基于安卓智能手机的BDS/GPS单点定位性能评估与分析
2020-12-18 07:44赵俊兰刘明明
北方工业大学学报 2020年5期
赵俊兰 刘明明
(北方工业大学土木工程学院,100144,北京市)
全球卫星导航系统(Global Navigation Satellite System,简称GNSS) 是目前获取时间与位置信息的重要手段,因其全球性、全天候、高精度的特点与能力, 已经广泛应用于导航定位、大地测量、地球动力学、地球物理、变形监测等领域[1];目前全球卫星导航系统主要包括:美国全球导航系统(GPS)、欧洲伽利略系统(GALILEO)、俄罗斯格洛纳斯系统(GLONASS)以及我国自主研发的北斗全球导航卫星系统(BDS). 安卓操作系统诞生于2007年,根据相关统计数据显示,在2018年生产了3.9亿部智能手机,其中选用安卓系统的智能手机占比达到了89.3%. 可以看出,安卓系统的手机或其他智能终端越来越受到人们的欢迎,基于安卓智能手机的定位服务应用也已经成为人们生活中的常用品,包括智能出行、智能交通、智能管理、智能医疗等众多方面.[2-3]然而,目前智能手机定位应用较多、研究较少,且定位精度都不高、随着人们需求不断提高,自2018年底开始,我国北斗系统成功全球组网,代表着BDS已经开始提供全球服务,高精度定位服务应用有着非常广阔的发展空间.
卫星导航定位的方法主要包括差分定位和非差定位2类,相应的代表技术是RTK和PPP技术.[4]差分定位技术是利用观测值形成差分,对观测值进行改正,可以消除卫星钟差等误差的影响,有效地提高定位精度. 但差分技术的定位精度会受到基线长度的限制,距离变大,基线随之增长,卫星轨道误差、电离层延迟等因素的影响增大,会导致精度降低.[5]PPP技术则是使用GNSS接收机等获取载波相位观测值和伪距观测值,再利用IGS提供的精密星历和精密钟差进行坐标解算,从而得到精度较高的测站坐标.
目前国内外也有许多学者对智能手机的定位性能进行了深入分析. 微软公司开发了适用于Nokia Lumia 1520手机的外置部件,使手机能够接收GNSS观测值,然而,这种设备接收的观测数据质量较差,最终只能够达到米级的定位精度[6];冯昆等基于低功耗蓝牙和行人航位推算技术,利用扩展卡尔曼滤波进行融合处理的室内定位方法,得到手机的平均定位精度为1.17 m,90%的概率定位精度达到2 m[7];张楷时等采集静态的GNSS原始观测数据,利用PPP定位解算,手机的定位精度也可达到分米级[8];张慧敏等将手机接收到的原始数据进行差分改正,也得到了亚米级的定位精度.[9]本文通过安卓智能手机移动端和专业接收机接收的GNSS观测数据,利用事后精密星历、钟差等产品解算在不同定位环境下的定位结果,将专业接收机的解算结果作为参考真值,开展基于智能手机的BDS/GPS组合高精度定位性能评估研究,以期推动智能手机实现高精度定位.
1.PPP技术的基本理论与方法
精密单点定位是指采用高精度的精密星历和钟差产品,对使用一台GNSS接收机采集的载波相位和伪距观测值,通过模型改正或参数估计的手段,将与卫星端、信号传播路径及接收机端相关的误差进行消除或削弱,从而实现高精度定位的一种方法.[10]
1.1 伪距和载波相位观测值
通过GNSS接收机获取到的最基本的2个观测值是伪距观测值和载波相位观测值. 卫星发出的测距码信号在传播过程中要穿过电离层和对流层,传播速度和路径会发生变化;同时,由于钟差的存在,导致信号到达接收机的传播时间与光速的乘积得到距离与卫星至接收机的几何距离会有一定的偏差,故该乘积被称为伪距.[11]载波相位观测值是指卫星产生的载波信号传播到接收机时产生的相位变化量.
1.2 定位误差改正
卫星导航定位中出现的误差按照其来源可大致分为3种类型:与观测卫星相关的、与信号传播路径相关的以及与接收机相关的. 下面重点对精密单点定位中的卫星轨道和钟差、电离层和对流层以及其他误差的修正方法进行说明.
1)卫星轨道和钟差误差.
利用卫星星历计算的卫星轨道与实际轨道见得差值叫做卫星轨道误差.[12]广播星历的精度通常不高,目前GPS广播星历的误差约为1.6 m,为精密单点定位研究,必须使用精密星历,IGS提供的事后精密星历可达到2 cm,使用更高精度的星历,越能削弱卫星轨道误差的影响.
由于卫星运行的空间环境变差,原子钟寿命老化等影响,卫星钟会发生频漂、频偏等现象,导致导航卫星的时间与系统的时间产生差异,称其为卫星钟差. 1 ms以内的卫星钟差产生约300 km误差. 目前,广播星历提供的卫星钟差的改正精度在5 ns左右,等效距离误差为1.5 m,但也还是不能满足精密单点定位的需求;但是IGS可以提供实时用户精度优于0.3 ns的5秒采样间隔的精密卫星钟差产品,数据延迟约为 25 s,使得卫星钟差误差的影响可以得到较大程度的削弱.
2)电离层延迟与对流层延迟误差.
电离层由密度相等的电子和离子组成,其高度离地面约为60~1 000 km. 电离层延迟误差是指传播信号穿过电离层时,传播路径与传播速度都发生改变所造成的偏差. 通常使用Klobuchar模型、球谐函数模型和格网模型等来减弱电离层的影响. 对流层是指离地表面高度50 km以下的中性大气层. 对流层环境复杂,传播信号穿过时会发生折射,使测量距离与理论距离产生偏差,造成对流层延迟误差. 精密单点定位技术通常使用Saastamoinen模型对对流层延迟误差进行改正. 由于上述2个误差的模型公式过于复杂,具体计算方法可参考前述文献.
