
一种软体蛇形机器人电源结构设计
2020-11-29 14:06:06刘响响
机电信息 2020年33期
刘响响
(江西工业工程职业技术学院,江西萍乡337000)
0 引言
蛇形机器人因其在复杂环境中运行的优点而备受各领域关注。目前,蛇形机器人的用途分为两大类[1-5],一类是目标诊测,另一类是目标点处理(例如障碍物清理、设备故障维修等)。诊测领域对外界功率输出较小,因此对电源输出和续航需求较低;但是大距离运动和目标点处理则对电源续航和功率需求较高,因此,目前该领域普遍采用尾部拖电源线形式,由尾部电缆实时给蛇形机器人供电。但该种供电形式影响到了蛇形机器人实际使用的灵活性(常见问题如容易卡住尾拖线,电源线在运行过程中发生磨损漏电或线路断裂)[6-8],针对该问题,文中给出了一种软体蛇形机器人的电源系统设计。
1 软体蛇形机器人电源需求分析
根据软体蛇形机器人的结构可知[9],软体蛇形机器人关节系统与电机关节系统存在较大的差异,软体关节多数采用气囊或液态囊体,通过对可变形囊体的控制实现关节的伸展或者收缩,进而实现蛇形机器人关节的运动。为满足软体蛇形机器人对外做功和自身载荷的需求,需要提升机器人电源瞬时功率和电源电荷量,由于蛇形机器人体积较小,这就要求提升软体蛇形机器人自身形体的空间利用率。软体蛇形机器人关节结构如图1所示。
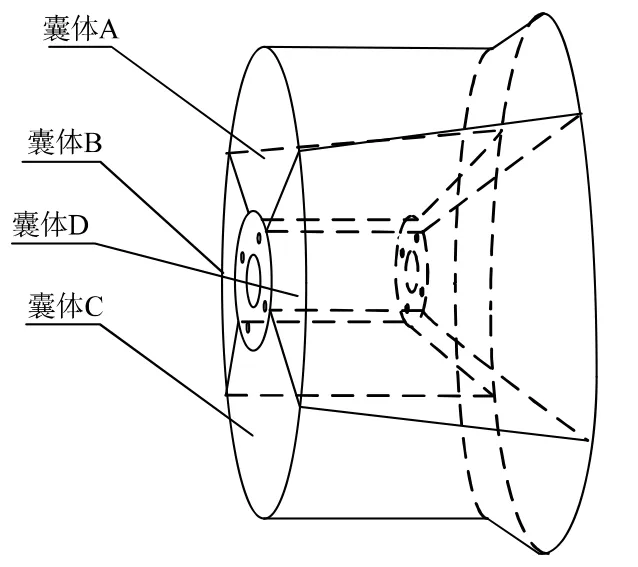
图1 软体蛇形机器人关节结构
2 蛇形机器人电源组成结构布置
