基于改进模型预测控制的三相并网逆变器控制策略研究
2020-11-25 04:12王素娥刘晨曦郝鹏飞
陕西科技大学学报 2020年6期
王素娥, 刘晨曦, 郝鹏飞
(陕西科技大学 电气与控制工程学院, 陕西 西安 710021)
0 引言
并网逆变器是分布式发电系统与电网连接的重要环节,其性能直接影响新能源装置输出的电能质量,为了保证电网安全稳定运行,并网逆变器控制策略的研究必不可少[1,2].
目前并网逆变器多采用电流控制[3],电流控制的目标是实现对给定电流的快速精确跟踪,以避免谐波含量过高对电网的影响[4].文献[5]采用电流比例谐振(Proportional Resonant,PR)控制,PR控制在跟随正弦信号时,不存在稳态误差,避免了坐标变换,但其在并网电流谐波含量上不具有优势[6,7].电流比例积分 (Proportional Integral,PI)控制简单,易于实现,且控制效果理想,是工业界和学术界的经典控制器,因此得到广泛应用[8].文献[9]在PI控制器的基础上,提出一种基于αβ静止坐标系的比例复数积分(Proportional Complex Integral,PCI)控制,该方法消除了并网电流稳态误差,但由于PCI具有选频特性,当频率波动时,其增益可能会衰减[10,11].