基于InSAR技术的流域库岸地质灾害监测研究
2020-12-17 13:46:42王国强陈仁琛
中国农村水利水电 2020年12期
王国强,陈仁琛
(1.水利部水利水电规划设计总院,北京 100120;2.国网物资有限公司,北京 100120)
随着社会经济的发展,水利工程发挥着越来越大的作用,然而,在实现水利工程对社会创造经济效益的同时,也必须注意对水库库岸边坡造成的影响,避免发生滑坡、泥石流等地质灾害。这些地质灾害的发生不仅会对水利工程造成破坏,还会严重威胁周边地区人民、移民安置点居民的生命财产安全,造成巨大的社会经济损失[1,2]。作为对这些地质灾害进行监测分析最直接的手段,水库库岸边坡高精度形变监测具有十分重要的意义[3-6]。
目前已有多种方法被联合用于滑坡体形变监测,如测地测量,基于全球定位系统的监测网络,以及遥感图像的解译。尽管这些方法可以获得高精度的形变监测信息,但由于人力和仪器成本的限制,它们不容易获得高密度的测量点。合成孔径雷达(Interferometric Synthetic Aperture Radar, InSAR)技术的出现为库岸边坡形变监测提供了契机,InSAR技术可以大规模地获得地表形变量,精度可达到厘米级,已在地震、火山和采矿变形的监测等多个行业中得到了广泛的应用[8,9],但在水利水电行业还没有得到很好的应用。
本文选取金沙江流域某大型水电站所处的某段流域作为研究区,首先收集7景ALOS PALSAR2数据,基于小基线集技术(Small Baseline Subset, SBAS),对整个研究区的边坡进行形变区域普查;然后对普查获取的形变区安装GNSS设备,进行接触式、不间断形变信息获取;最后基于InSAR技术获取的形变信息与GNSS设备获取的形变信息进行对比分析,以证明基于InSAR技术获取的形变信息的准确性,同时构建“星-地”一体化监测体系,通过全面的信息采集和处理,对水库沿岸的稳定性进行监测,分析库岸边坡的地质灾害分布点与各灾害点区域的形变特性及趋势,为水利枢纽工程的安全运营、航道通航及移民生命财产安全防范提供了全面准确的预警信息。
