
气动载荷激扰下高速列车横向平稳性模糊控制
2020-12-25 12:30王东威陈春俊熊仕勇
机械设计与制造 2020年12期
王东威,陈春俊,熊仕勇
(西南交通大学机械工程学院,四川 成都 610031)
1 引言
近年来,我国高速铁路发展迅速,中国标准动车组于2016年7 月在郑徐线上成功完成了420km/h 的高速重联和交会试验。然而,当列车处于明线高速交会或大风环境行车等工况时,车身会受到由于空气动力学效应而形成强大气动载荷的作用,使车体振动增加而严重影响了列车运行的平稳性[1-3]。
高速列车悬挂系统是为了减缓和衰减列车在运行过程中由于轨道几何不平顺、牵引力和制动力等引起的振动,悬挂装置的性能是确保车辆平稳运行的关键因素[4]。国内外已有大量学者采用主动或半主动控制的方法,有效的缓解了轨道几何不平顺引起的车辆横向振动[5-7]。而气动载荷作用下的车体振动为瞬态冲击振动,且引起车体振动的机理与轨道几何不平顺引起振动的机理存在较大差异。针对气动载荷激扰下列车横向振动控制的研究,文献[8]采用虚拟惯性阻尼的半主动控制方法,从一定程度上减小了气动载荷激励下的列车横向振动加速度幅值,但半主动控制方案的执行器为阻尼器,控制效果容易受到阻尼器频率响应的限制。
基于以上原因,首先建立了车辆系统动力学模型,使用离线耦合仿真计算方法,研究了在明线交会工况下的车体横向振动特性和运行平稳性。针对气动载荷激扰下车辆平稳性恶化的问题,提出了基于模糊自适应PID 的列车横向主动悬挂控制方案,并详细阐述了控制算法的设计过程和主动控制的数值模拟。结果表明,模糊自适应PID 主动控制可以改善气动载荷激扰下车辆运行的平稳性,提升乘车的舒适性。
2 车辆系统模型的建立
车辆是一个复杂的多体动力学系统,传统靠轮轨接触的车辆系统一般由轮对、构架、车体和悬挂等部分组成,车辆悬挂系统连接着轮对、构架和车体,与此同时,它形成了一种弹性约束,缓和车辆运行期间的振动[9]。设列车系统的位移向量为

轨道几何不平顺和气动载荷同时作用下车辆系统的动力学方程的统一表达式[10],如式(2)所示。

式中:Mv、Cv、Kv—车辆系统的质量矩阵、阻尼矩阵和刚度矩阵;Fev、Fav—轨道几何不平顺和气动载荷的等效作用力矩阵。
这里研究的是气动载荷作用下单节列车的动力响应、横向平稳性特性与平稳性控制问题,根据文献[11]中所给出的车辆系统的动力学详细方程,使用文献[8]中某型高速动车组的参数,建立了单节列车的MATLAB/Simulink 仿真模型。
3 气动载荷作用下车辆平稳性
3.1 动力学离线仿真计算方法
气动载荷作用下车辆动力学响应问题属于高速列车的流固耦合问题,解决此类问题可以使用离线仿真计算或在线耦合计算[12]。离线仿真计算规模相对较小,计算速度快并且计算效率较高,故选用离线仿真计算方法。在CFD 软件中建立列车空气动力学模型并计算出300km/h 下明线等速交会的气动作用力(力矩)。然后,将获得的气动作用力(力矩)加载到第1 节中的车辆系统动力学仿真模型,并计算气动载荷激励下车辆的动力学响应,分析车辆运行的横向平稳性。当两列车以300km/h 明线等速交会时,作用在被测列车上的气动力和力矩计算结果,如图1 所示。
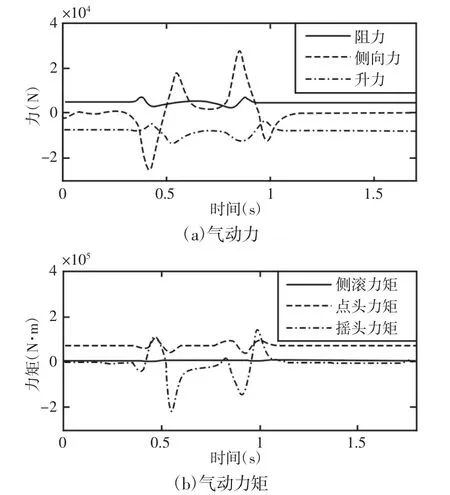
图1 明线交会气动载荷Fig.1 Aerodynamic Load of Trains Meeting in Open Air
3.2 横向平稳性分析
为了研究明线交会气动载荷对列车横向平稳性的影响,对仅在轨道几何不平顺激扰下和气动载荷及不平顺同时激扰下车辆动力学模型进行了仿真计算,其中选用德国低干扰谱作为列车的轨道几何不平顺激励[2,8],气动载荷激励选用3.1 小节中计算出的气动力(力矩)。根据GB5599—1985 中规定的舒适性评价标准[13],采集位于转向架心盘上横向1m 处车体地板上的加速度,得到了只在轨道不平顺激励下和两者同时激励下的车体横向加速度,加速度时域分布及功率谱密度对比,如图2、图3 所示。由图2 分析可知,在明线交会气动载荷和不平顺同时作用下,相比于只在轨道不平顺作用时,车体横向振动加速度幅值显著增大。由图3 分析可知,气动载荷作用使得加速度功率谱密度增大,且由气动载荷引起的车体振动加速度主要分布在(4~11)Hz 频带。为了分析明线交会气动载荷激励下的平稳性,使用了车体振动加速度和Sperling 指标[13]进行评估。车辆运行平稳性对比,如表1 所示。