文献[12]采用了传统有限集模型预测控制(Model Predictive Control,MPC),根据预先定义的最优化准则来选择最优的开关状态,并在此基础上进行了延时补偿的分析.但传统的有限集模型预测控制不需要进行调制,其在一个周期内有效的开关状态仅有7种,导致控制精度较低[13,14].
本文首先对三相并网逆变器数学模型进行分析,对传统有限集模型预测控制进行简要介绍,然后采用改进的方法,通过增加开关函数个数并对实时电感值进行有效预测,从而有效提高电流控制精度,最后的仿真和实验证明了所提出方法的有效性.
1 三相并网逆变器数学模型
三相电压源型逆变器拓扑结构如图1所示.为了保证该逆变器在并离网时都有较好的输出,因此滤波器采用LC型,其中,Udc为直流侧电压,L、R、C分别为逆变器交流侧滤波电感、等效电阻和滤波电容,ea、eb、ec和ia、ib、ic分别为电网电压和并网电流.
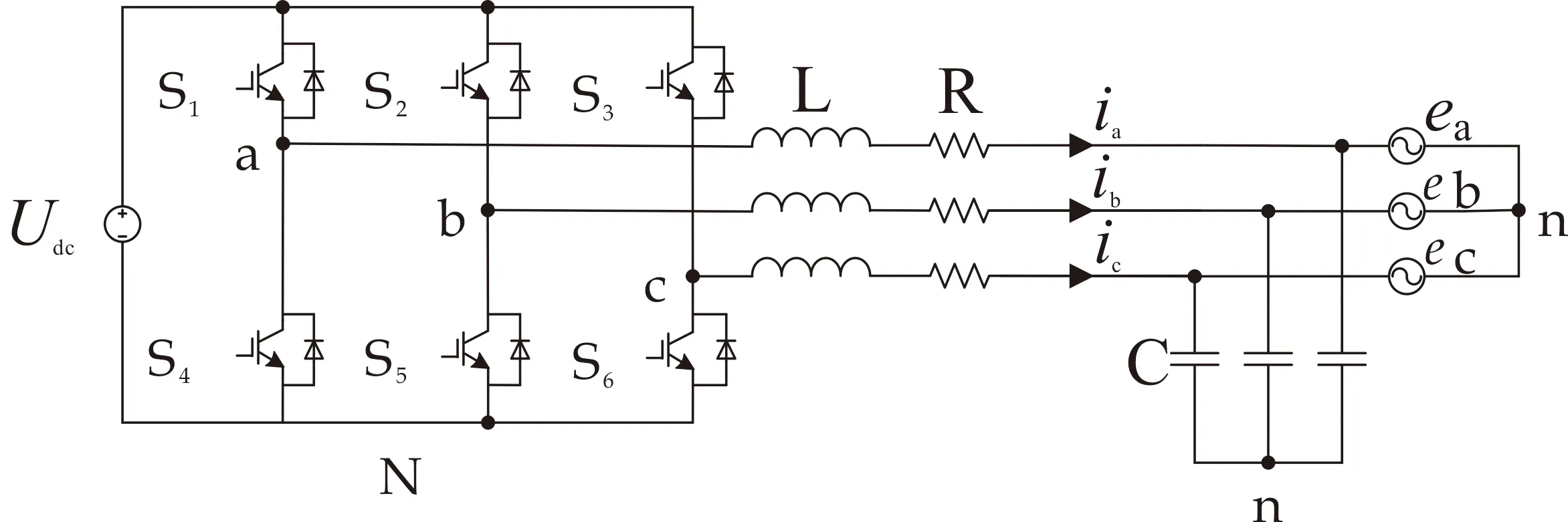
图1 三相电压源型逆变器拓扑结构
为了避免逆变器的直流侧电源短路,每一次相位操作中都有两个不同的开关状态,逆变器输出的三相电压uaN,ubN,ucN根据开关状态的变化而改变.因此输出电压矢量[15]为:
(1)
式(1)中:单位矢量a=ej2π/3代表相间的120 °相位差.从而不同的开关状态在复平面中产生8种电压矢量如图2所示.
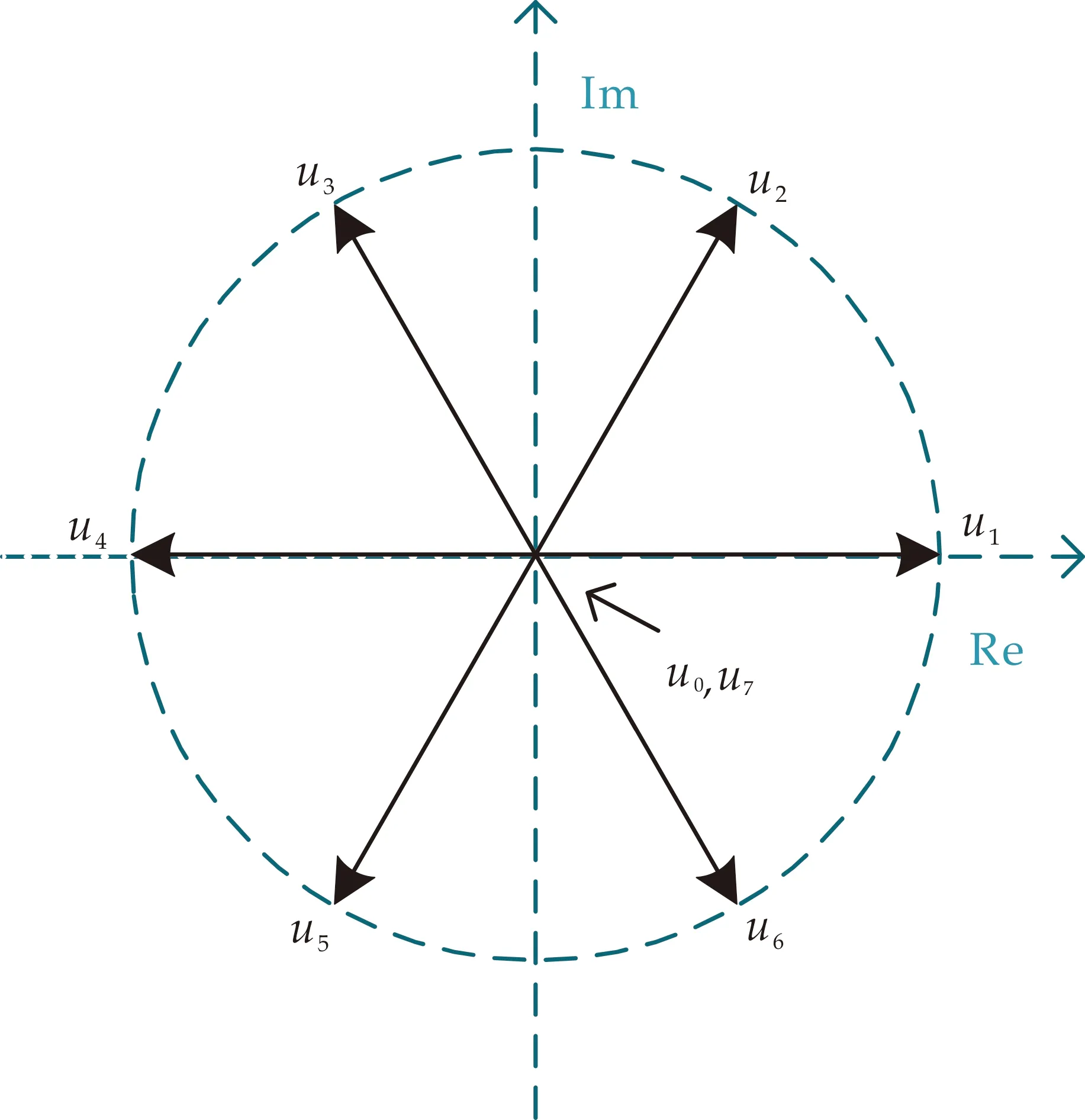
