基于脉冲声分离的刚性球散射声控制
2021-01-02 09:24冉12王晓琳1军12
应用声学 2021年6期
王 冉12 王晓琳1 杨 军12
(1 中国科学院声学研究所 北京 100190)
(2 中国科学院大学 北京 100049)
0 引言
有源噪声控制(Active noise control,ANC)通常以抵消总声压为控制目标,而对于船舶、舰体等大型散射体来说,能对其散射声进行有源控制是更加实用且迫切的。通过控制船舶、舰体等的散射声,可以使其躲避声呐系统的追踪,实现“声学不可见”。
针对散射声的有源控制问题,Bao等[1]提出了利用双层压电聚合物进行水下有源吸声的方法。该方法通过调节施加在压电复合材料上的电压实现对反射声的吸声控制。La fleur等[2]指出单层压电声学结构可以实现对反射声或透射声的控制,而双层压电声学结构可以同时对反射声和透射声进行控制。除了以上利用压电材料对散射体表面阻抗进行调节,从而降低散射声的方法,还可通过先将散射声分离,再对其进行控制的方式实现散射声降噪。由于空间中散射声与入射声混叠在一起的,如何实现散射声分离是进行散射声降噪的关键。Friot等[3−4]通过设置内层传感器和外层传感器对散射体的散射声进行估计以实现散射声分离,再对其进行有源控制。由于该方法需要设置大量的传感器用于估计散射声,因此不适用于分离大型散射体的散射声。Han等[5]通过在管道中一端发射脉冲声,另一端放置反射材料,直接在时域观测材料的脉冲散射声,再对脉冲散射声进行有源控制,实现散射声的分离和降噪。同时,Han等[6]利用格林函数的梯度作为观测点处总声压到误差传声器处散射声压的传递函数,实现对刚性球散射声的估计,并对估计出的散射声进行有源控制,最终实现三维空间中散射声的降噪。
考虑脉冲信号是一种常用的水下探测信号,本文提出了一种基于脉冲声的三维空间中散射声分离方法,以刚性球为研究对象,通过对比有无刚性球时传声器采集脉冲信号的差值确定刚性球散射声的大小,实现刚性球散射声与声源直达声的分离。利用前馈、固定系数控制方式对分离出的刚性球散射声进行有源控制,实现刚性球散射声的降噪,使刚性球在误差点处“声学不可见”。全消声室中实验结果表明,700~1000 Hz范围内,有源控制开启后,双通道散射声的平均降噪量大于5 dB,多通道散射声的平均降噪量大于8 dB,且误差传声器处采集的残余声场信号与无刚性球时采集的初级声场信号基本一致,实现了刚性球散射体在误差传声器处“声学不可见”。此外,参考传声器位置的布放问题也在本文做了讨论。
1 控制理论及方法
