GPS/BDS 系统间偏差特性及其对PPP 影响分析
2021-01-05 10:57宋美慧柴艳菊张宝成
导航定位学报 2020年6期
宋美慧,柴艳菊,张宝成
(1.中国科学院精密测量科学与技术创新研究院 大地测量与地球动力学国家重点实验室,武汉 430077;2.中国科学院大学 地球与行星科学学院,北京 100049)
0 引言
目前,我国北斗卫星导航系统(BeiDou navigation satellite system, BDS)开始向全球用户提供定位导航和授时(positioning, navigation, and timing, PNT)服务。开展以BDS 为主的多系统融合定位,对提高用户定位精度和可靠性具有明显优势,已成为全球卫星导航系统(global navigation satellite system, GNSS)的重要研究方向。由于不同导航系统之间存在时空系统偏差和系统间硬件延迟偏差,统称为系统间偏差(inter-system bias,ISB)[1],在多系统融合进行精密单点定位(precise point positioning, PPP)时,ISB 的影响不可忽略。目前,对ISB 的处理采用2 种方式:①分别估计每个系统接收机钟差;②将全球定位系统(global positioning system, GPS)的接收机钟差和其他系统相对于GPS 的ISB 作为参数进行估计。这2 种处理方式是不同的,其中第1 种方式等价于将ISB 作为时变参数,每个历元进行1 次估计,即不考虑ISB 的稳定性。
近年来,许多学者对ISB 的变化特性及其对定位的影响进行了深入研究。文献[2-3]分别利用标准单点定位、PPP 方法分析了ISB 的日变化和长期变化特性,结论为ISB 具有短期稳定性,且日变化与接收机类型、卫星数等有关。文献[4-5]分析了北斗卫星导航(区域)系统即北斗二号(BeiDou navigation satellite (regional) system,BDS-2)各类星座与GPS 之间的ISB 特性,认为BDS-2 中,各类卫星与GPS 之间的ISB 具有一致性,且短期变化比较稳定,并将ISB 作为分段常数进行估计,以提高PPP 定位精度。文献[6-7]对ISB 进行了短期建模,并作为先验约束应用于定位。文献[8-9]详细研究了ISB 的特性,分析了ISB与接收机及分析中心提供的精密产品的关系,并提出适用于各分析中心的ISB 处理方式。文献[10]研究了 GPS 与伽利略卫星导航系统(Galileo satellite navigation system, Galileo)之间的ISB 特性及其对模糊度固定的影响。文献[11-12]验证了BDS-2 与第 3 代北斗卫星导航系统即北斗三号(BeiDou navigation satellite system with global coverage, BDS-3)之间存在系统性的偏差。文献[13]对BDS-3 的观测数据进行了分析,发现其数据质量总体优于BDS-2。文献[14]详细分析了BDS-3与BDS-2,GPS 以及Galileo 之间的ISB,及其对实时动态(real-time kinematic, RTK)载波相位差分技术的影响,结果表明BDS-2 和BDS-3 之间的重叠频点不存在ISB,而非重叠频点则存在ISB。
由于BDS-3 尚在建设,目前只有很少跟踪站能提供BDS-3 观测数据,因此对BDS-3 研究比较少。本文重点利用德国地学研究中心(Geo Forschungs Zentrum, GFZ)、武汉大学(Wuhan University, WHU)国际GNSS 数据中心,欧洲定轨中心(Center for Orbit Determination in Europe,CODE)的精密产品和多模 GNSS 试验跟踪网(multi-GNSS experiment, MGEX)的观测数据,系统分析GPS 与BDS-2、BDS-2 与BDS-3 之间ISB 变化特性,并分析ISB 处理策略对融合PPP的影响。
1 顾及ISB 的多系统PPP 定位模型
ISB 的具体表达式[1,8]为