图2 复平面中的8种电压矢量
由图1和基尔霍夫电压定律(假定unN+aunN+a2unN=0)得到三相逆变器输出侧的动态方程[16]为:
(2)
根据Clarke变换矩阵:
(3)
将式(2)由abc坐标变换至αβ坐标下的矩阵形式为:
(4)
2 传统模型预测控制
传统有限集MPC的工作原理[17]如图3所示.其中,ip为预测电流,系统的期望行为被表示为根据电压矢量ui(i=0~7)只能得到7个(u0与u7对应相同的g)不同的评价函数g,并由于这一限制,使得在线选择优化电压矢量成为可能.每个电压矢量都有对应的预测电流ip,根据评价函数g选择合适的电压矢量ui,最终在开关管中直接应用最优电压矢量.这种控制策略分为以下几个步骤:(1) 建立可能的开关状态;(2) 建立用于预测的数学模型;(3) 定义和应用评价函数选择最优矢量;(4) 应用最优矢量对应的开关状态.
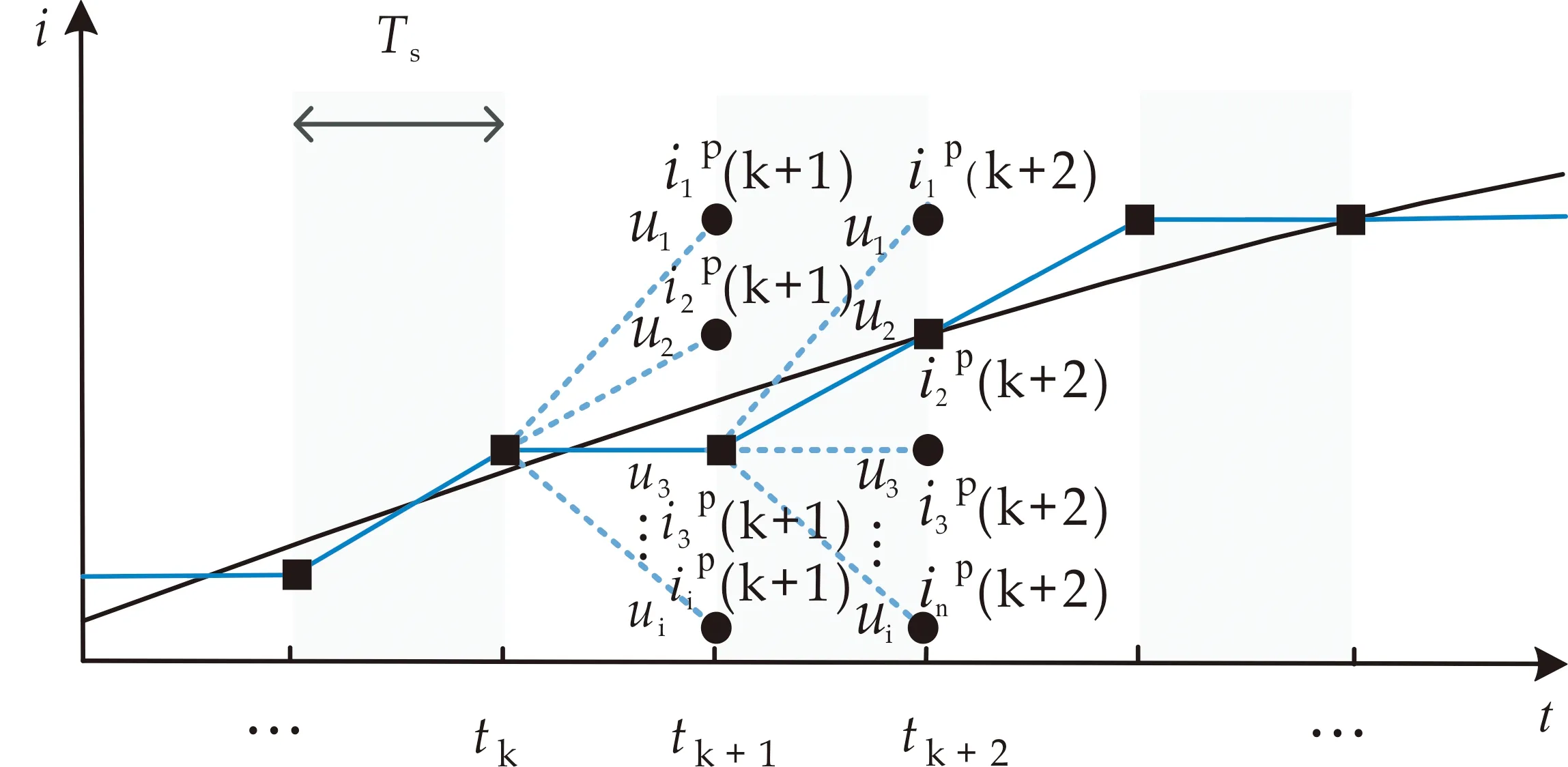
图3 传统有限集模型预测控制策略工作原理
通过前向欧拉逼近公式[18]有:
(5)
式(5)中:Ts为采样周期,将式(5)代入式(4),得预测电流模型:
(6)
电流控制的目标是负载电流与参考电流之间的误差最小,一般选择评价函数g[19]:
(7)
3 改进的模型预测控制
3.1 改进算法的原理
