基于EtherCAT总线的七自由度机械臂的隐蔽攻击技术
2021-01-04 05:52汪世鹏李连鹏王志良
工程科学学报 2020年12期
汪世鹏,解 仑,李连鹏,孟 盛,王志良
北京科技大学计算机与通信工程学院,北京 100083
工业机械臂是一种多输入多输出的类人的作业、高度自主的控制系统,广泛应用于医疗护理、家庭服务、工业制造等领域.近年来,随着信息物理系统网络与互联网的融合,机械臂控制系统的安全暴露于互联网中,使得攻击者攻击成功的几率逐年增加.Stuxnet和Duqu恶意病毒已经证明了信息物理系统是能够被攻击而且造成的后果极其严重[1-2].
攻击者通常选择现场总线和机械臂控制模型作为入侵对象.机械臂系统中以太网总线种类很多,常用的有Profinet IO[3-5]、Modbus[6-7]、EtherCAT[8-9]等.相较于其他总线而言,EtherCAT总线实时性更高、具有更灵活的网络拓扑结构、可无缝集成现有的总线系统.因此,EtherCAT总线在工业控制领域中备受关注.然而,该总线缺少像身份认证等安全上的保障,Granat等[10]指出EtherCAT总线暴露于DoS/DDoS,中间人攻击等常见的攻击.与可达空间受限的六自由度机械臂相比,七自由度机械臂(7-DOF manipulator)能保持末端机构在平面上位置不变的情况下,实现构型的变换,而且七自由度机械臂在设计上和人体手臂的模型相类似,因此具有更好的灵活性[11].
在信息物理攻击方法及模型研究等方面,隐蔽攻击(Covert attacks, CA)又称为错误数据注入攻击(False data injection attacks, FDI),是一类比较有意义的攻击方式[12-13].Xie等[14]提出了一种基于错误数据注入的攻击方法,攻击者如果获得了当前电力系统相关配置信息,便有可能注入干扰智能电网状态估计过程的恶意攻击包,从而绕开系统中已有的不良数据检测方法.隐蔽攻击模型的思路是篡改当前控制系统的传感器测量值,并且使修改后的数值仍处于合法运行范围之内,从而避免被标准的入侵检测方法检测到,实现对控制系统的影响.相较于普通攻击,隐蔽攻击更难被发现,造成的损失也比其他类型的攻击更严重.de Sá等[15]提出了一种针对化工生产过程的隐蔽攻击模型,并对攻击的影响进行了评估.Krotofil和Larsen[16]提出了一种新的化工过程仿真模型,并实施了隐蔽攻击.Quarta等[17]对工业机器人控制系统进行了相关的分析,提出了一个攻击者模型,并将其与工业机器人应该遵守的最低要求相对应:精确感知环境,执行控制逻辑的正确性以及人类操作员的安全性;展示了攻击者如何利用软件漏洞等破坏这些需求,从而导致机器人领域独有的严重后果.Lagraa等使用ROS对机器人摄像机进行了结构化安全评估,并使用一些安全漏洞接管了从机器人摄像机传入的视频流,针对此提出了一种入侵检测系统来检测异常流量[18].Vilches等着重于创建一个开放和免费访问的机器人漏洞评分系统,主要考虑了机器人技术当中的相关安全问题[19].虽然已经有研究人员开始关注机械臂安全相关的研究,但是针对机械臂控制系统的隐蔽攻击的文章还很少.因此,研究基于EtherCAT总线的隐蔽攻击技术对提高机械臂控制系统安全十分必要.