前馈、固定系数有源控制通过离线辨识次级通路传递函数,结合维纳滤波实现降噪,对初级噪声平稳的系统来说,是一种高效的控制方法[7]。本文对刚性球的散射声进行双通道前馈、固定系数有源控制,采用维纳解计算出控制器的滤波系数并对参考信号进行滤波输出,抑制误差传声器处刚性球的散射声,实现刚性球在误差传声器处“声学不可见”。
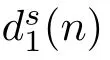
图1 双通道前馈固定系数有源控制系统示意图及简化框图Fig.1 Schematic and equivalent block diagram of two-channel feedforward and fixed-coefficient filter ANC system
定义控制系数矩阵w的阶数为I,且其有如下形式:

式(1)中,w1,i为次级声源1控制系数w1的第i阶控制系数,w2,i为次级声源2控制系数w2的第i阶控制系数。定义期望散射声信号矢量ds(n)和误差信号矢量e(n)有
因此可得

式(4)中,r(n)为滤波-x信号矢量,其有如下形式:

其中,r11(n)=x(n)∗h11(n),r12(n)=x(n)∗h12(n),r21(n)=x(n)∗h21(n),r22(n)=x(n)∗h22(n)。
对误差信号矢量e(n)利用最小均方误差准则进行求解,可得到控制系数矩阵的最优解,即维纳解:

其中,R为滤波-x信号的自相关矩阵,R=E(r(n)rT(n)),P为滤波-x信号与期望散射声信号之间的互相关向量,P=E(ds(n)r(n))。
此外,为评价刚性球散射声的降噪效果,定义散射声降噪量公式如下:

式(7)中,esl(n)为控制后的散射声压,其通过控制后误差传声器采集的残余声场信号与无刚性球时采集的初级声场信号做差获取,l=1或2,代表误差传声器1或误差传声器2。
2 实验分析
2.1 双通道刚性球散射声分离及控制
全消声室中,双通道刚性球散射声分离、控制实验系统,如图2所示。实验中,半径0.25 m的刚性球悬挂于高1.2 m的刚性支架上,初级源距离刚性球表面3.4 m。参考传声器距离初级源中心0.35 m,用于采集参考信号。两个误差传声器分别为误差1和误差2,且距刚性球表面均为1.2 m。误差1与误差2之间相距0.1 m且位于同一水平面。两个次级声源分别为次级源1和次级源2,分布于刚性球两侧相距2.6 m,且次级源1与误差1之间的距离和次级源2与误差2之间的距离相等,同为1.65 m。控制芯片为TMS320C6678,采样频率为8 kHz。

图2 双通道前馈、固定系数有源控制实验系统Fig.2 Experiment system of two-channel feedforward and fixed-coefficient filter ANC system
