光电跟踪系统中精密控制技术研究进展
2020-12-17 02:23:42马佳光陈洪斌付承毓杨文淑张孟伟包启亮黄永梅
光电工程 2020年10期
唐 涛,马佳光,陈洪斌,付承毓,杨 虎*,任 戈, 杨文淑,亓 波,3*,曹 雷,张孟伟,包启亮, 谭 毅,黄永梅,3,毛 耀,王 强
1 引 言
光电跟踪系统可以看作是以各种机械结构和光电传感器构成的能满足重要任务需要的设备,包含有:探测目标辐射能量的图像传感器成套装置,跟踪目标轨迹的定位装置以及控制定位装置的方法[1-3]。因此,闭环精度(跟踪精度、视轴稳定精度)是光电跟踪系统重要技术指标之一,精密控制技术是实现高精度跟踪性能的保证,始终是光电跟踪系统最为核心技术[4-7]。高精度控制技术是传动系统、传感器、控制算法以及光机架构的综合体[9-10]。从本质上看,控制算法的作用是将控制性能逼近传感器以及驱动水平的极限。由此可知,光电跟踪控制系统的发展首先离不开传动系统的进步。从1918年到20世纪70年代初,最早的光电跟踪系统因为当时生产水平限制,大都是采用蜗轮蜗杆以及齿轮驱动。蜗轮蜗杆传动的优点是在较小的空间内能获得较大的传动比。但是大尺寸蜗轮的精度很难保证,且系统惯量很难匹配。随后,齿轮传动被应用到大型光学望远镜,比如欧洲南方天文台的3.6 m光学口径望远镜(1977)、美国帕洛玛山天文台4.47 m光学口径的MMT地平式望远镜(1979)、国家天文台的2.16 m望远镜(1989)以及4.2 m光学口径的SOAR(2003)望远镜的方位轴[11]。我国早期的160、170光学经纬仪,同样采用齿轮传动控制系统。为了适合速度很低、加速度小的天文目标观测,摩擦传动技术被重新广泛应用在大型天文望远镜上,比如10 m光学口径的KeckⅠ望远镜(1992)和Keck Ⅱ望远镜(1996)[10],6.5 m光学口径的MagellanⅠ望远镜(2000) 和MagellanⅡ望远镜(2001)[12],以及国内的LAMOST望远镜[13-14],国内1.8 m望远镜[15]。摩擦传动控制系统具有低速爬行、刚度差和运动打滑等缺点,只适合运行在极低速以及不需要频繁换向的场合。在需要同时兼顾高速和低速的高精度跟踪的应用场合,采用力矩电机直接驱动方式是最理想的选择,如3.5 m光学口径的Starfire(1994)望远镜[16-17]和3.67 m光学口径的AEOS(1996)望远镜[18],3.9 m光学口径的VISTA望远镜(2007),4.2 m光学口径的DCT(2009)以及SOAR望远镜的俯仰轴也都是采用该驱动方式。国内,中国科学院长春光学精密机械与物理研究所研制的718光电经纬仪,中国科学院光电技术研究所研制的778光电经纬仪同样采用力矩电机驱动[5]。778光电经纬仪是国内第一代数字控制光电跟踪系统,在当时代表国内最高技术水平,同其他光电装置一起获得1985年国家科技技术进步特等奖。更值得一提的是另一种直接驱动方式:由多个圆弧型直线电机拼接而成的直驱电机。欧洲南方天文台的8.2 m光学口径的VLT望远镜[19],西班牙的10.4 m光学口径的GTC望远镜,以及日本国家天文台的8.2 m光学口径的Subaru望远镜[20],均采用这种驱动方式。此外,传感器的发展同样提高了光电跟踪系统性能,尤其是编码器和图像传感器的飞速发展,极大地提高了光电跟踪系统的性能,如29位高精度光电编码器在30 m大型望远镜中的成功应用,改善了速度平稳性,直接提高了测量精度。高采样频率的图像传感器(CCD、CMOS)可以直接扩展闭环系统的跟踪带宽,从而减小图像光轴的扰动以及目标滞后误差,提高了视轴稳定精度。为了进一步减小扰动以及目标滞后误差,解决精度、运动范围以及快速响应、电视视场大小之间的矛盾,复合轴控制系统被应用到光电跟踪系统中。
复合轴控制也被称为双阶控制(dual-stage control)技术,广泛用于硬盘控制、芯片制造、光电跟踪与稳定系统、高精度激光测距、激光通信等高精度伺服控制系统中。复合轴光电跟踪控制系统最早见于1966年Thomas发表的文章[21],它在第一级粗跟踪(coarse tracking)框架的基础上,采用第二级高带宽精机构(fine tracking)进一步减小粗跟踪残差从而实现更高精度的跟踪。复合轴控制系统的本质就是双通道控制系统(two-channel control system),它是由Krasovsky 于1957年提出。此后,Neuman在1960年详细分析了复合轴控制系统的交叉耦合效应,从而使得复合轴控制系统理论基本完善。复合轴光电跟踪系统兼顾了大动态跟踪范围以及极高跟踪精度的特点,将传统的机架光电跟踪系统的精度提高到微弧度级,甚至亚微弧度,并同时具备快速响应的优点。国内从20世纪80年代开始复合轴跟踪技术的研究[4,6-7,22-26],马佳光以及同事先后突破了复合轴光机结构综合设计、高采样高精度图像探测系统、高精度快速反射镜定位控制等一系列基础理论以及工程技术,并成功地研制出多种类型复合轴光电跟踪系统。快速倾斜镜跟踪系统是复合轴跟踪系统的最重要技术之一[25-27],任戈在1990年研制了基于音圈电机的快速倾斜镜。在此基础上,付承毓、叶步霞[6]开展了快速倾斜镜闭环控制技术的研制工作。随后,任戈团队利用Tomizuka提出的零相位跟踪技术(ZEPT)突破了一阶谐振限制,提高了快速倾斜镜的闭环带宽[28]。复合轴光电跟踪系统在国内外有很多成功的案例:如1990研制的复合轴控制系统、LUCE激光通信终端、空间哈勃望远镜、1.8 m太阳望远镜、1.2 m墨子号通信望远镜等。相关应用领域的需求以及新技术的发展,推动了其他一些改进型复合轴光电跟踪系统的出现,从而实现了更高跟踪精度、更宽闭环带宽以及更广的应用范围。在运动平台光电跟踪控制领域,两轴四框架光电跟踪系统、基于信标光稳定的伪星参考系统、基于磁流变平台的跟踪系统等,都是复合轴控制系统的拓展应用。可以说在任何一个需要高精度跟踪与定位领域,复合轴控制系统是不可缺少的技术。复合轴控制系统的进步主要体现在两个方面:
1) 快速响应、高分辨率、高线性执行器的出现;
2) 高精度控制理论以及实现手段的飞跃发展。近年来,国际上相继出现了三阶、四阶等高阶的复合轴跟踪控制系统,极大地提高了跟踪控制性能。相比采用独立传感器分别控制复合轴控制系统,付承毓以及同事研制了单检测型复合轴控制系统(卸载控制)不仅减少传感器的数量[29],并且更进一步提高系统的跟踪精度。在国际首次自由空间星地量子通信实验中,亓波研制了三级复合轴控制系统用于1.2 m墨子通信地面站光电跟踪系统中[30],减小了大气传输中信标光的起伏角,提高了跟踪精度。从另外一个方面,跟踪架结构的变化也极大地改善了光电跟踪系统控制性能。
经典的地平式机架由于力学对称性好,但是对于过天顶的目标(仰角超过85°)由于正割补偿投影使得方位角速度迅速增加,导致目标滞后误差很大,甚至无法跟踪上。为了解决高仰角目标跟踪问题,陈洪斌、曹雷[31-32]研制了偏三轴光电跟踪系统,相比经典的地平式跟踪架,由于不需要正割补偿投影,方位跟踪角速度可以下降10倍。中国科学院上海天文台提出了一种结构对称的正交三轴跟踪系统,可以实现天顶无盲区跟踪[33]。现有的三轴跟踪系统都是两轴工作模式,没有发挥三轴跟踪系统的工作灵活、快速的特点,如何实现三轴联动是一项具有挑战的工作。中国科学院光束控制重点实验室[34]实现了一种基于双方位轴跟踪模式,用来实现三轴系统的解耦控制,提高了对快速目标的跟踪精度。
从20世纪70年代开始,国内开展了运动平台上光电跟踪系统中的研究,采用惯性传感器测量载体扰动实现闭环控制,隔离载体平台的扰动,将视轴稳定在惯性空间[35],从而推动光电跟踪由地基平台向运动平台方向的发展。其次,由于运动载体的高速发展,从而突破了时间、空间的限制,极大地推动了光电跟踪系统的发展。两轴四框架光电跟踪系统是运动平台上最好的一种结构形式[35-39]。通过外框隔离外部扰动,从而为内框提供了一个相对安静的环境。采用该结构形式的光电跟踪系统,在机载、舰载、车载等运动平台可以实现10 μrad以下的跟踪精度。国内中国科学院长春光学精密机械与物理研究所、西安应用光学研究所、洛阳光电设备研究所(613所)等单位在两轴四框架的工程研制上取得了一系列重要成果[36-38]。中国科学院光束控制重点实验室自上世纪九十年代开展了运动平台上复合轴光电跟踪控制系统的研究[40-43],近年来杨虎、包启亮以及同事推进了相关技术的快速发展,研究了基于快速倾斜镜的二级视轴稳定方法[41-42],成功地应用在舰载光电跟踪系统,精度优于10 μrad。光纤陀螺的发展也大大地提高运动平台光电跟踪系统性能。微小型高精度MEMS惯性传感器的出现[43-45],使得超小型光电跟踪系统随之而来,如峰鸟型光电系统。截止目前,空间望远镜被认为是最复杂、最先进同时成本最高的光电跟踪系统,但仍然是一种复合轴控制系统[46-47]。由于空间望远镜在太空中不受大气影响,而且长时间对远距离目标曝光成像,图像分辨率非常高。如何克服航天器平台的微振动影响是空间望远镜需要解决的首要问题,通常采用主、被动减震技术来实现减震是非常必要的,但最终的高性能跟踪仍然离不开极高精度的导星仪器探测视轴的变化,从而控制快速倾斜校正低频的目标晃动。
从以上可以看见:从最早的电影经纬仪器(光电跟踪系统)到现在最先进的哈勃、詹姆士韦伯等空间光电望远镜跟踪系统,为了将跟踪精度提高到瞬时视场的水平(图像的分辨率),扰动抑制以及目标跟踪始终是光电跟踪控制系统面对的技术问题,也是精密控制需要解决的最根本问题[48-52]。从控制方法上看,从最初的经典单环路控制、速度-位置闭环,到现在的基于加速度反馈的多回路控制,线性反馈控制器仍是光电跟踪控制方法的主流[53-55]。尽管前馈控制从理论上看是改善控制系统最直接最有效的手段,但是信号的测量问题以及模型不确定导致前馈控制难以发挥其效果。非线性控制一直是控制领域的热点[56-58],针对光电跟踪系统这种快速响应、实时跟踪的图像伺服系统来看,目前有一些成功的尝试。基于模型的观测器控制方法近年成功应用到光电跟踪控制系统中[59-61],无论是理论和实验都证实该方法有效地改善了光电跟踪控制系统性能。本文概要地回顾了光电跟踪控制系统中精密控制技术的发展历程,并综述了相关的研究热点以及前沿技术方向,同时将重点阐述针对光电跟踪控制系统中的扰动抑制技术以及目标跟踪的先进控制方法,最后指出该领域的发展趋势。
2 扰动抑制技术
扰动抑制是所有运动控制系统面临的首要问题,同样也是光电跟踪系统需要解决的技术难点。扰动始终存在光电跟踪控制系统中,比如电机力矩波动、驱动系统的噪声、传动装置的接触摩擦、平台的振动、光轴的抖动等。复杂的扰动将影响跟踪精度甚至破坏系统稳定性。扰动难于消除主要有三个原因:首先,扰动模型就本身具有不确定性,且难于建立精确的数字模型,从而不能完成补偿;其次,传统的线性控制器由于受到带宽的影响,扰动抑制性能必然受到限制;再者,有很多扰动传感器无法直接获取;最后,由于受到电机力矩、机械结构特性以及传感器响应的限制,有限的控制带宽制约了控制系统性能。根据对光电跟踪系统影响方式的不同,将扰动抑制技术分为以下三个方面:精密驱动技术、惯性稳定技术、振动抑制技术。本小节重点阐述针对这三个方面的控制技术的研究进展以及热点。
2.1 精密驱动技术
精密驱动技术是指采用合适的控制方法消除电机纹波、驱动噪声、机械结构的柔性、摩擦等,从而使闭环性能达到传感器的分辨率水平。简单地说,精密驱动技术就是针对跟踪控制系统内部扰动开展的控制方法。近几年的代表工作主要包含:加速度反馈控制技术、双电机驱动控制技术、基于扰动观测器的控制技术等。光电跟踪控制系统普遍采用了电流反馈、速度反馈、位置反馈的三闭环控制模式。速度环就是为了提高系统的刚度和响应时间,改善系统的线性特性,为位置环提供良好的控制对象。可以在此基础上考虑加速度反馈或者力矩反馈形成的内环,由此构成一个多闭环控制模式。20世纪80年代就有人在机器人关节控制系统提出了这一思想[62-63],改善了闭环控制性能[64-65]。George[66]提出基于负载端加速度传感器测量的反馈控制方法,从理论和仿真证明负载端加速度反馈可以有效的抑制机械谐振,从而提高控制系统带宽。Wu和Han[67-68]同样利用加速度反馈在高速、高精度机器人的轨迹跟踪控制、力接触控制、振动控制等取得了非常好的实验结果。利用线加速度计合成的角加速度,解决了高带宽、高精度角加速度测量问题。加速度反馈最早出现在Andersen研制的3.6 m望远镜控制系统中的报告[69],随后也在大型辅助望远镜中有成功应用的报道[70],中国科学院光束控制重点实验室在 2007年[55]将加速度反馈应用在光电跟踪系统中,在谐振抑制、摩擦力矩补偿、风力矩抑制等方面取得了一系列非常有意义的成果。
1) 直接三闭环控制
基于加速度反馈构成的多闭环控制结构如图1所示。引入加速度环的好处有三点:1) 加速度传感器直接反应力矩的变换,是实现对力矩的测量,又可以检 测到平台相对惯性空间的加速度物理量,能够直接起到惯性稳定的闭环作用;2) 高带宽的加速度环可以为速度环提供良好的被控对象,有利于速度环的设计和速度环抑制能力的提高;3) 三闭环控制结构较双闭环控制具备更强的抗扰能力和鲁棒性能。
基于加速度反馈控制系统的扰动抑制特性如下:
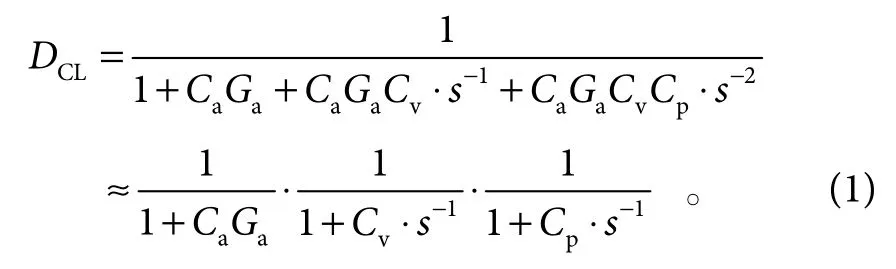
对多闭环系统来说,系统的总扰动抑制性能等于各闭环的扰动抑制特性的乘积,因此对扰动抑制总是随着环路的增加而提高。但是对于目标跟踪来说,多环路可能带来相位滞后,有可能影响目标跟踪精度。
图2是加速度开环响应,相比速度开环响应,它没有受到第一个反谐振的影响。图3展示了速度闭环响应,可以看见加速度反馈很好地克服谐振,并且扩展了闭环带宽。图4展示了加速度反馈在换向正弦轨迹跟踪实验中相比仅有速度闭环跟踪,加速度反馈构成的多闭环系统,将速度跟踪精度提高了4倍,可以较好地抑制摩擦尖峰扰动。
2) 虚拟三闭环控制
从多传感器融合的思路出发,需要减少传感器的使用数量。利用MEMS线加速度计估计平台的角速度信号,替代陀螺传感器,并以此实现系统的三闭环控制,其控制框图如图5[71]。为了消除加速度计在积分过程中产生的累积误差,一般采用低频截止算法或者低频衰减算法滤掉加速度传感器的低频漂移部分,或者融合其他位置传感器修正积分的零点。然而低频截止算法和低频衰减算法难以确定噪声的频率范围,在降低有效信号的可能性方面存在一些问题。为了较好地解决这个问题,利用加速度信号的二次积分得到的平台位移与实际位置测量值之间的差值来修正积分过程的累积误差,实现过程如图6,其中B1代表第一个时间点对应的角度位移传感器测量的实际位置,Ta为 加速度的采样周期,Tp为CCD的采样周期。在第一积分周期中,表示初始的加速度信号,表示一次积分的初始速度,表示二次积分的初始位置。
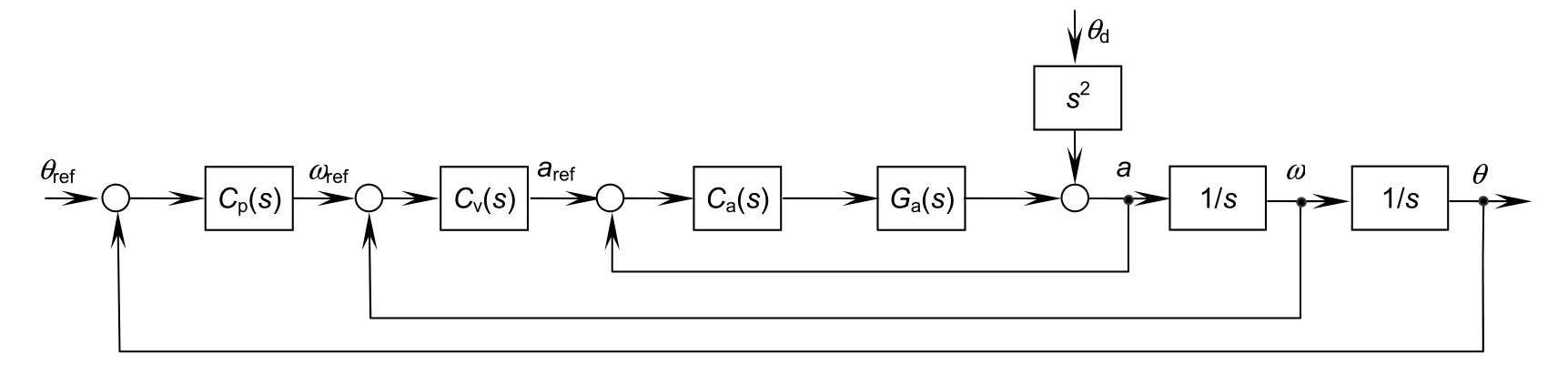
图1 由加速度组成的控制结构 Fig. 1 Control structure based on acceleration feedback
图2 加速度开环响应 Fig. 2 Acceleration open-loop response
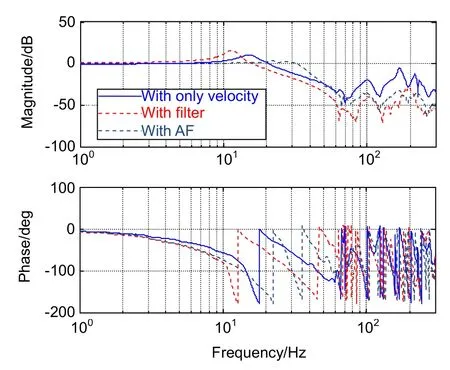
图3 速度闭环响应 Fig. 3 Velocity closed-loop response
3) 加速度扰动观测器
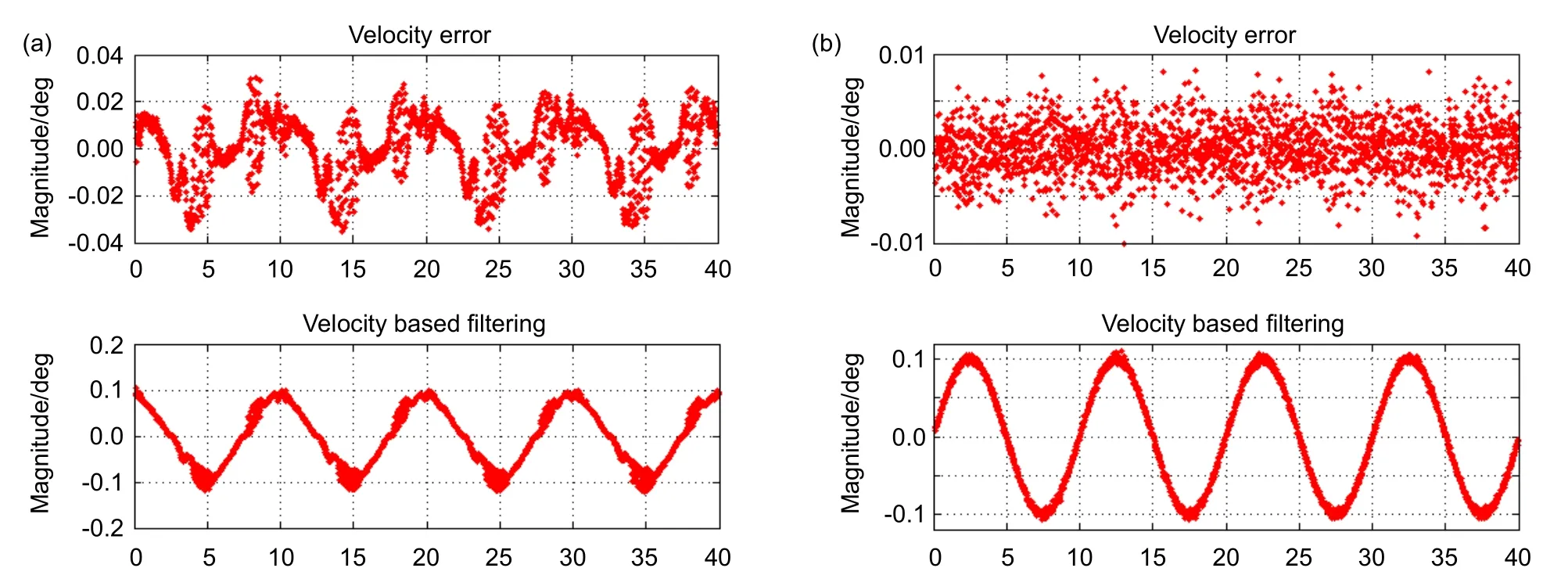
图4 速度跟踪误差曲线=0.1°sin(0.5t)。(a) 无加速度反馈;(b) 有加速度反馈 Fig. 4 Velocity tracking error =0.1°sin(0.5t). (a) Without acceleration feedback; (b) Acceleration feedback
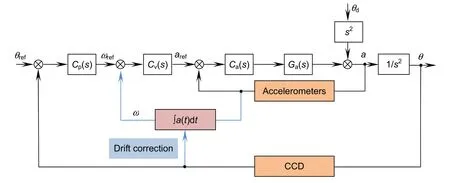
图5 基于虚拟速度环的三闭环控制系统[71] Fig. 5 Triple-loop control system based on a virtual velocity[71]
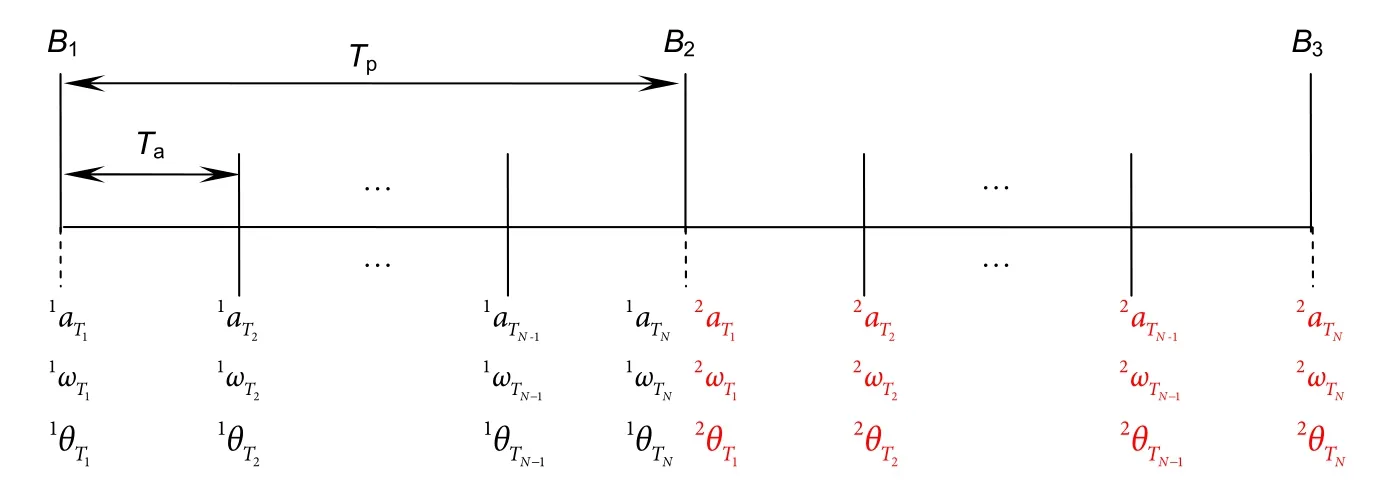
图6 初始速度和初始位置估计原理 Fig. 6 Schematic diagram of estimation of initial velocity and position
扰动能够通过传感器准确测量,最简单抑制扰动方法利用测量的信息实现前馈控制,抵消扰动对控制系统的影响。当然,控制模型的逆必须数字可解析,通常在低频容易实现。然而在很多时候,负载的扰动是难于通过传感器直接测量或者即使能够测量,要么测量成本高,要么难于分离扰动信号,因为传感器中的信号常常混叠其他的噪声。利用控制系统已经存在的信号对扰动进行滤波器估计,并利用估计的扰动信号实现扰动前馈补偿,这就是扰动观测器(disturbance observer, DOB)控制方法的基本思想,由Ohnishi在二十世纪九十年代将其应用在精密跟踪与定位控制系统中[72-74]。由于DOB控制方法是直接观测真实系统的扰动,不论它是线性还是非线性的特征,将所有扰动源视为一个扰动进行前馈补偿。在实际的控制系统中,通常将多闭环回路控制与DOB控制相结合,可以发挥很好的效果。多闭环回路不仅仅可以消除扰动,同时提高了观测模型的线性度,有利于扰动的估计,从而发挥DOB方法的效果。该控制技术在光电跟踪系统也取得了一些有意义的结果,如风力矩补偿、扰动抑制、摩擦补偿等。图7给出了基于加速度的DOB控制结构图[75]。
从频率响应图8可以知道,加速度DOB引入原始的反馈闭环系统中,可以有效地抑制控制系统的扰动。由于加速度带宽很宽,其次加速度DOB能够对中高频扰动抑制具有很好的效果,这个结果非常有意义,因大部分类似方面研究只解决低频扰动抑制的问题。因此,基于加速度测量的DOB是一种对中高频扰动抑制的控制方法,特别适合光电跟踪控制系统。
采用基于加速度反馈和DOB的控制方法,评价了1.2 m墨子号量子通信望远镜系统[76](如图9)存在风力矩干扰时候的跟踪精度。由于方位轴机械结构对称以及转动惯量大,对风力矩的扰动不敏感,从图10中红色线可以看到方位最大跟踪误差在0.2″以内,黑色实线记录了方位轴跟踪10″均方值的最大值小于0.1″。由于镜筒没有封闭以及俯仰轴转动惯量小,风力矩对其干扰较大,图10中蓝色线显示俯仰轴跟踪最大误差为1.1″左右,绿色线是俯仰轴跟踪10″的误差均方值的不超过0.23″。从上面的跟踪结果可以看出,1.2 m复合轴光电跟踪系统具有抗5级风力矩扰动的高精度跟踪能力。
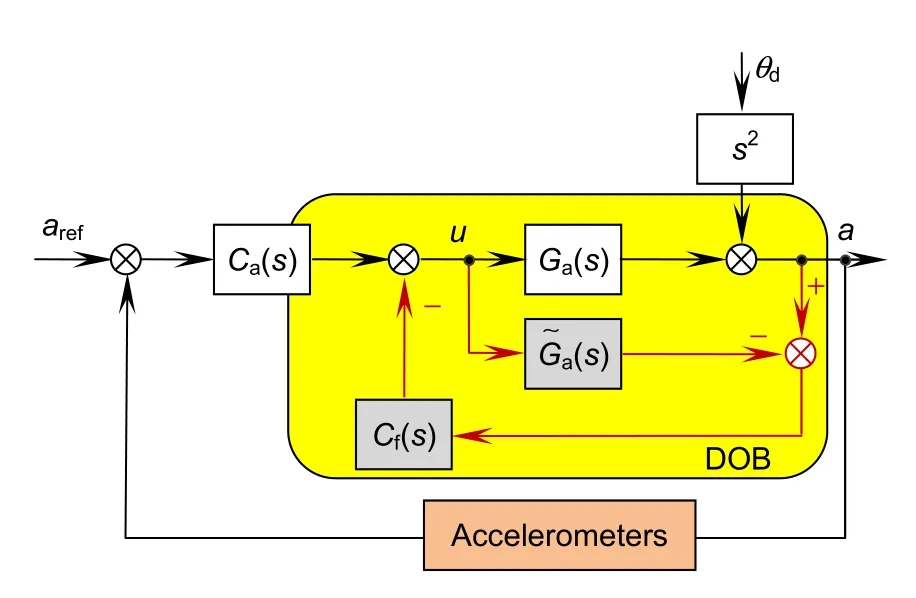
图7 加速度扰动观测器结构框图[75] Fig. 7 Schematic diagram of acceleration disturbance[75]