由图2可知,传统的有限集模型预测控制在复平面有8种电压矢量.当选择出的电压矢量大于实际需要的值时,若采用当前的ui来控制逆变器的开关状态,则不可避免地对预测电流产生较大的逼近误差,导致预测电流偏离参考电流.
针对以上存在的问题,本文通过增加两组开关电压矢量来缩减电流的逼近误差,在已有电压矢量的基础上增加2/3ui(i=0~7)和1/3ui(i=0~7)两组开关电压矢量.由于传统模型预测控制预测的最终结果直接是开关管的开关状态(8种),因此一个周期内只有8种开关状态可供选择;该改进方法在一个周期内增加了12种可供选择的电压矢量,这12个电压矢量对应12个不同的开关状态.改进后的电压矢量如图4所示.即在一个采样周期Ts内的开关状态为有效电压矢量和零矢量的组合,然后将其直接应用在开关管上,使计算出的预测电流与参考电流的逼近误差更小,预测模型更加精确.
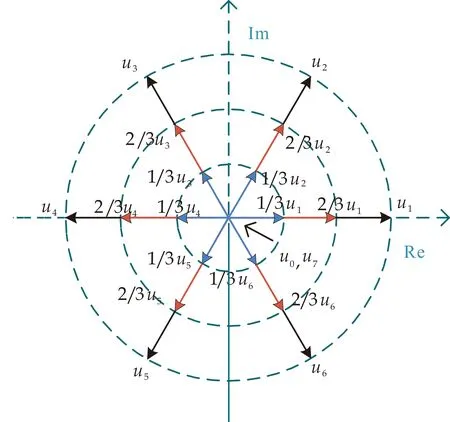
图4 改进后的电压矢量
根据式(7)计算出的评价函数g确定合适的初始电压矢量ui,再将此数据送入校验模块,对ui、2/3ui和1/3ui对应的逼近误差进行分析,判断出不同的状态(Switch=0,1,2),最终选择合适的电压矢量.不同Switch下向量的实现如表1所示,根据对Ts内向量作用时间为Ts、1/3Ts、2/3Ts来实现不同的电压矢量.