初级声源发射的初级噪声信号为包含一个单周期正弦信号的脉冲,脉冲总时长5 s,采样率16 kHz。以1000 Hz脉冲信号为例,其时域波形如图3所示,其中图3(a)为完整脉冲信号,图3(b)为展开的脉冲信号。实验中共测试了6个频点,各脉冲信号中包含的单周期正弦信号频率分别从700~1000 Hz。
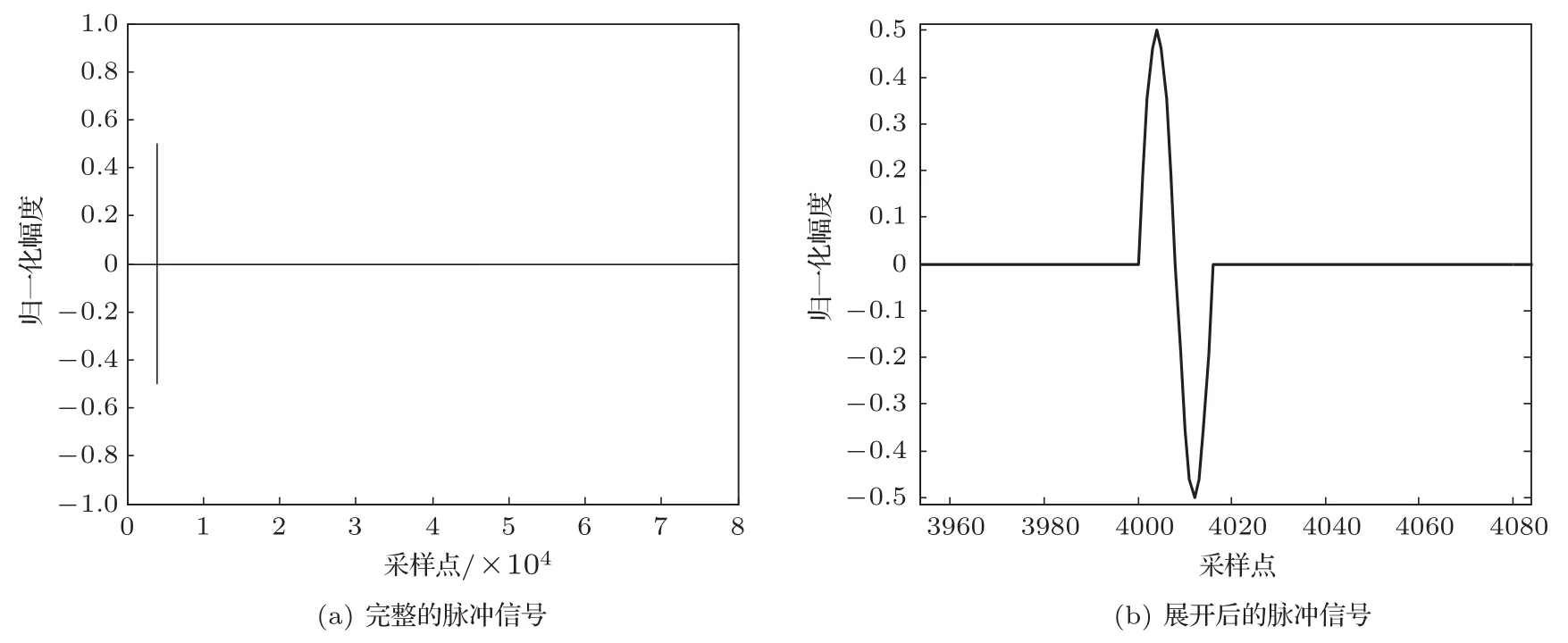
图3 1000 Hz脉冲信号Fig.3 Impulsive signal at 1000 Hz
实验中,首先对比有无刚性球时两个误差传声器采集的初级噪声信号,以1000 Hz为例,结果见图4。图4中的3条曲线分别代表无刚性球时误差传声器采集的信号(红色实线)、有刚性球时误差传声器采集的信号(绿色虚线)以及二者做差之后得到的刚性球散射声信号(黑色点划线)。从图4中信号波形可以看出,同一误差传声器处采集的两组信号波形中包含很多尖峰和起伏,其中最高的尖峰均为初级源的直达声。当刚性球存在时,误差传声器采集的信号中包含声源的直达声、环境反射声以及刚性球的散射声;当不存在刚性球时,误差传声器采集的信号中只包含声源的直达声和环境的反射声。图中绿色线框圈出的位置,前后采集的两组信号波形不同,而带来此变化的因素是刚性球的有无,因此该位置即为刚性球散射声出现的位置。由于全消声室中存在其他散射体,如图2中的声源支架、地面铁架等,因此波形中前后变化一致的起伏均为环境的反射。
对比图4中误差传声器采集的信号波形,可将刚性球的散射声信号进行定位,即图中电压值不同的采样点位置;利用有刚性球时误差传声器采集的信号与无刚性球时误差传声器采集的信号做差,确定刚性球散射声的幅值大小;对散射声信号进行截取,获取只包含刚性球散射声的信号并将其作为待控制的期望散射声信号,如图4(a)和图4(b)中黑色点划线所示。值得说明的一点是,由于传声器前后采集的数据幅度会出现小幅波动,导致有刚性球和无刚性球时采集的信号波形并不是完全重合的。直接利用两组数据相减得到的信号起伏变化,刚性球散射声对应的位置不能清晰显示。因此,本文将相减后的信号中散射声对应采样点的幅值保留,其他采样点的值直接置零,得到如图4中黑色点划线所示的散射声信号波形。
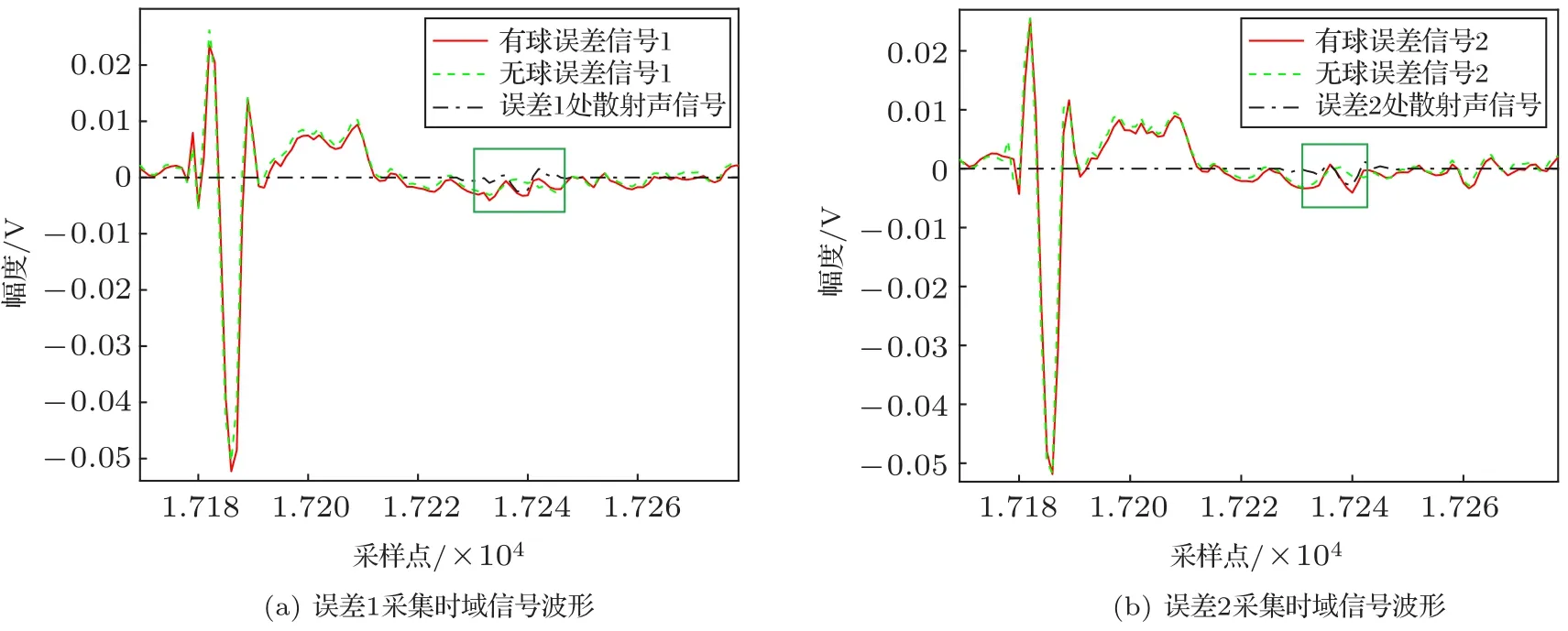
图4 1000 Hz有无刚性球时误差传声器采集信号的时域波形Fig.4 The time-domain waveform of the error signal with and without the rigid sphere at 1000 Hz