式中: ISBG/C为GPS 与BDS 之间的ISB; TG/C为GPS 与BDS 之间的时间偏差,它由外部卫星时钟产品引入的时间数据决定,与接收机无关; dhd为系统间接收机硬件延迟偏差;分别为GPS和BDS 的接收机伪距硬件延迟;分别为吸收了硬件延迟后的GPS 和BDS 接收机钟差。
顾及ISB 的多系统PPP 定位模型[8,12]为:
式中:上标G、C2、C3 分别为GPS、BDS-2 和BDS-3; PIF、IFΦ 分别为无电离层组合的伪距和载波相位观测值;ρ 为卫星和接收机之间的距离;c为光速;为接收机钟差,它吸收了接收机伪距硬件延迟;为精密产品中的精密钟差,它是吸收了卫星伪距无电离层组合硬件延迟的精密钟差;m为投影函数; TZWD为天顶对流层湿延迟;ρε 、φε分别为伪距和载波相位的观测噪声; λIF为波长;为参数重组之后的模糊度,它不仅包含了卫星和接收机伪距硬件延迟,也包含了载波相位硬件延迟,从而失去了整数特性[15-16]。多系统融合PPP处理策略如表1 所示。

表1 多系统PPP 解算选项设置和数据处理策略
2 实验与结果分析
2.1 数据描述
本文利用GFZ、WHU 及CODE 3 个分析中心提供的精密卫星轨道和钟差产品,选取MGEX的gmsd、jfng、gamg、sod3 跟踪站,2018-09-17—2018-10-10 的GNSS 数据,分析GPS 与BDS-2之间的ISB 特性;选取pots、met3 跟踪站,2019-11-25—2019-12-18 的 GNSS 观测数据分析了BDS-2 与BDS-3 之间ISB 特性;选取urum 跟踪站 2019-11-28 和位于武汉中科院测地所办公楼顶的0050 跟踪站2019-01-14 的实测GNSS 数据,分析ISB 对PPP 定位的影响。各跟踪站的接收机类型如表2 所示。

表2 跟踪站的接收机信息
2.2 GPS 与BDS-2 之间的ISB 日变化特性
利用GFZ、WHU 和CODE 提供的精密产品,计算了gmsd、jfng、gamg、sod3 跟踪站2018-09-17—2018-10-10 GPS 与BDS-2 每个历元的ISB 结果。由于每天的ISB 变化类似,这里选取2018-10-04 为例,来分析ISB 日变化特性。为了分析分析中心产品、跟踪站接收机类型对ISB 的影响,首先利用GFZ 分析中心提供的精密产品,解算各跟踪站的ISB,分析ISB 受接收机类型的影响,结果如图1 所示;然后利用GFZ、WHU 和CODE提供的精密产品,解算gamg 站的ISB,分析不同分析中心的精密产品对ISB 的影响,结果如图2所示。