图8 扰动抑制能力全频段对比 Fig. 8 Comparisons of disturbance rejection

图9 1.2 m墨子号通信望远镜[76] Fig. 9 1.2 m MoZi communication telescope[76]
4) 双电机同步控制技术
另外一个加速度反馈的应用案例是在光电跟踪系统的俯仰轴电机控制驱动。采用单电机驱动俯仰轴驱时,由于惯性力矩的存在,装有编码器的机械端响应滞后。再者,当驱动大负载的时候,必须成倍增加电机尺寸,从而增加系统的重量。此外,单电机驱动容易导致立柱温度单边剧烈变化,引起一边变形,从而影响测量精度。双电机驱动光电系统Photo-Sonics公司有研究,并在官方网站上公布相应的跟踪设备(Super Radot Tracking Mount)如图11。在国内,张孟伟、杜俊峰等率先研制[77]了基于双电机驱动的光电跟踪控制设备,提高了大型光电跟踪设备性能。区别雷达、天线、工业伺服等其他控制系统,多电机驱动通常与皮带、齿轮、连杆一起使用,减小传动间隙或者提高传动比。而光电跟踪设备是刚性轴连接下的直接驱动,需要关注同步控制以及扰动补偿方面的技术问题。通过理论分析以及实验验证(如图12),双电机与单电机的驱动俯仰轴控制特性的主要谐振频率几乎相同,而双电机驱动的控制系统反谐振频率是单电机驱动系统的1.4倍。
为了减小基于双电机驱动系统的电机力矩波动以及摩擦力矩的干扰,提出了基于电流跟随的加速度反馈控制方法实现力矩同步。基于电流跟随控制方法就是让一个主电机的电流回路跟随另外一个从电机的电流闭环回路,在负载端速度反馈是一个大闭环回路,直接作用到主电机电流环路的输入端上。从图13以及图14的实验结果可以看出:无论是在正弦轨迹跟踪还是直线跟踪,基于加速度反馈的控制系统都能进一步克服扰动,提高跟踪精度。
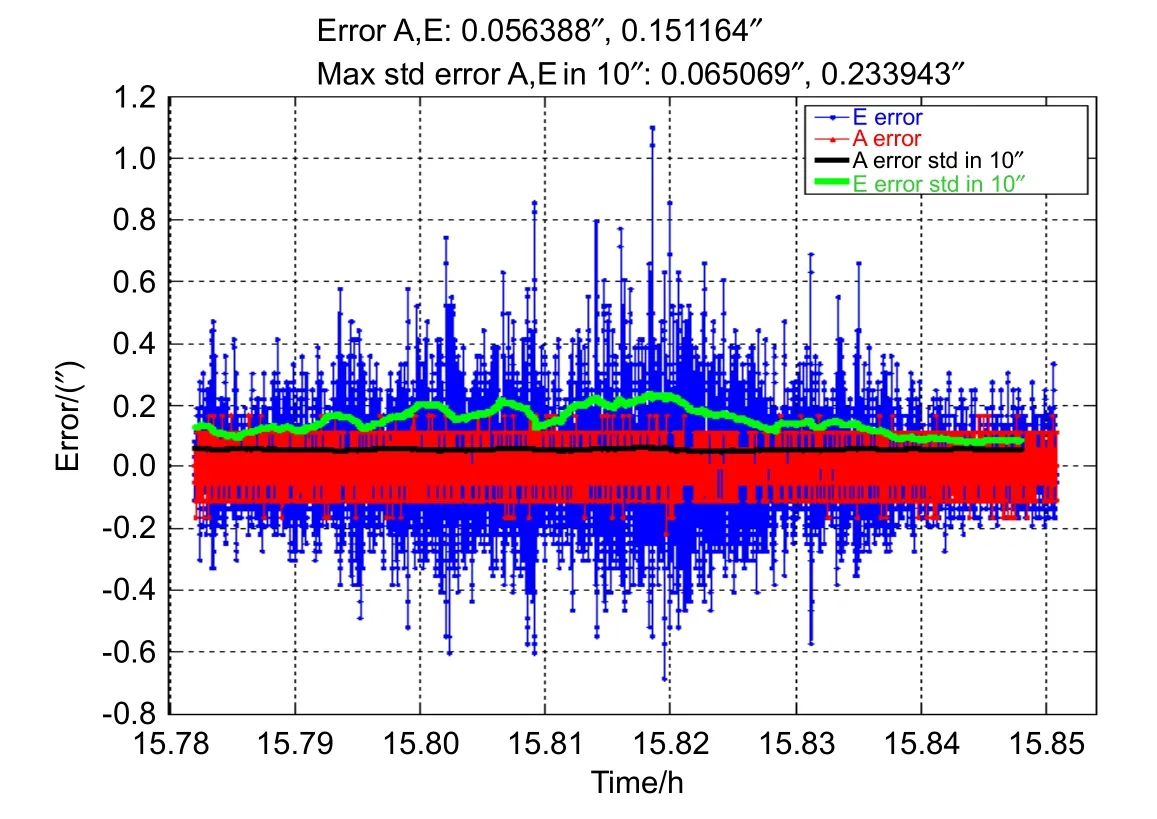
图10 1.2 m望远镜风扰下的定位精度 Fig. 10 The tracking accuracy of 1.2 m telescope in the condition of wind disturbance

