
多功能跑步机变频器直接转矩控制优化
2020-12-25 12:31刘蓉
机械设计与制造 2020年12期
刘 蓉
(成都大学,四川 成都 610106)
1 引言
随着经济的不断发展,人们生活水平不断提升,健康观念也随之逐步提高,人们越来越重视自己的身体健康问题,通过参加各种健身项目来提高自身免疫力,增强身体锻炼[1]。其中,室内多功能跑步机成为人们健身的首选器械。多功能跑步机的运行速度影响人们健康健身的重要因素,运动不当易造成膝关节损伤、半月板磨损等问题,所以合适的速度控制问题成为目前该领域研究的热点问题[2]。多功能跑步机中控制运行速度的机械为变频器,通过改变发动机转矩及转速的物理元件,根据机械设备输入轴的传动比例条件,固定或改变分档输出轴设备的传动。标准的多功能跑步机变频器由变速传动机、动力输出机构和调节操纵机共同组成。多功能跑步机依靠跑步带、跑步者脚之间滑动摩擦力带动变频器的运动,借助变频器调速处理控制跑步机行进状态[3]。然而,随着跑步机应用量的增加,变频器直接转矩控制受到一定环境因素的影响,从而难以执行较高等级的调速控制指令,造成使用寿命时间不断下降。
基于此,提出多功能跑步机变频器直接转矩控制优化。对多功能跑步机变频器直接转矩控制的工作原理进行分析,对其驱动参数进行合理设置,引入卡尔曼滤波算法对变频器直接转矩控制进行优化。实现了多功能跑步机变频器直接转矩控制的优化。
2 多功能跑步机设计
跑步机类型主要包括磁控跑步机和电控跑步机。其中,磁控跑步机是出现最早的跑步机,其不需要动力,依靠调节跑步机内部磁铁距离调整跑步机阻力,使用时靠脚蹬完成运动[4]。此类跑步机运动协调性较差,健身效果不理想。电动跑步机依靠电机运转带动跑步机工作,其运行协调性较好,人体健身效果明显。随着科技的不断发展,人们的需求不断提高,对跑步机功能的要求越来越多。故设计了一种多功能跑步机,其基本结构,如图1 所示。多功能跑步机主要包括电机、变频器、底架、扶手以及调速显示屏等构成。该多功能跑步机的显示器为5 英寸LCD 多语言变蓝屏,可显示跑步机运行速度、燃烧的卡路里、心率以及运动数据等;马达峰值为5.0 HP,坡度为(0~15)°坡度,跑台尺寸为(600×1500)mm,该跑步机设置了NFC 及蓝牙功能,可快速连接其他电子设备[5]。

图1 多功能跑步机结构图Fig.1 Structure Diagram of Multifunction Treadmill
3 多功能跑步机变频器直接转矩控制
在设计的多功能跑步机中,主要对多功能跑步机变频器的控制进行研究,保障多功能跑步机交流电机的平滑调速,提升跑步机使用者的体验感。
3.1 变频调速工作原理
在多功能跑步机调速控制系统中,利用变频器对其进行调速可实现跑步机的连续调速、电机正反转切换,且其运行效率高。跑步机中异步电动机的同步转速小于跑步机的同步转速,其磁极个数和电源频率决定了异步电动机的同步转速[6]。
假设S 为跑步机电机的同步转速,则存在:

式中:f—电源频率;c—磁极数量。
异步电机的转差率可定义为:

式中:K—电动机转速。
则多功能跑步机的实际转速为:

此时,通过调节电源频率、异步电机的转差率以及磁极数量可对调节多功能跑步机的速度,实现对其控制。
3.2 变频器直接转矩控制驱动参数
多功能跑步机变频器控制主要包括U/F 控制方式、矢量控制方式以及直接转矩控制方式[7]。其中,直接转矩控制是通过空间矢量、定子磁场定向分析的方法控制跑步机变频器。在不同档位变动情况下,多功能跑步机传输带的行进速率随之发生改变,此时变频器装置呈现明显的多极化调速控制状态。变频器直接转矩控制驱动参数有效描述了换挡电机的调速性能,可作为多功能跑步机变频器控制标准。对多功能跑步机的变频器直接控制转矩驱动参数进行设定,如表1 所示。
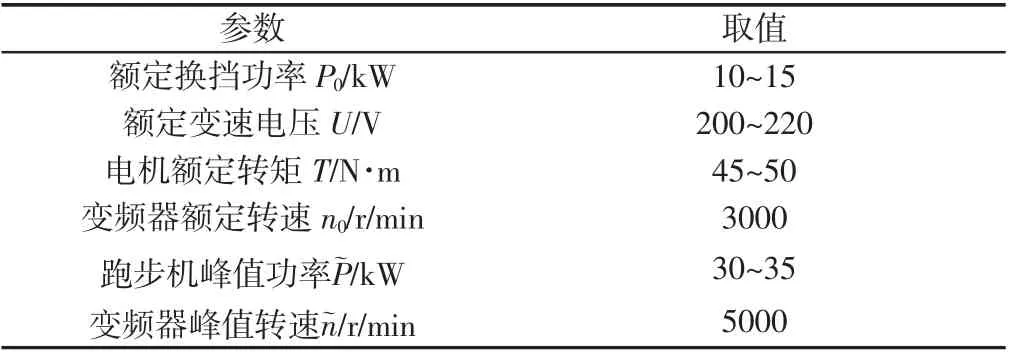
表1 多功能跑步机变频器直接转矩控制驱动参数Tab.1 Control Driving Parameters of Multifunction Runner Inverter
额定换挡功率、额定变速电压、电机额定转矩、变频器额定转速均与跑步机调速控制性能相关物理量,其不会随外界影响条件的改变产生变化。跑步机峰值功率、变频器峰值转速属于变动型物理量,可随控制电压量的改变产生变化。控制的电压量实际数值越大,峰值功率与峰值转速的数值水平也随之增高,反之则降低[8]。根据上述物理量的设置,可将多功能跑步机变频器直接转矩控制驱动参数定义为:

式中:δ0—跑步机变频器控制装置额定参数权限;δ~—跑步机变频器控制装置的峰值参数权限。
在上述参数设定基础上,对多功能跑步机变频控制电路进行设计,为多功能跑步机运行提供需要的驱动信号。多功能跑步机变频器控制电路设计,如图2 所示。

图2 控制电路结构图Fig.2 Structure Diagram of Control Circuit
该控制电路主要由主控电路、主电路驱动电路以及信号检测电路等构成。其中,主控电路可输入变频器指令信号,调节运转速率等。主电路驱动电路主要为逆变电路的换流器提供驱动信号;信号检测电路主要检测电压、温度等。
3.3 多功能跑步机变频器直接转矩控制优化
多功能跑步机直接转矩控制是以测得的电动机电流和直流电压作为输入,从而使其运行时的转矩较为准确。其在坐标变换矢量控制基础上扩展到弱磁调速领域。其控制主要采用定子磁场定向,其不受变频器转子参数变化的干扰,提高多功能跑步机控制系统的鲁棒性[9]。
将多功能跑步机的电压以微分的形式进行表述,即:

式中:Rj—变频器的电阻值;ij—增益矩阵。
采用卡尔曼滤波算法[10]对多功能跑步机直接转矩进行优化。获取多功能跑步机变频器直接转矩状态量,即:

式中:a(b)—不可观测的状态变量;t—观测时间。
对上述获取的变频器直接转矩状态量误差协方差,即:

式中:χb—卡尔曼滤波增益;Ht—观测矩阵;Q—测量噪声。
获取卡尔曼滤波的增益为:

式中:E—高斯白噪声。
在此基础上,获取其更新矩阵,即:

式中:Mb—方差矩阵。
最后,得到多功能跑步机变频器直接转矩状态变量的滤波值的更新值,此更新值实现了多功能跑步机变频器直接转矩控制优化,即:

4 仿真实验分析
4.1 仿真环境
实验选取两台完全相同的多功能跑步机作为实验对象,在相同实验环境下,进行仿真实验。实验操作系统选择Windows XP,运行内存为8GB,在Maltble 平台进行实验。实验环境,如图3 所示。


