基于GACd的复杂机械产品狭小空间维修操作可行性研究
2020-12-11 11:14朱文敏范秀敏何其昌
计算机集成制造系统 2020年11期
朱文敏,范秀敏,2+,何其昌,2
(1.上海交通大学 机械与动力工程学院 智能制造与信息工程研究所,上海 200240;2.上海市网络化制造与企业信息化重点实验室,上海 200230)
0 引言
在产品设计阶段,必须进行充分的维修性设计、分析、验证和评估,针对可能出现的各种故障提前制定详细的维修方案对拆卸、检测、更换/修复、安装及调试等过程进行描述,才能确保维修操作的迅速、安全和准确[1]。尤其对于飞机、船舶、航天器等集成度较高的复杂机械产品,因为设备结构的制约,维修人员需要经常在狭小的空间内进行手工拆装操作,所以制定维修方案时必须充分考虑周围环境的影响,分析狭小空间内维修操作的可行性,有针对性地支持维修方案设计[2-3]。
维修操作可行性分析问题在国内外已经得到广泛研究,目前采用的方法主要有物理样机法、数字样机法和几何计算法3种。早期设计人员在物理样机上模拟真实产品的维修过程,人工定性分析产品的维修操作空间是否充足,这种方式的准确性、可靠性和自动化程度均较低,而且由于物理样机的研制滞后于产品设计,维修缺陷发现得相对较晚,即使发现了问题,也会因开发周期和成本很难再对已有设计方案进行修改,从而将维修缺陷带入最终产品。随着计算机仿真和虚拟现实(Virtual Reality, VR)技术的快速发展,基于数字样机的虚拟维修(Virtual Maintenance, VM)、虚拟装配(Virtual Assembly, VA)等技术逐渐取代物理样机成为维修性设计分析的主要手段[4-5],其能够在产品成型之前对包括维修操作可行性的各项指标进行分析。另外,还有学者采用几何计算方法对拆装过程的操作可行性进行了分析。因此,针对维修操作可行性分析问题,本文从数字样机法和几何计算法两方面总结目前的研究现状及其存在的不足,特别地,有些研究虽然不以产品维修为对象,但其关键技术可以被推广应用于维修过程,故也在本文考虑的范围之内。
(1)数字样机法 即通过驱动虚拟人体模型完成维修过程仿真来发现维修性设计中的问题,主要利用碰撞检测分析维修操作的可行性。例如Guo等[6]和Geng等[7]根据维修过程仿真中虚拟人、维修工具与周围设备结构间的碰撞干涉情况判断维修操作空间是否足够;Andre等[8]基于虚拟人体手臂的无碰撞操作研究了零件在复杂环境下的可拆卸性问题;顾岩等[9]基于双向快速扩展随机树(bi-directional Rapidly-exploring Random Tree, bi-RRT)算法研究了虚拟人在狭小空间中进行无碰撞装配操作的可行性,然而由于虚拟人体模型的驱动效率较低,上述维修过程仿真需要耗费大量时间,在产品研发周期的约束下,通常只能对部分零部件进行维修过程仿真和维修操作可行性分析,无法全面提高复杂机械产品的维修性[10-11]。