
TRIZ 理论在无人机集群发射回收装置设计中的应用
2020-12-25 12:30王文龙马明旭胡耀中朱杰夫
机械设计与制造 2020年12期
王文龙,马明旭,胡耀中,朱杰夫
(东北大学机械工程与自动化学院,辽宁 沈阳 110819)
1 引言
当今世界无人机技术发展迅猛,在军事、国防和民用领域的影响力不断扩大。现在无人机发射的主要方式是发射架弹射[4]、人工抛射、火箭助推发射[1]。回收的主要方式是伞降回收、撞网回收、钩绳回收、跑道回收[3]。此前某大学已经设计出一种发射回收一体化装置,为解决无人机在狭小空间和恶劣环境发射的问题提供了范例[7]。由于固定翼无人机体积小,单架无人机所能执行的任务有限,近些年来无人机集群协作技术开始被重视[2]。目前集群发射方式主要有多弹射架集群发射、火箭助推式连续发射、空中投放式发射。对于回收主要是采用自然地滑翔降落,然后进行人工回收。在集群发射回收上,大多采用发射时的“一次性”集群,即没有好的集群发射回收系统,更没有将返航的无人机进行存储补给的装置,能够为下一次集群做准备。
为此,我们拟设计出一种具有存储补给功能的无人机集群发射回收装置(即UAV cluster emission recovery device,简称UAV-CERD)。在设计过程中我们利用TRIZ 理论解决遇到的困难问题。我们采用其物理矛盾与技术矛盾分析的方法对UAVCERD 的设计进行分析,运用物-场分析、分离原理等方法找到矛盾的解决方案,最终解决了在设计UAV-CERD 过程中遇到的难题,研制了一种具有存储与补给功能的无人机集群发射回收装置。
2 系统矛盾分析
在TRIZ 理论中,工程中所出现的矛盾可以归为3 类:一类是物理矛盾,一类是技术矛盾,一类是管理矛盾。物理矛盾就是指系统中的问题由1 个参数导致的。其中的矛盾是,系统一方面要求该参数正向发展,另一方面要求该参数负向发展;技术矛盾就是指系统中的问题是由2 个参数导致的,2 个参数相互促进,相互制约;管理矛盾是指子系统之间产生相互影响。
2.1 UAV-CERD 系统功能分析
在寻求解决方案时,功能分析用于理清技术系统的主要功能以及各系统之间的关系,以便理解系统,找出系统的问题所在。
为实现无人机集群发射与回收,且能够对返航的无人机进行存储与补给。我们装置的系统总的分为发射部分、回收部分、存储部分。其中各部分都包含动力装置、支撑装置、引导机构与执行机构。
发射部分负责将无人机发射,其中发射的无人机来源于存储部分,回收部分负责将返航的无人机回收,调姿,并且送入存储部分。所以发射部分、回收部分至少有一个在工作,而存储部分在全过程中配合其他两部分执行发射回收。发射与回收运动要求精准可靠,所以我们需要设计引导机构使执行机构能够可靠的执行全过程,确保发射回收的成功。同时飞机入存储库与出存储库都需要可靠,所以设计引导机构使其能按照预定方案实现入出库动作。动力系统作为整个装置总能量的输出,为各执行机构顺利执行提供动力。所以必须考虑动力系统能量传递方式与所需动力的大小。系统的各部分及其设计要求,如图1 所示。根据系统各部分之间的功能要求与矛盾,我们进行分析。

图1 系统功能分析图Fig.1 System Function Analysis Chart
2.2 UAV-CERD 系统矛盾分析
2.2.1 物理矛盾
此装置旨为解决在恶劣环境与狭小空间中实现无人机的集群发射与回收,所以应该严格限制装置的尺寸。而现有的无人机发射装置、回收装置大都体积庞大。若设计一个一体化装置,将占据大量空间,而我们设计的主要目的是为解决在恶劣环境与狭小空间中进行无人机的发射回收。设计的主要物理矛盾在于空间限制与各系统完成任务都需要足够大的空间。解决物理矛盾的核心思想是实现矛盾双方的分离[8],TRIZ 理论解决物理矛盾的四大分离原理为空间分离、时间分离、条件分离和系统分离。对于此装置,当发射无人机时,发射系统工作,而回收系统没有进行工作,当无人机返航时,发射系统同样也没有发射任务。据此我们可以巧妙的利用各功能执行的时间差,根据时间分离的原理,将发射系统、回收系统相互分离。将其分成发射平台与回收平台,将支撑结构、导向结构合并为一个。发射回收系统在同一个导轨上的不同时间进行工作,如图2 所示。
机库作为存储装置时刻工作,为返航的飞机补给。所以可以利用空间分离的原理,将存储部分与发射回收架分开,这样更有利于存储部分对飞机的管理,且不对发射回收进行干涉。这样设计节省出大量的空间,而且更加方便各系统的工作。装置的发射回收架简图与机库简图,如图3 所示。
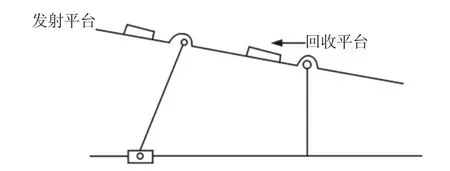
图2 装置发射回收架结构简图Fig.2 Structure Diagram of the Launch Recovery Frame