本文提出了一种基于混沌理论的多种群粒子群优化的七自由度机械臂系统PID参数辨识算法;然后使用该算法对EtherCAT总线下的七自由度机械臂进行了系统辨识,得到的参数作为隐蔽控制器的参数;最后根据提出的隐蔽攻击方法展开隐蔽攻击.实验结果表明了在七自由度机械臂上实施隐蔽攻击的可行性.本研究的新颖之处在于提出了一种针对部署在EtherCAT总线上的机械臂隐蔽攻击方法并搭建了实验测试平台.作为探索性的研究,对EtherCAT总线的安全性以及机械臂控制系统的稳定性作出了贡献.
1 七自由度机械臂模型
机械臂运动规划是保障机械臂在符合设定的约束以及避障条件下,依据规划的路径完成位置和姿态的转换.正向运动学通过机械臂各个关节的实际转动或伸缩值,求解其末端的位置和姿态;对应的逆运动学是已知末端的姿态和位置,求解各个关节转动或伸缩量,通常运动规划都是以逆运动学为基础[20].
1.1 运动规划模型
Denavit和Hartenberg[21]为了表示机械臂相邻连杆间的运动规则,针对各个关节的连杆建立坐标系,该坐标系被称为D-H坐标系.按照机械臂连杆和关节的分布情况、依据D-H坐标系的创建规则和各个连杆的长度,建立如图1所示的七自由度机械臂D-H坐标系,可得到如表1所示的机械臂连杆结构参数.
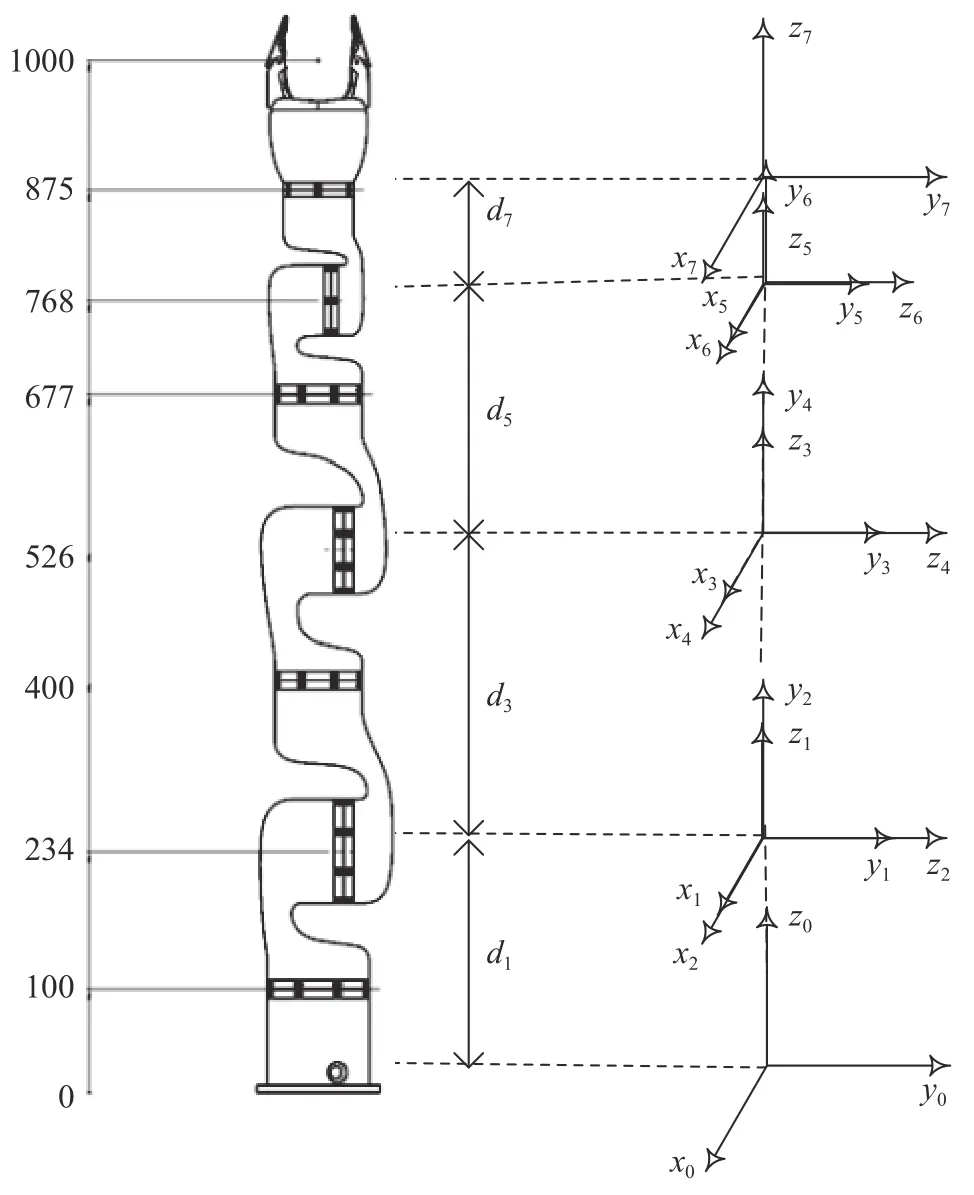
图1 七自由度机械臂D-H坐标系Fig.1 7-DOF manipulator D-H coordinate system
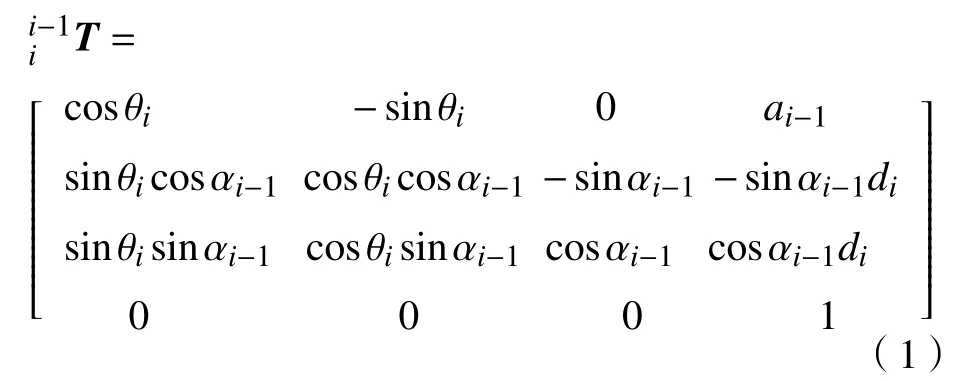
坐标系{i}相对于坐标系{i-1}的坐标变换矩阵如下
已知目标位姿(xt,yt,zt,α,β,γ),则建立逆运动学求解等式
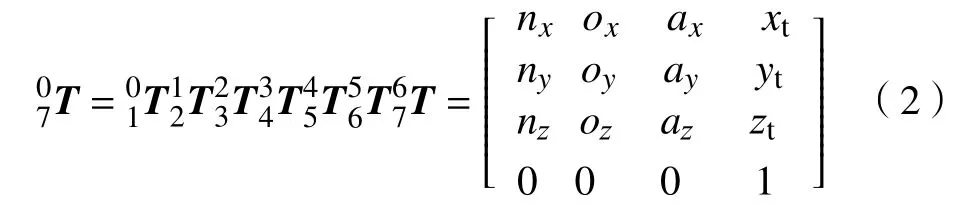
式(2)中,[nx,ny,nz]T、[ox,oy,oz]T、[ax,ay,az]T为机械臂末端的俯仰角、偏航角和滚转角,[xt,yt,zt]T为机械臂末端的位移.依据所建立的D-H坐标系对七自由度机械臂逆运动学模型求解[22].由于构型设计上符合存在封闭解的Pieper准则[23],可求解出各个关节角的解析解方程,得到解析的运动学模型.
1.2 机械臂 PID 控制器模型
机械臂的运动规划需要各个关节的控制器依据模型的参数进行计算才能实施.机械臂运动控制是依靠各个关节执行器来达到目标位姿.本文所用机械臂的关节控制器是采用PID进行调节的.具体PID控制框图如图2所示.
图2中,y表示七自由度机械臂期望的末端位置,表示七自由度机械臂期望的末端速度,表示七自由度机械臂期望的末端加速度;Pd表示规划轨迹的期望位置;ωi(i=1···7)表示关节位置,i(i=1···7)表示关节速度,i(i=1···7)表示关节加速度;x、、分别表示七自由度机械臂末端期望位置、期望速度和期望加速度.
图2所示关节控制器采用三闭环的位置随动系统,位置环使得各个关节到达指定的位置,速度环使得各个关节的速度能够按照要求的量进行转动,电流环可以防止速度过载从而提升系统稳定性.
关节位置控制器是位置式PID控制器为

式中,O(k)表示第k次的关节转动输出,p表示可调节的比例系数,TI表示控制器的积分常数,i表示可调节的积分系数,Ts表示采样周期,Td表示微分常数,d表示可调节的微分系数,e(k)表示第k次的关节转动偏差.
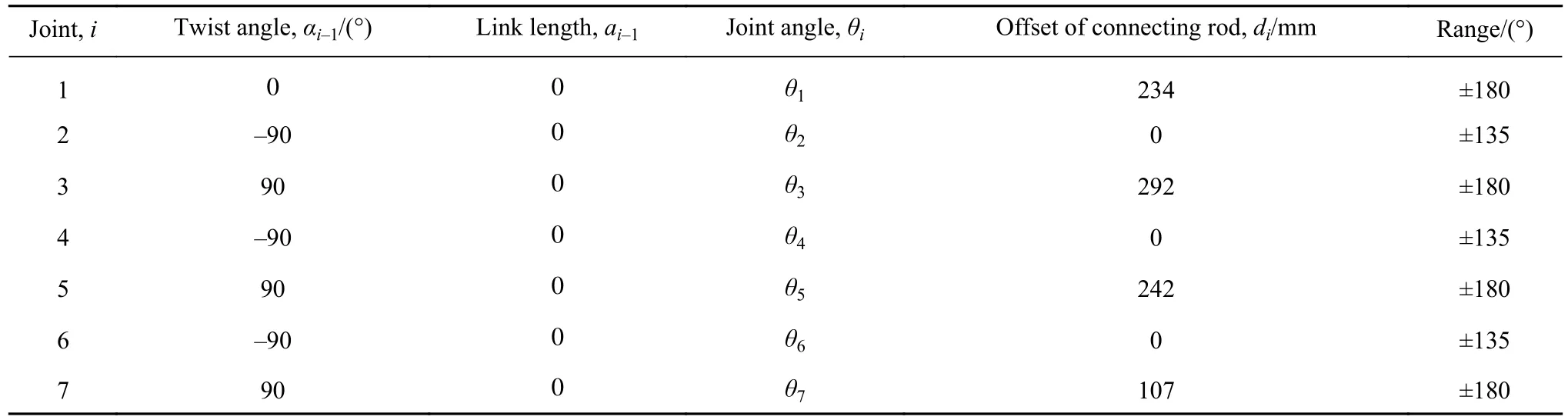
表1 机械臂D-H坐标系参数Table 1 D-H coordinate system parameters of manipulator
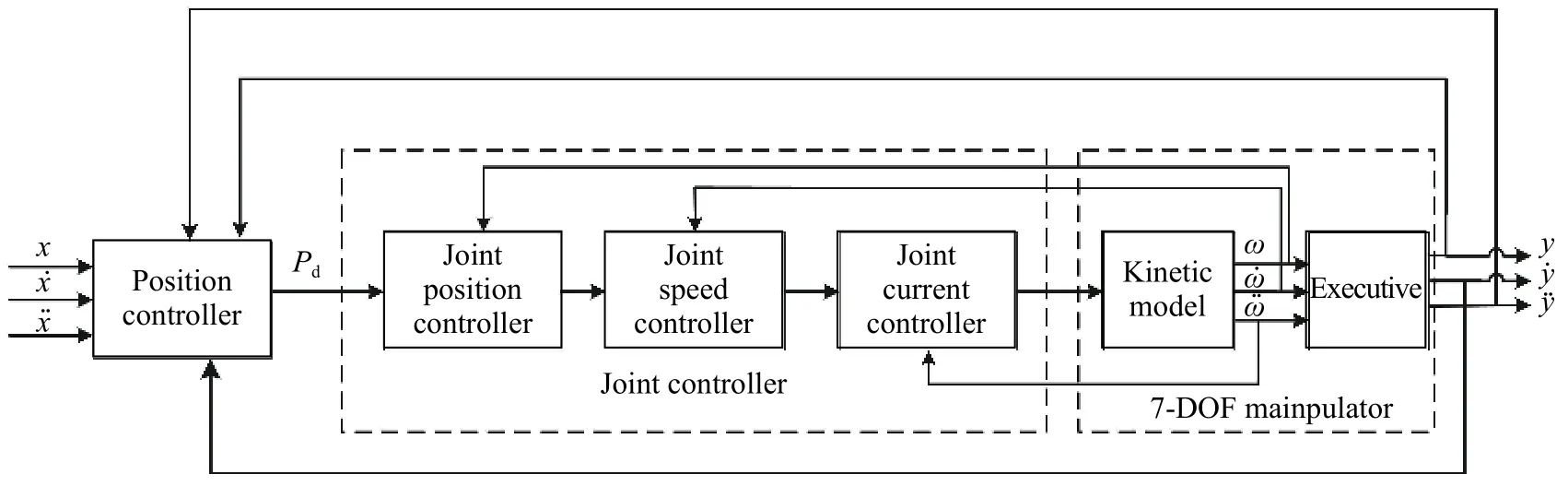