为了简化上述过程,Zhou等[12-13]采用扫掠体(Swept Volume, SV)[14]表示维修工具、手部在维修操作中的活动范围,定义了自由扫掠体(free SV)和约束扫掠体(constrained SV),通过自由扫掠体和约束扫掠体的表面积比、体积比来描述操作空间的充足程度,该方法在一定程度上减轻了虚拟手的驱动工作,但是对于狭小空间,仅考虑维修工具和手部是不够的,还需考虑人体其余部位(如人体手臂部分),而且自由扫掠体和约束扫掠体在构建过程中需要较多人工干预,存在工作量大的问题。另外,伍朝晖等[15]建立了面向完整人体的焊接操作姿态空间简化模型,利用碰撞检测判断每一条焊缝的焊接操作空间能否容纳虚拟人简化模型,从而能够快速搜索船舶分段建造中潜在的狭小焊接操作区域,虽然该研究针对的是焊接问题,但是能够将人体操作姿态简化的思想直接应用到维修过程中,该方法只能从整体上分析人体躯干构成区域的操作空间,不适用于分析手臂等局部操作空间。
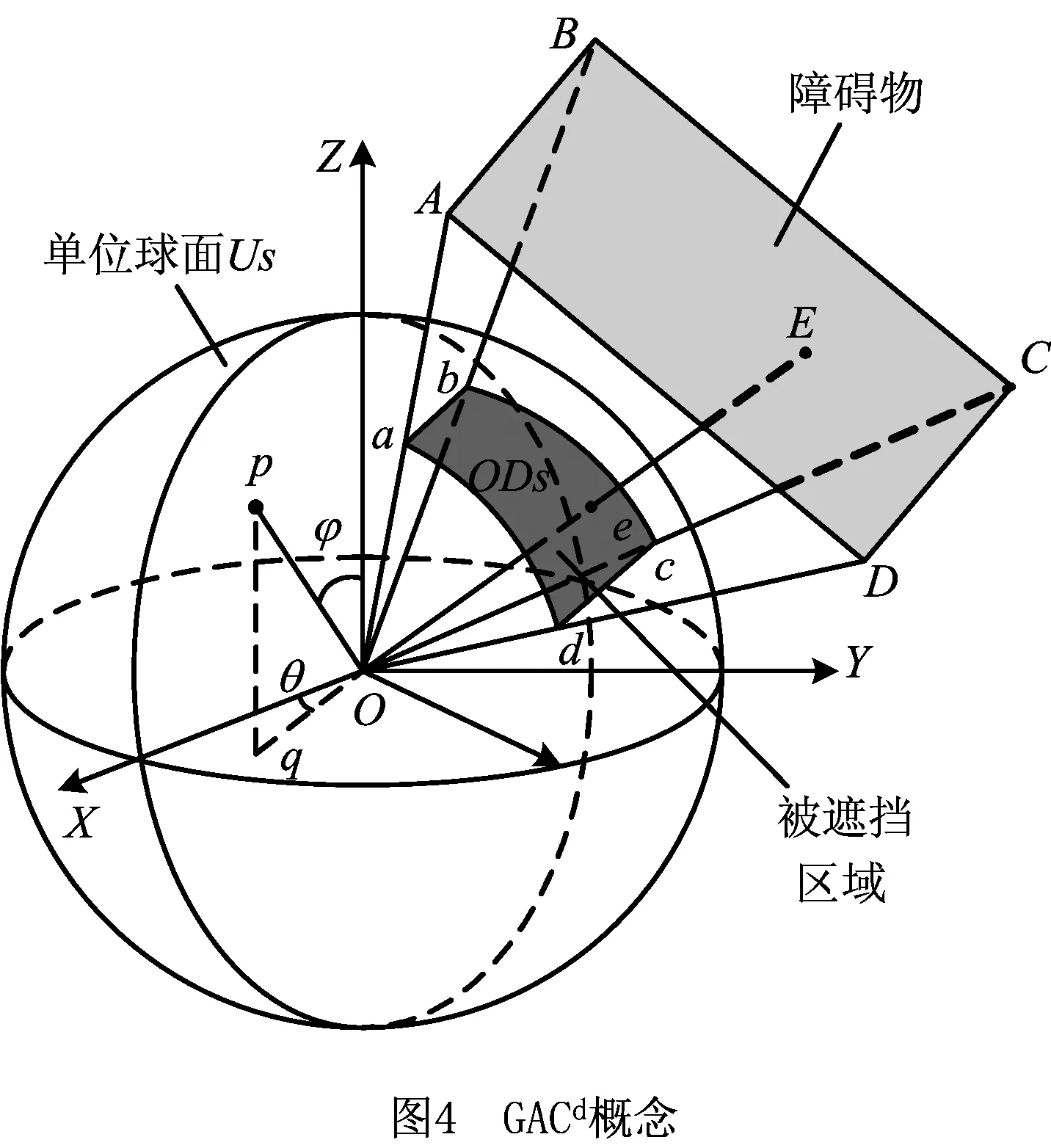
(2)几何计算法 即基于产品、工具等的几何形状信息计算并判断维修操作空间是否充足。例如Wilson[16]通过计算使用装配工具时障碍物(周围设备结构)的构型空间(C-space)来分析工具操作空间,虽然该方法无需进行仿真,但是每个装配工具都要单独计算其相应的构型空间,对于复杂机械产品的狭小空间,因构型空间十分复杂、计算代价过高而难以应用;尹周平等[17-18]讨论了可达性、可接近性、可视性等概念之间的关系,指出可采用基于可视锥的方法进行装配工具可接近性分析,认为使用装配工具装配或拆卸某一零件的前提条件是,该装配工具能够沿着“可视方向”无碰撞地到达目标位置,即装配工具表面上的所有特征必须具备完全可视性,而实际上只要操作空间足够,即使无法完全可视,装配工具也能够无碰撞地到达目标位置。针对可视锥方法的缺陷,Chung等[19-20]提出采用带深度信息全局可接近锥(Global Accessibility Cone with depth, GACd)表示装配操作空间,并基于GACd计算出当前操作空间下可以使用的装配工具集合,该研究只考虑了装配工具自身,虽然在一定情况下可行,但是对于狭小空间中的操作,还必须考虑人体的影响,例如是否有足够的操作空间供人手操控装配工具。
综上所述,现有研究主要集中于周围环境相对开阔下的维修操作可行性分析,针对复杂机械产品狭小空间中的研究存在不足。鉴于此,在已有研究的基础上,本文对狭小空间维修操作可行性分析问题展开研究,首先对该问题进行描述、分析并提出解决思路,然后详细阐述解决思路中关键技术的实现方法,最后结合模拟的航天电子舱维修案例验证本方法的有效性。
1 问题描述及解决思路
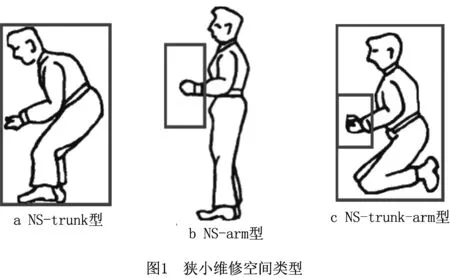