图3 机库简图Fig.3 Sketches of the Hangar
2.2.2 技术矛盾
(1)矛盾1:
由于发射系统与回收系统都需要进行动力供给。为此我们设想在整个装置上设计2 套动力系统分别驱动发射系统与回收系统工作。这种方案安全可靠,但是设计复杂,且占用空间太大。为此我们初步设想发射系统与回收系统共用一个动力系统,然而动力系统靠皮带传递动力,皮带只能与一个系统连接。由此产生发射系统获得动力则回收系统无法获取动力。发射系统回收系统相互制约。为解决这一技术矛盾,我们运用物-场分析的方法[6]。由TRIZ 理论可知技术系统中最小单元由2 个元素以及2 个元素间传递的能量组成,以执行一个功能。其中功能被定义为两个物质(元素)与作用于他们之间的场(能量)的交互作用,即物质1 通过能量作用于物质2,产生输出(功能)。在这里我们可以建立的物-场模型[9],如图4 所示。

图4 物-场模型Fig.4 Object-Field Model
在发射系统中S1-发射机构,S2-皮带,F-动场。回收系统中S1-回收机构,S2-皮带,F-动场。由于共用一个动力系统,所以2个技术系统中的F 为同一个动场,S2为同一个传动皮带。TRIZ 理论中物-场分析应用的过程中,由于所面临的问题复杂又包含广泛,物-场模型的建立使用有相当的困难,所以TRIZ 理论为物-场模型提供了成模式的解法,成为标准解,共76 个[9]。76 个标准解法可以分为5 类:物-场系统的建立与拆解;物-场模型的进化;向超系统与微观系统转化;检测和测量系统的标准解;采用标准解法的标准[7],如表1 所示。

表1 TRIZ 理论的76 个标准解类别及数量Tab.1 76 Standard Solution Categories and Quantities of TRIZ Theory
根据标准解的第一类[7],如表2 所示。我们采用向内部综合物-场转化,即给定一个物-场,但不服从给定的变化,给定问题条件中并不限制向现有物质中加入第三种介质,引入能够提高可控性或者具有所需性质的物-场的第三种介质来解决问题。为此,我们初步设想建立一个连接装置,该装置实现动力系统与发射系统或者回收系统的连接与分离,即将图4 物-场模型转化模型,如图5 所示。从而实现皮带既能给发射系统提供动力又能给回收系统提供动力,使其进行工作,达到了发射系统与回收系统共用一个动力系统的目的。

表2 第一类应用标准解的策略与准则系统Tab.2 Strategy and Criteria System for the First Class of Applied Standard Solutions

图5 物-场模型转化Fig.5 Transformation of Matter-Field Model
(2)矛盾2:
发射系统与回收系统共同在滑轨上运动,会出现相互干涉的矛盾,当回收系统的回收平台回收飞机时会与发射系统的发射小平台相撞。为了解决两个系统在同一二维平面内相互运动的干涉这一技术矛盾。我们参考TRIZ 理论中解决技术矛盾的40 个发明原理。
在40 条发明原理中我们选取其中的向另一维度过度的原则。其内容为:如果物体做线性运动(或者分布)有困难,则使物体在二维度平面上移动。相应的,在一个平面上的移动(或者分布)可以过度到三维空间。因此我们设想将发射小平台的运动不仅限于在导轨限定的方向做水平运动,也可以增加一个自由度,通过在第三个自由度方向的运动,避开与回收平台的相互撞击。
3 UAV-CERD 系统矛盾解决
对装置中出现的两个技术矛盾我们找到如下物理的解决方案。
3.1 技术矛盾1 的解决方案
在本装置中动力是由主电机供给,主电机输出轴上的齿轮通过带动带轮,进而带动带运动。所以发射回收系统中的动力系统主要由带传递动力。而发射系统与回收系统运动主要靠滑块在滑轨上的滑动。而滑块连接着发射系统的底盘和回收系统的底盘。导轨简图,如图6 所示。

图6 导轨简图Fig.6 Slideway Sketch
所以设计连接装置就转化为设计一种可以将发射底盘和回收底盘连接在传送带上的装置。为此我们在发射底盘上设计了一个挂钩,在回收底盘上增加了一个T 型连接头,在传送带上固定了一个类似凹槽的结构,如图7、图8 所示。回收平台由T 型接头控制连接与断开,其与传送带连接部件上的凹槽相配合。通过舵机带动T 型接头绕轴旋转来完成与凹槽的扣合与分离。发射平台由挂钩控制连接与断开。发射平台向后移动挂钩勾住传送带连接装置上的横杆,当发射平台上的挂钩后的撞击端与回收平台的下部的凸出块碰撞,相当于给挂钩施加一个水平方向的力F,如图8 所示。使挂钩绕轴A 点旋转,从而脱离传送带连接装置上的横杆。