根据前面的分析,软体蛇形机器人可以采用双电源结构,其中一个电源系统内置在蛇形机器人每个关节的四个囊体中,即囊体电源部分。所谓“囊体电源”,即改变囊体内置物,在蛇形机器人关节的A、B、C、D四个可变形囊体中充入液态电解液,当蛇形机器人关节需要做相应的运动时,只需将各个囊体中的电解液通过液态泵抽取到相应的囊体中,即可改变相应囊体的形状,完成关节的动作。不管蛇形机器人关节囊体如何变化,囊体中的电解液都不会减少,电解液中存放的电荷量都能通过相应的电路结构对机器人本体提供电源。
另外,在蛇形机器人关节的中心,也就是图1中前后法兰盘中间连接部分内置软体电池串,该部分电源称为“脊柱电源”,其结构如图2所示。
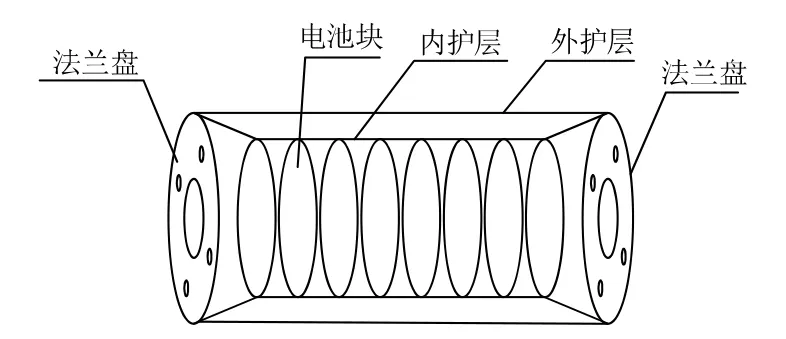
图2 蛇形机器人脊柱电源结构图
图2中,法兰盘用于连接机器人前后关节系统;每个蛇形机器人关节的脊柱结构内置可充电型锂电池块8块,每个圆柱形电池底面直径2 cm,电池柱高0.5 cm,每两个电池之间采用弹性橡胶囊块作为间隔方式,间隔块之间通过电极片和导电性弹簧连接。电池局部结构如图3所示。
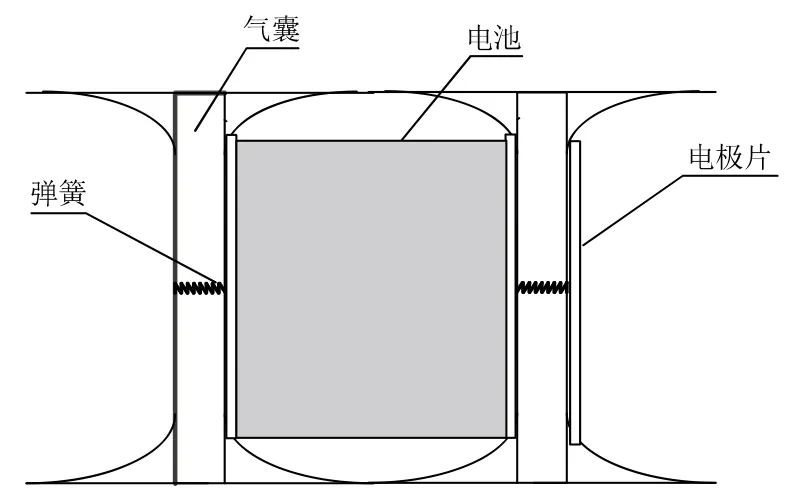
图3 电池局部结构图
图3中,气囊的存在使得单体电池之间可以灵活弯折,能够适应蛇形机器人关节的转弯,并且在蛇形机器人运动过程中不影响电池结构对外输出电源。电池正负极之间采用弹簧结构连接,以适应运动过程中电路系统对稳定性的要求。
3 蛇形机器人电源电路系统设计
蛇形机器人各关节中存在4个囊体,各个囊体中充溢着液态电解液,每个小囊内壁均由弹性材料构成,并且囊体之间存在连通管和控制阀,由控制器实现对各个囊体的控制,相当于4个可变容量电池,电路原理如图4所示。由于各个囊体中电解液随关节的伸缩而发生增减,单个关节的电压也会随之变化,所以采用串联形式,使各个关节的囊体电池构成一个串联电路,组成一个串联电压源,最后经整流芯片完成对该部分电压源的电压、电流整合,以满足蛇形机器人的液态泵和附属装置的电源需求。