复杂机械产品维修中的狭小空间指由产品设备结构造成的,使人体自由活动受到限制或制约,并导致人体维修活动必须在限定范围内进行的空间。如图1所示,根据对人体各部位活动限制性程度的不同,复杂机械产品维修中的狭小空间主要分为3类[21-23],即以人体躯干活动受限为主的狭小空间(NS-trunk)、以手臂(包括手部)活动受限为主的狭小空间(NS-arm),以及以人体躯干、手臂活动同时受限为主的狭小空间(NS-trunk-arm)。从设计的角度来看,为了使复杂机械产品具有良好的维修性,应充分合理地设计其设备布置方案和结构形式来避免产生狭小空间,然而在狭小空间中进行维修操作通常无法避免,主要有两方面原因:①复杂机械产品中包括大量仪器设备和零部件,由于受体积和重量的限制,复杂机械产品内部空间十分紧凑和狭小;②复杂机械产品的日常周期性维护和应急维修通常为原位维修(onsite maintenance)[24-25],即维修人员直接在复杂机械产品内部进行维修操作,不必将维修对象从产品内部转移至空旷位置,由此产生狭小空间维修的情况。
通常,维修人员通过其手臂操控工具完成维修操作,人体其余部位可认为静止不动。因此,对于NS-trunk型狭小空间,可采用文献[15]中人体操作姿态简化的方法来分析操作空间是否充足;对于NS-arm型和NS-trunk-arm型狭小空间,在应用人体操作姿态简化方法的基础上,需进一步研究手臂部分操作的可行性。从已有文献资料来看,对狭小空间中人体手臂操作的可行性研究存在不足,例如维修过程仿真中手臂部分的驱动过程较繁琐,几何计算方法中目前以维修工具的研究为主,未考虑人体手臂的影响,然而手臂部分极易与周围设备结构发生干涉,对维修操作可行性分析至关重要[8]。因此,本文主要解决的问题是:针对复杂机械产品狭小空间内的手持工具维修操作过程,对维修操作可行性分析问题展开研究,重点分析人体手臂部分是否具有足够操作空间。本文在已有GACd研究的基础上,考虑采用手持工具进行维修操作这一因素,针对维修工具和人体手臂分别构建相应的GACd进行操作可行性分析,该方法主要包括3个环节:①构建维修工具与人体手臂操作简化模型;②构建面向维修工具与人体手臂的GACd;③基于构建的GACd分析维修工具与人体手臂的维修操作可行性。
2 维修工具与人体手臂操作简化模型的构建
2.1 维修工具操作简化模型
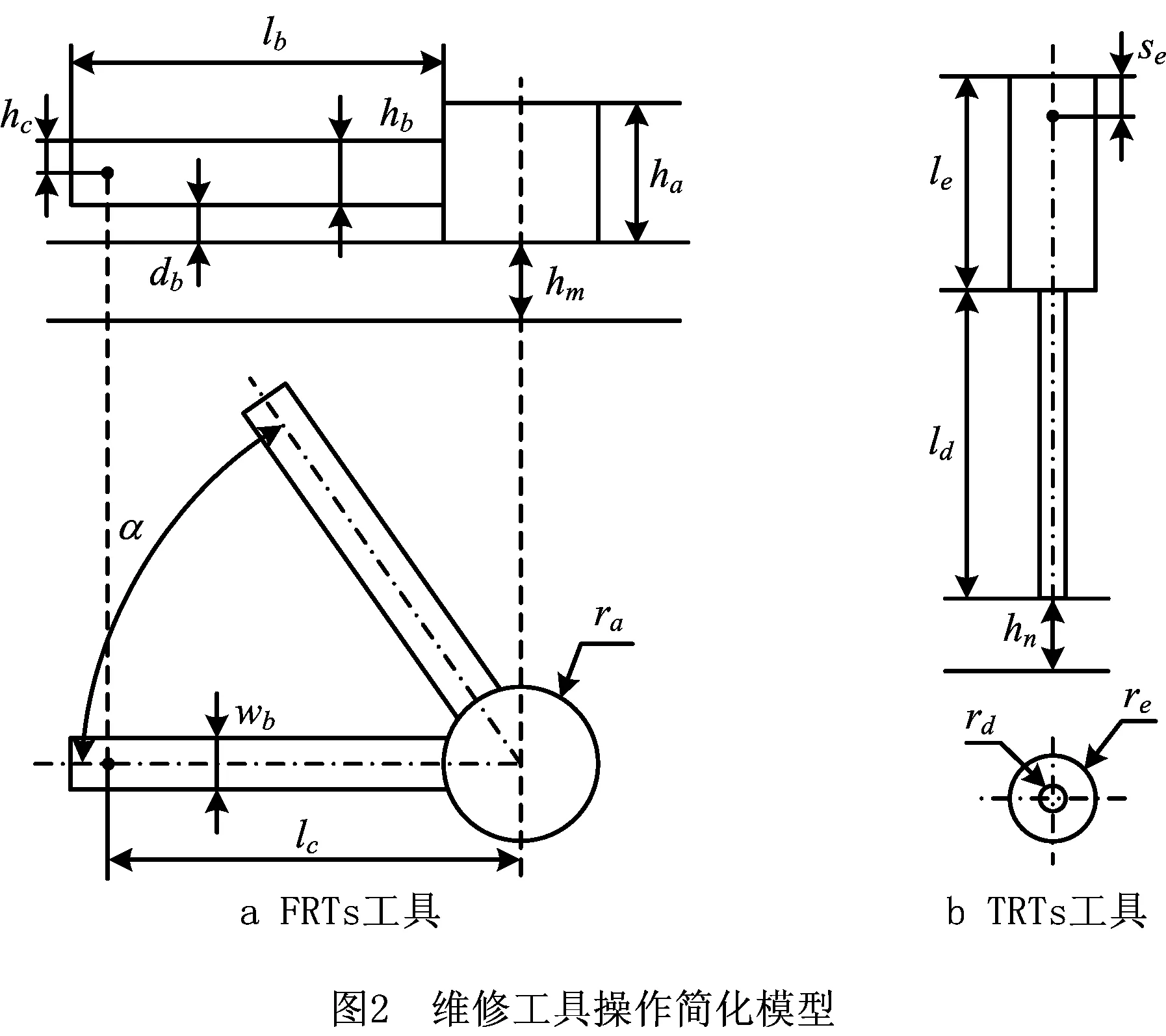
本文研究重点在于狭小空间内的手持工具维修操作过程,其中最常用的维修工具按照操作特性分为两种[20],即绕工具轴型(Tool-axis Rotation Tools, TRTs)和绕紧固件轴型(Fastener-axis Rotation Tools, FRTs)。TRTs工具(如螺丝刀等)在使用过程中绕其自身轴线旋转,可以看作只沿紧固件轴线方向移动,因此这类工具需要的操作空间只与其几何尺寸和轴向移动距离有关;FRTs工具(如扳手等)在操作过程中必须绕紧固件轴线旋转一定角度,因此需要的操作空间除与工具自身的几何尺寸和移动距离有关外,还与其旋转角度有关。