图7 T 型接头简图Fig.7 T Joint Sketch Map
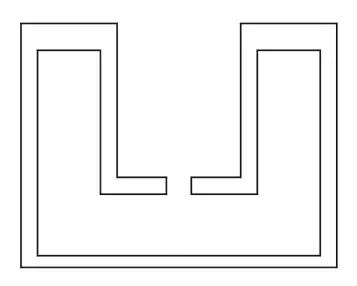
图8 凹槽结构简图Fig.8 Grooves Structure Diagram

图9 钩子结构简图Fig.9 Hook Diagram

图10 凹槽斜视图Fig.10 The Oblique View of the Grooves
3.2 技术矛盾2 的解决方案
根据TRIZ 理论,我们想到可以增加发射小平台运动的自由度,通过向另外一个方向的运动来躲避回收平台运动时可能带来的撞击。
于是我们设计出以下两个方案:
(1)增加一个旋转自由度,使发射小平台旋转出轨道,进行避让。结构,如图11 所示。

图11 发射小平台旋转出轨道图Fig.11 The Spin Out of a Small Platform
(2)增加一个自由度,如图12 所示。L 型顶起片在舵机的作用下绕轴A 点旋转,顶起发射小平台,使发射小平台绕B 点旋转到指定位置。通过控制L 顶起片的旋转角度可以控制发射小平台的旋转角度,从而控制了发射小平台在竖直方向的高度,从而避免了与回收平台碰撞。
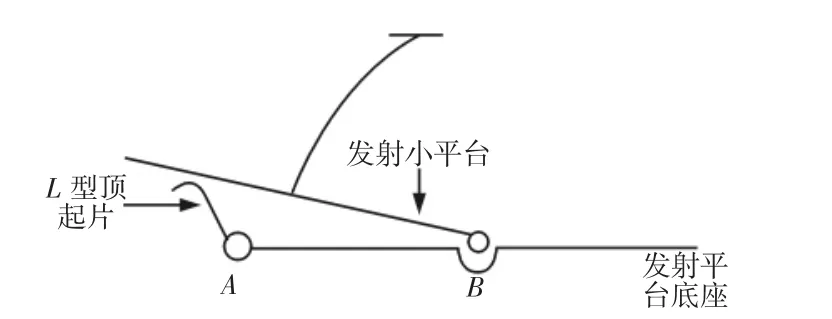
图12 发射小平台被顶起结构简图Fig.12 The Structure Diagram of the Launching Small Platform
方案1 中的转向机构需要设计提供转向的动力机构,而且要求发射小平台底座有较高的强度。相比方案2,其设计复杂且质量较大。方案2 通过舵机控制,设计简便,易于实现。综合整个装置的稳定性、可行性我们最终选择方案2 来实行。
4 实验验证
根据以上设计分析,经过实验与制作,我们建立的具有存储和补给功能的无人机发射回收装置,如图13 所示。装置分为发射架与存储机库两部分。发射架负责固定翼无人机的集群发射与回收,机库负责将返航的无人机进行存储和补给。

图13 装置整体实物图Fig.13 Overall Physical Map of the Device
针对发射过程中的矛盾,根据所选择的解决方案,如图14~图16 所示。

图14 钩子实物图Fig.14 Figure of the Hook

图15 T 型块实物图Fig.15 T Block Diagram

图16 凹槽实物图Fig.16 Grooves
通过钩子和T 型块与凹槽的连接与分离来控制主电机动能供给于发射平台或是回收平台。根据此装置,我们进行了发射和回收固定翼无人机的实验,各部件可行,整个装置联动可行。
5 结论
通过对TRIZ 理论的应用,解决了无人机集群发射回收存储一体化装置设计过程中出现的矛盾冲突。
通过运用分离原理解决了装置运行时空间限制的矛盾,将存储部分从发射回收部分独立出去,方便无人机的存储补给。通过运用物-场分析的方法,对发射回收系统动力供给的技术矛盾进行分析,设计出能够随时脱离或连接动力装置的机构,使发射回收系统按照预期设想能够共用一个动力系统。通过发明原理的应用,解决了发射系统与回收系统运动时的干涉现象,增加装置运行时的安全性。
经过实物制作,试验结果表明,我们的设计可靠可行,为相关领域的研究提供了参考。
猜你喜欢
数学杂志(2022年4期)2022-09-27
中老年保健(2021年2期)2021-08-22
作文评点报·低幼版(2020年30期)2020-07-23
童话世界(2020年13期)2020-06-15
军事运筹与系统工程(2019年4期)2019-09-11
制造技术与机床(2018年10期)2018-10-13
电子制作(2018年11期)2018-08-04
中国铸造装备与技术(2017年3期)2017-06-21
中国交通信息化(2017年3期)2017-06-08
知识就是力量(2017年2期)2017-01-21