1 实验区的基本概况
本文试验区选在西南某大型水利枢纽工程,针对该水库库岸边坡的地质灾害问题,进行了地质灾害危险性评估,结合所选数据的覆盖范围,整个评估区的流域长度约为75 km。该流域属于金沙江流域,河谷呈“V”形谷,海拔在2 200~3 500 m之间,垂直高程落差达到1 300 m,属于典型的构造侵蚀高山强烈寒冻风化地貌和大陆性季风高原型气候区,极易产生地质灾害。流域沿岸分布有大量人类聚居区域,移民安置点及道路、桥梁等基础建筑设施,实验区范围及流域位置如图1所示。从图1中可以看出,实验区范围远大于河流范围。这是由于在基于InSAR技术的数据处理过程中,需要在监测区内选择稳定点作为参考点,扩大测区范围能够在确立参考点时有更多选择。
鉴于该区域地质灾害风险点诸多,涉及面广,且水库蓄水处于较高水位运行,若库岸滑坡体整体塌滑入库区或出现崩塌及岩溶塌陷等地质灾害,这都将会对大坝及电站运行带来较大的安全隐患,同时对航道及库岸两边的城镇造成巨大的损害。因此,需对该评估区内的地质灾害点进行形变监测。
2 理论及方法
2.1 数据源简介
本文收集了2018年5月至2019年5月期间的7景ALOS PALSAR2雷达数据(见表1),其工作模式为FBS(fine beam single polarization),L波段(波长23.6 cm),产品级别为Level1.1(单视复数影像数据),HH极化,视角为32.8°,方位向像元大小为2.129 888 m,距离向像元大小为1.430 422 m。
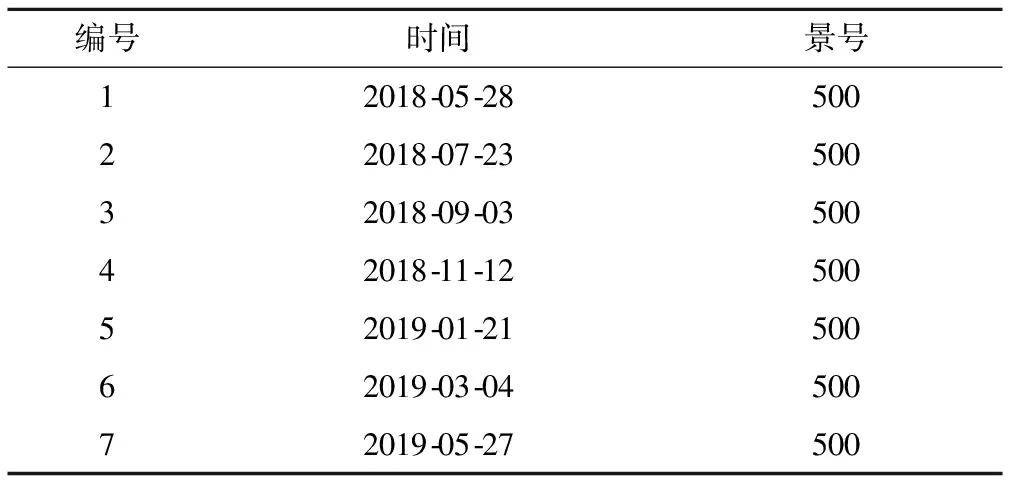
表1 实验区ALOS PALSAR2数据
为了去除地形相位,在进行二轨差分法差分干涉测量时需要利用高精度DEM,本文采用美国地质调查局发布的30 m SRTM DEM数据。