图2 加速度时域分布Fig.2 Acceleration in Time Domain

图3 加速度功率谱密度Fig.3 Power Spectral Density of Acceleration

表1 横向平稳性对比Tab.1 Comparison of Lateral Stability
由表1 分析可知,相比于仅在轨道几何不平顺作用下,车辆在会车气动载荷和轨道几何不平顺同时作用时,平稳性中Sperling 指标增大7.58%,车体横向加速度的均方根(RMS)增大35.70%,横向加速度峰值增大208.22%。我国客车横向平稳性标准为0.10g,会车时刻的车体横向加速度远远超过了这个标准。
4 模糊主动控制
4.1 主动控制系统模型
车辆平稳性主动悬挂控制系统由控制器、作动器、车辆主动悬挂系统模型、传感器和测试系统等部分组成[11],车辆横向平稳性主动控制系统的原理图,如图4 所示。根据此控制系统基本组成和原理,便可搭建出控制系统的仿真模型。

图4 车辆横向平稳性主动控制系统Fig.4 Active Control System of Train in Lateral Stability
4.2 控制算法设计
在实际运行过程中,车体受气动载荷激励的影响,车辆系统的特征参数或状态易发生改变。经典的PID 控制算法由于无法根据实际情况,自适应的调整参数,使得在会车气动载荷作用时的控制系统品质欠佳[14]。然而,在模糊控制自适应PID 控制算法中,PID 调节器的参数可以通过模糊控制器实时的修正,这样就可以满足不同运行条件下对车辆主动控制器参数的要求,同时保证运行过程中的良好控制质量。该控制器的基本原理,如图5 所示。

图5 模糊自适应PID 控制器结构Fig.5 Controller Structure of Fuzzy Adaptive PID
使用的是MIMO 结构的模糊控制器,控制器的输入参数为车体测点处的加速度误差e 和误差变化率ec,控制器输出参数为PID 调节器的参数kp、ki、kd。
选取误差e 和变化率ec 及kp、ki、kd的模糊集均为{NB,NM,NS,ZO,PS,PM,PB}。将e 和ec 的变化分为7 个等级:{-3,-2,-1,0,1,2,3},将kp、ki、kd变 化 分 为9 个 等 级:{-4,-3,-2,-1,0,1,2,3,4}。模糊控制器的输入参数误差和误差变化率均选用高斯型隶属度函数,输出的三个参数均选用三角形隶属度函数。
在车辆平稳性的实际控制过程中,不同运行工况下对于kp、ki、kd参数需求有一定差异,对PID 参数的要求[15],如表2 所示。表2 详细阐述了e 和ec 在不同的情况下,控制系统的变化趋势、控制作用分析和PID 参数的选取范围。例如在工况1 下,e 和ec 的符号相同,说明误差在向变大的方向发展,而且此时中等大小,说明系统正处于跟随阶段,因此选用了表2 中的kp、ki、kd参数值,以减小系统超调,保证响应速度。

表2 PID 参数的要求Tab.2 Requirements for PID Parameters
根据表2 中车辆平稳性在实际调控过程中对于PID 调节器性能及参数的要求,制定出PID 调节器三个参数的模糊控制规则,如表3~表5 所示。
为了得出模糊控制器最终的输出参数,选用Mamdani 法进行模糊推理,可得:

式中:K—系统输出参数;“◦”—模糊运算;R—模糊关系。

表3 kp 模糊控制规则Tab.3 Regulations of kp Coefficient

表4 ki 模糊控制规则Tab.4 Regulations of ki Coefficient
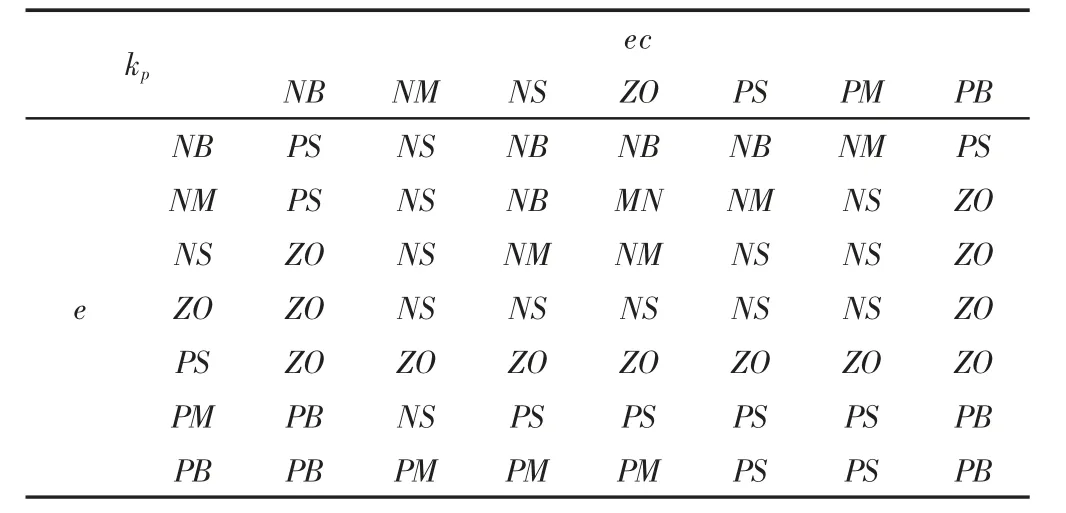
表5 kd 模糊控制规则Tab.5 Regulations of kd Coefficient
上一步推理出的结果仍然为模糊值,无法直接应用于执行器,因此使用了面积重心法将模糊值转换成精确值,即:

式中:vo—控制量的精确值;μ—隶属度函数。
4.3 仿真结果分析
根据第1 节建立的车辆系统动力学模型,运用前文中设计的车辆平稳性主动控制系统的模型和控制算法,在MATLAB/Simulink 中实现了气动载荷激扰下的车辆平稳性主动控制的仿真。车体加速度测点布置位置与前文中测点位置相同。
从车体横向加速度的时域特性、加速度功率谱密度和运行平稳性三个方面,分析模糊自适应PID 主动控制对列车平稳性的控制效果,并与被动控制进行对比分析。
在会车气动载荷的作用下,被动控制和模糊自适应PID 控制的车体横向加速度的时域分布,如图6 所示。加速度的功率谱密度,如图7 所示。

图6 加速度时域图Fig.6 Acceleration in Time Domain

图7 加速度功率谱密度Fig.7 Power Spectral Density of Acceleration
为了比较模糊自适应PID 控制和被动控制对于气动载荷作用下车辆平稳性的控制效果,使用了车体振动加速度和Sperling[13]指标进行评估。平稳性评估的结果对比,如表6 所示。

表6 列车运行平稳性对比Tab.6 Comparison of Stability
由图6 分析可知,被动控制无法有效的衰减会车气动载荷引起的车体横向冲击;模糊自适应PID 控制相比于被动控制,使得在会车时刻车体横向加速度的幅值明显减小。由图7 分析可知,模糊自适应PID 主动控制有效的衰减了气动载荷所引起在(4~11)Hz 频带内的车体振动成分。
表6 表明,相比于被动控制,模糊自适应PID 控制使Sperling 指标改善12.82%,车体横向振动加速度RMS 减小37.02%,加速度峰值减小29.44%。
5 结论
(1)在会车气动载荷的作用下,车辆在运行过程中的横向振动幅值超过了我国客车车体横向振动的平稳性标准0.10g,车辆平稳性急剧恶化。会车气动载荷所引起的车体横向振动加速度频率主要分布在(4~11)Hz 频带内,属于低频信号。
(2)传统的被动控制无法有效的缓和会车气动载荷所引起的车体横向瞬态冲击,模糊自适应PID 主动控制相比于被动控制可以有效的改善气动载荷激励下车辆运行的平稳性。
猜你喜欢
数学物理学报(2021年3期)2021-07-19
装备制造技术(2020年2期)2020-12-14
科技与创新(2020年19期)2020-10-09
铁道运营技术(2020年2期)2020-04-08
今日农业(2019年12期)2019-08-15
专用汽车(2016年12期)2016-02-11
湘潭大学学报(哲学社会科学版)(2015年5期)2015-11-25
山东工业技术(2014年20期)2014-10-21
铁道机车车辆(2012年4期)2012-11-27
计算机辅助工程(2012年5期)2012-11-21