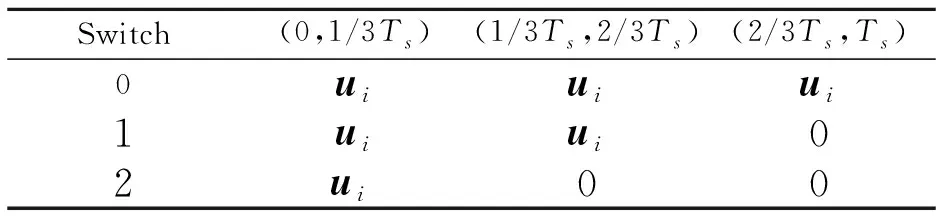
表1 不同Switch下向量的实现
3.2 实时电感预测
在采用有限集模型预测算法对三相并网逆变器进行控制时,由式(6)可知,该算法的控制性能与电路交流侧滤波电感L和电阻R有很大关系.在系统实际运行中,电感值会随着电压、电流等的影响而发生改变,从而与模型中初始给定的电感值不匹配,为了消除这一因素对控制准确性的影响,有必要采取一定的方法实时获取工作时的实际电感值.
基于有限集模型预测的思想,由式(6)得到实时电感值[20]为:
(8)
式(8)中:iα(k)和iα(k-1)分别为k和k-1时刻预测并网电流的α轴分量,uα(k)为逆变器输出电压的α轴分量,eα(k)为电网电压的α轴分量.
由于当预测并网电流iα(k)和iα(k-1)相同时,会导致式(8)右侧分母值为0,使得预测结果L(k)出现无穷大的情况,因此在实际计算时,需要增加限幅环节,并将这一计算结果舍弃掉,选择上一时刻的计算结果作为当前电感值.考虑到算法中存在微分量,干扰信号的输入不可避免地使计算结果出现高频振荡,因此电感计算公式不能在整个区间内有效预测实际电感值.初始电感预测值如图5所示,在电网电压的α轴分量eα(k)峰值附近时,对电感值的计算结果最精确,因此当eα(k)处于峰值附近时,利用式(8)对电感值进行预测,而在其他时刻,电感值保持前一时刻的计算值不变,由此对算法进行校正.实时电感预测算法流程如图6所示.