2.2 SBAS-InSAR技术
SBAS-InSAR技术的基本思想是采用多干涉集合组网的方式,通过设置时间和空间基线阈值,组合出短时间和空间基线的干涉对。这样可以尽量保持干涉图的相干性,在提取一定时间基线范围和空间基线范围内具有稳定相干性的分布式点目标时,能够提高相干点密度,适用于自然地表的形变监测。
假设获取了监测区共有N+1幅雷达影像数据,首先选取其中一幅影像作为主影像,将其他N幅影像配准到主影像的影像坐标下。然后设置合适的时间、空间基线阈值,将符合阈值条件的干涉对进行差分干涉,生成M幅差分干涉图,M满足以下条件:
(1)
Berardino等人在2002年提出的SBAS-InSAR算法,对差分干涉图首先进行了解缠,也有很多后续发展的小基线算法利用的是未解缠的干涉图,在选完点目标之后在点目标上进行解缠。这里假设输入的干涉图为解缠后的干涉图[10]。在tA和tB时刻获取的干涉对生成的第j幅干涉图中,任意一个像元的干涉相位可以表示为:
δφj=φtB-φtA≈(φdtB-φdtA)+
(2)
(3)
结合差分干涉原理,上式可写成:
(4)
式中:Δφnonlinear为非线性形变引起的相位差;Δφatm为大气延迟引起的相位差;Δφnoi为噪声引起的相位差。
当公式(4)中Δφnonlinear+Δφatm+Δφnoi的绝对值小于π时进行解缠。解缠后可通过以下公式对时间序列上每个解缠结果的进度进行评价。
(5)
式中:Δωi为残差相位。当评价因子γ小于预先设置的阈值时,将该条边的解缠结果舍弃到三角网的合边。当γ取最大值时,高程误差和形变速率的估计值为最优估计值,将这两个估计值从公式(4)中移除,剩下的残余相位中包括非线性形变相位、大气延迟相位和相干噪声相位。根据非线性形变和大气延迟相位之间不同的特点,可以将二者逐一分离。大气延迟相位在空间维度中表现为相关的低频信息,而在时间维度上表现为随机的高频信息;而非线性形变相位在空间和时间维度中都表现为相关的低频信息。因此,通过时间域高通滤波和空间域低通滤波的方法可以将大气延迟相位分离出来[11]。