图2 机械臂PID控制框图Fig.2 Manipulator PID control block diagram
2 多种群粒子群的PID 参数辨识
在对机械臂控制系统进行隐蔽攻击时,需要获得足够的先验知识,由于通常只能获取部分机械臂相关的知识,在这种情况下是几乎不能够实施隐蔽攻击,因此需要通过一些措施获取机械臂控制系统模型.本文将群智能优化算法引入到七自由度PID参数辨识过程中,利用多种群粒子群优化系统辨识算法得到七自由度机械臂最佳匹配模型参数,并将其应用到隐蔽攻击方法中.
2.1 多种群粒子群优化算法
混沌粒子群算法(Chaotic particle swarm optimization,CPSO)[24]以及基本粒子群算法(Particle swarm optimization,PSO)[25]等随着算法的搜索空间的维度增加其获取全局最优值的效率会大大降低.多种群粒子群优化算法(Multi-swarm particle swarm optimization,MPSO)[26]是在 PSO上进化而来的一种优化算法,其核心思想是将种群随机划分成几个子群,子群内部按照PSO算法的流程进行迭代更新,并且子群之间共享信息从而帮助整个种群更好地寻优.
多种群粒子群优化算法采取的是主从策略,按照种群之间的竞态关系可以将多种群粒子算法分为竞争型和合作型.合作型多种群粒子群优化算法相对于竞争型而言少了一个迁移因子.本文采用竞争型多种群粒子群算法中主种群的更新策略如下:
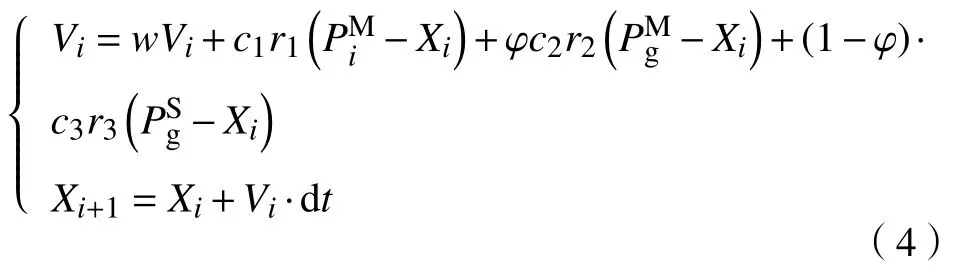
式中,1≤i≤n;Xi及Vi为第i次迭代位置与速度;w是惯性权重,c1,c2,c3是主种群和从种群中粒子的学习权重;r1,r2,r3是主种群和从种群中粒子随机真值,取值为0≤r1,r2,r3≤1;分别是主种群的局部最优位置和全局最优位置;是从种群的全局极值位置;φ是迁移因子,如果从种群中的全局最优位置大于主种群中的全局最优位置,则 φ=1,如果从种群中的全局最优位置和主种群中的全局最优位置处于同等水平,则 φ=0.5,如果从种群中的全局最优位置低于主种群中的全局最优位置,则 φ=0.由从种群和主种群的全局最优位置来搜索整个种群的最优.
2.2 多种群粒子群的PID 参数辨识
基于前述机械臂PID控制模型可知,每个关节都有6个参数需要辨识,因此使用多种群粒子群系统辨识对七自由度机械臂进行辨识的参数为42个.实现基于多种群粒子群算法的七自由度机械臂运动控制模型的系统参数辨识方法的详细步骤如下:
1)将群体中的n个粒子随机初始化到解空间中.根据七自由度机械臂系统模型参数待辨识的个数设置粒子的维度为42,并在随机初始化粒子的起始位置和起始速度.这些初始化了的粒子构成了七自由度机械臂的系统参数解集合并设定好学习权重c1,c2,c3的初始值以及惯性权重w的初始值等.
2)划分群体为多个种群.将种群划分成多个群体,群体的个数为s,划分的方式如下:对所有的粒子进行编号,编号为1的粒子划分进1号子群体中,2号粒子划分进2号子群体中,i号粒子划分进s号子群体中,i+1号粒子被划分进1号子群体中,以此类推,通过这种方式将整个种群划分成多个子群.划分完毕的种群中选择全局最优位置所在的子种群为主群,其余子群为从子群.
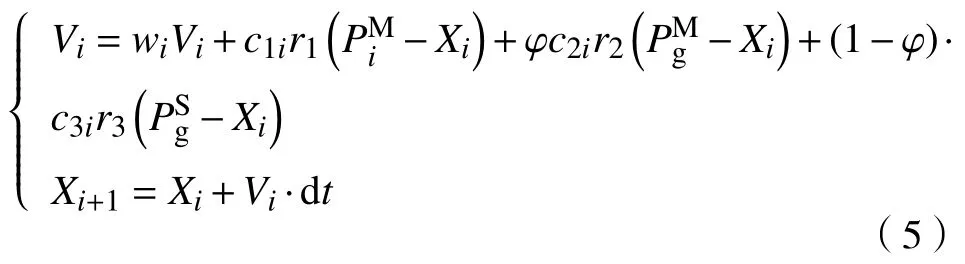
3)通过适应度函数来计算每个子群中粒子对应的适应值和更新的学习因子c1i,c2i,c3i及权重wi.