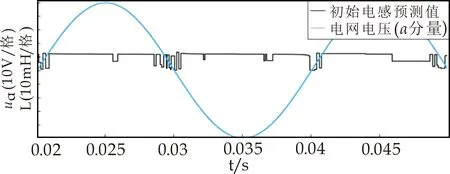
图5 初始电感预测值
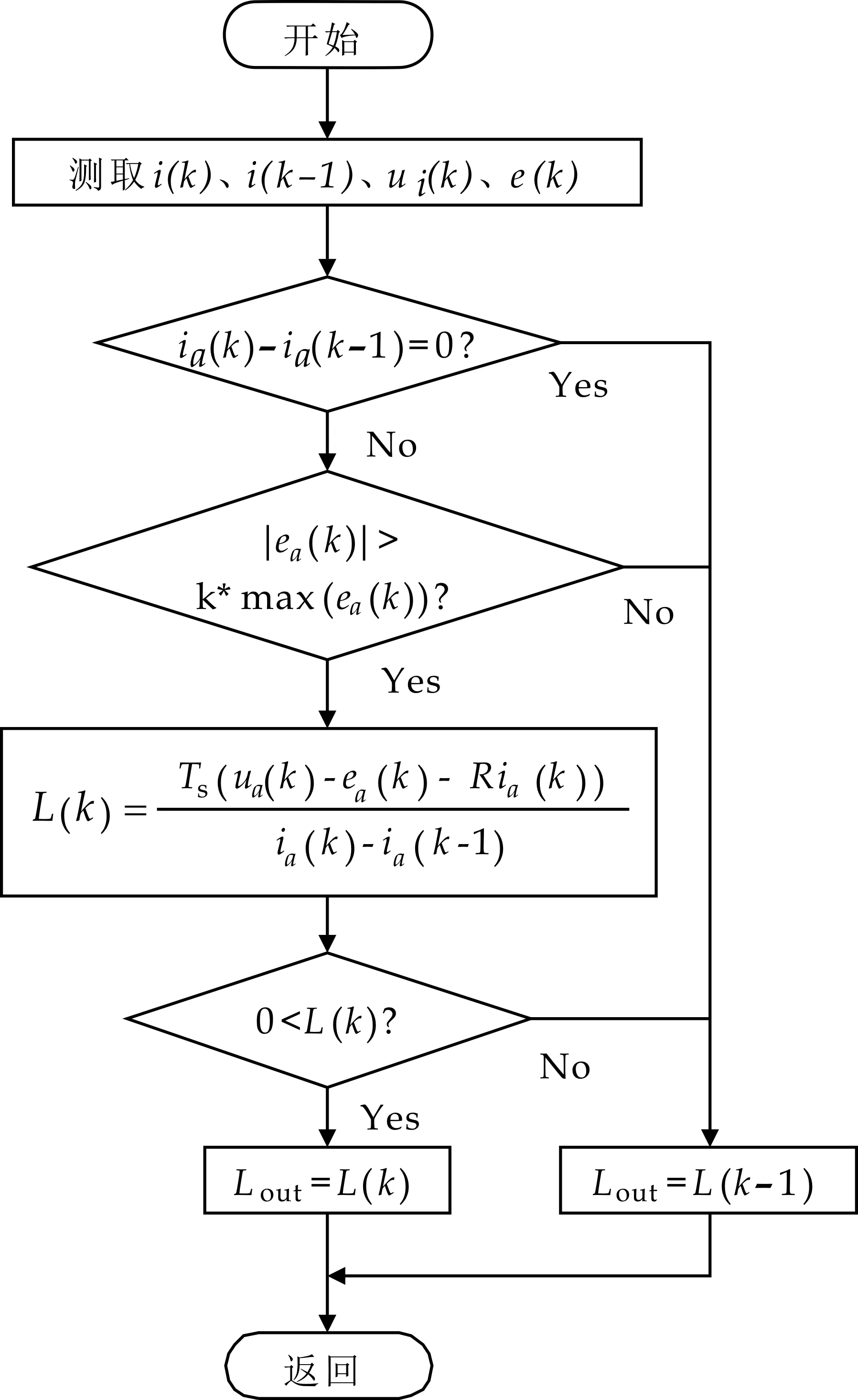
图6 电感预测算法流程图
在对并网电流进行预测计算时,将电感预测计算得到的实时电感预测值代入电流预测模型中,从而求得相应的模型预测结果,输出准确的开关状态控制开关管通断.
3.3 改进的模型预测控制器设计
系统的整体控制结构框图如图7所示.由图7可知,系统整体控制时,首先要对并网电流i(k)和电网电压e(k)进行采样,为了减少计算量,经过Clarke变换,将三相并网电流转换到两相静止坐标系(αβ坐标系)中;然后将电网电压进行锁相,得到给定参考电流iα,iβ;再根据预测模型对电感值进行实时预测,循环8次计算预测电流值和评价函数g,判断当前的评价函数和2/3ui(i=0~7)、1/3ui(i=0~7)两组开关电压矢量下的评价函数值的大小;最后选择最优的开关状态执行.
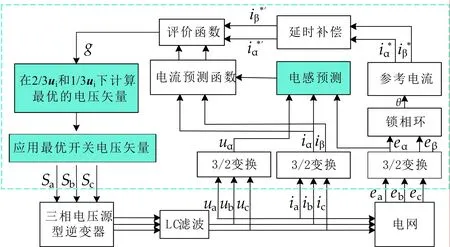
图7 系统整体控制结构框图
具体的程序控制流程图如图8所示.