基于上述因素,对这两种操作特性不同的维修工具分别建立操作简化模型,为了分析手臂操作的可行性,必须考虑手部在维修工具上的抓取位置和抓取手势。受作业习惯的影响,不同维修人员的抓取位置和抓取手势不完全一致,为了便于分析计算,本文参照常见的抓取位置[10,26],在维修工具操作简化模型中定义抓取参考点来对维修人员的抓取位置进行限定,对于抓取手势则采用手部操作简化模型代替(见2.2节)。维修工具操作简化模型及其主要参数如图2所示。图中:ha为工具头高度;ra为工具头半径;lb为手柄长度;wb为手柄宽度;hb为手柄高度;db为手柄与工具头端面距离;lc为抓取参考点与工具头轴线距离;hc为抓取参考点与手柄端面距离;α为工具旋转角度;hm为轴向移动距离;ld为工具头长度;rd为工具头半径;le为手柄长度;re为手柄半径;se为抓取参考点与手柄端面距离;hn为轴向移动距离。
2.2 人体手臂操作简化模型
人体手臂主要由手部、前臂、上臂3部分构成,各部分在维修过程中均应有足够的操作空间,然而由于它们之间的相对运动关系复杂,能够形成各种各样的手臂姿态,而且手部具有极高的灵活性,能以多种抓取手势来操控维修工具,这些都增加了操作可行性分析的难度。为了提高求解效率并便于实际应用,本文对所分析的问题进行如下简化:将人体手臂需要的操作空间分为两部分考虑;对于手部,不考虑具体的抓取手势,将其看作是维修工具的延伸部分,其操作空间由手部的简化形状及所操控工具的操作特性、抓取位置、移动距离决定;对于前臂和上臂,操作空间由操作通道代替,即将问题转化为分析狭小空间内是否存在操作通道,使手臂能够从外部空间到达内部操作区域。基于以上分析,对于手部,在操控FRTs工具时需要的操作空间可简化为扇型体,操控TRTs工具时需要的操作空间可简化为圆柱体。本文以上述扇型体和圆柱体为手部的操作简化模型,对于前臂和上臂部分,参考国标[22]提出的开口尺寸确定原则,以前臂和上臂的直径和长度为基础并考虑一定裕量,构建圆柱体来代表人体手臂能进入的最小空间,并以此作为前臂和上臂的操作简化模型,当狭小空间能容纳该操作简化模型时认为存在操作通道。人体手臂操作简化模型、主要参数及其计算方法如图3和表1所示,各具体尺寸根据国标[23]中的推荐值确定。图中:ws为手部简化形状的长度;hs为手部简化形状的高度;wt为手部简化形状的宽度;ht为手部简化形状的长度;A1为手臂开口直径;B1为手臂开口深度;γA为手臂可接近角度。


表1 人体手臂操作简化模型的参数计算方法
3 带深度信息的全局可接近性锥GACd的构建
3.1 GACd概念

3.2 GACd的构建
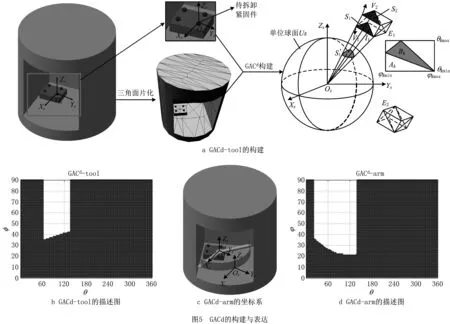
针对维修工具与人体手臂的操作可行性分析,本文构建两种GACd,即GACd-tool和GACd-arm,两者构建过程类似,只是选取的原点不同,前者的原点位于紧固件上,后者的原点位于维修工具上。本文采用文献[19-20]中的三角面片投影法构建GACd,并通过面片筛选对其进行优化以提高计算效率。以待拆卸紧固件的GACd-tool构建为例对本方法进行说明,具体过程如下:

步骤2筛除无用的三角面片。依次对集合T中的三角面片Sk进行如下筛选判断:
(1)区域筛选 拆卸紧固件时,维修工具位于坐标系OsXsYsZs的正半空间,只用考虑位于正半空间的零部件对维修工具的影响,无需考虑负半空间中的零部件,因此筛除位于负半空间中的三角面片,如实体E2中包含的三角面片。相应地,单位球面上的离散点及方向也只考虑位于正半空间中的,记为ADs′(91×360)。


步骤4计算Os点与三角面片Sk之间的深度信息。从ADs′(91×360)中依次取出符合边界范围Ak要求的方向Dp(φki,θki),计算经过Os点并以Dp(φki,θki)为方向的直线Lki与三角面片Sk所在平面的交点Iki,若交点Iki在三角面片Sk内,则Dp(φki,θki)为Os点的不可接近方向,计算Iki点与Os点间的距离Dki(如OsI1),即为Os点与三角面片Sk在Dp(φki,θki)方向上的深度信息R(φki,θki)。
步骤5完成GACd构建并存储深度信息。利用上述方法对所有三角面片Sk进行处理,得到Os点在坐标系OsXsYsZs正半空间的所有不可接近方向和深度信息。其中,若直线Lki与多个三角面片相交,即Os点在一个方向上可计算出多个距离Dki,则以其中最小的距离Dki作为该方向上的深度信息。在ADs′(91×360)中除去不可接近方向后,得到Os点在正半空间中的所有可接近方向,记可接近方向上的深度信息为0,表示无穷大。最后,按顺序以各方向的φ值为行、θ值为列构建矩阵,对深度信息进行存储。
按照上述步骤,得到待拆卸紧固件的GACd-tool,为了获得直观的显示,基于深度信息构建GACd-tool的二维描述图,如图5b所示,图中以φ和θ为横纵坐标,深色区域表示Os点的不可接近方向,浅色区域表示Os点的可接近方向。类似地,在分析手臂的操作可行性时(如图5c),基于维修工具的抓取参考点构建GACd-arm(具体过程见4.2节),相应的GACd-arm描述如图5d所示。
4 维修操作可行性分析
本文首先分析维修工具的操作可行性,若操作空间能够满足维修工具的使用要求,则继续分析手臂的操作可行性,只有通过这两个过程的验证,才能确保维修操作是可行的,否则需要从设计角度调整维修方案,以确保操作空间充足。
4.1 维修工具的操作可行性
对于维修工具的操作可行性分析,首先在待拆卸紧固件处建立直角坐标系OsXsYsZs并构建GACd-tool,然后利用维修工具操作简化模型与GACd-tool进行比较计算,确定是否有足够的操作空间。