获取到期望散射声信号后,利用第1节中公式(6)进行滤波器设计,以实现刚性球散射声降噪控制并在DSP实验平台上进行实验验证。同时,在求解控制系数时采用正则化方法以保证算法的鲁棒性,正则化参数设置为10−4。以700 Hz以及1000 Hz信号为例,有源控制开启前后,两个误差传声器采集的时域信号波形如图5所示。
图5中误差传声器采集的时域信号波形各包含3条曲线,分别对应无刚性球信号、有源控制开启前信号和有源控制开启后信号,且有源控制开启前后,刚性球均存在。通过对刚性球散射声进行控制,可以抑制散射声的强度。因此,控制开启后的波形中,散射声所在位置的信号幅度应得到衰减。如图5中绿色线框圈出的位置,即刚性球散射声对应的位置,信号幅度均小于有源控制开启前,表明刚性球的散射声得到了很好的抑制。同时,为实现刚性球在声场中“声学不可见”,控制后的信号波形应与无刚性球时采集的信号波形幅度一致。从图5中两个误差传声器采集的控制开启后信号与无刚性球时采集的信号幅度对比可以看出,二者基本相同,即实现了刚性球散射体的“声学不可见”。此外,800 Hz以及900 Hz的实验结论亦与上述结论相同,本文将不再单独给出其实验结果。
图5的时域波形结果,只验证了散射声的幅度得到衰减,为客观评价散射声的降噪效果,利用第1节中公式(7)计算散射声的降噪量,结果见表1。从表中计算结果可以看出,除800 Hz以外,其余频点的平均降噪量大于7 dB。800 Hz的降噪量偏小是由于刚性球的散射声截取不准确,加之该频点可能位于声场的谷点导致的,但其他频点处良好的降噪效果依然验证了本文所提分离方法和实验系统的有效性。

表1 双通道散射声有源控制降噪量Table 1 Reduction of scattered sound field of two-channel ANC system
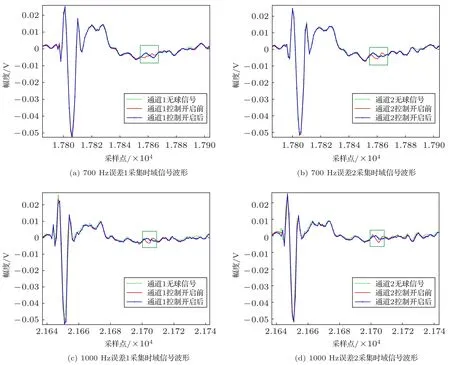
图5 700 Hz及1000 Hz有源控制开启前后误差传声器采集信号的时域波形Fig.5 The time-domain waveform of the error signal before and after the active control at 700 Hz and 1000 Hz
同时,考察不同参考传声器位置对控制算法的影响。实验中,分别在距离声源1 m和1.5 m位置处各放置一个参考传声器用于拾取参考信号,参考传声器与声源中心在一条直线上,如图2中1、2位置标记处;随后利用第1节中公式(6)进行滤波器设计并进行降噪控制,双通道降噪量结果见表2。