当去掉差分相位中的DEM误差和大气延迟相位后,干涉相位可以简化为:
(6)
设相邻时间段内的形变是线性的,即整个时间段内的形变是分段线性的,则第j景干涉图监测的形变相位值可表示为:
(7)
然后将所有的解缠后的差分干涉相位用矩阵形式表示:
Bv=δφ
(8)
式中:矩阵B为一个M×N的矩阵。SBAS-InSAR方法为了防止长时间、空间基线造成的失相干现象,M幅差分干涉图通常存在多个子集,当存在不连续的子集时,矩阵B的秩小于N,即B出现秩亏的现象。为此使用奇异值分解(SVD)方法求出矩阵B的广义逆矩阵,并求得最终的形变速率[12]。
具体的处理流程如图2。
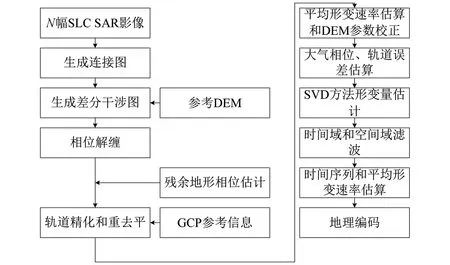
图2 SBAS-InSAR数据处理流程图
3 实验过程及结果验证
3.1 实验过程
因实验区地处我国西南部地区,山高林密,植被覆盖量常年较高,对短波信号的影响较大。L波段对植被冠层的穿透性较高,保证了ALOS-PALSAR 2在该区域的相干性[13-15]。同时,ALOS-PALSAR 2的卫星轨道离差较小,根据实际应用经验来看,有效基线一般保持在300 m以内。但由于本次实验收集的SAR影响数量较少,因此将时间基线阈值设置为365 d,即所有影象两两组合,共计构成21组干涉对,干涉对连接图如图3所示。
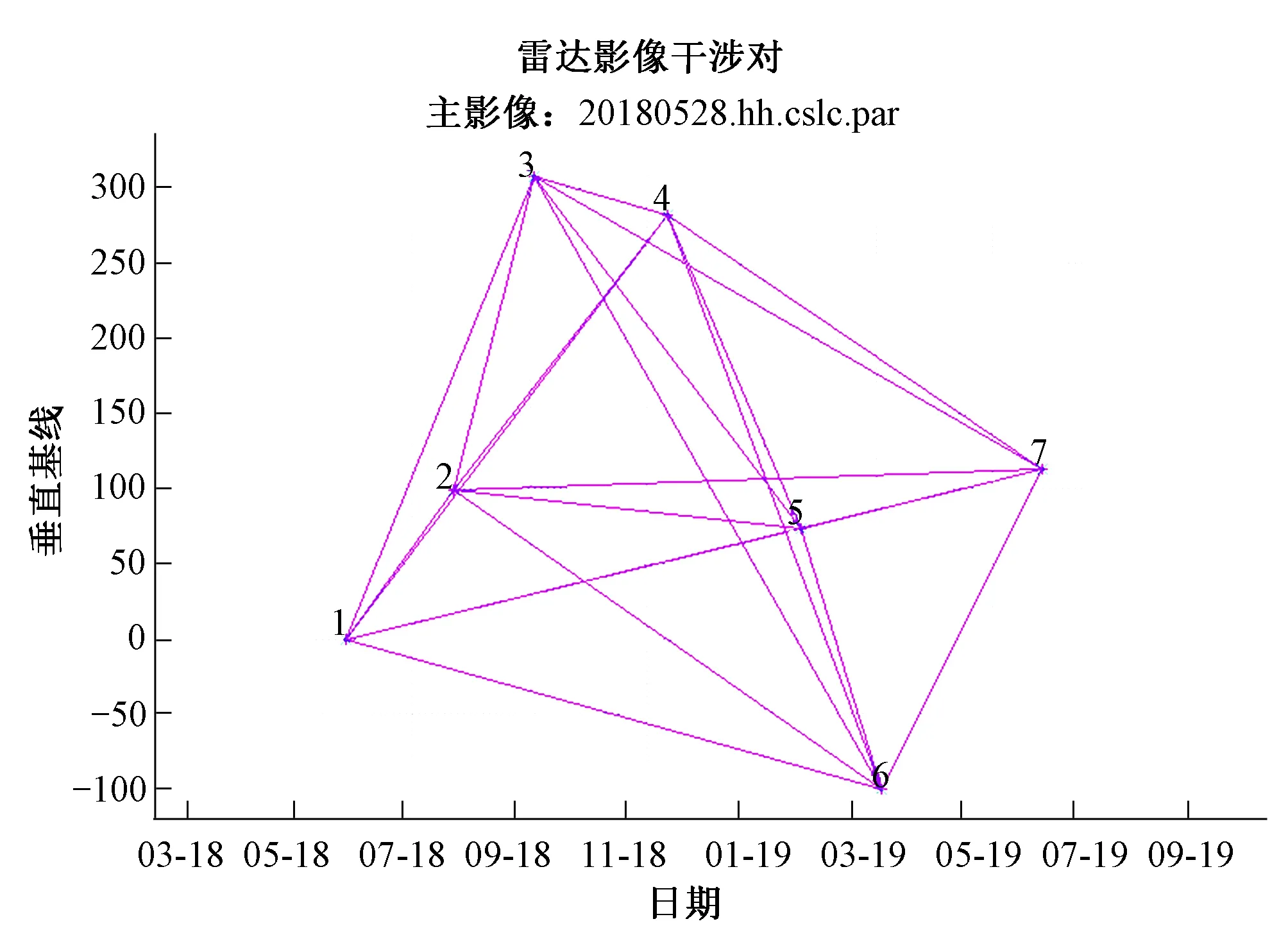
图3 雷达干涉对连接图
为了避免低相干点带来的误差,在差分干涉相位图中对高相干点目标进行选取,将本次相干性阈值设置为0.3。对干涉对进行查分干涉处理、滤波和基于最小费用流的相位解缠,获取到21幅相位解缠图,如图4所示。
图4 相位解缠图集