图11 双电机驱动光电跟踪装置 Fig. 11 Equipment of dual-motor tracking control system
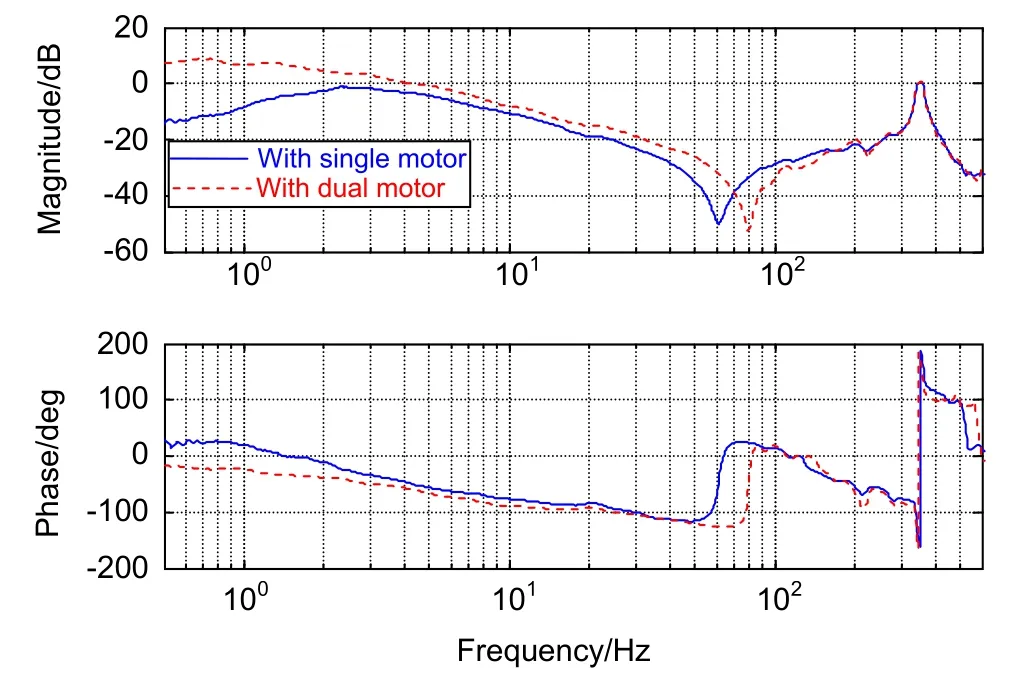
图12 单、双电机速度开环相应 Fig. 12 Open-loop velocity Bode response
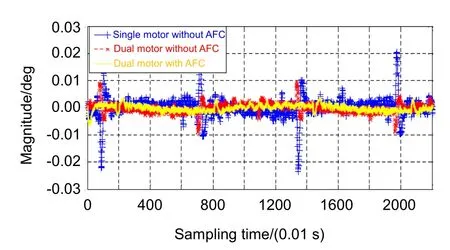
图13 单、双电机正弦轨迹跟踪误差 Fig. 13 Tracking error of single and dual motor sinusoidal trajectory
5) 非直接齿轮传动控制技术
无论是有刷、无刷有槽力矩电机还是基于音圈的无槽直接驱动传动系统,尽管可以提供快速、高精度相应能力,但是随着负载增大,驱动惯量变大,直接驱动需要更大的功率,从而导致电机的体积、功耗、重量迅速增加。针对有限条件下的光电跟踪系统应用领域,尤其是机载、星载、无人系统等运动平台上的光电跟踪系统,研究非直接驱动系统有着重要的应用 价值。利用复合轴控制系统,可以在非直接驱动系统中嵌入灵巧性高性能子轴,相互配合发挥各自的优势,可以获取低功耗、小体积、轻质量、高精度、稳定性的跟踪性能。在现有的非直接传动控制领域,柔性带、蜗轮蜗杆、杆丝、谐波传动都是以齿轮传动为基础的,因此研究高精度齿轮传动控制系统具有重要的意义。齿轮传动中需要解决的最本质问题就是克服齿隙和摩擦等难于建模的非线性扰动力矩干扰等。自适应控制、变结构控制、反步控制、模糊控制等先进控制技术是目前研究热点,并在齿轮传动控制系统中有很多成功的应用。但是这些方法共同的特点就是需要精确控制或者扰动模型的辨识,并且一般是基于性能最坏的情况下设计的,往往需要在闭环精度和系统鲁棒性之间做出平衡。在这里提出一种基于不依赖模型的DOB控制方法[78],利用电机端的速度和负载端之间的速度之差来检测扰动的变化实现扰动补偿,图15给出了基于扰动观测器的齿轮控制系统简化框图。根据图15可以得出输出速度为
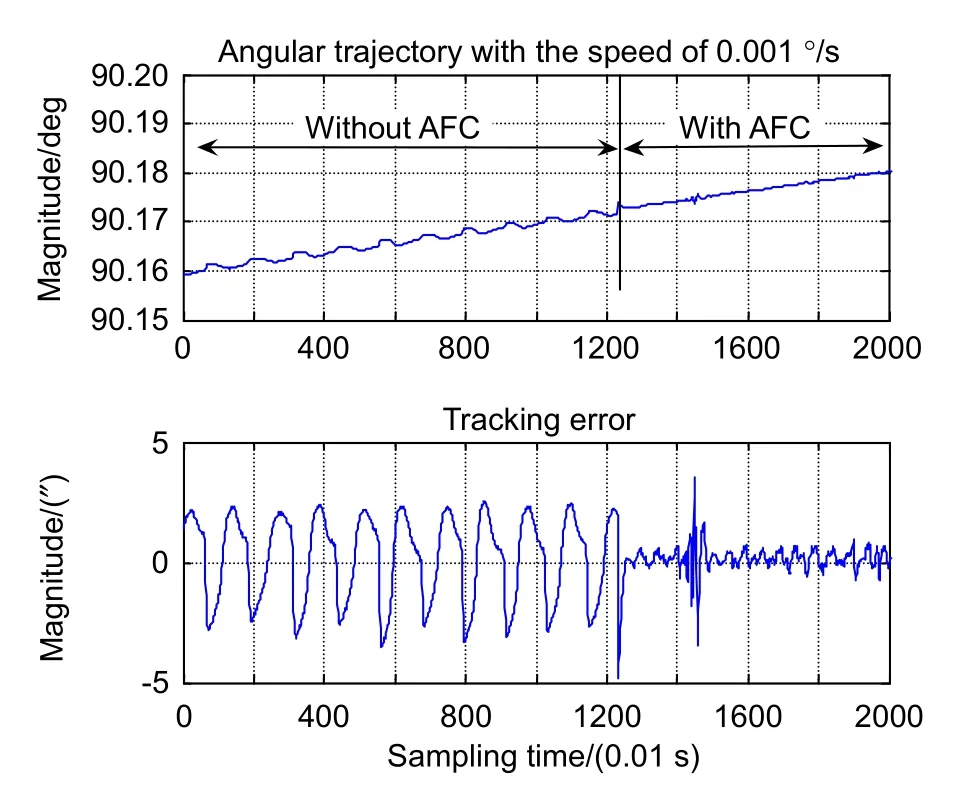
图14 基于加速度反馈的直线轨迹跟踪 Fig. 14 Linear trajectory tracking based on acceleration feedback


图15 基于观测器的齿轮控制结构图 Fig. 15 Schematic diagram of a gear-box control
从上式可以看出,只要滤波器设计为低通类型,就可以对扰动较好地进行抑制。相比经典的双环路跟踪,采用该方法在正弦轨迹跟踪中是有效的,能够很好地消除非线性扰动的影响,跟踪精度提高3倍以上。由此看出基于不依赖模型的DOB控制方法能有效地抑制行齿轮传动存在的间隙、摩擦等非线性扰动,从而满足高精度的快速目标跟踪性能。非直接驱动控制系统的研制推动光电跟踪设备向着智能化、小型化的方向发展且同时满足高跟踪精度、低功耗。
克服内部扰动的精密驱动控制技术,是走向高精度跟踪的第一步。采用线性执行器以及高精度传感器(编码器、加速度传感器、速度传感器等)是消除内部扰动的直接有效方式。加速度反馈实现对力矩的闭环,可以减小力矩的干扰,从而提高控制性能。目前,高带宽的角加速度信号是由线加速度计通过差分获取的,不可避免会有力矩不均匀引起的测量误差,以及安装误差。现有的角加速度传感器都是基于流体力学原理,带宽窄,并且低频性能不高。因此,如何获取高带宽、高分辨率的角加速度信号是一项重要的工作。针对执行器本体,如何检测电流或者电压的变化实现其闭环控制,提高驱动水平非常重要。目前的现有的PWM驱动总是会受到电压死区、非线性开关的影响,如何提高其线性水平极其关键。扰动观测器控制是对现有反馈控制的增强,不需要增加传感器的数量以及对模型的精确依赖,如何将非线性控制策略比如变结构控制、反步控制、自抗扰控制、模型预测等相结合将是未来发展的重点方向。
2.2 惯性稳定技术
相比于静止平台如地基的光电跟踪装置,应用在运动平台(车载、机载、星载、舰载等)的光电跟踪系统必须克服载体运动、振动引起的光轴抖动。因为抖动会降低光电跟踪系统的成像质量,如果抖动的频率在跟踪环路的带宽之内,影响可以忽略。但是由载体带来的光轴晃动通常是一种宽频的扰动,由于控制带宽的有限性,跟踪回路难于抑制这些扰动,从而降低系统的跟踪精度,严重的会导致光电跟踪系统无法捕获或者稳定跟踪目标。抑制光轴抖动又叫视轴稳定,主要的技术手段有以下几种:图像稳定、载体平台稳定、惯性稳定等,其中应用最广、最通用的为基于惯性传感器测量的惯性稳定技术。光电跟踪系统中的惯性稳定平台技术分为稳定相机(稳定跟踪架)、稳定倾斜镜、稳定信标光以及它们的组合[33]。惯性稳定技术在光电跟踪系统中的研究早在上世纪七十年代就有体现,主要集中在稳定框架和反射镜系统以及装置上。
美国在上世纪九十年代对高精度视轴稳定技术进行研究,并开展了高空气球实验,深入地研究运动平台下光电跟踪控制系统。国内西安应用光学研究所、中国科学院光电技术研究所、中国科学院长春光学精密机械与物理研究所等相关单位均对运动平台光电跟踪系统的视轴稳定开展了一系列研究[36-39]。
1) 稳定跟踪架
利用惯性传感器测量抖动,直接将光电跟踪系统的视轴稳定于惯性空间,可以通过以下方式实现:一是直接反馈闭环控制;其二为前馈控制又称为捷联式稳定[79]。在捷联式稳定系统中由于惯性传感器(陀螺、加速度计)直接安装在载体上,采用相对传感器测量光电跟踪系统与载体之间的运动关系,用于结算载体坐标系到光电跟踪坐标系中的抖动,从而前馈抵消测量的扰动。由于存在测量、结算误差,更重要的是捷联稳定方式对精确控制模型要求较高,在相同使用条件下,直接反馈惯性稳定技术的扰动抑制性能要更好,并且由于反馈的作用,对传感器的噪声、带宽、精度等参数相对不敏感,控制系统的鲁棒稳定性更好。多框架惯性稳定技术(如图16)是当前的研究热点[36-38],在机载、车载、舰载等运动平台上可以实现小于10 μrad的跟踪精度。图17是L3、FLIR公司的产品,代表国际最先进的多框架光电跟踪设备。由于外框架采用齿轮驱动以及内框架采用线性电机驱动,整个系统非常紧凑,同样的问题就是如何克服惯性运动(外部扰动),提高内框架的扰动抑制能力是重要的关键技术。基于加速度控制的陀螺反馈的光电跟踪系统,视轴稳定精度有较大的提高。
2) 稳定倾斜镜
稳定跟踪架受到负载重量、体积、功耗等因素影响,从而带来带宽限制,视轴稳定精度会受到影响。尤其是面向大口径的光学负载,稳定带宽受到谐振频率影响,扰动抑制能力变差。反射镜(倾斜镜)通过偏转改变光线稳定视轴,由于不需要承载主光学系统,可以实现高带宽,尤其基于音圈以及压电的倾斜镜分辨率可以达到纳弧度。因此,稳定倾斜镜成为实现高精度,特别是微弧度的视轴稳定系统的关键技术[80-83]。稳定倾斜镜可以单独使用如图18所示的方式[82-83]。潜望镜系统(图19)就是采用稳定机架倾斜镜方法。采用该方式进行视轴稳定,需要将相机的视轴同反射镜的旋转轴平行或者重合。这种机架反射镜稳定系统虽然不需要承载光学负载,但仍然需要像机架一样角度运 动,负载也比较大,因此带宽、精度会受到限制。
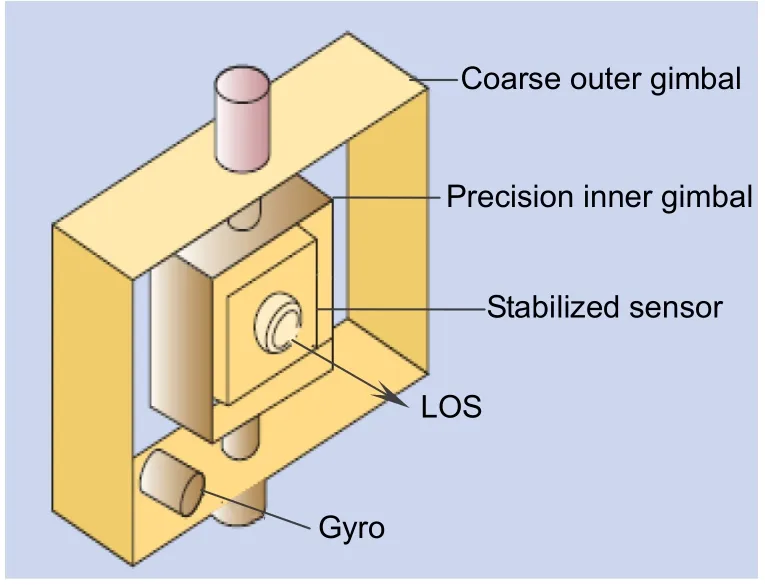
图16 惯性稳定跟踪架[36-38] Fig. 16 Schematic diagram of inertial stabilization gimbals[36-38]

图17 多框架光电跟踪设备 Fig. 17 Inertial equipment of multiaxis gimbals

图19 潜望镜反射镜稳定装置 Fig. 19 Inertial equipment of periscopic sight
3) 复合稳定
将跟踪架与高性能倾斜镜相结合的视轴稳定方式是目前的主流方式如图20[35]所示:跟踪架实现大范围的视轴稳定,倾斜镜进一步校正粗稳定残差,可以大大减小惯性运动,提高视轴稳定精度。尽管倾斜镜可以实现高带宽控制,但无法将惯性传感器直接反馈闭环快速倾斜镜,最重要的原因就是倾斜镜的运动同视线的关系是1:2。
为了消除上述运动中的关系,利用惯性传感器进行辅助稳定,必须分离机架的惯性角速率获得震动信号,然后实现前馈控制倾斜镜。该方案的实现思路如图21所示[41]。