对于FRTs工具,需采用不同的方法分析工具头和手柄部分,如图6a所示,工具头所需的操作空间与工具头几何尺寸和轴向移动距离hm有关,其中移动距离等于紧固件长度lf,因此可将操作空间简化成半径为ra、高为(ha+lf)的圆柱体,从GACd-tool中提取相应的深度信息与该圆柱体所占空间进行比较,若满足式(1)则表明工具头具有充足的操作空间。手柄部分所需的操作空间与手柄几何尺寸、旋转角度和轴向移动距离有关,通常FRTs工具需要连续旋转60°以上,即α≥60°。因此,以旋转起始角度θr1=0开始搜索,若存在旋转终止角度θt1(θt1≤(θr1+2π))使得维修工具在旋转区间[θr1,θt1]((θt1-θr1)≥Δθmin)内满足式(2),则认为手柄部分有充足的操作空间,其中Δθmin为维修工具的最小使用角度,即在考虑工具手柄的宽度后,工具正常使用时所需要旋转的最小角度。另外,对于如图6b所示的TRTs工具,采用其中工具头部分的计算方法分析操作可行性。
∀θ∈[0,2π];
{R(φ,θ)·tan(φ)>(ha+lf),0≤φ≤φ0;
R(φ,θ)·sin(φ)>ra,φ0<φ≤π/2}。
(1)
∀θ∈[θr1,θt1]((θt1-θr1)≥Δθmin);
{R(φ,θ)·cos(φ)>(hb+db+lf)||
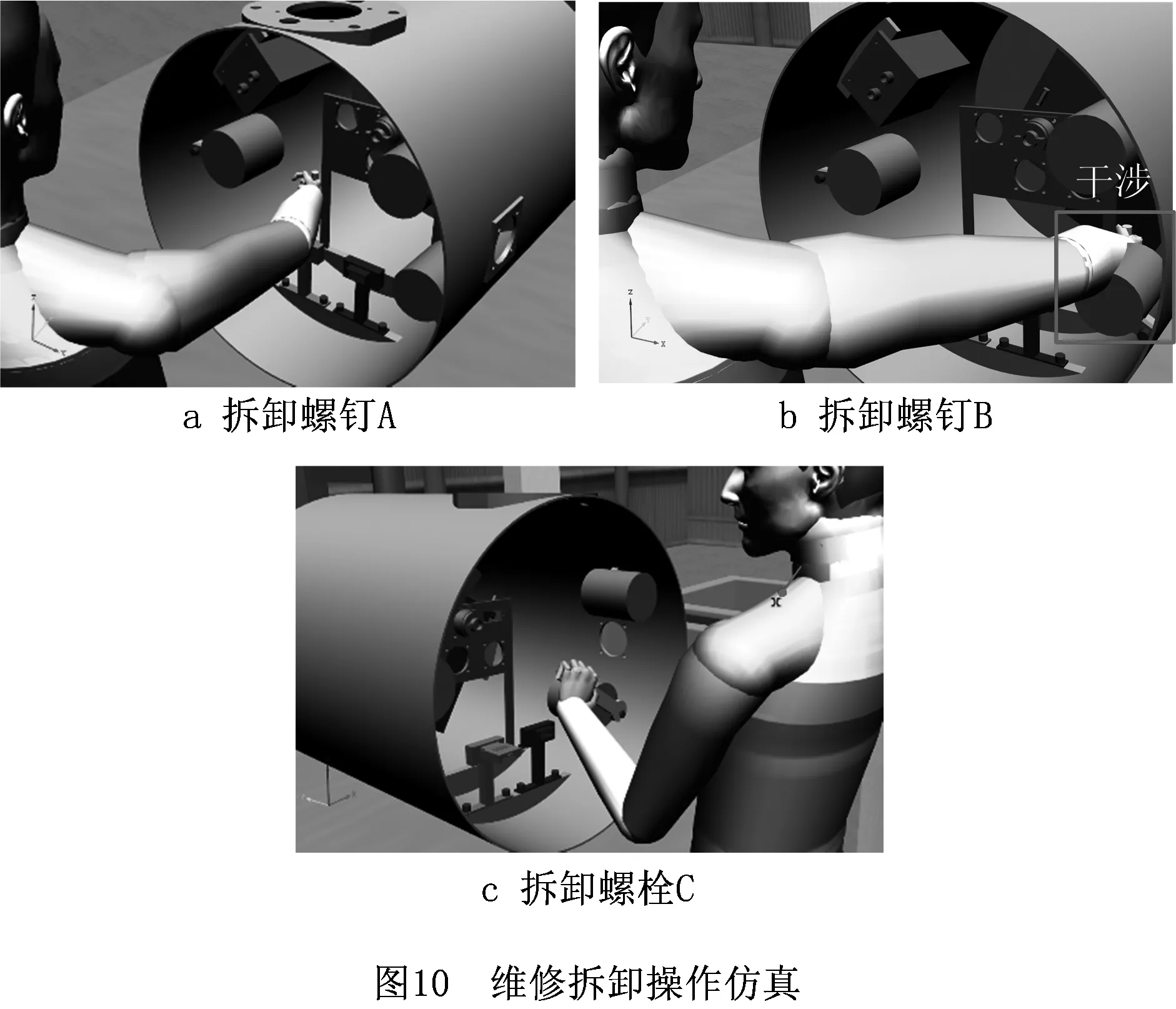
R(φ,θ)·sin(φ) R(φ,θ)·sin(φ)>(lb+ra)|| R(φ,θ)·cos(φ) (2) 手臂的操作可行性分析分为手部及其余部位(前臂、上臂)两部分进行。 (3) 基于原点Ot坐标构建转换矩阵Ttrans,将OsXsYsZs坐标系下的手部扇形体转换到坐标系OtXtYtZt中,与维修工具类似,从GACd-arm中提取深度信息,与坐标系OtXtYtZt下手部扇形体所占的空间进行比较,搜索满足手部操作空间要求的旋转范围[θr2,θt2],当旋转范围大于最小使用角度,即(θt2-θr2)≥Δθmin时,表明手部的操作空间充足,具体过程如式(4)和式(5)所示。 ∀H∈[0,hs+lf]&L∈[lc-ws/2, lc+ws/2]&β∈[θr2,θt2]; {xs=Lcos(β),ys=Lsin(β),zs=db+hb+H; Ttrans=[1 0 0 0;0 1 0 0;0 0 1 0; -xO-yO-zO1]; (xtytzt1)=(xsyszs1)·Ttrans; φst=cos-1(zt/dt),θst=solve(xt,yt); R(φst,θst)>dt}。 (4) solve(x,y)= (5) 如图7b所示,在分析前臂和上臂的操作可行性时,将手臂操作简化模型置于坐标系OtXtYtZt中,对于手臂操作简化模型中的区域A,GACd-arm对应范围内的所有方向都应是Ot点的可接近方向,而对于操作简化模型中的区域B,从原点Ot到简化模型边界的距离(如Otm)应小于GACd-arm中对应方向上的深度信息。基于以上特点,首先按式(6)在GACd-arm中进行遍历搜索(令γ=γA),判断是否存在范围内方向深度信息均为0(代表可接近方向)的连续区域Cr,其中Dp(φa,θa)为该区域的中心,代表手臂操作简化模型轴线的方向。若存在这样的区域,则表明手臂操作简化模型中区域A的操作空间足够,否则说明操作空间不足。 ∀φa∈[0,π/2]&θa∈[θr1,θt1]; {xa=(cos2(γ)-cos2(φa))/(cos(γ)·sin(φa)); za=(cos(γ)-xa×sin(φa))/cos(φa); θscope=tan-1(ya/xa); ∀φ∈[φa-γ,φa+γ]&θ∈[θa-θscope, θa+θscope]; {x′=sin(φ)·cos(θ),y′=sin(φ)·sin(θ), z′=cos(φ); if(x′sin(φ)+z′cos(φ)≥cos(γ)); R(φ,θ)=0}}。 (6) ∀t∈[0,π/2-φa]; {dr=A1/(2×sin(γ+t)); ∀k∈[0,2γ+2t]; {xtk=sin(φa-γ-t+k)×cos(γ+t)/ cos(γ+t-k); ztk=(dr·cos(γ+t)-xtk×sin(φa))/cos(φa); φtk=cos-1(ztk/dr),θtk=solve(xtk,ytk); R(φtk,θtk)>dr}}。 (7) 另外,对于TRTs工具,以轴向移动距离hn=0时的抓取参考点为原点构建GACd-arm,将其与手部操作简化模型的圆柱体所占空间进行比较,其余分析过程与FRTs工具类似。 为了衡量维修时人体手臂操作空间的充足程度,定义充裕度指数Ac, (8) 式中γmax为可在GACd-arm中计算出的满足式(6)和式(7)条件的最大手臂可接近角度。若γmax<γA,则表明该GACd-arm对应的狭小空间无法容纳人体手臂操作简化模型,即人体手臂的操作空间不充足,反之则存在,而且γmax越大,说明人体手臂的操作空间越充足,维修操作越容易,维修效率越高。 在虚拟工程仿真平台(Virtual Engineering Simulation Platform, VESP[28])的基础上,利用MATLAB对本文方法进行编程实现。如图8所示,以模拟的航天电子舱中设备C的维修拆卸为例,对本文方法进行验证,本次验证的计算环境为:计算机操作系统Windows 7,Pentium(R)Dual为Core E6500 CPU、8 G内存,MATLAB 7.0。 首先,在VESP中完成模拟的航天电子舱三维模型管理、三角面片生成及维修工具定义,将电子舱三角面片和待选用维修工具的几何信息用txt格式存储以供MATLAB程序调用;然后,基于本文所提方法,利用上述几何信息在MATLAB中完成GACd构建及维修操作可行性分析,具体结果如表2所示。对于设备C,必须先拆卸掉螺钉A和螺钉B,因此分别构建螺钉A和螺钉B的GACd-tool及GACd-arm,通过与维修工具和人体手臂操作简化模型计算比较,可得螺钉A的拆卸过程具备操作可行性(如图9a,Ac=1.2),而螺钉B不具备拆卸可行性(Ac=0.6),主要原因在于拆卸螺钉B时手臂的操作空间不足,这也可通过图9b中GACd-arm描述图左上方区域的可接近方向范围(空白区域)较少来反映。 