图3 实验环境图Fig.3 Experimental Environment
4.2 仿真参数

表2 实验参数Tab.2 Experimental Parameters
实验参数设置,如表2 所示。
在上述参数基础上,将所提方法设置为实验组、传统方法为对照组,控制其它影响因素保持不变,对两台跑步机变频器转矩进行跟踪确定其稳定性、直接转矩控制的调响应速度以及变频调速的精度对比。
4.3 实验结果分析
4.3.1 跑步机变频器直接转矩控制的稳定性分析
为了验证所提方法的科学有效性,实验分析了跑步机变频器期望转矩为20Nm 时,两台跑步机变频器直接转矩控制进行跟踪,观察其变化情况。其中,电机转矩脉动程度越稳定,表示其直接转矩控制效果越好。实验结果,如图4 所示。分析图4 可知,在相同实验环境下,两组跑步机变频器均可较好的实验转矩跟踪控制目标,但还存在一定差异。其中,实验组的电机转矩脉动程度较为平稳,稳定程度更好,而对照组的转矩脉动出现了不同程度的波动,存在一定的失稳现象。相比之下,实验组的电机转矩脉动程度较为平稳,稳定程度更好。这是由于所提方法采用卡尔曼滤波算法对多功能跑步机直接转矩进行优化,对获取的多功能跑步机变频器直接转矩状态等参数进行控制,进而提升了跑步机变频器转矩的稳定性。


图4 跑步机变频器转矩跟踪对比Fig.4 Comparison of Torque Tracking in Runner Converter
4.3.2 跑步机变频器直接转矩控制响应速度分析
为了验证所提方法的可行性,实验分析了两组实验的变频器直接转矩控制响应的速度,实验结果,如图5 所示。

图5 跑步机变频器直接转矩控制响应速度对比Fig.5 Comparison of Direct Torque Control Response Speed of Runner Inverter
分析图5 可知,在整个实验过程中,实验组直接转矩控制的响应速度较快,在0.45s 时完成了响应,而对照组直接转矩控制的响应速度较长,在约0.51s 时完成了控制响应;从图中曲线走势可以看出,实验组的跑步机变频器直接转矩控制响应速度始终较对照组响应快。这是由于所提方法对多功能跑步机的变频器直接控制转矩驱动参数以及控制电路进行设计,为多功能跑步机运行提供需要的驱动信号,可有效调节多功能跑步机运行速率,进而提高了变频器直接转矩控制的响应速度,验证了所提方法的可行性。
4.3.3 跑步机变频器变频调速精度
为了进一步验证所提方法的可靠性,实验分析了两组跑步机变频器在变频调速时的精度,实验结果,如表3 所示。

表3 跑步机变频器变频调速精度对比(%)Tab.3 Comparison of Frequency Conversion and Speed Regulation Accuracy of Treadmill Frequency Converter(%)
分析表3 中数据可知,随着实验迭代次数的不断增加,两组实验的变频调速精度随之发生改变。其中,实验组的变频调速精度最高约为98%,对照组的变频调速精度最高约为92%。相比之下,实验组的变频调速精度提高了约6%。这是由于实验组在进行变频调速时,采用卡尔曼滤波算法对多功能跑步机直接转矩进行优化,进而提高了多功能跑步机变频器变频调速的精度。
5 结束语
跑步健身可有效提高国民身体素质,增强身体的耐久力。为了能够使多功能跑步机运行速度适合人体健身需要,保护膝关节健康,以多功能跑步机变频器直接转矩控制参数作为驱动标准,引入卡尔曼滤波算法对其进行控制优化,实现了多功能跑步机变频器直接转矩控制优化,解决了跑步机变频器调速控制性能较差等问题,保护健身者在使用跑步机健身时的健康,且延长跑步机设备的平均使用寿命周期。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
电子设计工程(2022年15期)2022-08-17
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
科技创新与应用(2019年17期)2019-06-09
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
电子制作(2017年7期)2017-06-05
自动化博览(2014年4期)2014-02-28