图20 惯性稳定倾斜镜[35] Fig. 20 Inertial stabilization tip-tilt mirror[35]
4) 稳定信标光
为了彻底解决1:2的运动关系,发挥高带宽、高分辨率倾斜校正作用,基于信标光的视轴稳定技术(如图22所示—也称为惯性伪星参考装置(IPSRU)),在高空气球的光电跟踪系统中首先提出[84-88],视轴稳定精度达到了0.04 μrad,在工作频带范围内(扰动幅值为417 μrad,频带为0.4 Hz ~312 Hz),全频带的扰动闭环抑制能力优于50 dB,并且在1 Hz处的控制能力为92 dB。为了满足更高的5 nrad视轴稳定精度,Draper实验室在2002年提出研究新一代惯性伪星参考装置,基本思想是采用低噪声陀螺和高带宽的角速率传感器ARS-12进行数据融合,实现更高带宽、更高精度的惯 性稳定环路。由于受到传感器和相关技术制约,该系统没有后续研制。类似的惯性稳定测量装置比如由波音SVS公司开发的SIMS系统,本质上与IPSRU相同,主要的区别在于,为了节约成本以及商用化要求,SIMS采用了低成本的陀螺与角速率传感器ARS-12相融合获取高性能反馈信号实现惯性平台稳定控制。惯性伪星参考装置对扰动的抑制主要来自两个方面,一方面通过柔性的机械结构设计,对基座传递的中高频扰动进行隔离,以此减小对高控制带宽要求,从而减小对电机的要求;另一方面通过惯性传感器以及线性执行机构实现高带宽反馈闭环,提高低频的抑制能力。因此,该装置的视轴稳定能力为主、被动抑制能力之积[30]。近年来,为了满足小型化的要求,美国ATA公司推出改进型的惯性视轴参考稳定装置MIRU-LC,扰动抑制带宽达到了300 Hz,其稳定精度达到了20 nrad,该装置采用微机械MEMS陀螺和角速率传感器ARS-14进行数据融合。国内对基于信标光视轴稳定技术的研究并不晚,马佳光、任戈[88]等也在2000年左右研制了该技术,校正了全系统的扰动,提高了光电跟踪系统在运动平台上的跟踪精度。
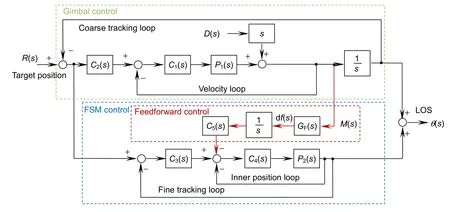
图21 前馈控制稳定倾斜镜[41] Fig. 21 Feedforward control of tip-tilt mirror[41]

图22 基于信标光的视轴稳定技术[84-88] Fig. 22 Beacon-based line of sight stabilization system[84-88]
IPSRU系统总的抑制能力由系统的主动抑制能力(稳定带宽)和被动隔振能力(隔离频率)组成,其精密稳定平台的对象特性由一个二阶环节(被动隔振)和多个谐振环节组成。二阶环节的谐振频率由柔性支撑结构的刚度系数决定,降低刚度系数可以降低二阶环节的隔离频率。然而,精密稳定平台二阶环节的谐振频率与高阶谐振环节的谐振频率呈正相关性,降低柔性支撑的刚度系数势必也会降低高阶谐振环节的谐振频率。由于降低二阶环节的谐振频率与提高高阶谐振环节的谐振频率存在矛盾,单级稳定单元无法实现在获得足够的被动隔振能力的同时,又能保证平台的主动控制带宽。为了进一步提高扰动抑制带宽,2017年中国科学院光束控制重点实验室提出并研制一种基于复合稳定平台的原理装置(如图23)[89],采用上下串级固定的连接结构使得此稳定平台实现大角度运动。
相应的复合稳定实验平台(如图24),包含了扰动镜,次稳定平台,数据处理模块,主稳定平台,驱动模块以及对应的PSD传感器和电涡流、陀螺。PSD为光学探测器用以测量目标光源在其靶面的位置信息。主稳定平台直接刚性连接在次稳定平台上面,共同用来实现光束高的精度偏转控制,其光束的角度位置由PSD测量,扰动装置用来模拟运动载体的角振动。值得注意的是,对于复合稳定平台上下串级固定的连接结构,由于主稳定平台柔性支撑,会造成次稳定平台的对象中出现更多的谐振环节,带来模型不确定性。针对这种典型的柔性控制系统,必须考虑控制带宽以及闭环的问题。实验结果如图25所示,表明复合稳定平台较一级精密稳定平台在全频段的扰动抑制能力都有极大的提高。

图23 复合稳定平台示意图[89] Fig. 23 Schematic diagram of dual-stage platform[89]

图24 复合稳定实验平台 Fig. 24 Dual-stage stabilization platform in experiments
运动平台上的光电跟踪系统离不开惯性稳定技术,如何做到“先稳像,再跟踪”是研究的基本思想以及目标。无论是多框架控制,还是倾斜镜校正,甚至是基于信标光的惯性稳定,高带宽控制始终是最重要的核心思想。因此,高带宽、高分辨率的惯性传感器以及高线性、快速响应的执行器必然得到高度的关注。倾斜镜可以提供很高的闭环带宽,但是校正光线需要解决1:2的运动关系,目前在这方面的工作仍然效果不佳。尽管基于信标光的稳定方法能够校正全系统的光轴振动,具有很高的闭环性能,但是要求更高的传感器以及驱动方式。其次,也需要对惯性传感器中的振动以及跟踪信号区分,实现解耦控制。尽管国内对多框架的跟踪系统取得了一系列成绩,如中国科学院长春光学精密机械与物理研究所,西安光学应用研究所等,但同国外FLIR、L3公司的光电系统相比仍然差距很大。将多框架和快速倾斜镜相结合,实现多轴稳定是惯性稳定技术的重点发展方向。
2.3 振动抑制技术
光电跟踪系统的振动主要是指由结构共振、突然的冲击、载体的运动等引起较高频率的视轴晃动。从振动对视轴的影响来看,主要分为线振动和角振动。通常讲的六自由度振动就是指三个方向线振动以及三个方向角的振动。线振动如果不引起光电跟踪系统中的柔性共振,则它对光轴的影响是很小的,主要是因为观测的距离很远,等效的角度就非常小了。角振动直接造成光轴的晃动,必须采用隔振器进行减小。被动隔振通过能量耗散的方式易实现,技术成本低,对高频振动具有很好的抑制作用。但是,被动隔振技术不适用于有随机和低频振动的系统[90-92]。考虑到承载力以及隔振效果,针对在车载、舰载、机载、星载平台的光电跟踪系统来说,大都采用金属弹簧、橡胶垫、钢丝等设计的被动隔振装置。在机载光通信中,Wei团队[93]提出了基于磁流变悬浮技术的多框架光电跟踪系统用来隔离振动,提高定位精度。此外在空间应用中,Deraemaeker团队[94]设计了一种Cubic结构的 Stewart六轴隔振器,其振动衰减率能达到-40 dB/decade。此外,Vahdati[95]等针对高频振动设计了一种吸振器并通过实验验证了该方案的有效性。大多数的有源隔振都是针对空间环境的光电跟踪系统应用,因为空间环境没有重力影响,其次振动的幅度小(不超过mm量级),有源隔振结构需要的能量很低。基于Cubic型的Stewart平台由于六轴之间相互正交不耦合,既可以实现隔振又能够提供小角度和位移的指向功能,是空间微振动抑制的一项重要和实用技术。为了实现更强振动隔离能力,美国Lockheed 公司首先提出并研制了载荷扰动隔离(disturbance-free payload, DFP)器[96-99],相关理论以及实验表明其隔振性能为-40 dB~-80 dB,可以有效地解决了有效载荷高精度指向与振动隔离的一体化控制问题。因此,载荷扰动隔离平台在下一代大型空间望远镜的应用中能够发挥极大的作用。
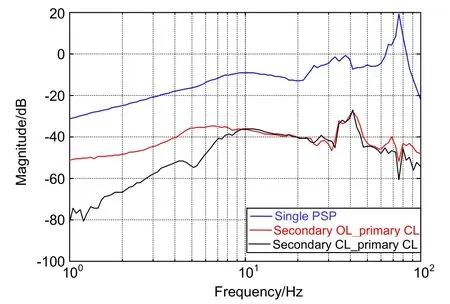
图25 主动抑制频率响应 Fig. 25 Frequency response of active disturbance rejection
目前,国内在基于Stewart平台的光电跟踪技术方面的研究还较少。中国科学院长春光学精密机械与仪器研究所[100]提出了基于Gough-Stewart 构型的六自由度机构,可以同时实现六个自由度的运动,该平台集精密指向功能与扰动隔振功能于一体,由于具备高刚度能力可以直接支撑负载,节省了空间、减少了发射成本、提高空间任务的成功率。北京航空航天大学黄海、李炜鹏[101]设计了基于立方体类型的Stewart平台用于隔离六自由度的振动,可以在一定角度实现跟踪。赵浩[102]针对扰动隔离系统做了数学建模与仿真研究,验证了采用扰动隔离系统在提高光学载荷系统的指向精度及稳定度方面效果显著。杜超[103]针对扰动隔离系统的控制稳定性能进行了研究,建立了控制系统传递模型并设计了控制器,通过仿真验证了良好的隔振特性。基于并联结构的有源隔振指向跟踪技术是非常有前途的研究方向,特别适合空间微振动抑制和精密指向,将其与卫星平台、快速倾斜镜联合是未来光通信、空间望远镜等光电跟踪系统最佳的一种模式,Lei[104]给出了如图26描述的装置,采用Stewart平台抑制高频振动以及实现粗指向,卸载快速倾斜镜的低频大幅度角运动,在实验室实现了微弧度跟踪精度。Francesconi[105]提出了图27的一种用于微小卫星激光通信的光电跟踪系统,采用了一种连杆方式实现粗跟踪平台,在此基础上利用快速倾斜镜获取优于10 μrad的跟踪精度。其他类型的复合轴隔振结构[106-107]光电跟踪系统同样也是为了隔离振动,提高视轴稳定精度。
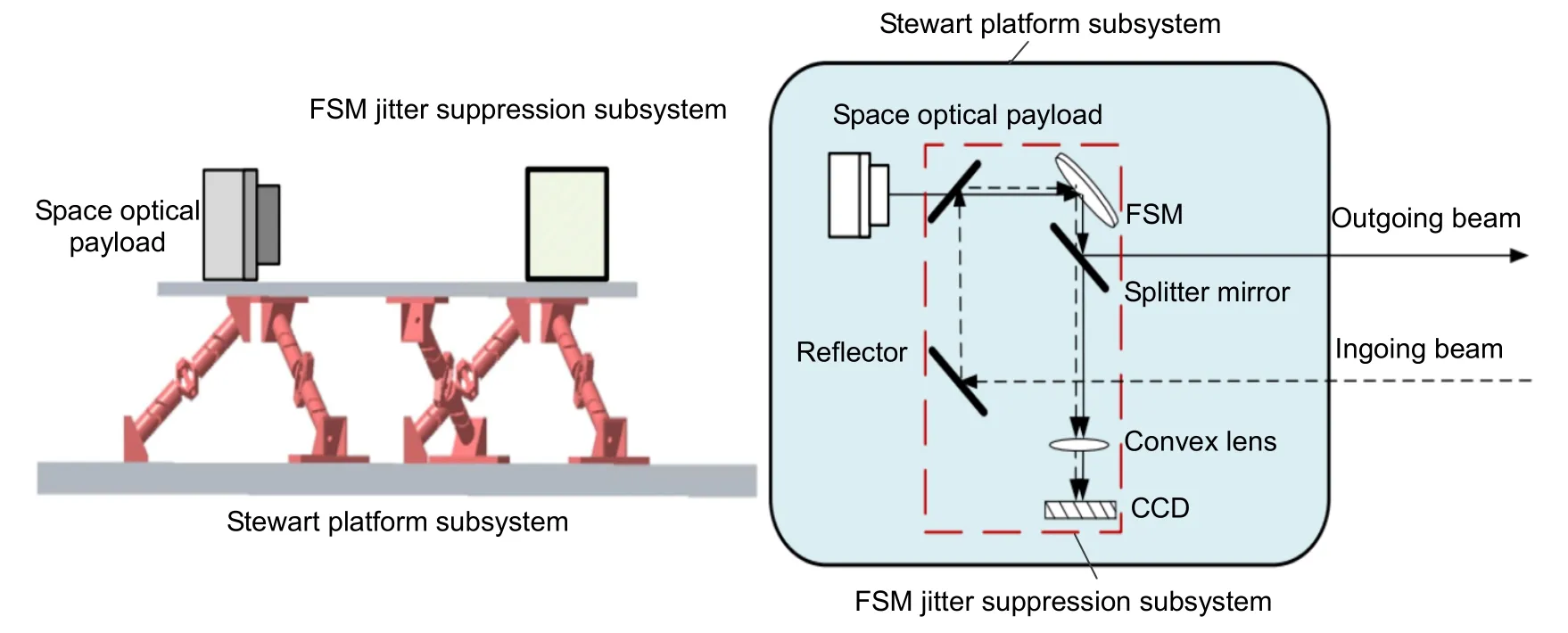
图26 基于Stewart平台的光电跟踪系统[104] Fig. 26 Tracking control system based on Stewart platform[104]
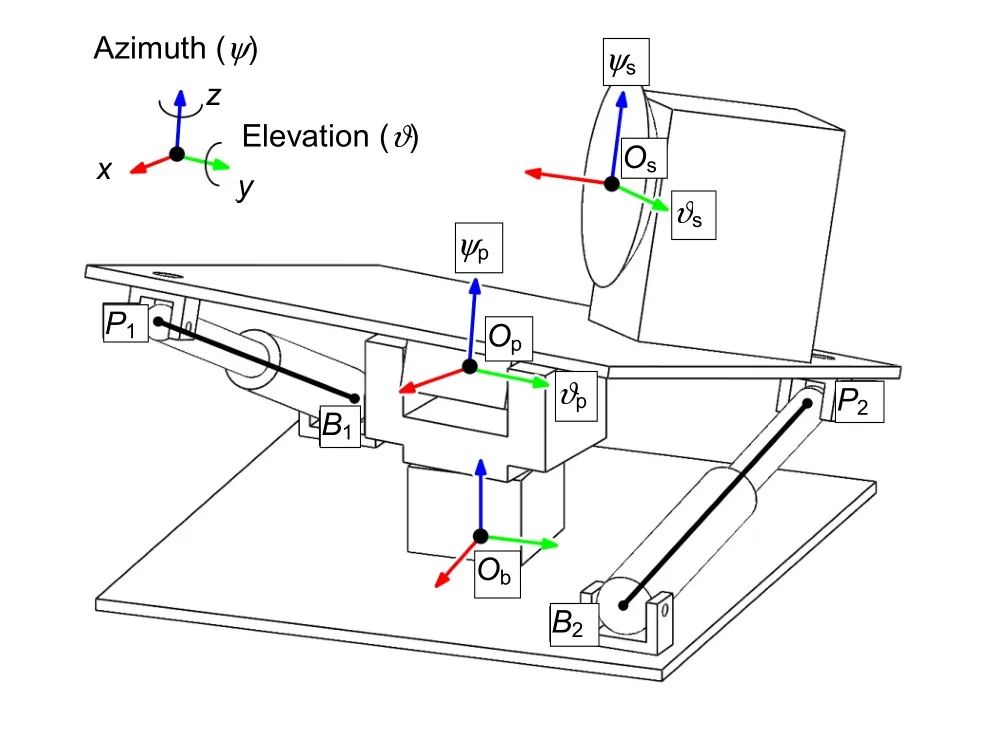
图27 基于连杆的并联平台光电跟踪系统[105] Fig. 27 A tracking control system of a link-parallel mechanism[105]
3 视轴跟踪技术
视轴跟踪是指利用图像传感器或者轨迹数据对感兴趣的动态目标实时地闭环。目标轨迹一般难于精确获取,所以大部分引导跟踪只用于目标的捕获。基于图像的视轴跟踪才是最终的目的,也是跟踪精度的直接体现。在光电跟踪系统中图像传感器只提供目标差,由于图像传感器积分成像以及处理、传输存在大量延迟。因此,高精度视轴跟踪是一个颇具挑战性的工作。提高控制系统增益或增加环路积分个数[108]以提高开环系统的无静差度,从而提高跟踪精度。但是,同时要特别注意多个积分以及高增益将影响甚至破坏系统的稳定性。前馈控制是在闭环控制系统中增加开环控制支路用来提供输入信号的导数从而使系统静差度提高,可以较好地解决精度与稳定性之间的矛盾问题。然而,图像传感器由于无法直接提供目标轨迹,光电跟踪系统无法直接实现前馈控制。利用预测滤波构成等效的前馈控制将是精密跟踪技术的发展方向[108-114]。美国的“火池”雷达复合轴子系统采用滤波构成同轴跟踪系统对测地卫星跟踪,将20″跟踪误差降到0.2″均方值。美国空军东靶场测量研究所利用同轴跟踪改造了两部EPS-16雷达,随机误差降到5.4″,系统误差降到11″。基于Kalman滤波的共轴跟踪,可以将光电跟踪的精度提高了3~5倍。此外,作为另外一种等效的前馈控制器,中国科学院长春光学精密机械与物理研究所王建立[109]提出速度、加速度滞后补偿,并成功应用在光电跟踪系统中。本小节阐述了近几年关于视轴跟踪的最新研究成果,主要包括基于信号处理的手段构造前馈控制器以及复合轴控制技术。
3.1 滞后补偿技术
为了消除延迟对闭环系统的影响,在1957年Smith提出了一种基于模型的预估补偿控制方法,其基本思想是基于被控对象的标称模型估计延迟带来的误差,并将估计得到的误差量前馈到控制器输入中,以实现对延迟的补偿,改善系统的动态性能[115-117]。其控制结构框图如图28所示。
当Gm=G,Lm=L时,闭环系统的特征方程将会变为标准的特征方程形式,不受延迟的影响。从而使得系统的过渡过程形状和品质与无纯滞后相同。由于对模型以及延迟的辨识精度要求很高,基于Smith预估器的延迟补偿难于发挥好的效果。其次,系统的闭环控制过程在时间上进行了推迟。
基于Smith预估器原理,利用高速的速率信息积分为位置信号预测目标轨迹实现闭环反馈,以此来补偿图像传感器的延迟,如图29所示[118]。由于是嵌入在原有的反馈控制系统中,系统的稳定会受到影响。为了平衡稳定性与性能的矛盾,通常会引入低通滤波器,控制性能将会受到限制。
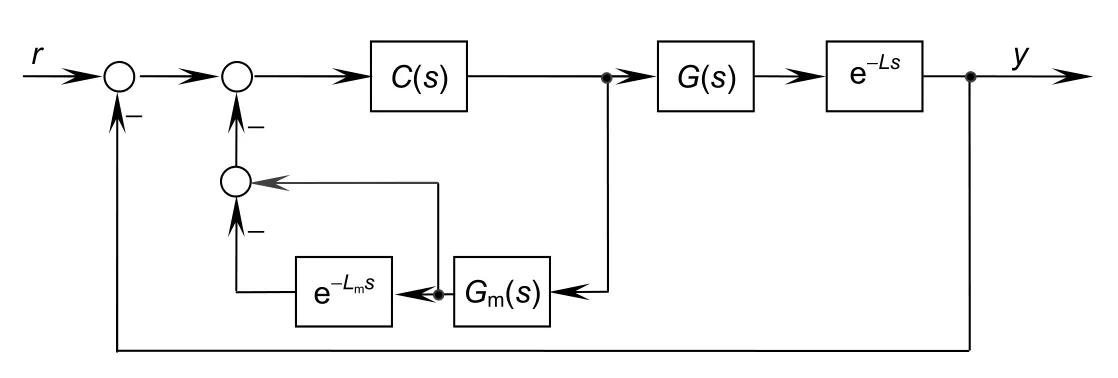
图28 标准的Smith预估器预测系统[115-117] Fig. 28 Predictive control based on a standard Smith method[115-117]

