基于PSO-BP-PID污水pH控制研究
2020-12-19 03:52王宁洲
能源环境保护 2020年6期
王宁洲
(海天塑机集团有限公司,浙江 宁波 315800)
0 引言
本文通过对污水pH值控制过程的研究,采用模糊自适应PID控制和PSO-BP优化的PID控制器分别对其控制。将几种控制算法分别在MATLAB/simulink下进行编程设计及仿真,通过实验结果可看出PSO-BP优化的PID控制器更适合于污水pH值控制。
1 工艺流程
废水在进入污水处理系统后,需通过酸或碱的投加来调节pH值,以达到最佳反应环境。由于车间废水排放时间段、频次、流量及废水中的污染物浓度不一定,同时废水在集水池的停留时间也较短,因此混合反应池中废水的pH无法固定在某个数值,或者固定在某个较小的范围内变动[1-5,12-14]。
2 污水pH值控制系统建模
实际生产中,废水的pH值变化十分复杂,研究人员根据物质守恒和化学平衡定律,提出了连续搅拌反应池中pH动态模型,图1是常见的酸碱中和控制模型,本章中将根据此模型进行建模[6-11,15]。
3 控制算法仿真比较
3.1 模糊自适应PID仿真比较
本文选用MATLAB编程实现仿真,PID初始值预先设定kp0=5.0,kd0=5.0,ki0=0.5,经过使用模糊控制不断地对PID参数在线调整,最后得到仿真图2的污水pH值中和反应曲线。从运行图可得出常规PID算法超调很大,另外模糊控制虽没有超调,但是长时处于稳态,难到达设定值,如图3是将图2局部放大以后,可明显看到模糊自适应很早达到设定值,而PID还在振荡接近,模糊控制只能慢慢靠近设定值。
在实际工业应用中,往往会有许多的干扰因素存在,如图4、图5,可以更明显的看到三种控制算法应对扰动时的各自控制响应,模糊控制超调最大,PID相对超调虽小但到稳态时间没有模糊自适应快,综合看模糊自适应是最佳控制方案。
3.2 三种控制算法仿真结果比较
从图5仿真对比图中,可以得到模糊自适应PID控制的以下特征:
(1)模糊自适应PID能实时调节PID参数,对一般的时变、非线性系统控制效果较为理想。
(2)与常规PID比较,模糊自适应PID结合了现场现场操作人员的经验和专家知识,继而有更好的鲁棒性。
(3)运行调试结论显示模糊自适应PID稳态和超调优于常规PID。
虽然在上述仿真图中模糊自适应PID控制效果已然满足了试验的控制要求,但是当被控对象非线性、时滞性较为严重时,模糊PID控制效果可能就无法达到要求。