图1 用GFZ 提供的精密产品计算的GPS/BDS-2 ISB
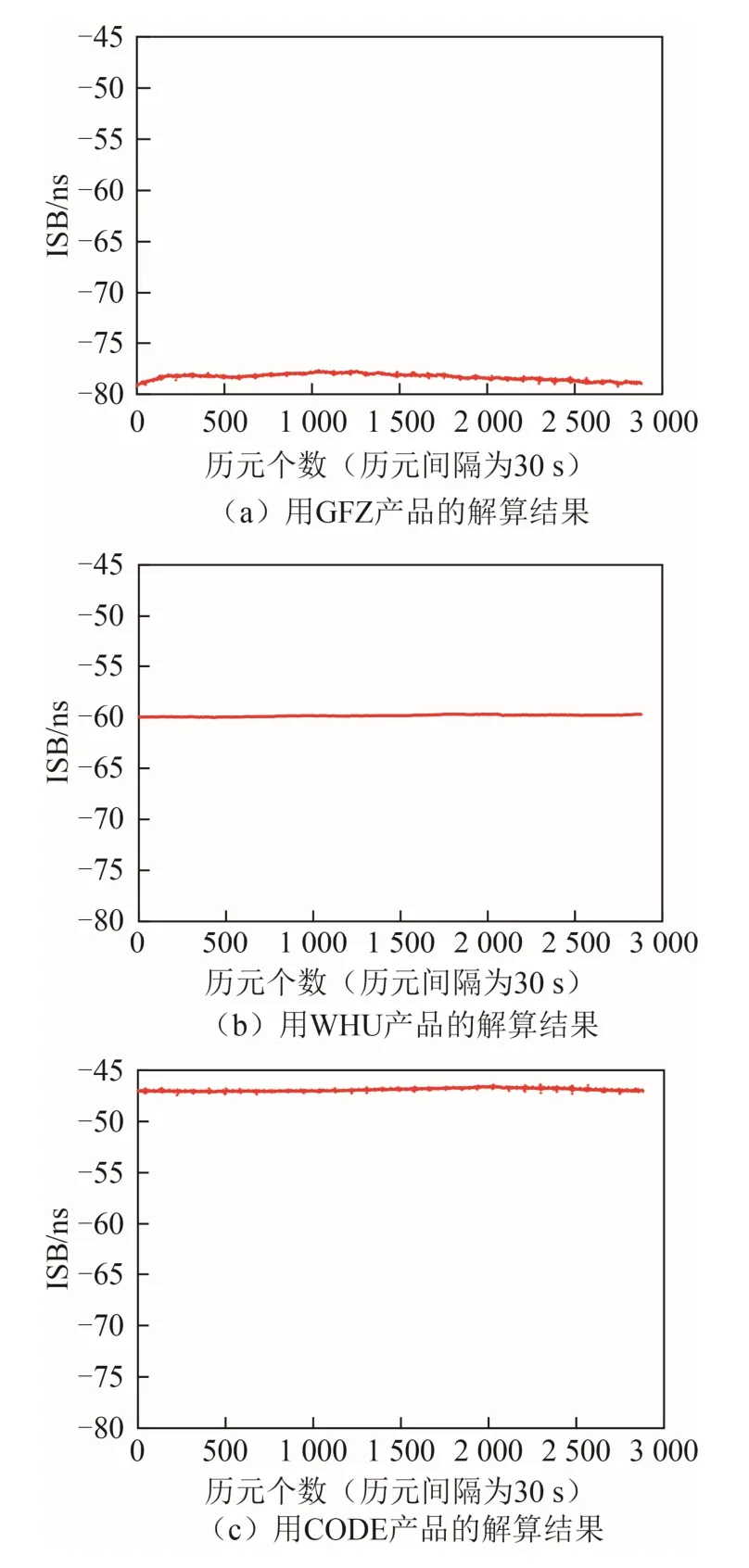
图2 用GFZ/WHU/CODE 提供的精密产品计算gamg 站GPS/BDS-2 ISB
图1 和图2 中ISB 统计结果如表3 所示。

表3 2018-10-04 各跟踪站GPS/BDS-2 的ISB 日均值与标准差 单位:ns
分析图1、图2 和表3 结果可知:1)GPS 与BDS-2 之间的 ISB 日变化相对稳定,其标准差(standard deviation, STD)均小于0.4 ns;2)同一分析中心的精密产品解算的不同站 ISB 日均值差别比较大,这说明ISB 与接收机类型有关;3)不同分析中心的精密产品解算的同一站的ISB日均值差别比较大,表明ISB 与使用的分析中心的精密产品有关,其中WHU、CODE 提供的产品解算的ISB 稳定性优于GFZ 结果。
2.3 GPS/BDS-2 ISB 长期特性
对2.2 节中解算的4 个站,2018-09-17—2018-10-10 GPS 与BDS-2 的ISB 结果进行分析,每天给出1 个平均值,可以得到连续24 d ISB 的日变化,用以分析ISB 长期变化特性,相关结果如图3~图5 所示。

图3 用GFZ 精密产品得到2018-09-17—2018-10-10时间段内各站的ISB
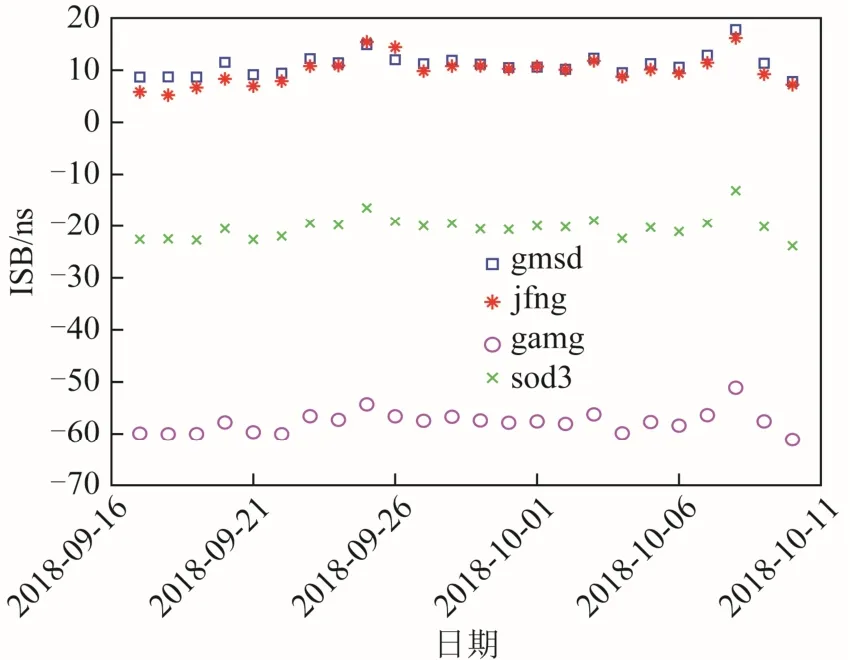
图4 用WHU 精密产品得到2018-09-17—2018-10-10时间段内各站的ISB