在SBAS-InSAR时序监测过程中,对残余相位进行时间域上的高通滤波,计算结果中包含有大气相位以及相干噪声。在此基础上,联合所有相干图像元在同一差分干涉图中进行空间域上的低通滤波,以滤除相干噪声,剩余相位即大气相位。经过不断地迭代反演,对地形误差相位、基线误差相位以及大气延迟相位进行改正去除,获取了最终时序形变相位结果,将结果进行相位到形变量的转换,并以第一景影像获取时间为起始形变时间,获取实验区金沙江流域5 km缓冲区内的地表累积形变量图如图5所示。根据实验结果,通过目视解译,共发现3处形变坡体。
3.2 精度验证
选择图5中3号形变区域作为验证坡体,图6展示的为3号形变区域多期形变监测结果。由监测结果显示,3号边坡的主要形变发生在该坡体的东北坡,而西北坡在监测结果上显示为叠掩区域,这是由于SAR影像采用侧视成像的方式,传感器视角接近坡度角是,坡顶与坡底的信号将集中在一起,形成叠掩,而无法获取有效数据。因此,在坡体东北面上共计安装4组GNSS设备,其中1组作为控制基站(图7中基站A),3组作为测量基站(图7中基站B~D)。基站布置及坡体情况如图7所示。
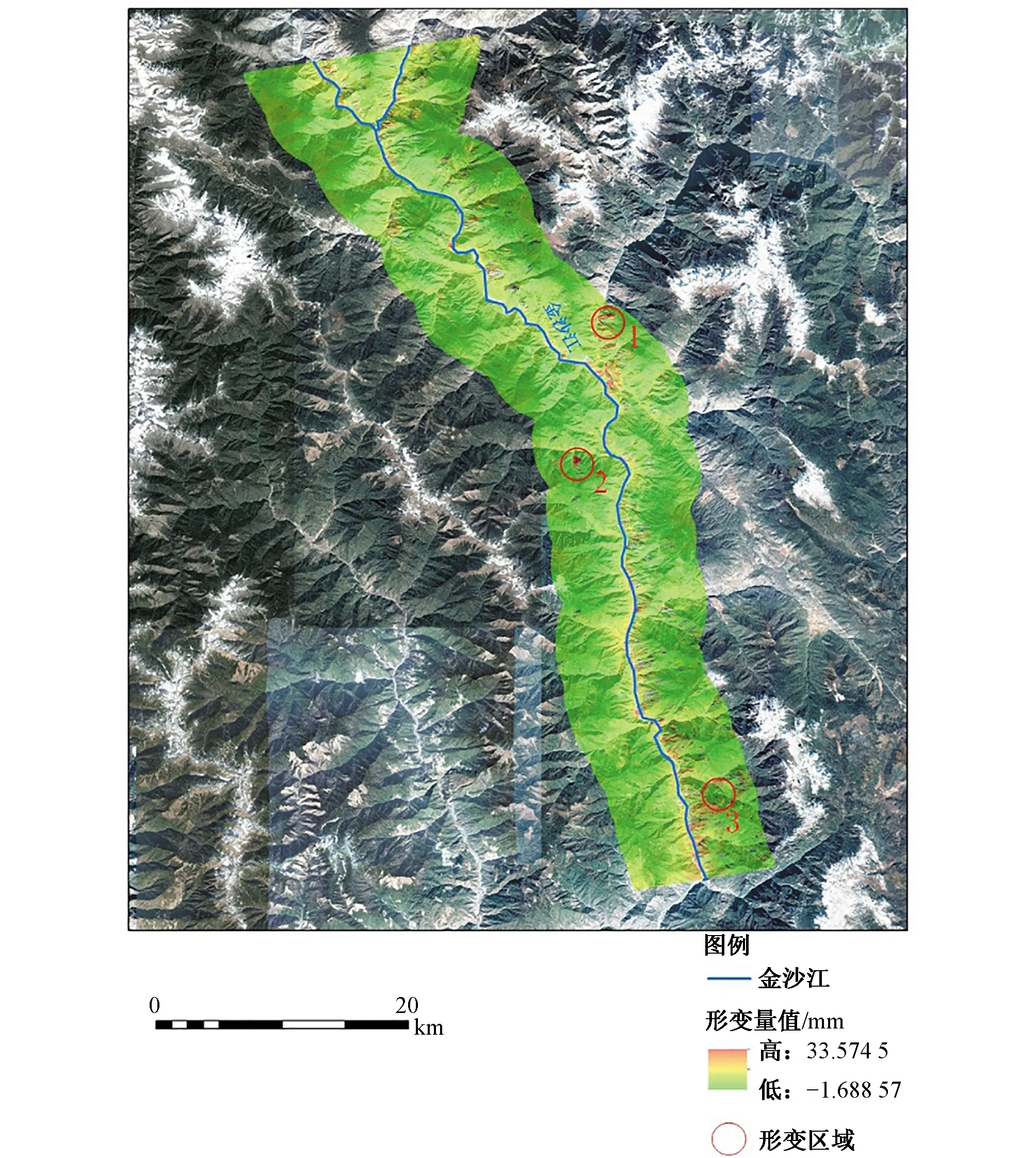
图5 实验区金沙江流域5 km缓冲区地表累积形变量
由于D基站在运行过程中出现故障,我们采集了B和C两个基站在2018年5月28日-2019年5月27日之间竖直方向的累计形变信息,监测频率为每5 d一次。同时,由于InSAR监测获取的形变为视线向(Line of Sight, LOS)的形变,因此,我们将InSAR监测获取的累计形变量投影到竖直方向,与GNSS监测获取的结果进行对比,对比曲线如图8(a)和图8(b)所示。
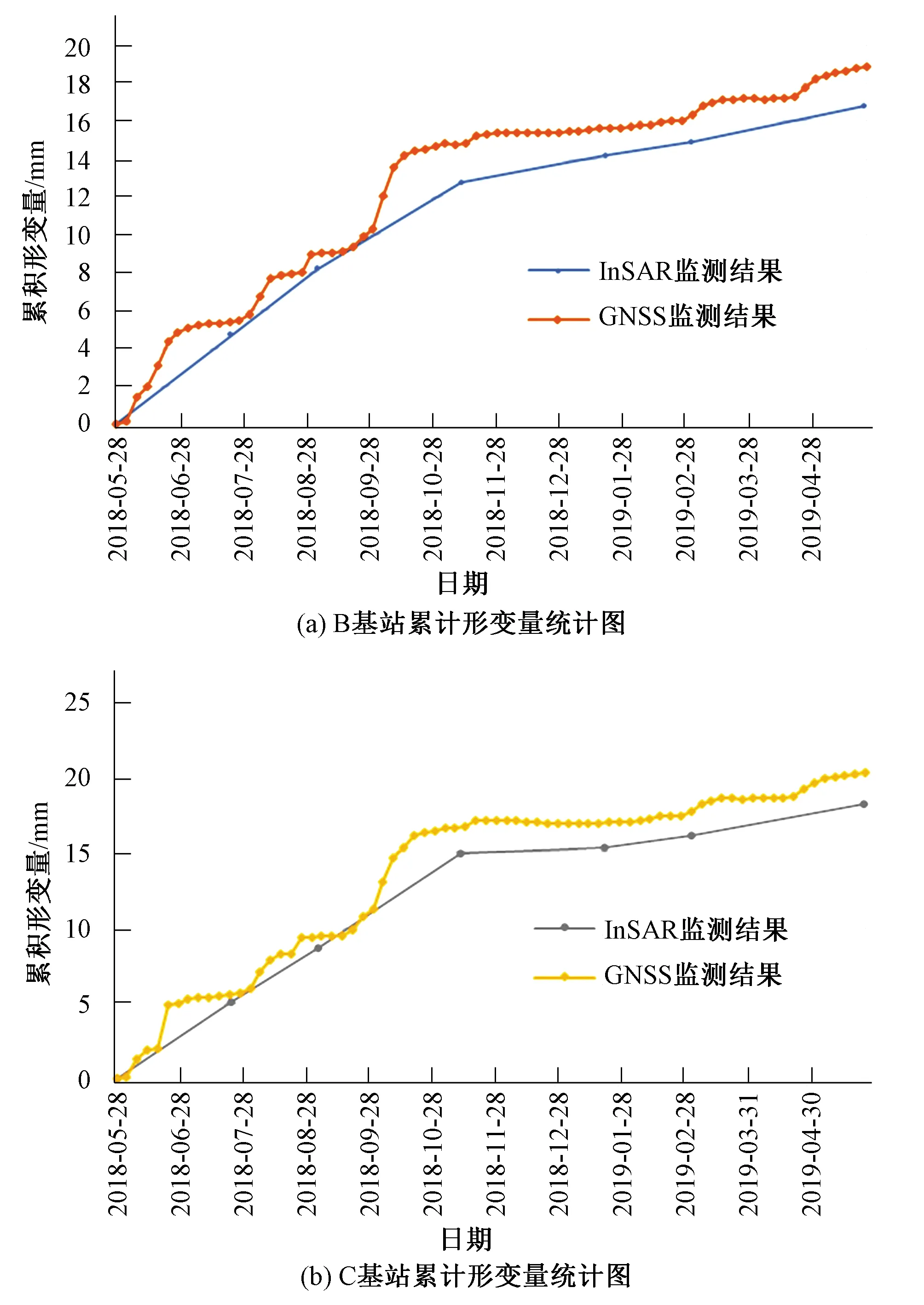
图8 两种监测结果对比统计图