图29 基于改进Smith预估器预测系统[118] Fig. 29 Predictive control based on an improve Smith method[118]
比较有意思的另外一种思路,是利用分数阶控制器代替传统的PI控制器。图30展示了一种基于分数反馈控制的延迟补偿技术[119],利用分数阶的相位与增益平衡,提高了闭环能力。从Bode频率响应曲线可以看到,分数阶控制技术相比PI和PI-PI控制器都有2倍以上提升。但是由于采用高阶拟合的影响,放大了高频部分,控制带宽受到了限制。
3.2 等效前馈控制
前面的方法是从反馈的角度提高增益,都会受到相位滞后的限制,因此改善的精度有限。前馈控制是解决带宽与稳定矛盾的重要手段。但是在光电跟踪系统中,图像传感器不能测得目标位置信息、速度、加速度信号,无法直接完成前馈控制。必须采用等效的控制思路:目标位置可以由视轴位置加视轴和目标之间的偏差(line of sight error)得到[120-121],这方面的工作在国内外的光电跟踪系统中都已经实验和理论证实。由于图像传感器带来的信号延时,必须将位置传感器 (编码器)和视轴偏差(脱靶量)在时间刻度上对齐,从而得到在时间空间上准确的目标角度位置。采用高精度实时Kalman滤波或者其他预测滤波技术获取目标的速度、加速度信息,计算前馈控制器,引入到位置反馈回路的输出端中实现等效前馈复合控制。基于位置和视轴偏差合成的等效前馈控制示意图如图31所示,系统的闭环传递函数和误差抑制函数分别为

从式(3)、式(4)可以知道,当对估计的延迟等于系统真实存在的延迟时,其闭环特征方程(分母)与传统反馈控制相同,这意味着增加的控制通道不改变系统的稳定性,但实际这很难做到,因此要求滤波器的特性表现为低通特性。由于编码器只能测量转轴上的信息,无法反应惯性空间的运动信息。一种基于视轴偏差和陀螺反馈的积分数据融合位置方法被提出,由此构成的等效前馈控制方法如图32所示[122]。从控制系统的闭环传递函数以及实验效果上看,基于速率合成的等效前馈控制方法和基于位置合成方法是等价的。值得注意的是,无论上述哪种等效前馈控制方法,由于都需要精确模型的逆,因此往往采用速度、位置甚 至加速度构成多闭环控制。高带宽的速度内环由于不存在延迟影响,相比于位置外环路,闭环带宽更高,从而为外环位置控制环路构建一个高线性度、高带宽开环被控对象。在实际光电跟踪控制系统中,高带宽速度环和高带宽位置环都可重构新的位置开环对象,相对于低速率的位置跟踪外回路,其特性可以近似为常数1。
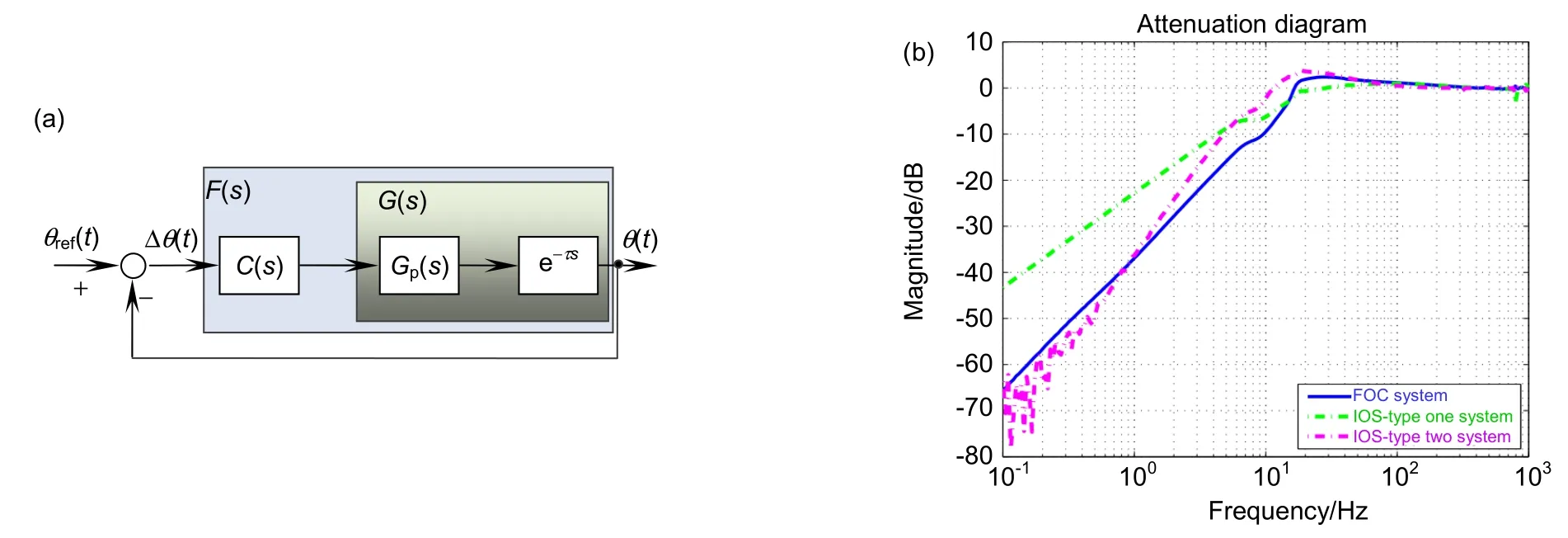
图30 基于分数阶的延迟补偿控制技术[119] Fig. 30 Fractional controller of compensating time delay[119]
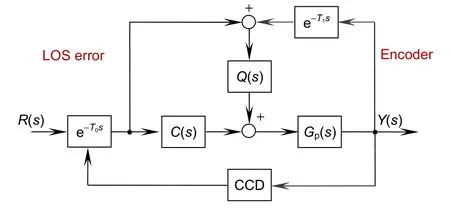
图31 基于编码器测量合成目标的前馈控制方法 Fig. 31 Feedforward control method based oncomposite of position encoder
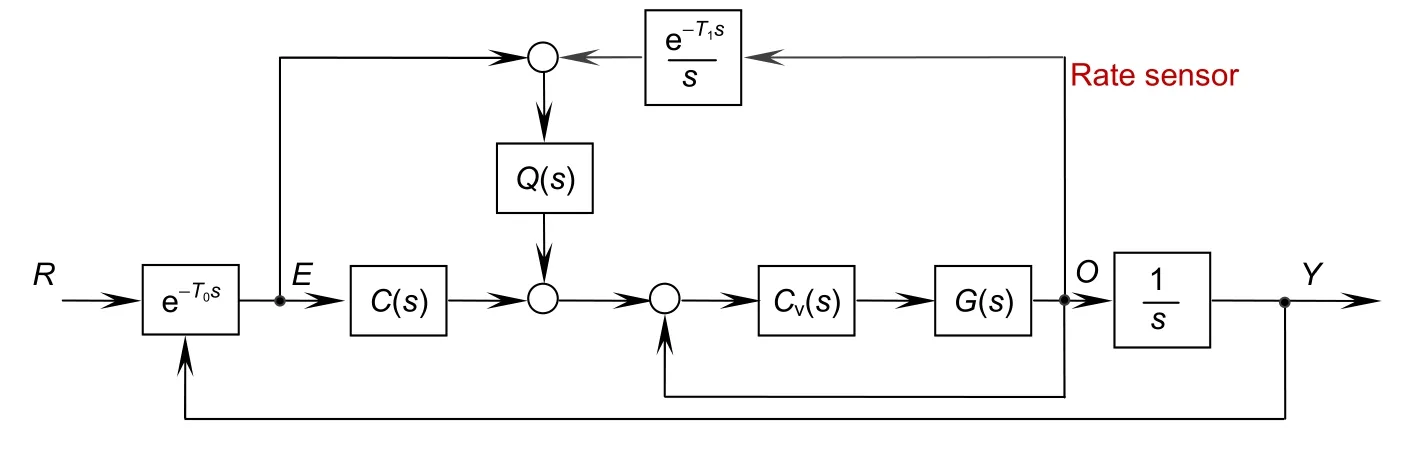
图32 基于陀螺数据融合的等效前馈控制[122] Fig. 32 Equivalent feedforward control based on fusion of a gyro[122]
虽然从控制系统传递函数上看,基于陀螺(速率信号)的积分构成的等效前馈控制同基于位置融合的方法是相同的,并已经通过仿真以及实际的实验证实。两种方法的跟踪性能是一样的。但是,基于速率前馈的控制方法既可以用于静止平台上,也可以用于运动平台上的仅有偏差测量的光电跟踪系统。为了避免积分饱和问题,可以将前馈滤波器Q(s)前移到反馈和前向通道上,这样系统工程容易实现,同时可以减小速度、加速度滞后补偿带来的相位滞后问题。上述两种技术都需要额外的传感器,并对其性能和滤波算法具有较高的要求。
高带宽的内环重构了控制对象,将图32的O点输出前向引入到速率反馈回路的输入点,由此构成了基于误差的观测器控制方法[50,59,51,123-124],如图33所示。同前面两种前馈控制方法相比较,基于误差的观测器控制方法只需要视轴偏差信息,不依赖其他的测量信息。
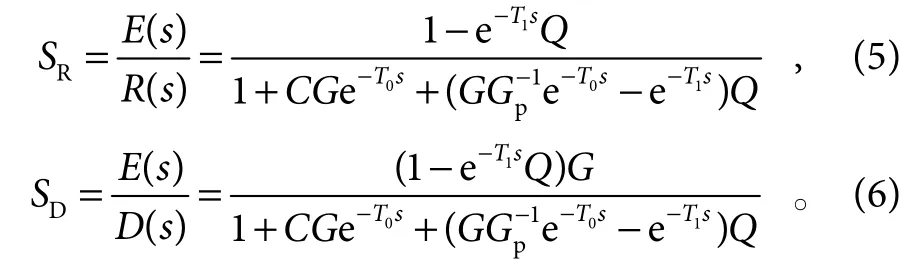
从误差灵敏度式(5)和扰动抑制式(6)传递函数可以明显看出,基于误差的观测器控制方法可以同时提高目标输入和扰动输入的控制性能。很显然,闭环系统的稳定性可以采用前面的两种等效前馈方法同样获取,并且满足同一约束条件。非常有意思的一个结论在于,基于误差的观测器控制性能可以通过优化最小化式(5)的分子项1-e-T1sQ。不考虑稳定性条件,滤波器Q=1意味着式(5)和式(6)都为零,也就是该控制方法可以将扰动和目标跟踪性能提高到极致。但是稳定性条件制约了这个滤波器的不可能,因为无论在高频甚至低频模型肯定或多或少存在不确定性,滤波器必须设计为低通类型,从而能够减小高频非建模特征对闭环稳定性的影响。幸运的是,目标的角运动和扰动的能量主要集中在低频,低通滤波器分子在低频以下近似等于零。简单的说,从控制性能角度来看,希望1-e-T1sQ含有多重积分特性,从而提高控制系统的静差度,同时也具有较高的带宽。但是从稳定性条件来看,希望低通类型的滤波器具有很窄的带宽,从而提高足够的稳定裕量。所以,低通滤波器的设计必须在稳定与性能之间做出平衡。
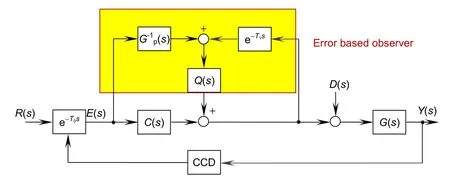
图33 基于误差观测器的等效前馈控制[50,59,51,123-124] Fig. 33 Equivalent feedforward control based on an error observer[50,59,51,123-124]
一般来说,大部分的扰动以及目标运动的频率范围表征在低频。其次,从工程实现的角度上看前馈滤波器设计为低通滤波器类型就能满足前面的分析。因此,一种具有普遍意义的广义低通滤波器被提出如下:

采用式(7)类型的滤波器可以较好地增强低频性能,并且系统的稳定性能好。缺点是低频性能的提高依赖前馈滤波器的带宽以及阶数。前馈滤波器的阶数越高,低频性能就越好,带宽就随之下降,非常适合 视轴跟踪。但是当阶数每提高一级,低频性能会提高-20 dB;反之,前馈滤波器的阶数越低导致低频性能下降,带宽会增加。从光电跟踪系统特点来看,滤波器(7)的阶数m=3,既能满足粗跟踪架的要求,也可以满足精跟踪镜的要求。
图34、图35是粗跟踪架采用式(7)所描述的三阶滤波器在50 Hz的图像传感器跟踪速度大约为13 °/s时的结果。可以看出,基于误差的观测器前馈控制方法对视轴跟踪是非常有效的。当然,对于快速倾斜镜来说,该方法仍然是有效,其闭环结果如图36∼图37所示。
正如前面所述,前馈滤波器的带宽以及阶数决定了该方法的性能。如果要消除图37中尖峰信息,采用下面类型的前馈滤波器:
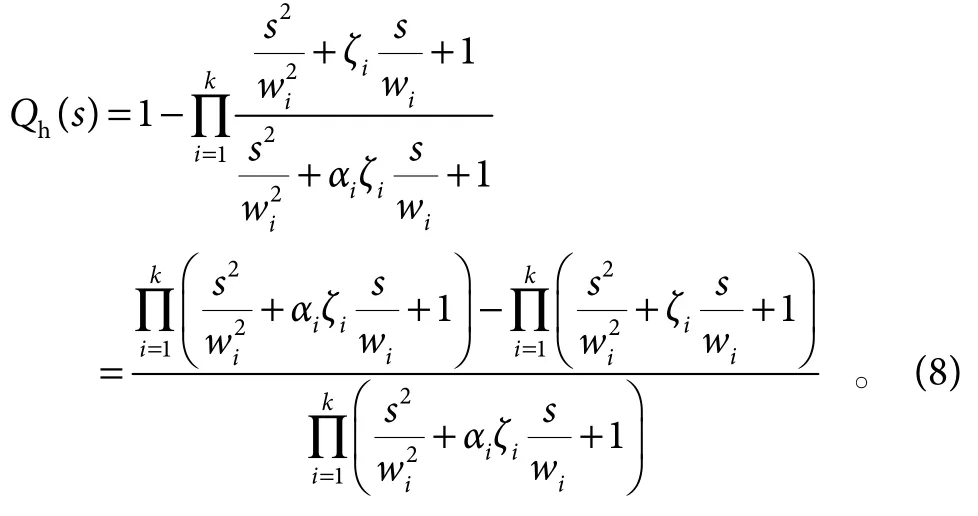
利用上式的形式,将宽带扰动看成是几个或者多个扰动中心点频率十分接近的窄带扰动的集成,抑制宽带扰动就是针对不同的窄带扰动设计相应的滤波器,最后使这些滤波器同时作用对扰动反向施力来达到抑制宽带扰动的目的。
图38所示的Q滤波器的伯德图是由式(8)实现的结果。图39是分别采用传统的比例-积分控制方法以及基于Youla参数化的改进的宽带扰动抑制方法抑制扰动后的对比结果图。可以看出,改进的宽带振动抑制方法较传统的比例-积分控制方法抑制效果有了显著的提升。