考虑先移除设备E2,为螺钉B的拆卸提供操作空间。首先分析设备E2上螺栓C的拆卸操作可行性,如图9c所示,螺栓C的GACd-arm中的可接近方向范围很大(空白区域多),计算可得其具备拆卸操作可行性(工具可旋转角度为102°,Ac=3.7);然后,在移除设备E2的情况下重新构建螺钉B的GACd-tool和GACd-arm并进行分析,如图9d所示,在移除设备E2后,GACd-arm中的可接近方向范围得到扩大,计算后可知此时螺钉B的拆卸也具备了操作可行性(Ac由0.6提高到1.5);最后,通过上述分析得到的维修拆卸方案是先移除设备E2再拆卸设备C。 为了证实本文所提方法的正确性,在VESP中对上述过程进行维修拆卸仿真与分析。如图10所示,所选用的维修工具均有足够的操作空间,即维修工具在工作时不会与周围零部件发生干涉。加入虚拟人后发现,螺钉A具备拆卸可行性但是操作空间较小,人体手臂很容易和周围零部件发生干涉,需要多次调整手臂姿态才能到达操作位置;拆卸螺钉B时人体手臂无法避免与设备E2发生干涉,在移除设备E2后螺钉B才具有拆卸可行性;螺栓C有拆卸可行性,而且人体手臂有充足的拆卸操作空间。通过与前述结果对比发现,仿真方法与本文采用的几何计算方法所得结果一致,然而一个完整的仿真过程包括场景初始化、工具调入、工具定位、虚拟人姿态调整、抓取手势调整、碰撞检测等过程,需要较多人为干预,因此需要耗费较长时间,而本文方法具有较高的自动化程度,能够在保证分析结果正确的同时有效提高工作效率,如表2所示。 表2 实验分析计算结果 针对复杂机械产品狭小空间维修操作可行性分析中存在的问题,本文在已有GACd研究的基础上,考虑手持工具进行维修操作这一因素,针对维修工具与人体手臂分别构建相应的GACd进行操作可行性分析。通过维修拆卸模拟的航天电子舱案例表明,本方法可以正确、快速地对维修操作可行性进行评价,能有效提高维修方案规划的效率,对于狭小空间中的手持工具维修操作过程具有较好的应用前景。为了进一步提高维修方案设计的效率,未来研究将扩大GACd的应用范围,考虑将人因工程学与GACd结合,利用GACd分析和计算维修操作中的人因工程学指标(如可达性、可视性等),并进一步在设计阶段对维修便捷性和维修效率进行分析与评估。

4.2 手臂的操作可行性


5 实例验证



6 结束语
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31图学学报(2021年2期)2021-05-13今日农业(2020年14期)2020-12-14中国煤炭工业(2019年5期)2019-11-04幸福家庭(2016年3期)2016-04-05中国医疗美容(2015年1期)2015-07-12少儿科学周刊·少年版(2015年4期)2015-07-07中华皮肤科杂志(2014年4期)2014-12-19饮食科学(2014年10期)2014-10-29中国药业(2014年21期)2014-05-26