3.3 PSO-BP优化的PID控制污水pH模型仿真
图6、图7是PSO-BP算法与其他几种算法的仿真对比图,可以得出PSO-BP算法控制效果更为理想。试验将图6中扰动部分进行放大后得到图8,可以看出PSO-BP算法的扰动超调更小,控制相对更加平稳,性能更好。从各种控制算法的仿真图综合对比分析,PSO-BP算法更加适合于污水pH值控制。
4 试验效果对比
改造前废水的pH值波动较大,虽满足国家要求的排放标准,但并不能完全满足某公司的环保标准,如表1是对改造前、基于组态王模糊自适应PID控制及基于组态王PSO-BP-PID控制分别在污水排放口对pH值进行连续采样11次污水处理控制运行数据,每次采样时间间隔为3 min。
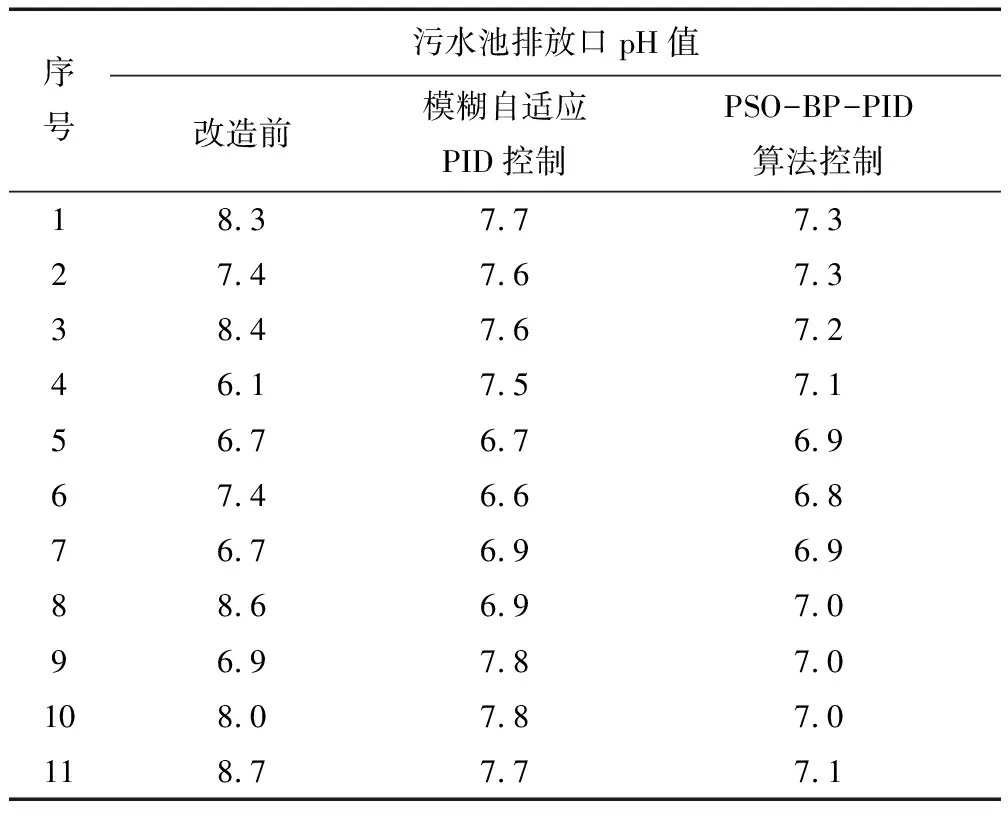
表1 pH值监测数据
从表1中改造前数据可看出,排放口的pH值基本在6~9之间,虽然符合排放要求,但波动范围较大,最小的为6.1,最大的为8.7,控制效果并不理想,有时也会出现不达标的控制情况。
模糊自适应PID控制与PSO-BP-PID控制对污水pH值控制在质量上都有一定量提升,但从表1中可看出PSO-BP-PID的污水排放口pH值波动明显更小一些,对于污水pH值中和反应控制的质量更佳,符合某公司前期制定的污水排放pH值要求。
5 总结及展望
pH是检验处理后的污水是否达到规定排放标准的一项重要控制指标,但是在水处理中pH的获取有滞后现象,所以在业内是公认的最难控制对象之一。如能对污水pH值自控系统加以改进可提高废水排放的达标率,一来能降低企业在环保项目运营中的风险,二来能给企业增添更多地经济效益,并做到绿色可持续发展。
本系统测试时虽无不合格反馈,但还是发现偶尔水质pH值不在6.5~7.5之间,虽满足排放标准,但控制算法还是有待完善。
猜你喜欢
应用能源技术(2022年9期)2022-10-22
汽车实用技术(2022年15期)2022-08-19
全面腐蚀控制(2022年1期)2022-01-26
湖北农机化(2021年7期)2021-12-07
湖北工业大学学报(2021年2期)2021-04-28
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
汽车文摘(2018年2期)2018-11-27
汽车文摘(2018年7期)2018-07-04
汽车文摘(2016年11期)2016-12-08