
工业机器人双语模块化系统教学研究
2020-12-14 04:01谭华付小全张玉勋刘延星
科教导刊 2020年19期
谭华 付小全 张玉勋 刘延星
摘 要 工业机器人双语模块化系统教学结合特色学院学生科技英语和专业基础知识参差不齐的现象,将“工业机器人”复杂多样的专业知识模块化,使得学生能够依据自身兴趣和基础自主选择学习的侧重点。同时教学改革融入双语学习环境,从而激发学生学习兴趣,提高学习效率和增强自主学习能力。教学改革后期再通过制定系统学习方案扫除学生前期根据自身兴趣和基础选择留下的学习漏洞。
关键词 工业机器人 双语教学 模块化教学 系统教学
中图分类号:G424 文献标识码:A DOI:10.16400/j.cnki.kjdks.2020.07.069
Abstract Systematic teaching on bilingualism and modularization of industrial robot, combining with the phenomenon of more gaps are found in students' scientific English and professional foundation knowledge of characteristic colleges, complex and diverse professional knowledge of industrial robot has been modularized. Students independently choose their learning focuses depend both on the students' interests and bases. The teaching reform blends students in a bilingual learning environment simultaneously, which promoting learning interest, improving learning efficiency and enhancing self-study ability of students. At the end of the teaching reform, systematic learning plan was made to clear the previous remaining holes caused by the choices based on students' interests and bases.
Keywords industrial robot; bilingual teaching; modularized teaching; systematic teaching
0 引言
目前我国基本掌握了工业机器人的轨迹规划和运动学、结构设计和制造、控制系统硬件和软件等技术,形成了工业机器人部分关键元器件的规模化生产能力。焊接、装配、搬运和喷涂等机器人已在多家企业的自动化生产线上获得了规模应用,其中,弧焊机器人也已广泛应用于汽车制造厂的焊装线上。虽说我国在工业机器人研发方面取得了一定进展,但其工程应用水平和技术开发与国际相比差距仍较大。主要体现在:(1)创新能力弱,核心技术和核心关键部件受制于人,尤其是高精度的减速器长期需要进口,缺乏自主研发产品,影响机器人总体产业发展;(2)产业规模小,市场满足率低,相关基础设施服务体系建设明显滞后。中国工业机器人企业虽然形成了自己的部分品牌,但不能与国际知名品牌形成有力竞争;(3)行业归口,产业规划需要进一步明确。因此,融入国际化工业机器人开发大环境,学习行业领先技术,成为培养工业机器人人才的核心要领。[1]