图34 方位误差跟踪响应 Fig. 34 Azimuth curves of tracking error
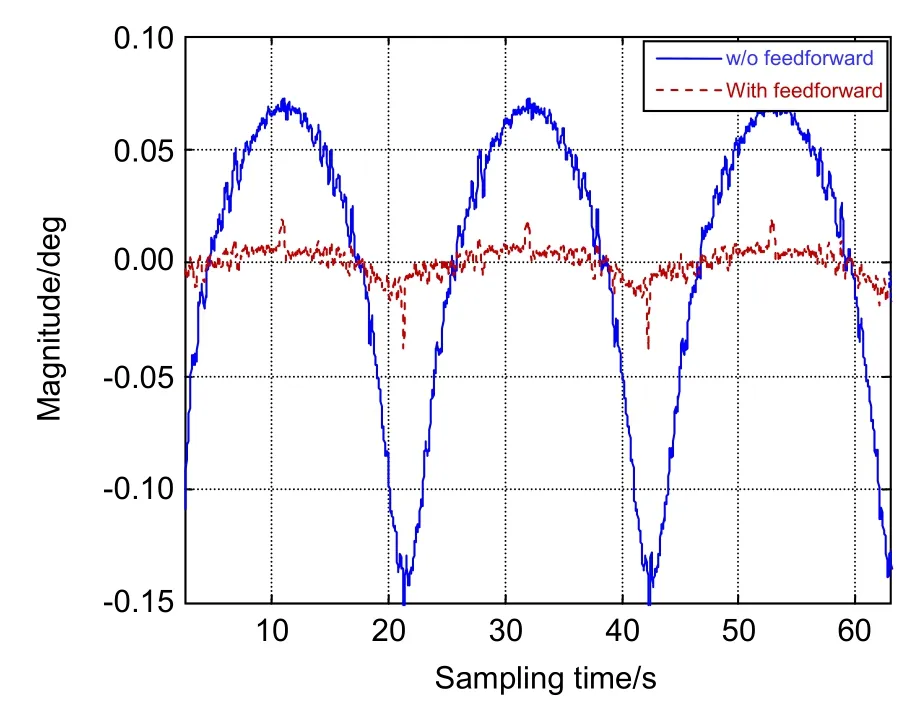
图35 俯仰误差跟踪响应 Fig. 35 Elevation curves of tracking error
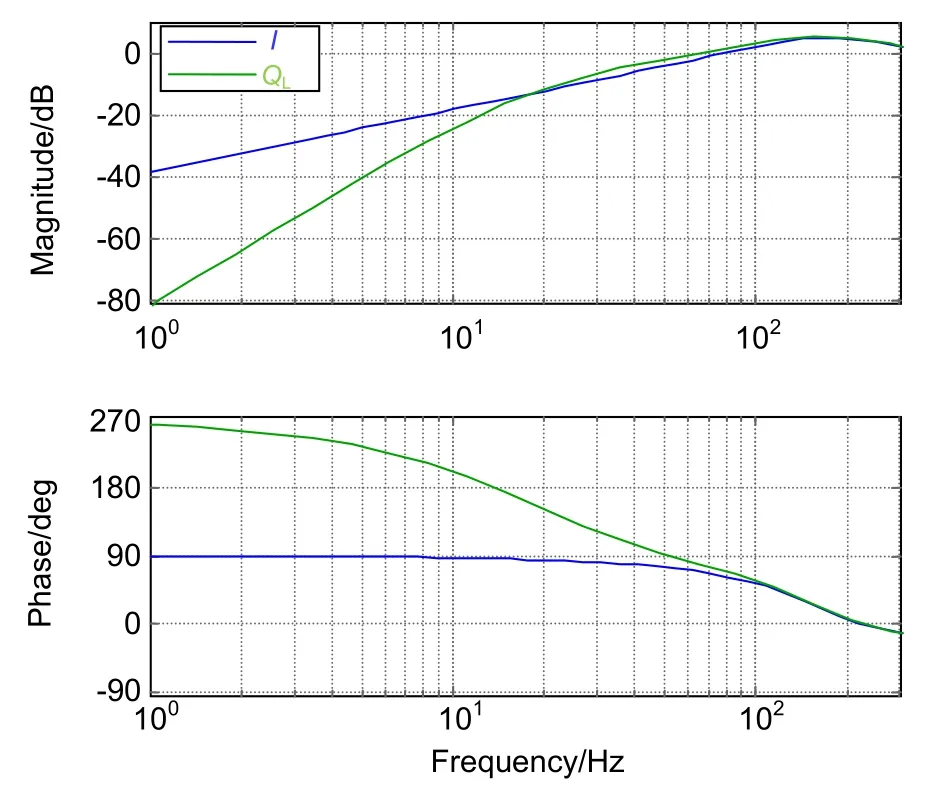
图36 误差抑制响应 Fig. 36 Bode response of error attenuation
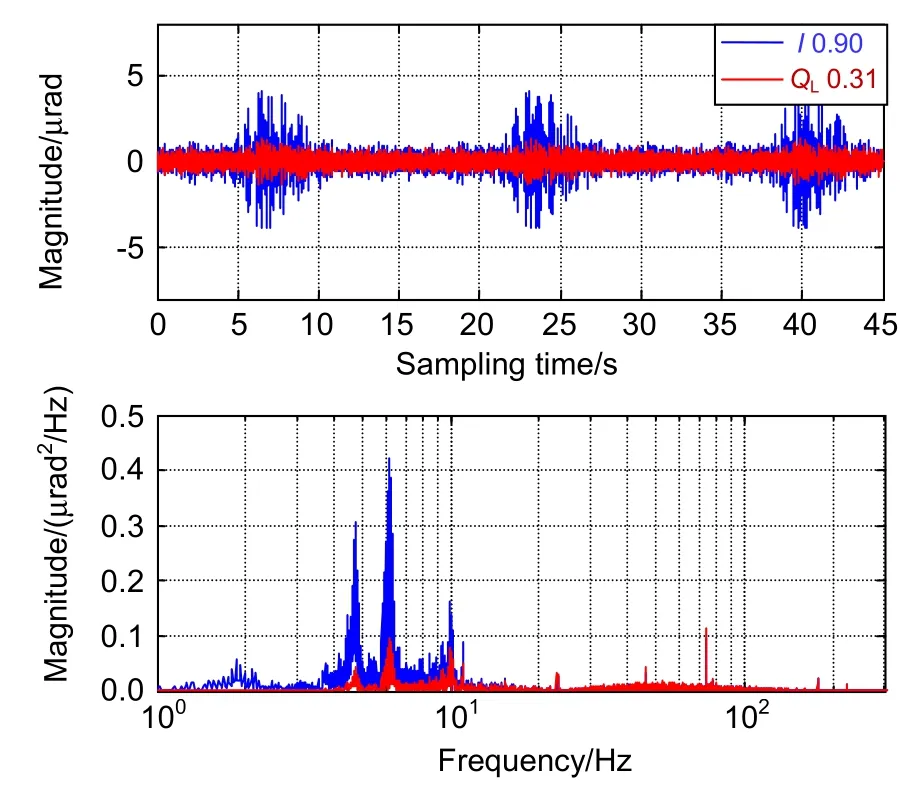
图37 跟踪误差曲线 Fig. 37 Tracking error curves
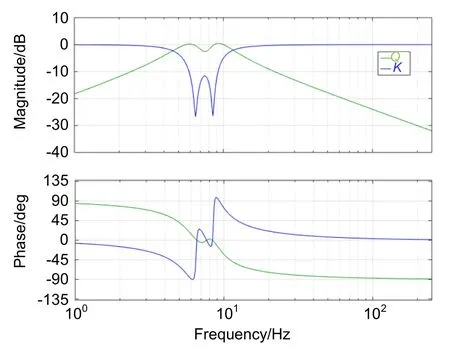
图38 Q滤波器的伯德图 Fig. 38 Bode response of Q-filter

图39 不同控制器作用下的闭环误差对比图Fig. 39 Spectra of closed-loop errors with different controllers
针对不同频率的视轴晃动,设计不同类型的滤波器。为了抑制周期频率的扰动,将前馈滤波器设计成重复控制器类型是一个非常有意义的工作,消除机械或者电源引起的共振振动。另外,将低通类型以及带通类型相结合发挥它们的优点,该工作还需要进一步深入地研究。基于误差的观测器前馈控制仅仅利用视轴偏差,在不增加控制系统带宽的前馈下增强系统的闭环性能,特别适合光电跟踪系统的应用。未来的工作就如何突破相位条件的限制,精确模型的辨识以及非线性滤波器等相关问题展开研究,进一步提高闭环系统的性能的设计。
3.3 复合轴控制技术
控制性能颠覆性的提高一般难于通过控制算法实现,主要因为控制性能由控制信号测量的精度与带宽、噪声之间的矛盾和控制模型的不确定性所导致。如前所述,复合轴控制系统可以将单一跟踪架的控制精度从数十微弧度量级提高到微弧度级,甚至亚微弧度级。 图40展示了复合轴光电跟踪系统的结构示意图,粗跟踪(机架)对运动目标进行捕获与粗指向,而精跟踪(子轴)是对前一级控制系统的残差进行更快速、更高精度的闭环校正,从而进一步提高跟踪精度。典型的复合轴光电跟踪控制系统框图如图41所示,这是一种双检测跟踪方式:粗、精跟踪回路独立控制且互不影响,但是子轴要抑制主轴的残差,要注意两个轴的带宽匹配问题。由于单检测光电跟踪系统中粗跟踪和精跟踪控制回路共用一个图像探测器,为了使得粗跟踪始终工作在一个很小的范围内,需要加入解耦支路。单检测复合轴跟踪又叫卸载型跟踪,因为精跟踪系统由粗跟踪系统(跟踪架)卸载完成,其控制结构如图42所示。
图40 复合轴跟踪系统的结构示意图 Fig. 40 Schematic diagram ofdual-stage tracking system
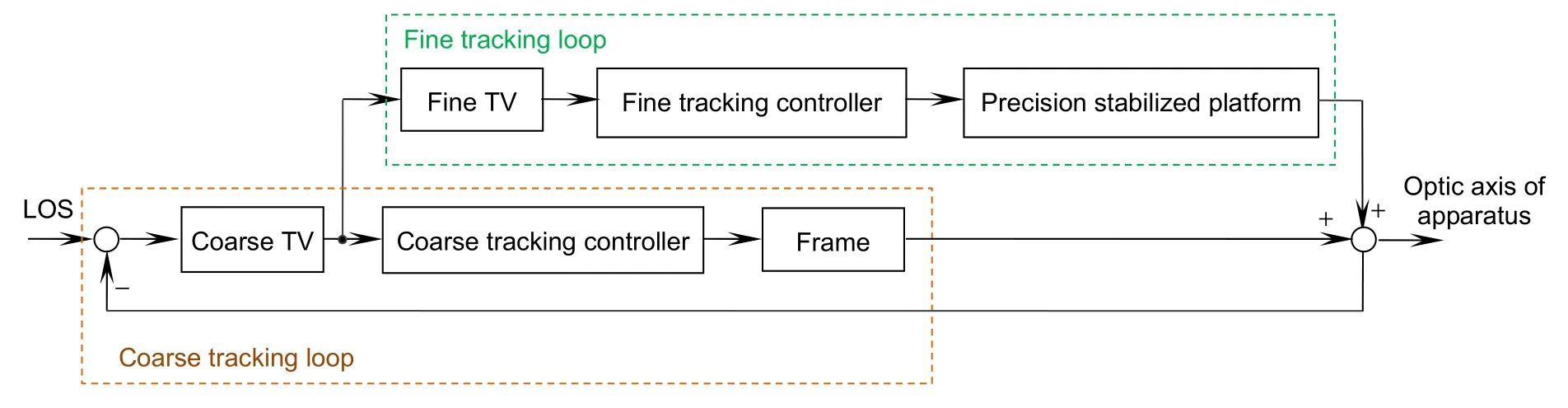
图41 标准的复合轴控制结构 Fig. 41 Structure of standard dual-stage control
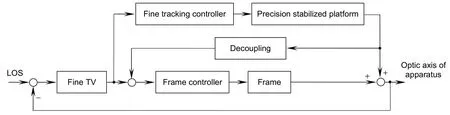
图42 单检测型复合轴控制系统 Fig. 42 Unload structure of dual-stage control
相关的控制理论已经证明[6,22-25]复合轴控制系统的误差抑制能力是粗跟踪和精跟踪误差抑制能力之积,灵敏度函数的带宽主要由精跟踪(子轴)决定,因 此精跟踪控制系统的带宽越高,误差抑制能力越强,复合轴控制系统的稳定性越高。已有的实验证明,精跟踪的闭环带宽应是粗跟踪的闭环带宽六倍以上,最好能达十倍甚至更高,这就要求精度跟踪探测系统具 有很高的采样频率。因此,精跟踪图像探测系统通常设计为小视场、高分辨率,并且采用高帧频的图像传感器。这样既能提高精跟踪控制系统的采样频率,又能提高测量精度,从而提高精跟踪系统带宽以及跟踪精度。
图43、图44展示了三级复合轴控制结构以及实现图[25],该技术在1.2 m量子通信望远镜地面站中成功应用[30]。相比传统双级复合轴跟踪控制系统,跟踪精度由9 μrad提高到3 μrad。复合轴控制是实现高精 度最有效的手段,无论是光电跟踪系统,还是其他高精度定位与跟踪领域,如硬盘定位、光刻、纳米级定位等系统中,要特别关注先进电机和传感器,以及机械结构配置和使用,如基于热膨胀的蜡电机(wax motor)已经由Yabui引入到硬盘跟踪控制系统中,实现了四级复合轴控制[125]。
4 未来的发展方向
图45展示了光电跟踪系统发展层次:
1) 经典的固定基座或者运动平台下光电跟踪控制系统主要解决扰动抑制以及目标跟踪任务,由于受到控制带宽与传感器分辨率的影响,在环境振动以及机动目标条件下跟踪精度有限;
2) 对共孔径以及多通道控制系统建模、子轴快速跟踪系统等相关技术的研究与研制,使得复合轴系统的出现,极大地提高了光电跟踪系统性能。将智能技术与光电跟踪系统相结合,并重点解决平台载荷一体化精密控制技术,可以实现独立的智能光电跟踪系统。在这一层次,光电跟踪系统一般都是独立完成跟踪与测量任务,体积较大、成本较高,受到运载平台限制,降低了可靠性以及时效性;
3) 发展分布式光电跟踪系统不仅可保持单个光电跟踪设备抗干扰性能好、测量精度高及便携性强等优点,还可以克服单个光电跟踪设备测量范围小的不足。在分布式目标跟踪中,将每个光电跟踪器看成一个智能体,则各智能体同时具备测量、通信与计算能力,各智能体与其邻接智能体交互测量和估计信息以提高估计精度;
4) 集群和多机协同跟踪与测量体系将会是未来光电跟踪系统重点发展方向。必须在理论和方法上对运动平台下多光电跟踪系统的协同控制问题进行研究,一方面满足快速准确的跟踪要求,另一方面可以实现多任务的需求。其次,必须重点发展载荷平台一体化精密跟踪技术,一方面发挥平台的优势,实现粗指向,并隔离振动;另一方面建立以惯性空间为参考基准,载荷平台一体化的指向控制。

图43 三级复合轴跟踪系统的结构示意图[25] Fig. 43 Schematic diagram of triple-stage tracking system[25]