表2 不同参考信号条件下双通道散射声有源控制降噪量Table 2 Reduction of scattered sound field of two-channel ANC system with different reference signal
从表2中降噪量数值可以看出,变换参考传声器的位置对整体降噪效果有影响且随频率变化而变化。因此在实际工程应用中,在保证该降噪系统满足因果性的条件下,可以通过调节参考传声器的位置以获取不同频率条件下更好的散射声降噪效果。
2.2 多通道刚性球散射声分离及控制
在全消声室中对刚性球的散射声进行多通道有源控制。该实验系统中采用8元扬声器阵列作为次级源,并利用Media Matrix Octopower 850型功率放大器驱动该次级源阵列。初级源为Hivi H5音响,距离刚性球中心3.55 m,高0.9 m;次级源阵列位于刚性球的后上方,距离刚性球后表面0.64 m,高1.5 m;刚性球悬挂于高1.2 m的支架上,中心距离地面0.9 m;初级源、次级源阵列与刚性球的中心在一条直线上。1个参考传声器放置于初级源前0.35 m处,3个误差传声器放置于初级源与刚性球之间,距离次级源1.85 m,高1 m,间距0.08 m,且中间位置处的传声器与初级源中心在一条直线上。实验中,测试频率从700 Hz至1000 Hz,图6为实验系统以及次级源阵列图。
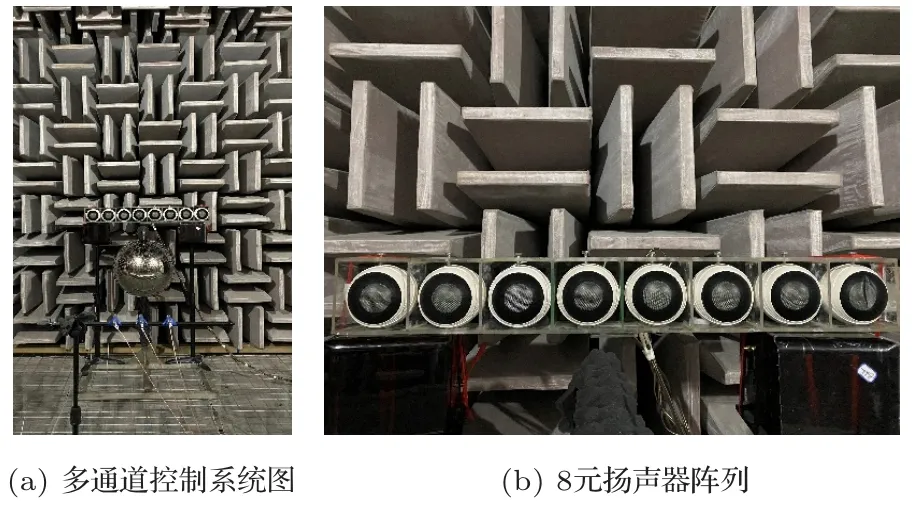
图6 多通道前馈有源控制系统图及次级源阵列Fig.6 Experiment system of multi-channel feedforward ANC system and the secondary source array
刚性球的散射声亦通过上述分离方法进行分离,多通道有源控制开启前后,位于中间位置处的误差传声器采集的时域信号波形见图7,该误差传声器对应的数据通道为通道2。图中绿色线框圈出的位置即为刚性球散射声出现的位置。图中的信号波形表明,800 Hz以及1000 Hz条件下,多通道有源控制开启后,刚性球的散射声幅度均得到了衰减,并且控制后的散射声信号波形与无刚性球时该误差传声器采集的信号波形基本一致。因此,本文搭建的多通道散射声控制系统同样可以实现刚性球散射声的降噪。此外,其余频点以及其余通道的波形曲线与图7中结果相近,文中不再单独给出。

图7 800 Hz及1000 Hz有源控制开启前后误差传声器采集信号的时域波形Fig.7 The time-domain waveform of the error signal before and after the active control at 800 Hz and 1000 Hz