国际化工业机器人人才培养首先要提升学生专业英语能力。从我国英语人才的现状来说,基本都是单一的普通英语人才,同时具备相关专业和技术的英语人才甚少,此种情况对学习国际先进技术及交流带来了极大盲区。而现代企业正处于激烈的市场竞争中,竞争的国际化日趋明显。国内外企业在专业技术交流中,大都带著英语专业人员做翻译,尽管翻译人员外语很熟练,但因不懂技术,涉及到技术细节时便无能为力;而往往这成为技术的核心、谈判的关键,如果把握不当,将会使得企业错失良机、造成经济损失。[2-5]因此,实施工业机器人双语化教学,使学生更好的学习工业机器人国际前沿知识,开拓国际视野,快速有效的吸收国际先进科技与创新理念,为我国培养工业机器人专业国际化人才成为工业机器人教学改革的核心方向之一。[6-10]
其次,传统的“工业机器人”课程主要讲授工业机器人的运动学和动力学,同时涉及到力学、矩阵理论、计算机软硬件等多学科知识,内容繁多。大多数高校在“工业机器人”课程教学过程中采用多媒体教学,这种教学方式虽在一定程度上减轻了授课教师理论推导和公式书写负担,但并没有从本质上解决学生学习“工业机器人”课程的困难:繁琐的数学公式推导、内容抽象的讲解、传统的填鸭式教学;侧重知识传授,忽略自主能力培养,使得学生的学习仅局限于理论推导与设计方法学习,没有注重应用能力和综合分析问题能力的提升,容易造成学生逐渐失去学习兴趣。为解决上述问题,本课程改革在双语的基础上,同时采用模块化系统教学,将传统的理论知识先模块化,分组激发学生学习兴趣;然后系统综合学习。模块化系统教学更贴合特色学院学生水平参差不齐的情况,模块化交流讨论有利于提高学生学习兴趣,好生带动差生,好生相互促进,增强学生的自主学习能力,做到学生自己发现问题,提出问题,解决问题。系统学习又可教学后期扫除学生前期模块化学习留下的漏洞和不足。
1工业机器人双语环境培育
在教改进行前配备了具有精通科技英语的“工业机器人”教师,让老师留足了充裕时间进行教学准备和备课,提升了教师熟练运用科技英语对学生进行通俗易懂教学的能力。课堂上教师通过专业英语及汉语相结合的方式对学生进行面对面授课并交流。同时考虑到学生英语水平参差不齐,首先对学生的科技英语水平进行了调查与初步了解,然后科学合理的排课和分班,防止学生由于英语水平不同而产生的厌学情绪,及学生学习过程中出现的两极分化现象,为课程后期教学排除了隐患。
通过双语教学将学生的专业知识、英语水平进一步强化,相互渗透,促使了学生学习用英语模式思考“工业机器人”专业知识并解决相关问题的能力。
2模块化系统教学
新教学模式将“工业机器人”复杂多样的知识划分为两类模块进行教学,相比之前的传统教学模式对专业教师提出了更高要求。教改过程中教师不仅要熟悉教学新模块,同时要练习对模块进行相互衔接和快速转换的能力。模块化的教学方式有利于学生对复杂知识分散简化学习,使学生能够根据自身情况和个人喜好选择适合自己的模块学习,增强了学习主动性,提高了学生学习兴趣。
针对课程前期的改革研究,学生因为选择模块侧重点不同难免会在学习后期出现知识漏洞,对课程的学习产生不利影响。因此,改革研究后期针对前期可能出现的问题进行了查漏补缺,通过系统化教学,进行归类、整理或加工,使学生从后期系统化学习中一目了然的找到了前期学习遗漏的知识点,通过取长补短,学生更加全面地掌握了“工业机器人”的系统知识。
通过课程模块化及后期的系统教学,使学生更好地理解和吸收专业知识,提高了学生的自主学习能力。
3具体施教环节
3.1 实施方案
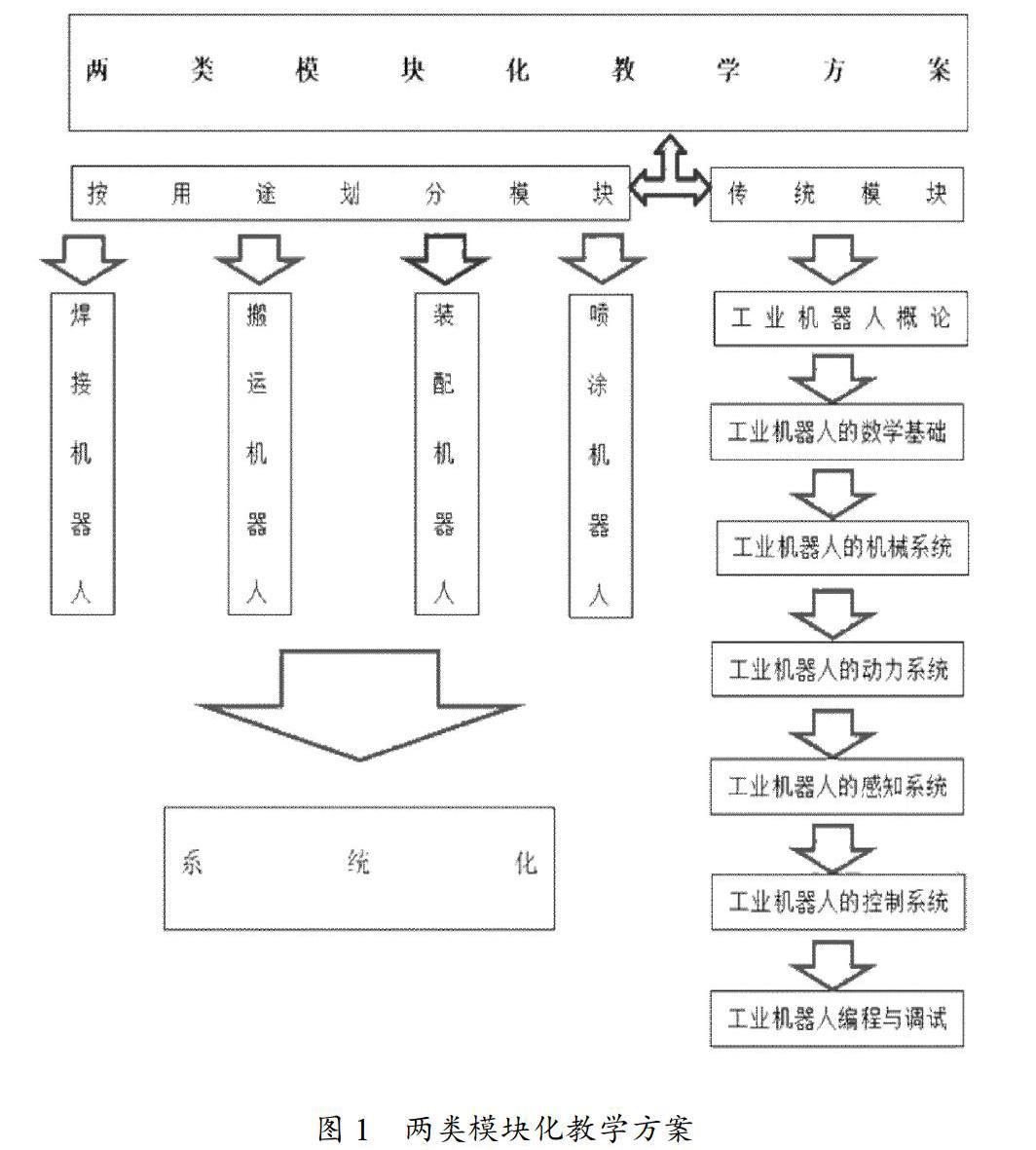
教改过程中先建立了若干个教学改革学科试点班级,优先选用“机械设计制造及其自动化”专业进行试点,初步形成了教学新模式案例。接着通过对案例的比较研究与探索、认真总结与改进,最后形成了以“提高学生学习能力,符合学生学习情况”为特征的高效课堂教学新模式。其中两类模块化教学方案如图1所示。
3.2 实施步骤
3.2.1 筹划准备阶段
(1)成立教改研究小组,以项目团队成员为主力,结合不同学院机械专业教学实际情况,制定了科学合理的教改实施方案;(2)组织了相关专业教师讨论、分析,制定了合理的教学计划大纲;(3)对实施教改的专业学生进行了兴趣问卷调查,根据学生意向和基础进行了分组排課教学。
3.2.2 实施发展阶段