4)主种群更新.主群根据迭代方程更新群体中粒子的速度和位置,更新公式如下:
5)从子群更新.在更新从子群的时候采用下面的步骤进行.
a)确定从子群参数的可行域[a,b],设置混沌算法初始化参数.
b)通过Logistic映射引入混沌变量,Logistic映射公式为z=μz(1-z),其中,z表示混沌域并且z∈(0,1),μ为Logistic参数,取值范围为μ∈[3.5699456,4].对于粒子位置向量x映射到Logistic方程定义域上得

c)从子群更新粒子的位置以及速度,使用的方程为

搜索过程中将混沌序列使用方程

将粒子逆映射到原来的空间中去.
6)计算从子群中每个粒子的适应度函数值.对这些粒子的位置和粒子历史最优值进行比较,如果优于的话则更新粒子的主种群以及从种群中的粒子最优值,分别得到
7)判断当前位置是否为优于全局最优值.如果是的话,则将当前位置赋给全局最优值Pg.
8)判断迭代是否符合终止要求.将设定的迭代次数值和算法当前的迭代次数进行比较,如果达到了则算法终止,否则,算法将跳转到步骤4继续执行.
七自由度机械臂的多种群粒子算法系统辨识的基本流程图如图3所示.
3 设计与实验
3.1 系统整体架构
本文在工业以太网EtherCAT总线上搭建了七自由度机械臂控制和攻击测试平台,该平台主要包含了EtherCAT主站、工业交换机、EtherCAT从站、七自由度机械臂以及攻击者.提出的平台中各个设备之间的关系如图4所示.
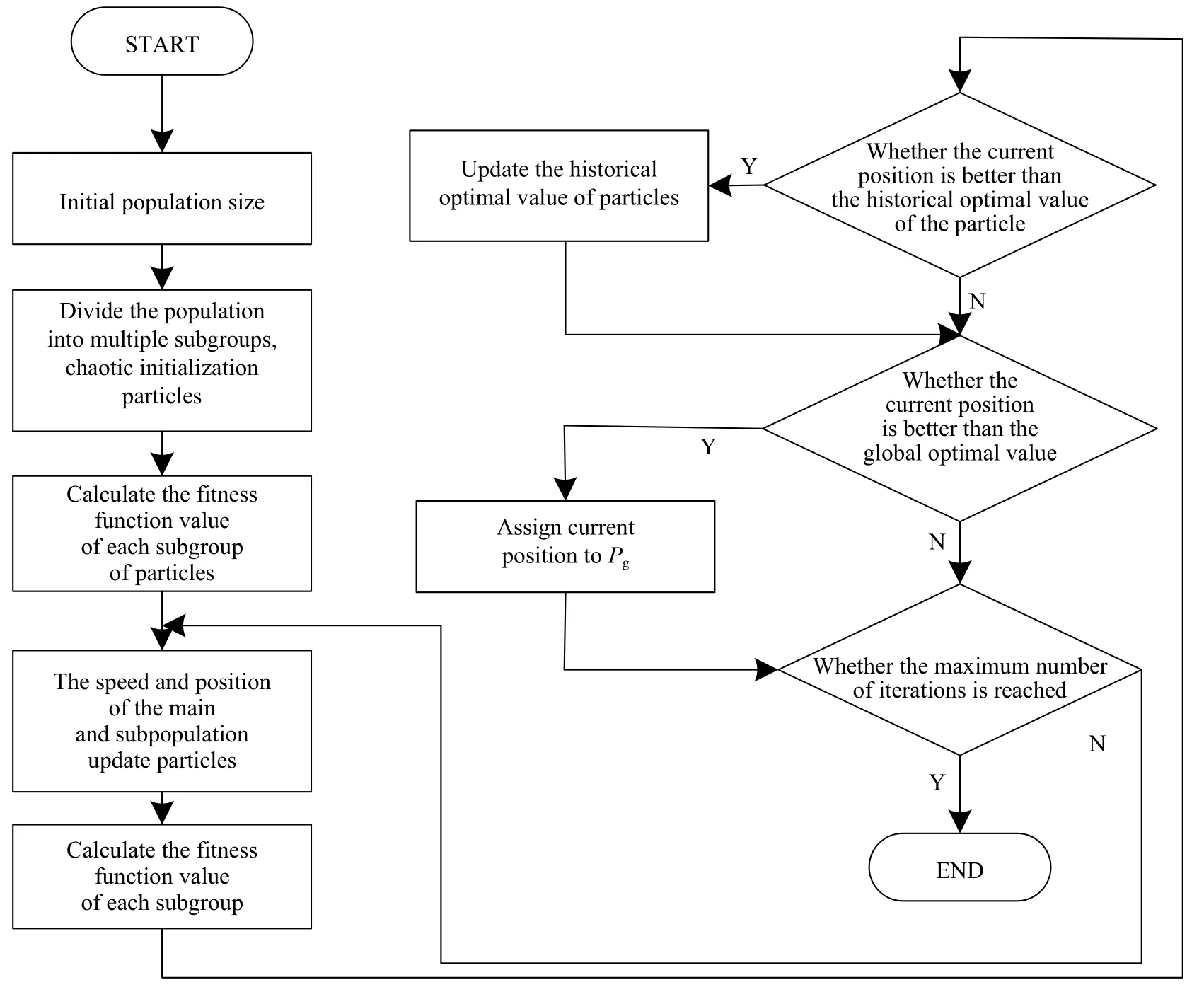
图3 七自由度机械臂的多种群粒子算法系统辨识基本流程图Fig.3 Basic flow chart of MPSO system identification for 7-DOF manipulator
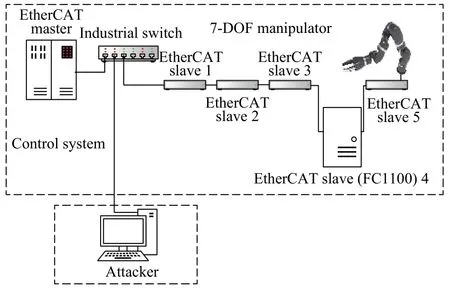
图4 系统整体架构图Fig.4 System architecture
EtherCAT主站采用EtherCAT主站软件架构,在Linux原有的任务调度的基础上移植xenomai,扩展Linux操作系统的在严格通信要求上的任务调度.采用改进的开源主站SOME连接EtherCAT从站读取机械臂的状态信息并向机械臂控制系统中写入命令字.
工业交换机在工业控制系统中用于将工业以太网数据转发到各个受控对象,但同时也提供给攻击者一种入侵方式.在本文中通过工业型交换机攻击七自由度机械臂.
EtherCAT从站主要包含了基于lan9252设计的EtherCAT从站多协议网关以及插入FC1100 PCI卡的主机组成的标准EtherCAT从站系统.本文中设计的EtherCAT从站多协议网关用于连接机械臂等多种实验设备,该网关电路上主要包含了EtherCAT从站专用控制芯片LAN9252、标准以太网接口电路、电源管理电路、STM32的外围设备电路及调试电路等,如图5所示.
攻击者由标准计算机搭载Kali Linux系统,通过工业交换机接入EtherCAT通信网络中.EtherCAT协议在设计的时候并没有考虑连接的安全性来保护主站和从站之间的通信.因此,很容易受到媒体访问控制(Media access control, MAC)欺骗.本文采用了MAC地址欺骗的方法,由于该方法的实施效果取决于工业交换机整体性能,本文在实施实验时不进行相应的研究.EtherCAT协议实施中间人攻击的流程如图6所示.