图5 用CODE 精密产品得到2018-09-17—2018-10-10时间段内各站的ISB
分析图3~图5 可知:1)利用不同分析中心的产品得到同一跟踪站连续ISB 日均值变化存在差异,某些相邻天会发生不规律的跳变,其原因可能是由于不同日内卫星钟基准不同引起的[1];2)同一分析中心产品得到的各站连续ISB 日均值变化与各站接收机类型有关。
说明:图3 中各测站均缺少2018-09-30 的结果,原因是该天各跟踪站观测质量比较差(精密钟差文件缺少C11 和G17 的卫星钟差数据,而O 文件里有这2 颗卫星),导致PPP 收敛不理想。若删除这2 颗卫星,则对ISB 解算有一定影响。
2.4 BDS-2/BDS-3 ISB 特性
由于只有WHU 可以提供BDS-3 的精密产品,因此利用WUH 的精密产品,计算pots 和met3 站在2019-11-25—2019-12-18 期间,BDS-2 与BDS-3之间的ISB 参数。由于BDS-3 还在建设中,与BDS-2相比,信号相比发生了一些变化,因此目前可选择的跟踪站及观测频点比较有限。本文选择BDS-2 和BDS-3 的B1-2 和B2b 2 个频点的观测,分析BDS-2与BDS-3 之间ISB 的变化特性。其中BDS-3 的B1-2信号与BDS-2 完全相同,而BDS-3 的B2b 信号不同于BDS-2 的B2b 信号[17]。以2019-12-07 2 个站的ISB 结果来分析其日变化特性,结果如图6 所示。将2019-11-25—2019-12-18 期间内,各站每天的ISB 结果取均值,分析ISB 长期变化特性,结果如图7。

图6 用WHU 精密产品计算2019-12-07 各站BDS-2/BDS-3 的ISB
图6 表明,2 个站BDS-2 和BDS-3 之间的ISB变化趋势类似,但是大小不为0 且不相同。这表明2 者之间存在系统偏差,且ISB 与跟踪站接收机类型有关,在融合PPP 定位时,应该作为2 个系统考虑。分析图7 结果可知,相邻天之间BDS-2/BDS-3之间的ISB 存在不规律跳变值。

