
基于特征标记的遥感建筑图像分类方法研究
2020-12-02 06:55:18文政颖王佳欣
河南工程学院学报(自然科学版) 2020年4期
文政颖,王佳欣
(河南工程学院 计算机学院,河南 郑州 451191)
随着遥感探测技术的发展,可采用远程遥感探测技术进行地面建筑图像的探测和识别,建立远程遥感建筑图像的特征提取和信息监测模型,通过图像处理技术进行遥感建筑图像的特征提取和分类识别,以提高遥感建筑图像的特征辨识和自动化信息分类识别能力[1]。遥感建筑图像分类识别技术研究在地理信息空间规划、城市规划设计和地物探测等领域具有很高的应用价值,相关方法的研究受到了人们的极大关注。
对遥感建筑图像的分类识别研究建立在对图像特征提取的基础上,结合模糊特征匹配模型,进行遥感建筑图像的关键特征点标注,根据特征标注结果结合模糊分类识别算法实现对遥感建筑图像的特征分类。对遥感建筑图像的传统分类方法主要有模糊PID分类法、神经网络分类法和基于超分辨率(Super-Resolution,SR)重建的分类法等[2-3]。文献[4]提出了基于主成分特征提取的建筑遥感图像分类方法,采用大气散射特征点匹配方法进行遥感建筑图像的细化滤波处理,结合主成分特征提取方法进行建筑图像分类识别,提高了分类的准确性,但计算复杂度较高,图像分类的精度不高。文献[5]提出了基于机器学习的遥感建筑图像特征分类方法,使用亮度分量进行遥感建筑图像特征细节透射分析,对提取的图像细节特征采用多尺度机器学习方法进行分类,但该方法的自适应迭代能力不好。针对上述问题,本研究提出了基于特征标记的遥感建筑图像分类方法。首先进行遥感建筑图像采集,然后对采集的图像进行特征提取,根据特征提取结果进行特征标记,实现遥感建筑图像的优化分类识别,最后进行仿真分析,验证了本方法在提高遥感建筑图像分类识别能力方面的优越性能。
1 遥感建筑图像采集和模糊信息融合处理
1.1 遥感建筑图像采集
为了实现遥感建筑图像的优化分类和特征识别,首先需要在大气散射环境下进行遥感建筑图像的模糊信息融合处理,采用遥感成像传感器进行地面建筑图像的特征监测,对不同成像传感器识别到的图像信息进行融合处理[6],再结合模糊特征识别方法进行遥感建筑图像的模糊度特征检测和识别,得到遥感建筑图像的采样轮廓波形为
(1)

(2)

(3)
式中:Eint(vi)表示训练样本的初始灰度值;Eext(vi)表示扩展灰度值;N表示遥感图像的训练样本数。根据剩余显著部分图像的最大灰度值进行遥感建筑图像的像素特征提取,得到遥感建筑图像的边缘轮廓特征分量,再根据显著图检测方法进行图像细节特征提取[8],得到建筑图像的细节特征分布为