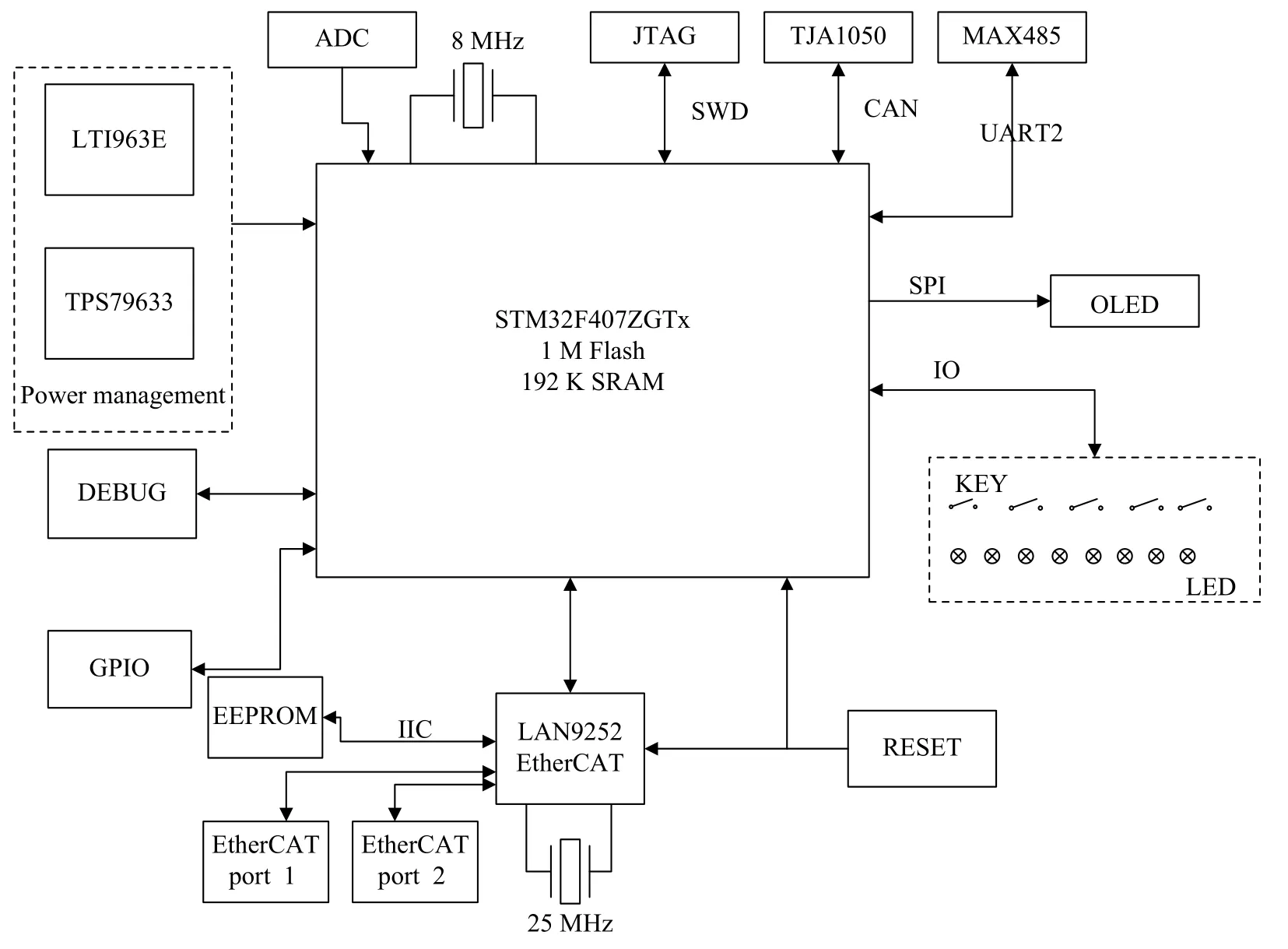
图5 EtherCAT从站多协议网关硬件结构图Fig.5 EtherCAT slave multi-protocol gateway hardware structure diagram
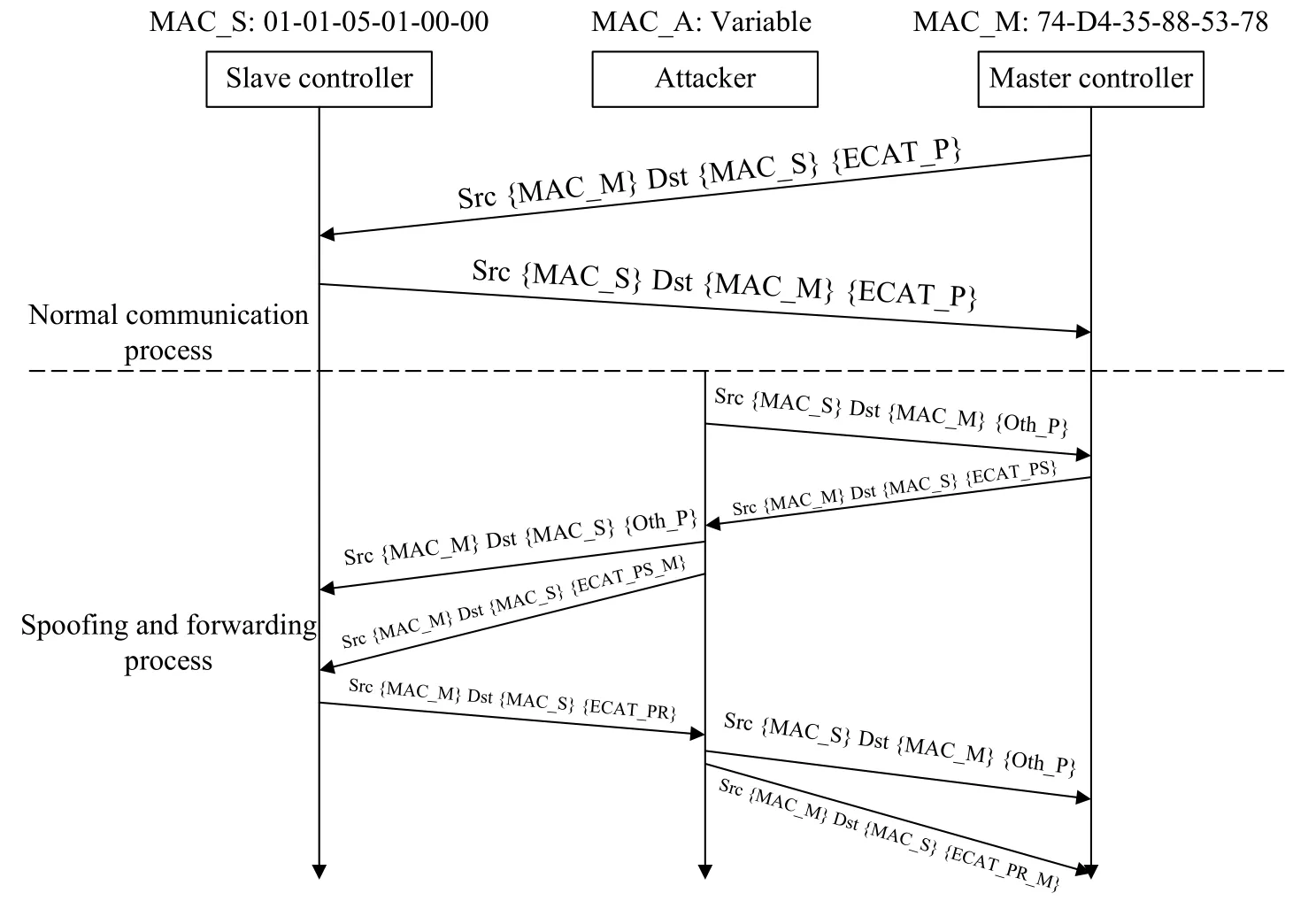
图6 EtherCAT中间人攻击示意图Fig.6 EtherCAT man-in-the-middle attack diagram
图中MAC_S表示EtherCAT从站的MAC地址,MAC_M表示EtherCAT主站的MAC地址,MAC_A表示攻击者根据主站和从站通信获得的主站以及从站伪造地址,根据欺骗的过程进行修改,Src表示通信过程中数据的源地址,Dst表示通信过程中数据的目的地址,ECAT_P,ECAT_PS,ECAT_PR表示数据包中的EtherCAT帧,ECAT_PS_M,ECAT_PR_M表示修改后的EtherCAT帧,oth_表示为了实施中间人构建的其他包.攻击者采用持续的发送数据包来充当主站从站来进行数据的篡改与转发.