图7 2019-11-25—2019-12-18 期间pots 和met3 跟踪站BDS-2/BDS-3 ISB 的长期变化
3 ISB 不同处理方式对GPS/BDS 融合PPP的影响
由于ISB 日变化相对稳定,在多系统融合PPP定位中,目前常用的处理方式为白噪声、随机游走过程(RW)、常数(CT)、30 min 分段常数(30 min CT)、1 h 分段常数(1 h CT)、2 h 分段常数(2 h CT)6 种处理方式[9]。下面利用WHU 分析中心的精密产品,对ISB 按以上6 种处理方式,对urum站2019-11-28 和0050 站2019-01-14 的GPS 和BDS 数据进行融合PPP 解算,对定位精度,即均方根误差(root mean square, RMS)和收敛时间(收敛时间一般是各方向的定位误差稳定在±0.1 m 以内所需的时间)进行统计,结果如图8 所示。
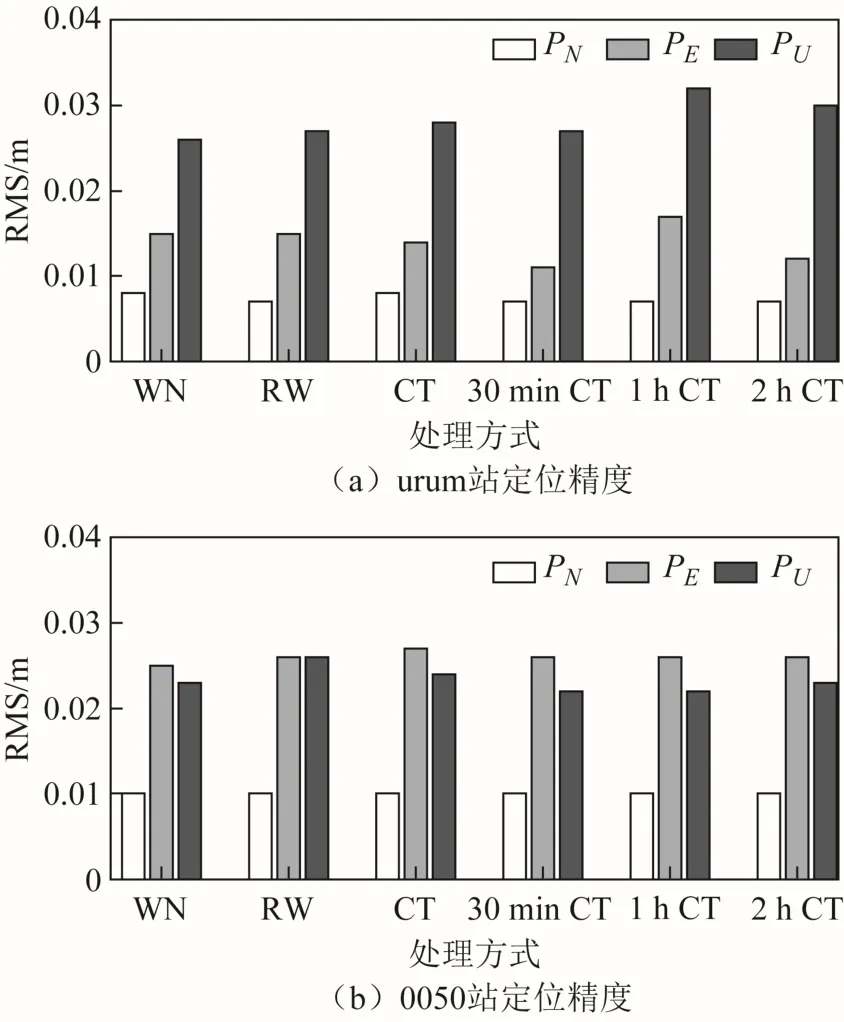

图8 不同ISB 处理方式的PPP 定位精度和收敛时间统计结果
由图8 可知,6 种ISB 处理方式对GPS/BDS融合PPP 定位影响不大;就收敛时间看,2 个测站的ISB 采用常数和分段常数估计,收敛速度更快;而就定位精度而言,30 min 分段常数方式定位精度稍优于其他估计方式,在E 方向和U 方向表现较明显。结合定位精度和收敛时间,将ISB 作为30 min 常数处理结果最优。
4 结束语
本文对GPS 与BDS-2 之间、BDS-2 与BDS-3之间的ISB 变化特性进行了分析,并在GPS/BDS融合PPP 中,将ISB 作为白噪声、随机游走过程、常数,以及30 min、1 h 和2 h 分段常数进行处理,分析了不同处理方式对融合PPP 定位结果的影响。得出以下结论:
1)ISB 日变化比较稳定,其日均值大小与接收机类型和使用的分析中心精密产品有关;
2)ISB 相邻天之间存在不规律跳变,原因可能是不同产品的导航系统间的卫星钟基准不同;
3)当使用非重叠频率的BDS-2 和BDS-3 观测时,BDS-2/BDS-3 的ISB 不为0,即BDS-2 和BDS-3 之间存在系统偏差;
4)综合 PPP 收敛时间和定位精度,建议GPS/BDS 融合PPP 定位时将ISB 作为30 min 常数进行处理。
随着BDS-3 的建设和完善,深入研究BDS-3与其他系统间的ISB 特性,提高以BDS 为主的多系统导航定位精度和收敛速度是下一步要 深入研究的问题。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
军民两用技术与产品(2022年7期)2022-08-06
导航定位学报(2022年1期)2022-02-17
导航定位学报(2021年4期)2021-08-29
中国电气工程学报(2019年18期)2019-10-21
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
卷宗(2018年14期)2018-06-29