(4)
式中:a表示形态分离的维度。根据建筑图像细节特征的采集结果进行模糊度辨识和特征分类,可提高图像的显著特征检测能力。
1.2 遥感建筑图像的模糊信息融合
结合分块模板特征匹配方法进行遥感图像的特征配准处理,根据特征配准结果进行建筑物的特征点提取,在大气散射环境下进行遥感建筑图像的模糊特征检测和识别[9]。根据图像的细节、清晰度、色彩恒定性,得到遥感图像的像素生成序列
c1={i|i∈S},c2={{i,i′}|i′∈Ni,i∈S},C=c1∪c2,
(5)
式中:i=1,2,…,T;S表示单幅图像的列数;Ni表示单幅图像的行数;c1表示多尺度分解的高频系数;c2表示多尺度分解的低频系数;C表示遥感建筑图像像素的空间位置分布特性。采用模糊度信息融合方法,建立遥感建筑局部区域像素亮度检测模型:
(6)

基于显著图的背景抑制方法进行建筑图像的分类识别[10],再根据次级显著图分布进行图像信息融合,得到遥感建筑图像融合的判决统计特征量为

(7)
式中:δ为遥感建筑图像的暗度区域分布特征量。建立遥感建筑图像特征细节识别模型,根据特征配准结果进行建筑物的特征点提取,结合特征标记方法进行遥感建筑图像的平移、旋转、比例不变性等相关性特征检测[11],得到检测输出的灰度直方图模型为
(8)
(9)

2 遥感建筑图像特征分类
2.1 遥感建筑图像的特征提取
结合分块模板特征匹配方法进行遥感建筑图像的特征配准处理,再根据特征配准结果进行建筑物的特征点提取。本研究提出基于特征标记的遥感建筑图像分类方法,采用机器学习方法进行遥感建筑图像提取过程中的自动寻优,用max 函数提取分离出来的前景图进行遥感建筑图像的局部模糊特征检测,得到特征点为K(x0,y0)。以K(x0,y0)为中心,得到类间方差取得最大值时的阈值为

(10)
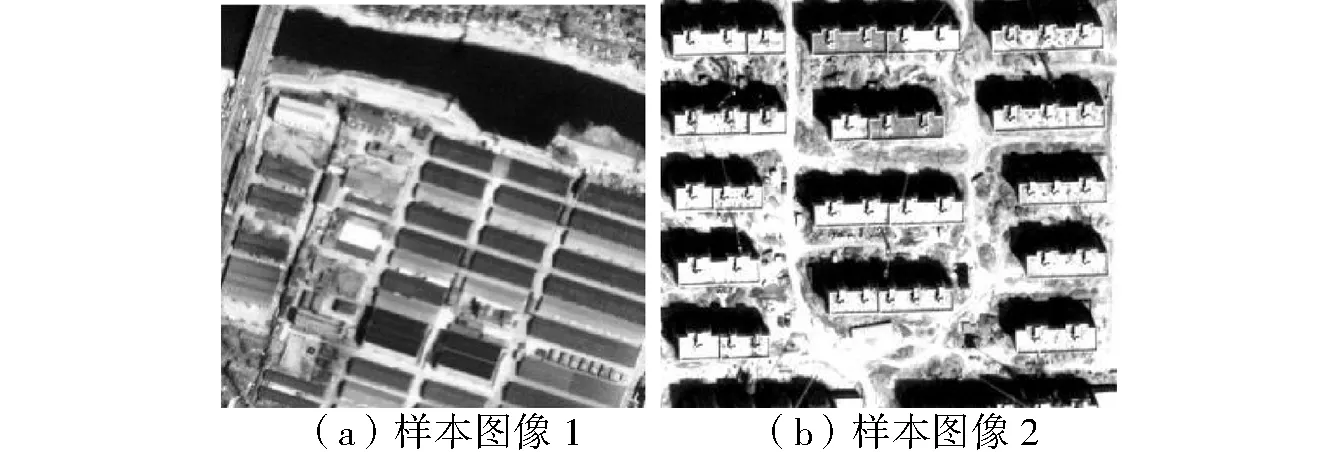
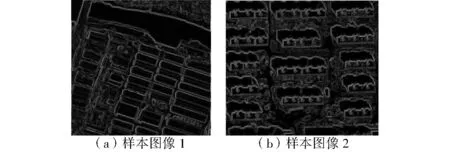
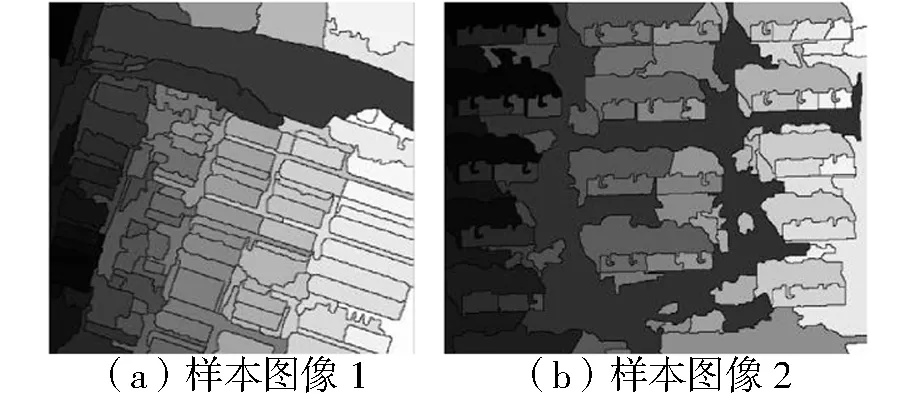
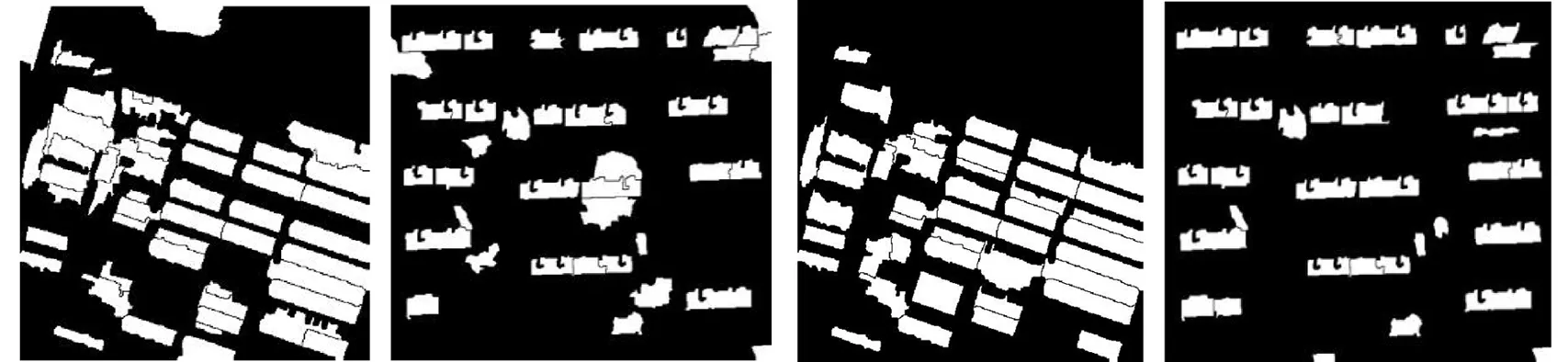
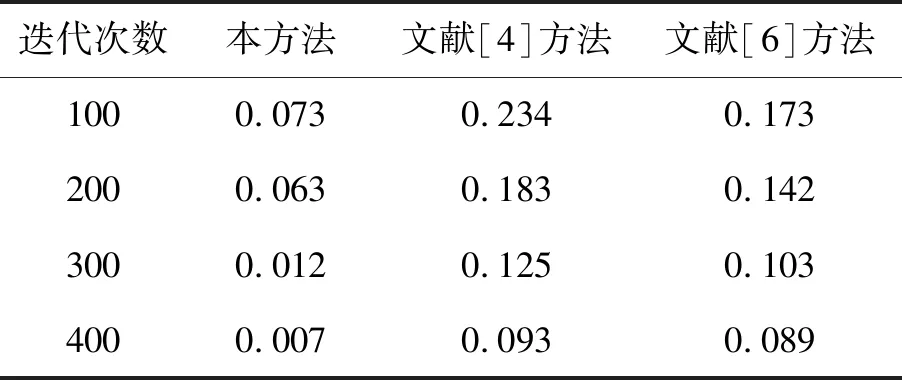