3.2 实验
根据系统整体架构搭建的工业以太网下的七自由度机械臂平台如图7所示.其中工业型交换机是整个系统的连接枢纽,工作人员通过工业型交换机可以远程控制ROS-EtherCAT主站;ROSEtherCAT主站通过工业交换机线性连接FC1100以及4块EtherCAT从站多协议网关,构成EtherCAT总线通信系统,并且有1块EtherCAT从站多协议网关通过CAN总线连接七自由度机械臂.攻击者通过工业型交换机接入整个通信网络中,在图中并未展示出来.
本文提出的七自由度机械臂隐蔽攻击原理如图8所示.
图中攻击者主要通过对被攻击的机械臂运动学模型知识以及机械臂关节的控制模型知识构建一个类似于机械臂控制器的隐蔽控制器,其中隐蔽控制器的参数通过前面章节所提出的基于混沌理论的多种群粒子群的PID参数辨识算法获得.使用构造的PID攻击函数对控制器的输出添加一个偏差对机械臂的各个关节的实际输出造成影响,然后对各个关节的反馈值减去添加偏差应该产生的影响值,从而欺骗控制器,让机械臂系统认为当前机械臂的执行已经到达了目标位置及姿态,从而完成隐蔽攻击的目的.机械臂的运动规划模型主要在攻击的时候让机械臂的位姿到达指定的攻击姿态,达到预期的攻击效果.为各个关节的实际输出值,其中n=7,为各个关节的反馈欺骗值,其中n=7.
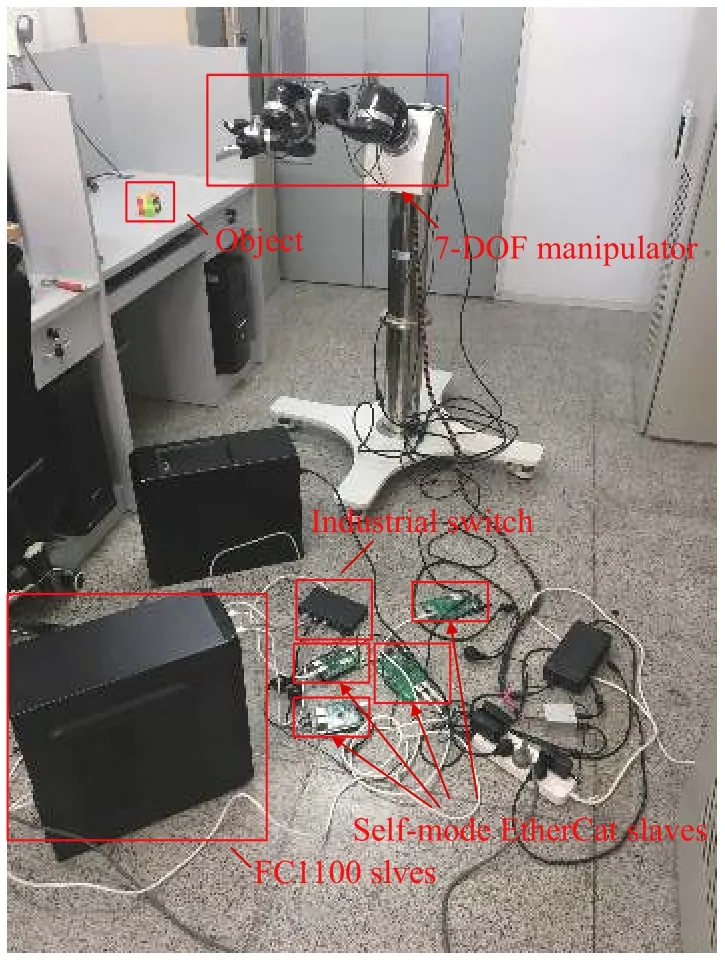
图7 七自由度机械臂系统平台Fig.7 7-DOF manipulator system platform
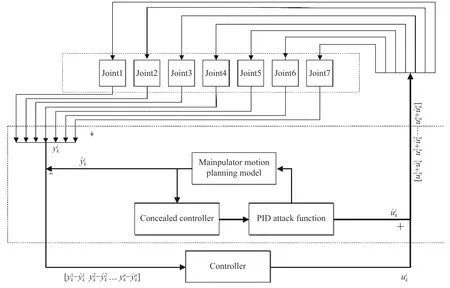
图8 七自由度机械臂隐蔽攻击原理图Fig.8 7-DOF manipulator covert attack schematic
首先从协议的角度对七自由度机械臂展开攻击,因为EtherCAT协议对于拒绝服务攻击(Denial of service, DoS)没有任何抵抗措施,因此本文进行EtherCAT协议攻击的部署相对简单.EtherCAT协议在部署过程中,只有主站能够修改从站的状态机状态,而EtherCAT从站只有在运行状态才能进行周期性通信过程,因此对EtherCAT从站状态机进行攻击会导致机械臂无法进行正常工作,这种攻击很容易被操作人员发现或者被入侵检测系统检测到.本文根据EtherCAT主从通信过程编写了一个可以攻击同一网段下的任一从站的状态机攻击程序,攻击过程及效果如图9所示.
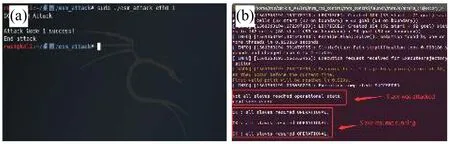
图9 状态机攻击.(a)状态机攻击执行图;(b) ROS-EtherCAT 主站状态检测Fig.9 State machine attack: (a) state machine attack execution diagram;(b) ROS-EtherCAT master status detection
从图中可以看到攻击期间,ROS-EtherCAT主站检测到了有从站没有进入运行状态,主站读取从站中的映射值出现了错误,当停止了状态机攻击之后,主站将从站的状态由错误状态恢复至正常运行状态,这种攻击方式可以直接造成机械臂系统无法进行正常的操作而保持上次正常规划执行完的位姿,但很容易被操作人员发现.
正弦攻击具有较好的隐蔽性,一般的入侵检测系统很难检测到正弦攻击造成的异常.正弦攻击的幅度值以及频率值都能够改变,对其进行傅里叶变换分析可以发现其能量分布极其集中,因此能造成更强的攻击后果,本文在七自由度机械臂上同样构建了正弦攻击.正弦攻击下的效果图如图10所示.