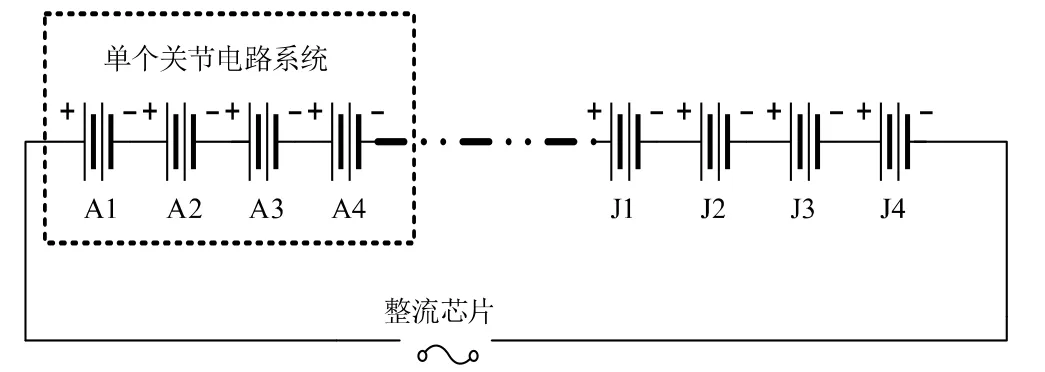
图4 蛇形机器人关节囊体电路组成
在蛇形机器人关节的中心存在一条圆柱形柔性材料制造的电池组,这些由锂电池块首尾相连组成的电池组形成了一个单体电源——脊柱电源。通过并联的形式将蛇形机器人各关节的脊柱电源进行连接,形成一个稳定的电压源,对外部设备供电。每个锂电池额定电压选取为1.5 V,单个蛇形机器人关节内脊柱可形成12 V额定电压。蛇形机器人脊柱电池组结构如图5所示。
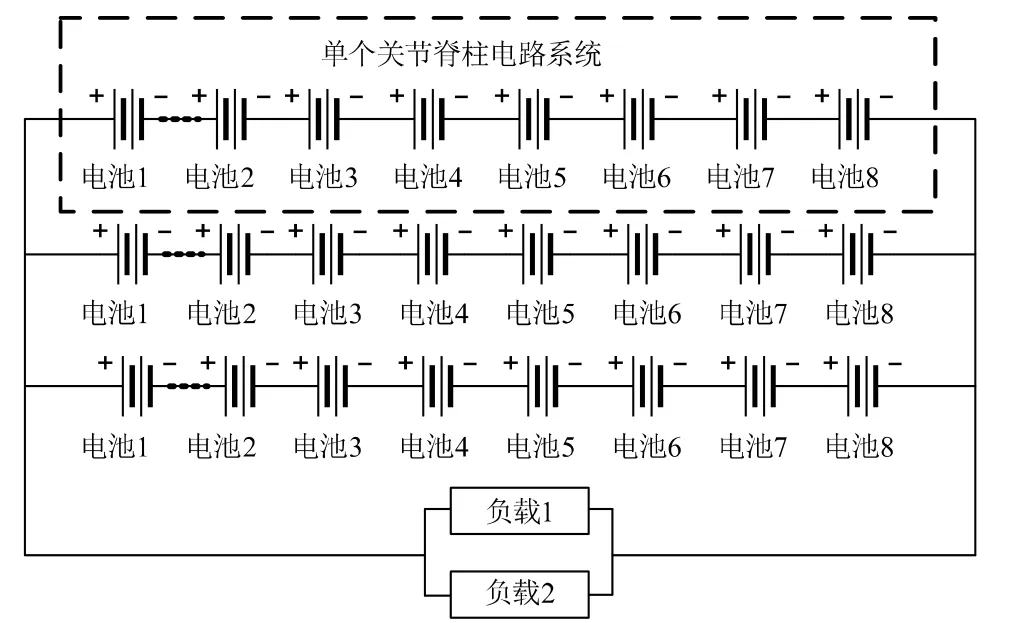
图5 脊柱电池组连接结构图
4 结语
因驱动电源受到机器人结构的限制,蛇形机器人续航能力不足。本文对蛇形机器人自身结构进行了改进设计,能够实现电源与机器人自身结构的良好结合,提升机器人的电源续航稳定性,同时也能更好地实现机器人仿生性能,降低无用功能耗。
猜你喜欢
军事文摘(2024年4期)2024-01-09 09:07:58
海洋科学(2022年5期)2022-06-22 03:04:28
现代防御技术(2021年6期)2022-01-06 13:15:38
军事文摘(2021年18期)2021-12-02 01:27:58
上海交通大学学报(2021年2期)2021-03-02 10:17:22
军事文摘(2020年24期)2020-11-29 06:35:54
纺织科技进展(2019年12期)2019-12-26 03:27:08
中国特种设备安全(2018年10期)2018-12-18 02:17:18
电站辅机(2017年3期)2018-01-31 01:46:38
金色年华(2017年13期)2017-04-04 02:55:52