根据两个基站的监测结果可以看出两种监测方式获得的监测结果的变化趋势几乎相同,但GNSS监测获取的形变量要高于InSAR监测获取的形变量。这是由于GNSS获取的是该点在竖直方向上实际的形变量,而InSAR仅能获取该点雷达LOS方向上形变的竖直分量。通过两种监测结果的对比分析,证明了基于L波段雷达影像的星载InSAR能够用于流域边坡的形变普查,同时,结合GNSS监测手段,可以提高边坡监测结果的时间分辨率,提高监测精度。
4 结 语
周期性的对水利工程库岸边坡进行形变监测,积极防治水库沿岸地质灾害的发生,这对保障周边居民生命财产安全和确保水利枢纽正常运行具有重要意义。本文利用星载InSAR技术对实验区进行边坡形变普查,再利用GNSS对普查发现的高危坡体进行重点观测,同时将GNSS的监测数据与InSAR监测结果进行了验证,提高了监测结果的时间分辨率,构建了“星-地”一体化的库岸边坡监测体系。本文提出的监测方案可以解决传统的库岸边坡监测手段难以获取大范围高精度形变监测信息的局限性,保障了库区移民安置居民和水库的运行安全,同时可以大幅降低成本,具有较强的推广应用价值,可以向路桥等行业进行推广应用。
□
猜你喜欢
科教新报(2023年47期)2023-12-02 15:58:53
工程建设与设计(2021年11期)2021-07-28 06:32:54
高技术通讯(2021年3期)2021-06-09 06:57:46
科学(2020年5期)2020-11-26 08:19:14
水利技术监督(2017年6期)2017-12-19 13:28:41
投资北京(2017年1期)2017-02-13 21:09:25
舰船电子对抗(2016年5期)2016-12-13 08:41:14
水利科技与经济(2016年11期)2016-04-22 01:10:36
陕西教育·高教版(2015年4期)2015-06-28 06:09:42
发明与创新·大科技(2015年11期)2015-05-30 07:20:50