从正弦攻击与正常工作下的机械臂的速度曲线上可以看到,正弦攻击下速度出现明显的频率变化以及幅度变化,在位置曲线上有明显的波动出现,而正常工作下的速度曲线以及位置曲线都很平滑.并且在ROS-EtherCAT主站上可以看到控制系统报出执行出错的重大错误,机械臂并未按照正常的轨迹规划去执行.
由于EtherCAT通信网络上有多个EtherCAT从站设备,导致数据量相比单个设备来说要多很多,因此,需要分析数据结构,找出七自由度机械臂相应数据,对于机械臂数据的分析假设攻击者已经获得了部分关于机械臂控制器的知识,如图11所示,从抓取的网络包中,分析属于机械臂的通信数据,其中红色方框中为七自由度机械臂通信时的一帧数据.
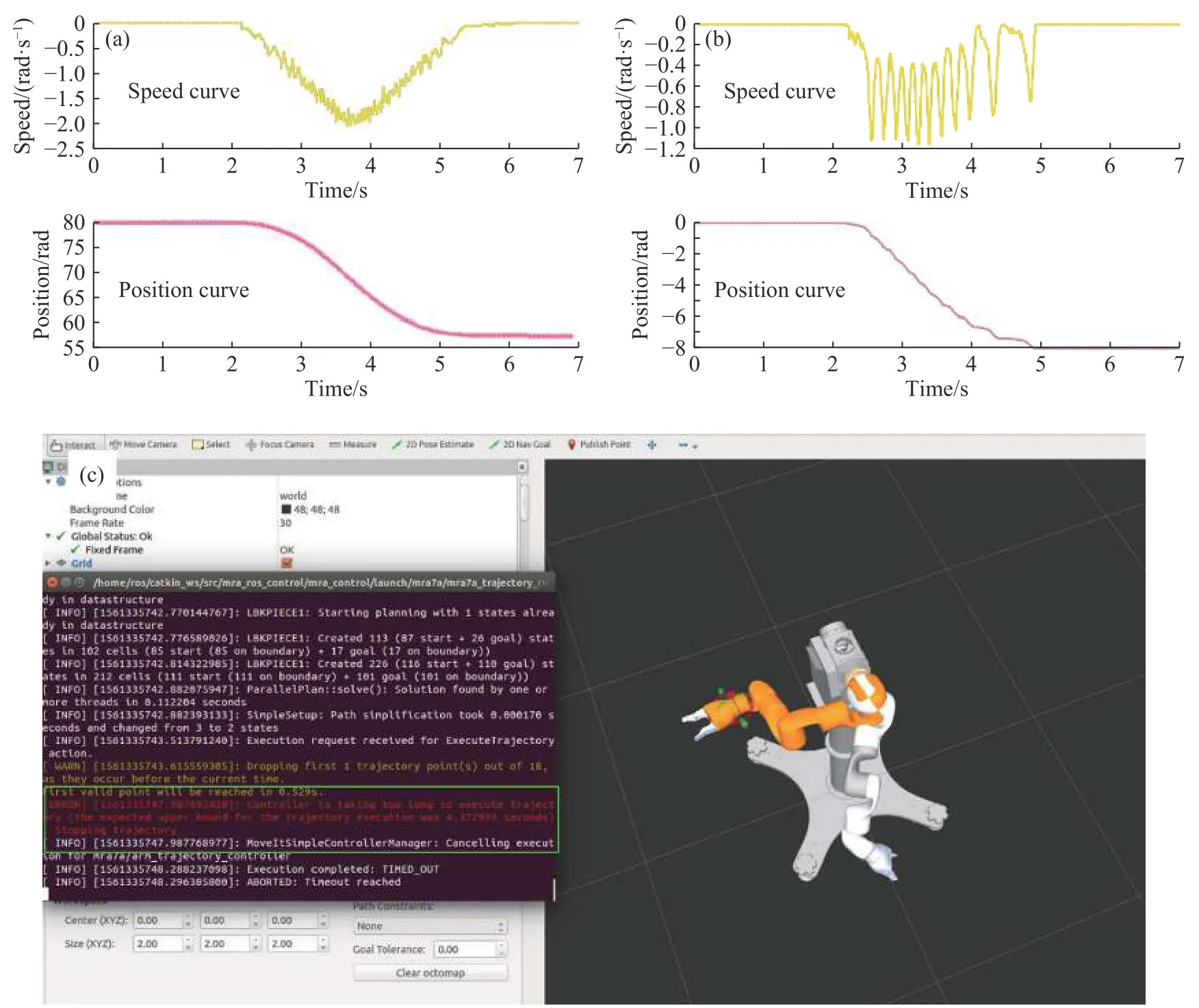
图10 正弦攻击.(a)正常工作下的速度位置曲线;(b)正弦攻击下的速度位置曲线;(c) ROS-EtherCAT主站状态Fig.10 Sinusoidal attack: (a) speed position curve under normal working; (b) speed position curve under sinusoidal attack; (c) ROS-EtherCAT master status
从数据的传输格式来看,EtherCAT上传输的数据采用的是大端模式,七自由度机械臂上CAN总线数据按照帧格式可以看到数据为帧ID,为0x107, 数据长度(Data length count, DLC)为 0x06,接下来的为数据区,数据分别为0x05、0x9c、0x34、0x16、0x00、0x00、0x00、0x00.基于图11(a)分析得到的EtherCAT总线传输的数据格式,结合关节控制器内存控制表信息(图11(b)),根据提出的多种群粒子群的七自由度系统辨识算法对七自由度机械臂系统进行参数辨识.首先,根据上述得到的传输数据将群体中的n个粒子随机初始化到解空间,划分群体为多个种群,通过适应度函数来计算每个子群中粒子对应的适应值,然后主种群、从子群更新,计算从子群中每个粒子的适应度函数值,判断当前位置是否为优于全局最优值.需要辨识的参数有42个,通过上述过程得到相应的最优值.表2列出了关节6和关节7参数辨识结果,其中位置PID参数为外环控制关键参数,速度PID为内环控制关键参数,位置外环参数是速度内环的输入.从真实值和辨识值之间的对比,可以看到本文提出的系统辨识算法辨识效果良好.
根据本文提出的七自由度机械臂隐蔽攻击模型,七自由度系统辨识参数以及七自由度机械臂的运动学模型构建出的攻击,攻击函数采取正弦攻击函数,攻击效果如图12所示.从图12(a)中可以看到ROS-EtherCAT主站在攻击者进行隐蔽攻击时并未检测到任何异常,并且认为机械臂已经到达了目标位姿,而图12(b)是机械臂的真实位姿状态,和图12(a)中显示的位姿有明显差异,从而验证了本文提出的七自由度机械臂隐蔽攻击技术的实施具有良好的隐蔽性,根据需要造成的破坏大小构造出攻击函数能够造成很严重的后果.
从不同的角度对比上述攻击,如表3所示.本文提出的七自由度机械臂隐蔽攻击技术在实施上比较复杂,但是在保证破坏性的情况下具有较好的隐蔽性.