式中:R为标准测试误差系数;K为输入的特征量。如果pixel_A bnrβ(X)=RβX-RβX1, (11) 式中:Rβ表示形态学闭运算。构建图像总平均灰度值估计模型,获得遥感建筑图像的视觉信息特征检测结果[12],得到边缘轮廓特征为 (12) 式中:xi为每一个细致区域的输入特征量;xj为遥感建筑图像的边界区域像素。构造遥感建筑图像的相似度特征分辨模型,图像总平均灰度为 (13) (14) 对不同纹理分布的遥感建筑图像进行边缘轮廓特征检测,根据边缘特征标记结果,得到遥感建筑图像特征的细节点分布模型为 (15) 式中:η表示遥感建筑图像的边缘亮度;φ表示前景和背景的初始聚类中心参数;R表示遥感建筑图像的模板匹配系数;D表示灰度概率密度函数设定K均值聚类的初始聚类特征量。将图像分为目标与背景两类,得到遥感建筑图像特征分类集合为 Team(z)=arg max(ykz+ek),k=1,2,…,R, (16) 式中:ek表示形状误差;yk表示遥感监测的强度;z为遥感图像分类的聚类中心。采用机器自适应学习的方法,得到图像的L灰度级为 ikl(z)=bml(gklz+fkl), (17) 式中:l=1,2,…,R,并且k≠l。建立遥感建筑图像特征分布集,对n个对象构成的集合进行自适应分类,得到相似度特征量为 (18) 式中:ycm表示c维数据构成;ydm表示d维数据构成。根据相似度特征提取结果,对不同纹理分布的遥感建筑图像进行边缘轮廓特征检测,再根据边缘特征标记结果实现遥感建筑图像的优化分类。 为了测试本方法在遥感建筑图像分类中的应用性能,进行仿真实验分析。使用MSRA的10 K遥感监测数据集作为测试集,设定目标区域的建筑物数量为2 000,数量集越多,分类统计分析的精度越高。在遥感图像空间分辨率为 1 M的情况下,遥感图像的帧大小为 4 000×4 000,通过形态学分布计算得到遥感图像监测的结构相似度系数为0.65,建筑物每个块的权重值为0.25。权重系数的大小决定图像分类聚类中心的偏移度,权系数越大,偏移度越小,建筑边缘轮廓单次测量的误差为0.002 6,遥感建筑图像采集的像素强度为200×200。根据上述仿真参数设定进行遥感建筑图像分类识别,得到的检测图像如图1所示。 以图1为研究对象,采用自适应参数融合方法进行遥感建筑图像的多模态特征分解,对不同纹理分布的遥感建筑图像进行边缘轮廓特征检测,结果如图2所示。 图1 待分类的遥感建筑图像Fig.1 Remote sensing architectural images to be classified 图2 遥感建筑图像的边缘轮廓检测结果Fig.2 Edge profile detection results of remote sensing architectural images 根据图2的边缘检测结果,对不同纹理分布的遥感建筑图像进行边缘轮廓特征分析和纹理分布检测,结果如图3所示。 