图44 三级复合轴系统实物图(不含机架)[30] Fig. 44 Picture of triple-stage control (except gimbal)[30]
多智能协同光电跟踪系统是将多智能体系统与光电系统相结合的产物,是光电跟踪系统智能化的发展目标。多智能体系统起源于上世纪80年代,是由传感器、控制器和执行器通过实时通信网络构成的闭环系统,以实现不同智能体之间的资源共享和协同运作。
近年来,随着通信技术和控制理论的发展,针对多智能体系统的协同控制成为了热门发展方向之一,同时学者们围绕多智能体系统的一致性、编队、定位跟踪等问题开展了一系列卓有成效的研究工作[126-129],如在无人机协同编队和分布式卫星系统组网等方面获得了初步应用。通常来说单个决策者的一致性控制器设计较为简单且可以高效地实现诸多复杂实用的功能,而编队控制问题和协同目标定位与跟踪问题是多智能体系统极具应用前景的两个方面。在编队控制问题中,智能体作为被控对象可以是较为简单的同构智能体,也可能是复杂的异构智能体;目前多智能体系统编队控制研究的趋势是完成更加复杂的任务,同时考虑复杂多变的动态环境。动态目标定位与跟踪技术是测试技术领域研究的前沿方向,而多智能体系统的协同目标定位与跟踪问题在高精度定位领域有着广泛的应用。
光电跟踪控制系统作为动态目标定位与跟踪技术的关键组成部分,在精密测量、航空航天、天文观测和靶场测量等领域有着广泛的应用。近年来由于机动平台的发展,比如车载、高铁、无人机、飞行器等具有机动性强、覆盖范围大的平台,突破了时间与空间的优势。尤其是无人平台的发展,使光电跟踪系统的性能得到更好的发挥。分布式光电跟踪系统不需要融合中心,对通信网络要求较低,同时具有较强的鲁棒性[130-131]。在分布式目标跟踪中,将每个光电跟踪器看成一个智能体,则各智能体同时具备测量、通信与计算能力,各智能体可与其邻接智能体交互测量和估计信息以提高估计精度[130]。