3)其他模型化误差.
其他误差模型如相对论效应、卫星天线相位中心、固体潮及地球自转改正等误差模型比较成熟稳定. 具体计算可以参考文献[11-12].
2 实验结果与分析
2.1.GNSS数据获取
实验数据采集的地理位置为北京中关村森林公园,仪器设备使用瑞典NovAtel公司生产的ProPak6 GNSS(pp6)专业接收机和Android 9.0操作系统的智能手机华为Mate20 Pro. 动态测试数据采集时间为2018年12月7日8:18—9:50;静态测试数据采集时间为2018年12月7日3:18—2018年12月7日6:24,历元间隔都为1 s. 数据处理过程中所需要的卫星计时系统2018年第341天的卫星广播星历、卫星轨道和钟差文件及电离层文件等通过iGMAS网站查询下载.
2.2 定位结果与分析
本文数据处理采用由日本东京海洋大学开发的标准精密定位开源程序包RTKLIB进行处理[12],主要使用到软件的RTKPOST与RTKPLOT 2个模块. 解算过程中定位模式选择精密单点定位,设置15度高度截止角,采用IGS最终产品对电离层进行改正,对流层改正采用Saastamoinen模型,卫星轨道与钟差采用精密星历,卫星系统根据解算过程中的需求进行设置. 本实验采取专业接收机与手机并址(间隔3 cm,造成的误差可不计)同时接收数据,以专业接收机的定位结果作为参考真值,将手机移动端分别动态及静态测试下的定位结果对比参考真值,得出智能手机移动端的定位精度情况.
1)动态测试.
对动态观测值分别在单GPS系统及GPS与北斗组合系统下使用RTKLIB软件按上述参数设置进行解算分析,得出在E、N、U 3个方向上的收敛曲线(偏差),如图1~2所示.
分别计算动态测试数据在E、N和U 3个方向的偏差,得到RMS(均方根)值如表1所示.
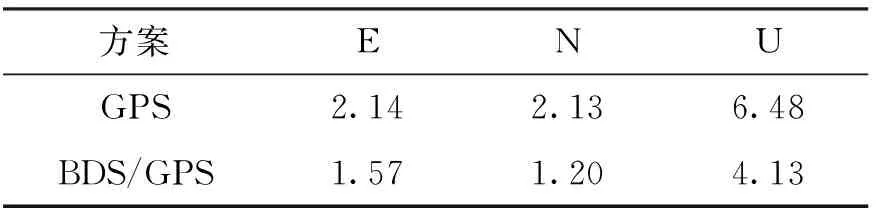
表1 2种系统模式下动态RMS值 m
由图1~2和表1中可以看出,智能手机的动态精密单点定位精度在水平方向为1~2 m. 基于在单GPS系统和组合系统情况下,手机在E、N和U方向的RMS值分别为2.14 m、2.13 m、6.48 m、1.57 m、1.20 m、4.13 m,分别提高了27%、44%和36%. 组合系统的定位精度高于单GPS系统,主要原因在于组合系统中BDS系统的加入增加了多余观测值.
2)静态测试.
对动态观测值分别在单GPS系统及GPS与北斗组合系统下使用RTKLIB软件按上述参数设置进行解算分析,得出在E、N、U 3个方向上的收敛曲线(偏差),如图3~4所示.
分别计算动态测试数据在E、N和U 3个方向的偏差,得到RMS(均方根)值如表2所示.
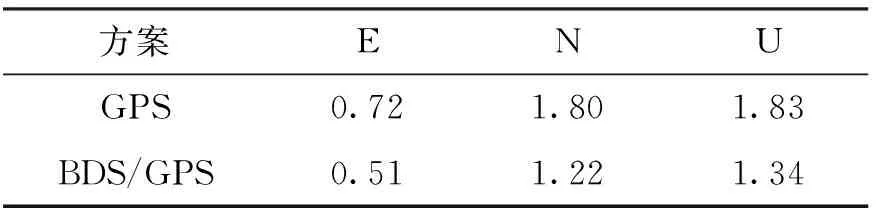
表2 2种系统模式下静态RMS值 m
由图3至图4和表2中可以看出,智能手机的静态精密单点定位的水平精度和空间精度为0~2 m. 基于在单GPS系统和组合系统情况下,手机在E、N、U方向的RMS值分别为0.72 m、1.80 m、1.83 m、0.51 m、1.22 m、1.34 m,分别提高了29%、32%和27%. 组合系统的定位精度都高于单GPS系统,原因同上. 由于GPS卫星的轨道精度较高,E方向的变化最低.
3 结语
本文研究了普通安卓智能手机的卫星导航定位精度,并通过在不同测试环境和不同导航系统之间的对比进行实验,利用RTKLIB开源程序包解算,对智能手机终端的定位精度进行了评估和分析. 结果表明,组合系统的定位精度高于单GPS系统,静态测试与动态测试的定位精度基本相当,但是,总体精度都在0~2 m范围内. 同时本文验证了安卓手机移动端的稳定性与可靠性满足一般的使用要求,这说明安卓智能手机具备提供低成本位置服务的基本条件.
需要说明的是,本试验过程中实验数据采用的是事后处理,后续将重点针对实时数据进行定位性能的评估和分析.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年4期)2022-08-15
军民两用技术与产品(2022年7期)2022-08-06
导航定位学报(2022年1期)2022-02-17
导航定位学报(2021年4期)2021-08-29
导航定位与授时(2020年5期)2020-09-23
中国电气工程学报(2019年18期)2019-10-21
智富时代(2019年4期)2019-06-01