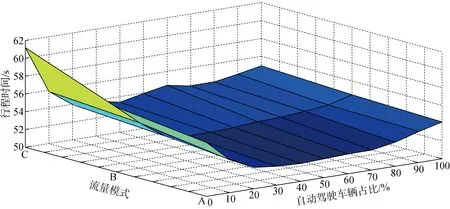
图5 中低流量下不同自动驾驶比例行程时间Fig.5 Travel time under low-medium traffic flow and different autonomous vehicles
6 结 语
建立混合自动驾驶环境下快速路速度引导仿真分析平台,通过VISSIM与MATLAB进行数据交换与控制策略实施,对比分析了多种交通模式在不同的自动驾驶比例下速度引导控制效应,表明速度引导控制在中低交通量模式时,随着自动驾驶比例的提高,道路的安全与效率都得到改善。
猜你喜欢
环球时报(2022-04-16)2022-04-16 14:38:15
小学生学习指导(高年级)(2021年3期)2021-04-06 08:49:44
井冈教育(2020年6期)2020-12-14 03:04:32
上海公路(2019年1期)2019-06-18 11:05:06
红土地(2016年7期)2016-02-27 15:05:54
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05 02:19:37
中国卫生(2014年7期)2014-11-10 02:33:04
浙江人大(2014年6期)2014-03-20 16:20:40
城市道桥与防洪(2013年8期)2013-03-11 15:18:11
城市道桥与防洪(2013年8期)2013-03-11 15:18:00