教师提前完成了每节课的备课任务,尽量做到良好处理突发事件。在教师上课期间教改研究小组不定时间进行了教学观摩与考察。在课后教师记录了课堂出现的及以后可能出现的问题,且每半个月进行了一次教学归纳总结。教改研究小组定期查看了教师课堂记录和课程总结,并召开研讨会讨论交流了是否达到预期教学效果,做到了计划与实施同步,实时了解了教师与学生教与学的实际情况。
3.2.3 总结提升阶段
教改研究小组进行了阶段性总结,做出了项目阶段性成果的科学分析与统计,并作了总结报告。总结了已有的经验、反思存在的问题,打造了特色学院“工业机器人”双语模块化系统教学新模式,形成了完善有效的教学管理体系,推动了教学活动的创新发展。同时开设了教师学生研讨会,让广大教师学生畅所欲言。通过教师学生间的交流,探讨了教改的成效及存在的问题,并形成成果,继续推动了特色学院“工业机器人”教学改革向纵深方向发展。
3.3 实施方法
为了适应不同学生的专业基础和英语水平,满足不同层次学生的发展及未来更好的适应社会和国际环境,采用了双语和国际化教学原则,两类模块因材施教,最后系统化查漏补缺,促进了“工业机器人”教学整体优化,构建了科学的、合理的、完善的工业机器人人才培养双语模块化系统教学新模式。
4结论
本改革面向特色学院机械工程系“机械设计制造及其自动化”专业学生,同时可拓展到机械工程学院相关专业。对“工业机器人”高校国际化人才培养展开了全面深入教改研究,所获得的经验和成果可在其他专业课的相关教学改革中全面推广。
参考文献
[1] 李成金.高等院校双语教学探讨[J].锦州师范学院学报(自然科学版),2003.24(04):30-31.
[2] 程仙国,孙慧平,李占涛.《工业机器人技术》课程教学改革与实践[J].宁波工程学院学报,2015.27(04):104-108.
[3] 李庆龄.应用型本科工业机器人课程教学改革的探索与实践[J].中国教育技术装备,2013(21):93-95.
[4] LI Jing, TONG Shu-rong, LIU De-teng. Customer-oriented Configuration Model for Modular Mechatronic Products: Application in Industrial Robot Design[J]. International Journal of Plant Engineering and Management,2013(02):66-73.
[5] 周宇,陈一峰,张晶. 高职院校《工业机器人技术》课程教学改革的探索[J].武汉船舶职业技术学院学报,2012(01):98-100.
[6] 刘福秀,韦荔浦,陈宏. 浅谈《工业机器人运行与维护》课程教学改革[J].当代教育实践与教学研究,2016(10):195.
[7] 高艳玲. 高等院校双语教学存在问题及对策研究[J].北京城市学院学报,2014(04):31-35.
[8] 雷静桃,刘亮,张海洪.“机器人学”课程教学改革与实践[J].实验室研究与探索,2013.32(05):179-182,190.
[9] 王军,耿其东,王福元.工业机器人课程教学改革[J].高校实验室工作研究,2016(04):16-17.
[10] R.Saravanan, S.Ramabalan,C.Balamurugan, A. Subash. Evolutionary Trajectory Planning for an Industrial Robot[J].International Journal of Automation & Computing,2010(02):190-198.
猜你喜欢
科技创新导报(2016年21期)2016-12-17
中国市场(2016年32期)2016-12-06
中小企业管理与科技·上旬刊(2016年11期)2016-11-28
职业(2016年11期)2016-11-23
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年18期)2016-11-03
考试周刊(2016年77期)2016-10-09
大学教育(2016年9期)2016-10-09
科技视界(2016年20期)2016-09-29
企业导报(2016年13期)2016-07-19