分析图3得知,采用本方法能有效实现对遥感建筑图像的纹理检测,根据纹理检测结果和边缘特征标记结果得到遥感建筑图像的优化分类结果,如图4所示。 图3 图像的纹理检测结果Fig.3 Texture detection results of the image 图4 遥感建筑图像的优化分类结果Fig.4 Classification results of remote sensing building images 分析图4可知,本方法能有效实现对遥感建筑图像的分类识别,对不同类别建筑物的分块检测能力较强。用不同方法进行建筑物分类,得到的误分率结果见表1。分析表1可知,用本方法进行建筑物分类的误分率较低。 表1 遥感建筑图像分类的误分率对比Tab.1 Comparison of misclassification rates of remote sensing architectural images 本研究提出了基于特征标记的遥感建筑图像分类方法。根据遥感建筑图像的异向性进行图像的区域特征检测识别,用显著图检测方法进行图像细节特征提取,采用机器学习方法进行遥感建筑图像提取过程中的自动寻优,采用自适应参数融合方法进行遥感建筑图像的多模态特征分解,根据相似度特征提取结果对不同纹理分布的遥感建筑图像进行边缘轮廓特征检测。由仿真分析可知,用本方法进行遥感建筑图像分类的误分率较低,特征辨识度较高,提高了对遥感建筑图像的识别能力。
2.2 遥感建筑图像的自适应分类
3 仿真实验与结果分析
4 结语
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
电子制作(2018年19期)2018-11-14 02:37:08
自动化学报(2017年5期)2017-05-14 06:20:56
自动化学报(2017年11期)2017-04-04 02:52:58
通信产业报(2016年44期)2017-03-13 08:41:45
光学精密工程(2016年1期)2016-11-07 09:01:59
噪声与振动控制(2015年4期)2015-01-01 07:08:21
轴承(2010年2期)2010-07-28 02:26:12
雕塑(1999年2期)1999-06-28 05:01:42