4 结论
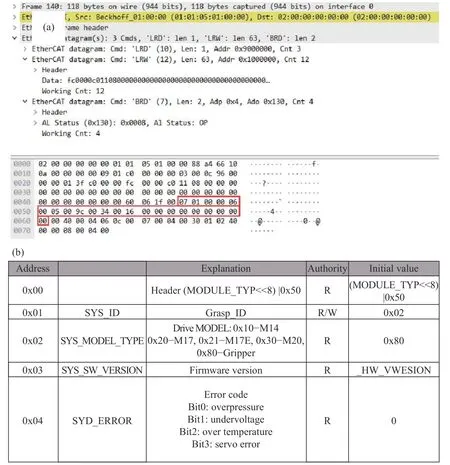
图11 七自由度机械臂通信数据.(a)通信数据格式;(b)机械臂部分内存表信息Fig.11 7-DOF manipulator communication data:(a) communication data format;(b) part of memory table information of the robot arm
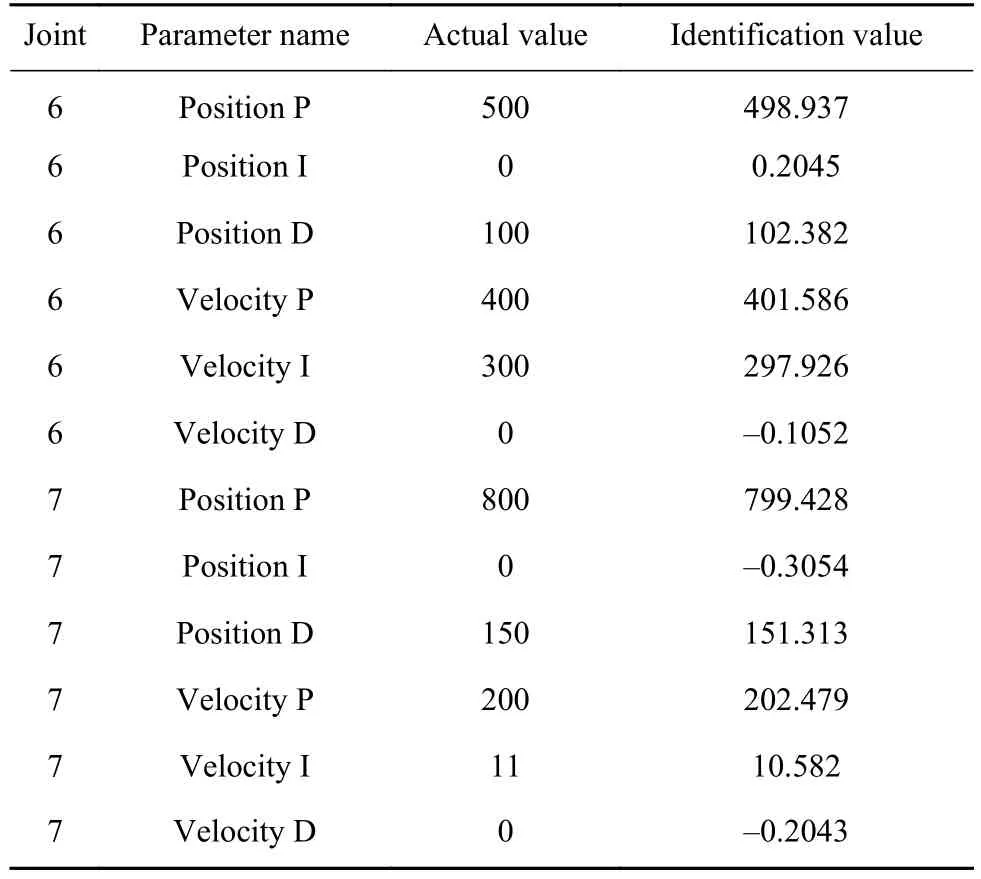
表2 部分辨识值和真实值Table 2 Partially recognized value and true value
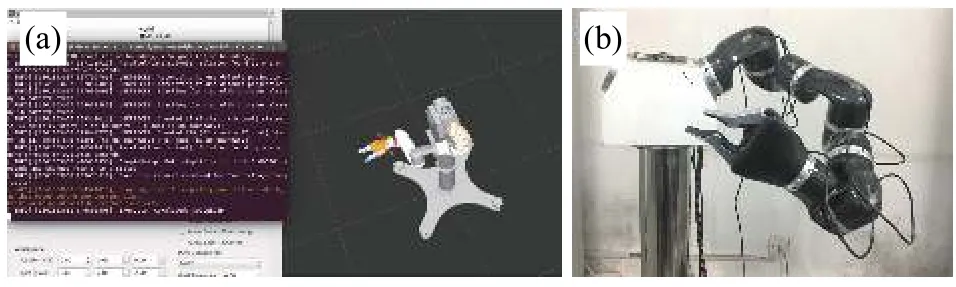
图12 隐蔽攻击.(a) ROS-EtherCAT 主站状态;(b) 机械臂真实状态Fig.12 Covert attack:(a) ROS-EtherCAT master status;(b) manipulator real state
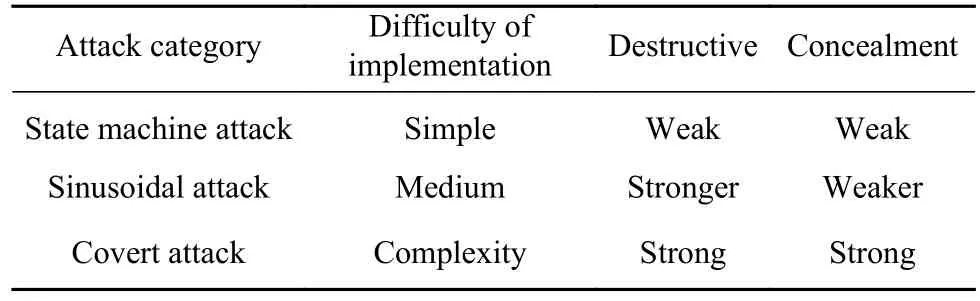
表3 机械臂攻击对比Table 3 Manipulator attack comparison
本文提出了基于七自由度机械臂的隐蔽攻击方法.对七自由度机械臂进行了运动学规划建模,并对粒子群算法进行了研究;提出了基于混沌理论的多种群粒子群优化的七自由度PID参数辨识算法.设计了隐蔽攻击系统架构并搭建了实验平台,利用所提出的算法对本文中的机械臂控制系统的参数进行辨识,使用辨识的参数结合隐蔽攻击原理进行了攻击实验,并且将所提出的隐蔽攻击技术与协议的状态机攻击以及传统的正弦攻击进行了比较.实验表明所提出的七自由度机械臂的系统辨识算法能够较好的辨识系统参数,并且能很好的应用于机械臂的隐蔽攻击中,验证了所提方法的可行性.本文所构建的攻击实验平台为机械臂的攻防试验提供了物理基础,该平台对于类似研究者有一定的借鉴意义.
值得注意的是,本文在机械臂的隐蔽攻击实验中,仍然存在许多不足:机械臂的控制中由于传感器的精度问题,导致控制精度不是很高;本文并未对七自由度机械臂的动力学进行研究,因此提出的基于混沌优化多种群粒子群七自由度机械PID参数辨识算法并未对机械臂的动力学进行辨识.
猜你喜欢
数学年刊A辑(中文版)(2022年1期)2022-08-20
数学年刊A辑(中文版)(2021年4期)2021-02-12
中国水能及电气化(2019年10期)2019-11-07
机电信息(2018年36期)2018-12-21
电子制作(2018年11期)2018-08-04
组合机床与自动化加工技术(2017年1期)2017-02-15
电子制作(2017年23期)2017-02-02
中央民族大学学报(自然科学版)(2016年2期)2016-06-27
空间控制技术与应用(2015年2期)2015-06-05
舰船科学技术(2015年8期)2015-02-27