同时,计算降噪量以评价该多通道控制系统的降噪性能,结果见表3。图中结果显示700~1000 Hz范围内,平均降噪量大于8 dB,该降噪量数值大于双通道控制系统的降噪量。因此,采用多通道控制系统不仅可以实现区域性的降噪,而且可以获得更大的降噪量。

表3 多通道散射声有源控制降噪量结果Table 3 Reduction of scattered sound field of multi-channel ANC system
3 结论
脉冲声是一种典型的探测信号,在船舶或舰体的声呐系统中具有重要应用。本文提出了一种基于脉冲声的三维空间中散射声分离方法,该方法通过对比有无散射体时传声器采集脉冲信号的差值确定散射声的大小,实现散射声与声源直达声的分离。利用前馈、固定系数控制方式对分离出的散射声进行有源控制,抑制散射声,使散射体在观测点处“声学不可见”。以刚性球为研究对象,对其散射声进行分离和降噪,并在全消声室中进行测试以验证本文所提分离方法和有源控制系统的有效性。实验结果表明,700~1000 Hz范围内,尽管散射声出现的位置和幅度均不同,但有源控制开启后,双通道散射声的平均降噪量均大于5 dB,多通道散射声的平均降噪量大于8 dB,且误差传声器处采集的残余声场信号与无刚性球时采集的初级声场信号基本一致,实现了刚性球在误差传声器处“声学不可见”。同时,由于本文采用前馈控制方式,因此在工程应用中可通过不断变换参考传声器的位置以获取不同测试频率条件下更好的散射声降噪效果。
本文采用的基于脉冲声分离散射声的方法需要移走散射体对声场进行测量,当散射体不易移动时,可通过设置触发并进行时域滤波的方式获取散射声。但是,当误差传声器固定位置不理想或实验环境复杂时会导致散射声获取不准确、参考信号与误差信号之间相关性降低,进而影响散射声的控制效果。此外,连续声入射以及非刚性散射体的散射声分离、控制问题还需进一步研究。
猜你喜欢
现代临床医学(2022年5期)2022-09-28
电讯技术(2022年1期)2022-02-12
昆明医科大学学报(2021年4期)2021-07-23
计测技术(2021年2期)2021-07-22
无损检测(2019年11期)2019-11-20
石油地球物理勘探(2017年2期)2017-11-23
城市勘测(2016年2期)2016-08-16
电子设计工程(2015年16期)2015-02-27
演艺科技(2013年2期)2013-09-19
城市道桥与防洪(2013年8期)2013-03-11