图45 光电跟踪系统发展 Fig. 45 Development hierarchy of optical-electric tracking control system
Zhang等[131]针对异步多光电跟踪设备网络,基于传感器网络中相邻节点测量信息和局部估计信息提出一种异步序贯分布式融合算法,体现了分布式的思想。宋世军等[132]探讨了信息的融合理论分别采用不同方法对光电跟踪系统精度进行拟合,提出基于信息融合的光电跟踪系统高精度控制方法。引入分布式策略可以使得各智能体通过局部信息感知互相协调从而更加快速实现不同任务。同时由于局部信息传递,整个系统的鲁棒性提高,即某个智能体的瘫痪或者局部脱离网络都不会对控制系统造成大的影响。截止目前为止,对于多光电跟踪系统的分布式定位与跟踪问题的研究成果较少。如何在多光电跟踪设备中融入比较成熟的多智能体系统的分布式控制思想也是一个既有趣又充满挑战的问题,对丰富和完善多智能体协同光电跟踪系统的控制理论与方法具有重要意义。
5 结 论
光电跟踪系统性能的提高离不开光机电结构配置、电机驱动、传感器、控制算法以及载荷平台的发展。首先,要实现光电跟踪控制精密控制,必须建立控制模型[133]。没有精确模型就没有精密控制,必须高度重视全系统模型的精确建立,以及提高控制器硬件的处理性能[134]。其次,针对跟踪控制系统的特点,基于合适的传动机构以及传感器,以此为基础发展良好的控制算法是提高跟踪性能是必备的手段。复合轴控制系统仍然是光电跟踪系统提高精度最有效的根本技术,最基本的技术问题是提高精跟踪子轴的跟踪控制性能。为了实现亚微弧度甚至更高跟踪精度,提高子轴的传感器测量精度、采样频率以及更高分辨率的线性执行器是首要条件,扩展子轴的带宽或者增加更小位移的子轴是重要技术手段,采用蜡电机构成,或者嵌入自适应光学技术[135-136]构成多级复合轴系统。提高复合轴控制系统跟踪能力应该特别重视倾斜镜的设计以及高精度控制算法,发展基于观测器控制的高精度控制方法,尤其是仅有误差的控制、非线性控制方法应当重点研究。特别指出,多智能协同光电跟踪系统是光电跟踪领域未来重点发展方向,需要重点研究多智能体系统的协同定位、编队控制以及载荷平台一体化控制技术。
致 谢
值此中国科学院光电技术研究所建所50周年,作者感谢《光电工程》编辑部的邀请促成此文。本文的工作来自中国科学院光束控制重点实验室全体同事以及研究生的辛勤努力,也特别感谢已经退休的前辈对本文工作的支持,感谢审稿人宝贵的建议。
参考文献
[1] Ulich B L. Overview of acquisition, tracking, and pointing system technologies[J].Proceedings of SPIE, 1988, 887: 40-63.
[2] Bigley W J. Supervisory control of electro-optic tracking and pointing[J].Proceedings of SPIE, 1990, 1304: 207-218.
[3] Boroson D M, Robinson B S, Burianek D A,et al. Overview and status of the lunar laser communications demonstration[J].Proceedings of SPIE, 2012, 8264: 82460C.
[4] 李生良, 王毅. 用于精密跟踪的复合轴伺服系统[J]. 光学 精密工程, 1980(2): 50-56.
[5] Ma J G, Yin Y L. The 778 tracking control system[J].Opto-Electronic Engineering, 1986(1): 54-64. 马佳光, 尹义林. 778光电经纬仪跟踪控制系统[J]. 光学工程, 1986(1): 54-64.
[6] Fu C Y, Ma J G, Ye B X,et al. The application research of the composite axis control system[J].Opto-Electronic Engineering, 1998, 25(4): 1-12.
傅承毓, 马佳光, 叶步霞, 等. 复合轴控制系统应用研究[J]. 光电工程, 1998, 25(4): 1-12.
[7] Wang Y, Gao W Z, Wang G W,et al. Dual compound axis servo system of opto-electronic precision tracking[J].Optics and Precision Engineering, 1996, 4(4): 58-61.
王毅, 高伟志, 王贵文, 等. 光电精密跟踪的双重复合轴伺服系统[J]. 光学 精密工程, 1996, 4(4): 58-61.
[8] Wang G M. Review of drive style for astronomical optical telescope[J].Progress in Astronomy, 2007, 25(4): 364-374.
王国民. 天文光学望远镜轴系驱动方式发展概述[J]. 天文学进展, 2007, 25(4): 364-374.
[9] Fujimoto Y, Murakami T, Oboe R. Advanced motion control for next-generation industrial applications[J].IEEE Transactions on Industrial Electronics, 2016, 63(3): 1886-1888.
[10] Sabanovic A. Challenges in motion control systems[J].IEEJ Journal of Industry Applications, 2017, 6(2): 107-116.
[11] Campbell M F, Reese E O. SOAR 4.2-m telescope: evolution of drive and pointing performance from early predictions to final testing[J].Proceedings of SPIE, 2003, 4837: 308-316.
[12] Stepp L M. Advanced technology optical telescopes V[J].Proceedings of SPIE, 1994, 2199: 117-125.
[13] Li G P, Gu B Z, Yang D H,et al. Structure design and analysis of the special mounting and tracking system of the LAMOST[J].Proceedings of SPIE, 2003, 4837: 284-294.
[14] Du F J, Wang D X. The ultra-low speed research on friction drive of large telescope[J].Proceedings of SPIE, 2006, 6274: 627410.
[15] Rao C, Wei K, Zhang X,et al. First observations on the 127-element adaptive optical system for 1.8m telescope[J].Proceedings of SPIE - The International Society for Optical Engineering, 2010, 7654: 76541H.
[16] Fugate R Q, Ruane R E, Ellerbroek B L. Advanced Technology Optical Telescopes V[J].SPIE, 1994: 2-9.
[17] Paris N D.LQG/LTR tilt and tip control for the starfire optical range 3.5-meter telescope's adaptive optics system[M]. Captain, USAF, March 2006.
[18] Kimbrell J E, Greenwald D. AEOS 3.67-m telescope primary mirror active control system[J].Proceedings of SPIE, 1998, 3352: 400-411.
[19] Leonardi F, Venturini M, Vismara A. PM motors for direct driving optical telescope[J].IEEE Industry Applications Magazine, 1996, 2(4): 10-16.
[20] Lewis H.Telescope control systems III[J].Proceedings of SPIE, 1998, 3351: 361-366.
[21] Barnard T W, Fencil C R. Digital laser ranging and tracking using a compound axis servomechanism[J].Applied Optics, 1966, 5(4): 497-505.
[22] Ma J G. The basic technologies of the acquisition, tracking and pointing systems[J].Opto-Electronic Engineering, 1989(3): 1-10. 马佳光. 捕获跟踪与瞄准系统的基本技术问题[J]. 光电工程, 1989(3): 1-10.
[23] Ma J G, Tang T. Review of compound axis servomechanism tracking control technology[J].Infrared and Laser Engineering, 2013, 42(1): 218-227. 马佳光, 唐涛. 复合轴精密跟踪技术的应用与发展[J]. 红外与激光工程, 2013, 42(1): 218-227.
[24] Wang H H, Chen F B, Shou S J,et al. High precision electro-optical tracking system based on fast steering mirror[J].Journal of Applied Optics, 2010, 31(6): 909-913. 王红红, 陈方斌, 寿少峻, 等. 基于FSM的高精度光电复合轴跟踪系统研究[J]. 应用光学, 2010, 31(6): 909-913.
[25] Wang Y Y. Research on high precision LOS stabilization technology based on fast steering mirror[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2016. 汪永阳. 基于快速反射镜的高精度视轴稳定技术研究[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2016.
[26] Zhang S T. Research on large-scale fast-steering-mirror driven by voice coil motor and its line-of-sight stabilization technology[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2019. 张士涛. 音圈式大行程快速反射镜及其视轴稳定技术研究[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2019.
[27] Ren G. An analysis of kinematic relationship for compound-axis structure[J].Opto-Electronic Engineering, 1995, 22(6): 41-46. 任戈. 复合轴结构的运动关系分析[J]. 光电工程, 1995, 22(6): 41-46.
[28] Wu Q Y, Wang Q, Peng Q,et al. Wide bandwidth control of fast-steering mirror driven by voice coil motor[J].Opto-Electronic Engineering, 2004, 31(8): 15-18. 吴琼雁, 王强, 彭起, 等. 音圈电机驱动的快速控制反射镜高带宽控制[J]. 光电工程, 2004, 31(8): 15-18.
[29] 王强. 高性能共轴跟踪系统工程应用研究[D]. 成都: 中国科学院光电技术研究所, 2007.
[30] Qi B, Chen H B, Ren G,et al. ATP technology for 100-kilometer quantum entanglement distribution experiment[J].Optics and Precision Engineering, 2013, 21(6): 1628-1634. 亓波, 陈洪斌, 任戈, 等. 100 km量子纠缠分发实验捕获跟踪技术[J]. 光学 精密工程, 2013, 21(6): 1628-1634.
[31] Liu X F, Ma J G, Liu S F,et al. Effect of declination angle of sight axis on three-axis photoelectric tracking system[J].Opto-Electronic Engineering, 2005, 32(5): 4-8. 刘兴法, 马佳光, 刘顺发, 等. 视轴偏角对三轴光电跟踪系统跟踪过程的影响[J]. 光电工程, 2005, 32(5): 4-8.
[32] Xu Z F, Chen H B, Liu S F,et al. Analysis for pointing error of three-axis photoelectric theodolite with collimation axis eccentricity[J].Opto-Electronic Engineering, 2007, 34(4): 12-16. 徐征峰, 陈洪斌, 刘顺发, 等. 视轴偏心三轴跟踪机架指向精度分析[J]. 光电工程, 2007, 34(4): 12-16.
[33] Tang T, Zhong D J, Bao Q L,et al. Tracking control method of three-axis telescope[P]. 2014-05-28 唐涛, 钟代军, 包启亮, 等. 一种三轴望远镜的跟踪控制方法: CN201210135959.7[P]. 2014-05-28.
[34] Ge Z L, Zhu N H, Zheng Y J. The design of a 3-axis mount without blind area[J].Progress in Astronomy, 2009, 27(2): 183-188. 葛志梁, 朱能鸿, 郑义劲. 三轴无盲区望远镜机架方案[J]. 天文学进展, 2009, 27(2): 183-188.
[35] Hilkert J M. Inertially stabilized platform technology concepts and principles[J].IEEE Control Systems Magazine, 2008, 28(1): 26-46.
[36] Bi Y L. Study on control system of multi-frame photoelectric platform[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2004. 毕永利. 多框架光电平台控制系统研究[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2004.
[37] Jia P, Zhang B. Critical technologies and their development for airborne opto-electronic reconnaissance platforms[J].Optics and Precision Engineering, 2003, 11(1): 82-88. 贾平, 张葆. 航空光电侦察平台关键技术及其发展[J]. 光学 精密工程, 2003, 11(1): 82-88.
[38] Ji M. Multiple-gimbal optical/electronical stabilization system and analysis[J].Journal of Applied Optics, 1994, 15(3): 60-64. 纪明. 多环架光电稳定系统及分析[J]. 应用光学, 1994, 15(3): 60-64.
[39] Shen S. Study on optical axis stability technology of airborne photoelectric platform under broadband vibration condition[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2016. 申帅. 宽频振动条件下航空光电平台视轴稳定技术研究[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2016.
[40] Ye S X, Xie D L, Yang H,et al. Photo-countermeasures technique[J].Opto-Electronic Engineering, 2001, 28(1): 67-72. 叶盛祥, 谢德林, 杨虎, 等. 光电对抗技术[J]. 光电工程, 2001, 28(1): 67-72.
[41] Xia Y X, Bao Q L, Liu Z D. A new disturbance feedforward control method for electro-optical tracking system line-of-sight stabilization on moving platform[J].Sensors, 2018, 18(12): 4350.
[42] Xia Y X. Study on control techniques of inertial stabilization on moving platform[D]. Chengdu: Institute of Optics and Electronics, Chinese Academy of Sciences, 2013. 夏运霞. 运动平台中惯性稳定控制技术研究[D]. 成都: 中国科学院研究生院(光电技术研究所), 2013.
[43] 毛耀. 运动平台光电系统的视轴稳定技术研究[D]. 北京: 中国科学院大学, 2012.
[44] Wei W. The research of optical axis stabilization of the airborne photoelectric platform[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2015. 魏伟. 高精度机载光电平台视轴稳定技术研究[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2015.
[45] Tian J, Yang W S, Peng Z M,et al.Inertial sensor-based multiloop control of fast steering mirror for line of sight stabilization[J].Optical Engineering, 2016, 55(11): 111602.
[46] Bahcall N A. The hubble space telescope[J].Annals of the New York Academy of Sciences, 1986, 470(1): 331-337.
[47] Dunham E, Collins P, Reinacher A,et al.SOFIA image motion compensation[J].Proceedings of SPIE, 2010, 7735: 77355X.
[48] Ruderman M, Iwasaki M, Chen W H. Motion-control techniques of today and tomorrow: a review and discussion of the challenges of controlled motion[J].IEEE Industrial Electronics Magazine, 2020, 14(1): 41-55.
[49] Devasia S, Eleftheriou E, Moheimani S O R. A survey of control issues in nanopositioning[J].IEEE Transactions on Control Systems Technology, 2007, 15(5): 802-823.
[50] Tang T, Niu S X, Ma J G,et al.A review on control methodologies of disturbance rejections in optical telescope[J].Opto-Electronic Advances,2019, 2(10): 190011.
[51] Zhao S, Gao Z Q. An active disturbance rejection based approach to vibration suppression in two-inertia systems[J].Asian Journal of Control, 2013, 15(2): 350-362.
[52] Chen X, Tomizuka M. Overview and new results in disturbance observer based adaptive vibration rejection with application to advanced manufacturing[J].International Journal of Adaptive Control and Signal Processing, 2015, 29(11): 1459-1474.
[53] Hutchinson S, Hager G D, Corke P I. A tutorial on visual servo control[J].IEEE Transactions on Robotics and Automation, 1996, 12(5): 651-670.
[54] Sun X Y, Zhu X J, Wang P Y,et al.A review of robot control with visual servoing[C]//2018 IEEE 8th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), 2018: 116-121.
[55] Tang T, Huang Y M, Zhang T,et al. Reduction of mechanical resonance based on load acceleration feedback for servo system[J].Opto-Electronic Engineering, 2007, 34(7): 14-17. 唐涛, 黄永梅, 张桐, 等. 负载加速度反馈的伺服系统谐振抑制[J]. 光电工程, 2007, 34(7): 14-17.
[56] Qiu X B, Dou L H, Shan D S,et al.Design of active disturbance rejection controller for electro-optical tracking servo system[J].Optics and Precision Engineering, 2010, 18(1): 220-226. 邱晓波, 窦丽华, 单东升, 等. 光电跟踪系统自抗扰伺服控制器的设计[J]. 光学 精密工程, 2010, 18(1): 220-226.
[57] Wang W T, Guo J, Jiang Z H,et al.Study on photoelectric tracking system based on ADRC[J].Infrared and Laser Engineering, 2017, 46(2): 0217003. 王婉婷, 郭劲, 姜振华, 等. 光电跟踪自抗扰控制技术研究[J]. 红外与激光工程, 2017, 46(2): 0217003.
[58] Liu J, Li H W, Deng Y T. Torque ripple minimization of PMSM based on robust ILC via adaptive sliding mode control[J].IEEE Transactions on Power Electronics, 2018, 33(4): 3655-3671.
[59] Tang T, Niu S X, Yang T,et al.Vibration rejection of Tip-Tilt mirror using improved repetitive control[J].Mechanical Systems and Signal Processing, 2019, 116: 432-442.
[60] Tang T, Niu S X, Chen X Q,et al. Disturbance observer-based control of tip-tilt mirror for mitigating telescope vibrations[J].IEEE Transactions on Instrumentation and Measurement, 2019, 68(8): 2785-2791.
[61] Chen W H, Yang J, Guo L,et al. Disturbance-observer-based control and related methods—an overview[J].IEEE Transactions on Industrial Electronics, 2016, 63(2): 1083-1095.
[62] Wu C H, Paul R P. Manipulator compliance based on Joint torque control[C]//1980 19th IEEE Conference on Decision and Control including the Symposium on Adaptive Processes, 1980: 88-94.
[63] Luh J, Fisher W, Paul R. Joint torque control by a direct feedback for industrial robots[J].IEEE Transactions on Automatic Control, 1983, 28(2): 153-161.
[64] De Jager B. Acceleration assisted tracking control[J].IEEE Control Systems Magazine, 2002, 14(5): 20-27.
[65] Younkin G W. Compensating structural dynamics for servo driven industrial machines with acceleration feedback[C]//Conference Record of the 2004 IEEE Industry Applications Conference, 2004. 39th IAS Annual Meeting, 2004.
[66] Han J D, Wang Y C, Tan D L,et al. Acceleration feedback control for direct-drive motor system[C]//2000 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2000), 2000.
[67] Han J A, Qiu Z C, Wang Y C,et al. Discontinuous control for harmonic drive system with the damping enhancement of acceleration feedback[C]//1999 IEEE Canadian Conference on Electrical and Computer Engineering, 1999.
[68] Xu W L, Han J D, Tso S K,et al.Contact transition control via joint acceleration feedback[J].IEEE Transactions on Industrial Electronics, 2000, 47(1): 150-158.
[69] Andersen T, Zurbuchen R. Acceleration feedback applied to the 3.6 m telescope servosystem[R].ESO Technical Report No. 7,1976.
[70] Sedghi B, Bauvir B, Dimmler M. Acceleration feedback control on an AT[J].Proceedings of SPIE, 2008, 7012: 70121Q.
[71] Ren W, Deng C, Mao Y,et al.Virtual velocity loop based on MEMS accelerometers for optical stabilization control system[J].Optical Engineering, 2017, 56(8): 085101.
[72] Choi Y J, Yang K, Chung W K,et al.On the robustness and performance of disturbance observers for second-order systems[J].IEEE Transactions on Automatic Control, 2003, 48(2): 315-320.
[73] Kim B K, Chung W K. Advanced disturbance observer design for mechanical positioning systems[J].IEEE Transactions on Industrial Electronics, 2003, 50(6): 1207-1216.
[74] Shim H, Jo N H. An almost necessary and sufficient condition for robust stability of closed-loop systems with disturbance observer[J].Automatica, 2009, 45(1): 296-299.
[75] Deng C, Tang T, Mao Y,et al. Enhanced disturbance observer based on acceleration measurement for fast steering mirror systems[J].IEEE Photonics Journal, 2017, 9(3): 6802211.
[76] Wang Q, Cai H X, Huang Y M,et al. Acceleration feedback control (AFC) enhanced by disturbance observation and compensation (DOC) for high precision tracking in telescope systems[J].Research in Astronomy and Astrophysics, 2016, 16(8): 51-60.
[77] Tang T, Zhang T, Du J F,et al. Acceleration feedback of a current-following synchronized control algorithm for telescope elevation axis[J].Research in Astronomy and Astrophysics, 2016, 16(11): 7-12.
[78] Tang T, Chen S, Huang X L,et al. Combining load and motor encoders to compensate nonlinear disturbances for high precision tracking control of gear-driven gimbal[J].Sensors, 2018, 18(3): 754.
[79] Kennedy P J, Kennedy R L. Direct versus indirect line of sight (LOS) stabilization [J].IEEE Transactions on Control Systems Technology, 2003, 11(1): 3-15.
[80] Hilkert J M. A comparison of inertial line-of-sight stabilization techniques using mirrors[J]Proceedings of SPIE, 2004, 5430: 13-22.
[81] Hong H J, Wang X W, Weng G F. Mirror stabilization in electro-optical reconnaissance system[J].Journal of Applied Optics, 2011, 32(4): 591-597. 洪华杰, 王学武, 翁干飞. 光电侦察装备中的反射镜稳定技术[J]. 应用光学, 2011, 32(4): 591-597.
[82] Satyarthi S. Optical line-of-sight steering using gimbaled mirrors[J].Proceedings of SPIE,2014, 9076: 90760E.
[83] Hilkert J M, Cohen S. Development of mirror stabilization line-of-sight rate equations for an unconventional sensor-to-gimbal orientation[J].Proceedings of SPIE,2009, 7338: 733803-01-733803-12.
[84] Luniewicz M F, Murphy J, O'Neil E,et al.Testing the inertial pseudo-star reference unit[J].Proceedings of SPIE, 1994, 2221: 638-649.
[85] Algrain M C, Woehrer M K. Determination of attitude jitter in small satellites[J].Proceedings of SPIE, 1996, 2739: 215-228.
[86] Walter R E, Danny H, Donaldson J. Stabilized inertial measurement system (SIMS)[J].Proceedings of SPIE, 2002, 4724: 57-68.
[87] Eckelkamp-Baker D, Sebesta H R. Optical inertial reference unit for kilohertz bandwidth submicroradian optical pointing and jitter control: 20050161578[P]. 2005-07-28.
[88] Hu H J. Line-of-sight stabilization of acquisition, tracking and pointing system on moving bed[D]. Changsha: National University of Defense Technology, 2005. 胡浩军. 运动平台捕获、跟踪与瞄准系统视轴稳定技术研究[D]. 长沙: 国防科学技术大学, 2005.
[89] Mao Y, Ren W, Yu W,et al. Characteristic analysis and robust control design of double-stage precision stabilized platform[J].Sensors and Actuators A: Physical, 2019, 300: 111636.
[90] Tursun M, Eşkinat E. Suppression of vibration using passive receptance method with constrained minimization[J].Shock and Vibration, 2008, 15(6): 639-654.
[91] Thorby D.Structural Dynamics and Vibration in Practice[M]. Amsterdam: Elsevier/Butterworth-Heinemann, 2008: 21-22.
[92] De Marneffe B. Active and passive vibration isolation and damping via shunted transducers[D]. Brussels: Universite Libre de Bruxelles, 2007: 67-69, 112-116.
[93] Lin Z C, Liu K, Zhang W. Inertially stabilized platform for airborne remote sensing using magnetic bearings[J].IEEE/ASME Transactions on Mechatronics, 2016, 21(1): 288-301.
[94] De Marneffe B, Avraam M, Deraemaeker A,et al. Vibration isolation of precision payloads: a six-axis electromagnetic relaxation isolator[J].Journal of Guidance, Control, and Dynamics, 2009, 32(2): 395-401.
[95] Mashayekhi M J, Vahdati N. Application of tuned vibration absorbers in fluid mounts [J].Shock and Vibration, 2009, 16(6): 565-580.
[96] Trankle T, Pedreiro N, Andersen G. Disturbance free payload flight system analysis and simulation methods[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit, 2004.
[97] Dewell L, Pedreiro N, Blaurock C,et al. Precision telescope pointing and spacecraft vibration isolation for the terrestrial planet finder coronagraph[J].Proceedings of SPIE, 2005, 5899: 589902.
[98] Chen C C, Hemmati H, Biswas A,et al. Simplified lasercom system architecture using a disturbance-free platform[J].Proceedings of SPIE, 2006, 6105: 610505.
[99] Pedreiro N, Carrier A, Lorell K,et al. Disturbance-free payload concept demonstration[C]//AIAA Guidance, Navigation, and Conference Control and Exhibit, 2002.
[100] Wang X M. Research on micro-vibration environment simulation and pointing stability technology of the space optical pavload based on six-DOF parallel mechanism[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2019. 王晓明. 基于六维并联机构的空间光学载荷微振动环境模拟及指向稳定技术研究[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2019.
[101] Li W P, Huang H. Integrated optimization of actuator placement and vibration control for piezoelectric adaptive trusses[J].Journal of Sound and Vibration, 2013, 332(7): 17-32.
[102] Zhao H. Study on modeling and simulation of a satellite with a architecture of disturbance free payload in pointing control[D]. Harbin: Harbin Institute of Technology, 2013. 赵浩. 双体卫星在指向控制中的建模与仿真研究[D]. 哈尔滨: 哈尔滨工业大学, 2013.
[103] Du C. Study on dynamic modeling and controlling if a satellite with a architecture of disturbance free payload[D]. Harbin: Harbin Institute of Technology, 2015. 杜超. 一种双体卫星的动力学建模与控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2015.
[104] Yun H, Liu L, Li Q,et al. Investigation on two-stage vibration suppression and precision pointing for space optical payloads[J].Aerospace Science and Technology, 2020, 96: 105543.
[105] Antonello R, Branz F, Sansone F,et al. High precision dual-stage pointing mechanism for miniature satellite laser communication terminals[J].IEEE Transactions on Industrial Electronics, 2020, doi: 10.1109/TIE.2020.2972452.
[106] Kaymak Y, Rojas-Cessa R, Feng J H,et al. A survey on acquisition, tracking, and pointing mechanisms for mobile free-space optical communications[J].IEEE Communications Surveys & Tutorials, 2018, 20(2): 1104-1123.
[107] Talmor A G, Harding Jr H, Chen C C. Two-axis gimbal for air-to-air and air-to-ground laser communications[J].Proceedings of SPIE, 2016, 9739: 97390G.
[108] Wang J L. Study on TV tracking system of O-E theodolite to track and acquire fast moving targets[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2002. 王建立. 光电经纬仪电视跟踪、捕获快速运动目标技术的研究[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2002.
[109] Wang J L, Chen T, Chen J,et al. A method for improving the tracking ability of a photoelectric theodolite against the fast moving targets[J].Opto-Electronic Engineering, 2002, 29(1): 34-37. 王建立, 陈涛, 陈娟, 等. 提高光电经纬仪跟踪快速运动目标能力的一种方法[J]. 光电工程, 2002, 29(1): 34-37.
[110] Wang C. Application research of prediction technology on optoelectronic tracking system[D]. Changchun: Changchun University of Science and Technology, 2013. 王超. 预测技术在光电跟踪系统中的应用研究[D]. 长春: 长春理工大学, 2013.
[111] Huang Y M, Ma J G, Fu C Y. Application of forecast of moving target velocity in electro-optical tracking control system[J].Infrared and Laser Engineering, 2004, 33(5): 477-481. 黄永梅, 马佳光, 付承毓. 目标速度预测在光电跟踪控制系统中的应用[J]. 红外与激光工程, 2004, 33(5): 477-481.
[112] Xu Z Y, Fu C Y, Wang M Y,et al. Accurate prediction for trace of a moving target with fitting function method[J].Opto-Electronic Engineering, 2000, 27(1): 17-19. 徐智勇, 傅承毓, 王满意, 等. 用拟合函数法准确预测运动目标的轨迹[J]. 光电工程, 2000, 27(1): 17-19.
[113] Yang X H. Application research of prediction filtering technology on optoelectronic traget tracking[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2004. 杨秀华. 预测滤波技术在光电目标跟踪中的应用研究[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2004.
[114] Liu T X. The research of compound-axis servo control technique of O-E Tracking system[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2005. 刘廷霞. 光电跟踪系统复合轴伺服控制技术的研究[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2005.
[115] Majhi S, Atherton D P. Modified Smith predictor and controller for processes with time delay[J].IEE Proceedings-Control Theory and Applications, 1999, 146(5): 359-366.
[116] Feliu-Batlle V, Pérez R R, García F J C,et al. Smith predictor based robust fractional order control: application to water distribution in a main irrigation canal pool[J].Journal of Process Control, 2009, 19(3): 506-519.
[117] Ren W, Luo Y, He Q N,et al. Stabilization control of electro-optical tracking system with fiber-optic gyroscope based on modified smith predictor control scheme[J].IEEE Sensors Journal, 2018, 18(19): 8172-8178.
[118] Hurák Z, Řezáč M. Delay compensation in a dual-rate cascade visual servomechanism[C]//49th IEEE Conference on Decision and Control (CDC), 2010.
[119] Zhou X, Mao Y, Zhang C,et al. A comprehensive performance improvement control method by fractional order control[J].IEEE Photonics Journal, 2018, 10(5): 7906811.
[120] Tang T, Cai H X, Huang Y M,et al. Combined line-of-sight error and angular position to generate feedforward control for a charge-coupled device-based tracking loop[J].OpticalEngineering, 2015, 54(10): 105107.
[121] Tao T, Ren G, Ma J G,et al. Compensating for some errors related to time delay in a charge-coupled-device-based fast steering mirror control system using a feedforward loop[J].Optical Engineering, 2010, 49(7): 073005.
[122] Tao T, Tian J, Zhong D J,et al.Combining charge couple devices and rate sensors for the feedforward control system of a charge coupled device tracking loop[J].Sensors, 2016, 16(7): 968.
[123] Tang T, Yang T, Qi B,et al. Error-based feedforward control for a charge-coupled device tracking system[J].IEEE Transactions on Industrial Electronics, 2019, 66(10): 8172-8180.
[124] Ren W, Mao Y, Li Z J,et al.Error-based feedforward control for optoelectronic tracking system[C]//2019 Chinese Automation Congress (CAC), 2019: 460-465.
[125] Atsumi T, Yabui S. Quadruple-stage actuator system for magnetic-head positioning system in hard disk drives[J].IEEE Transactions on Industrial Electronics, 2019, 66(11): 9184-9194.
[126] Olfati-Saber R. Flocking for multi-agent dynamic systems: algorithms and theory[J].IEEE Transactions on Automatic Control, 2006, 51(3): 401-420.
[127] Li T, Zhang J F. Consensus conditions of multi-agent systems with time-varying topologies and stochastic communication noises[J].IEEE Transactions on Automatic Control, 2010, 55(9): 2043-2057.
[128] Tang Y, Gao H J, Zou W,et al.Distributed synchronization in networks of agent systems with nonlinearities and random switchings[J].IEEE Transactions on Cybernetics, 2013, 43(1): 358-370.
[129] You K Y, Xie L H. Network topology and communication data rate for consensusability of discrete-time multi-agent systems[J].IEEE Transactions on Automatic Control, 2011, 56(10): 2262-2275.
[130] Olfati-Saber R. Distributed Kalman filter with embedded consensus filters[C]//Proceedings of the 44th IEEE Conference on Decision and Control, 2006.
[131] Hu J W, Xie L H, Zhang C S. Diffusion Kalman filtering based on covariance intersection[J].IEEE Transactions on Signal Processing, 2012, 60(2): 891-902.
[132] Song S J, Luo J F. High precision control method of photoelectric tracking system based on information fusion[J].Laser Journal, 2019, 40(6): 154-157. 宋世军, 罗锦锋. 基于信息融合的光电跟踪系统高精度控制方法[J]. 激光杂志, 2019, 40(6): 154-157.
[133] Jasperneite J, Sauter T, Wollschlaeger M. Why we need automation models: handling complexity in industry 4.0 and the internet of things[J].IEEE Industrial Electronics Magazine, 2020, 14(1): 29-40.
[134] Monmasson E, Idkhajine L, Naouar M W. FPGA-based controllers[J].IEEE Industrial Electronics Magazine, 2011, 5(1): 14-26.
[135] Jovanovic N, Martinache F, Guyon O,et al. The subaru coronagraphic extreme adaptive optics system: enabling high-contrast imaging on solar-system scales[J].Publications of the Astronomical Society of the Pacific, 2015, 127(955): 890-910.
[136] Rao C H, Gu N T, Zhu L,et al. 1.8-m solar telescope in China: Chinese large solar telescope[J].Journal of Astronomical Telescopes, Instruments, and Systems, 2015, 1(2): 024001.
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:36
航空兵器(2020年5期)2020-12-03 00:55:56
数学物理学报(2019年4期)2019-10-10 02:38:56
黑龙江电力(2017年1期)2017-05-17 04:25:05
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
环境科技(2016年5期)2016-11-10 02:42:12
重庆邮电大学学报(自然科学版)(2016年3期)2016-07-04 06:27:14
电源技术(2015年11期)2015-08-22 08:50:38
应用光学(2015年1期)2015-06-01 03:38:06
系统工程学报(2015年2期)2015-02-28 19:53:43