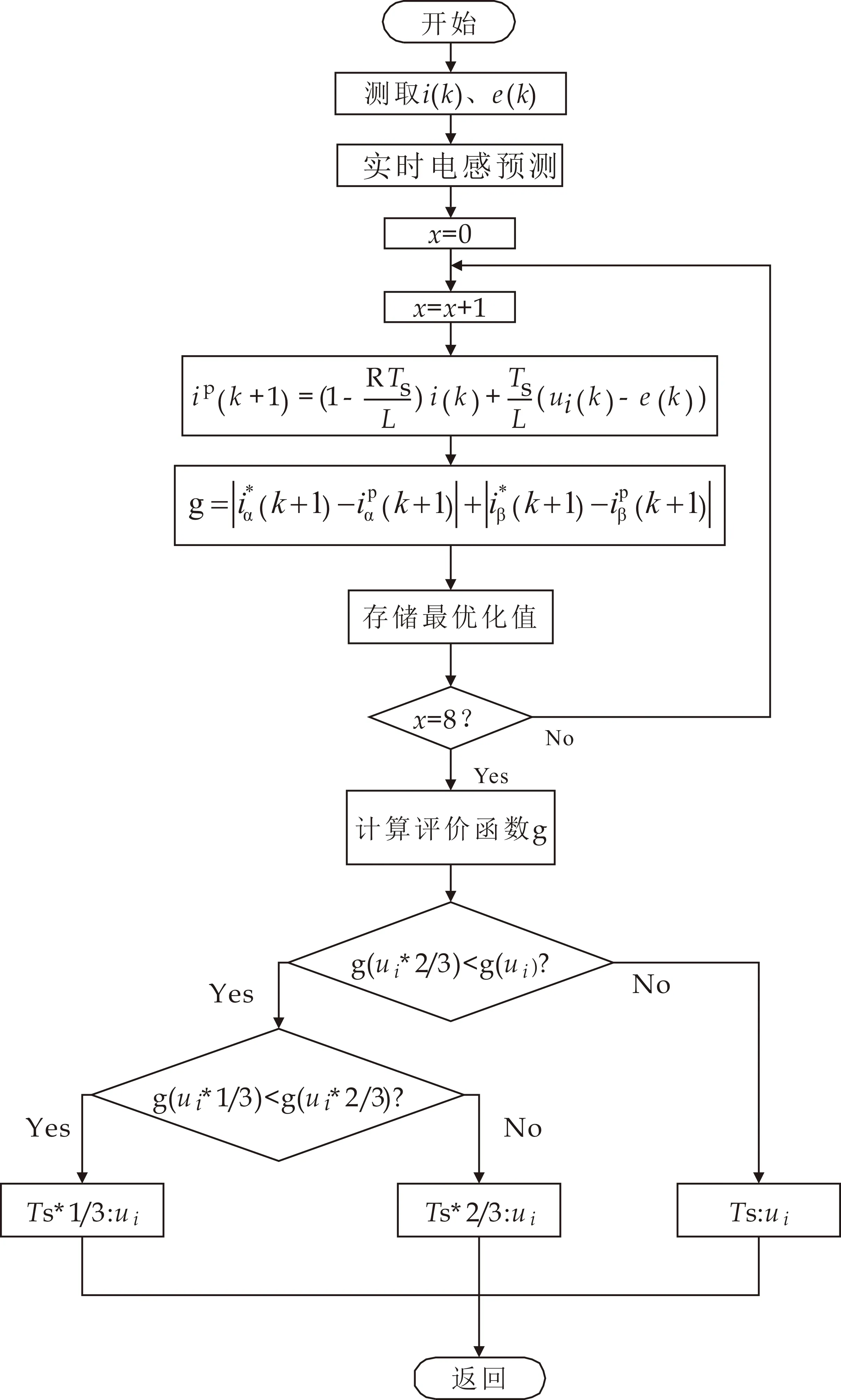
图8 控制流程图
4 仿真与实验验证
为了验证本文所述改进方法的有效性,通过Matlab/Simulink对传统模型预测控制算法和改进算法在并网逆变器中的应用分别进行仿真,验证了改进算法的有效性.系统仿真参数如表2所示.
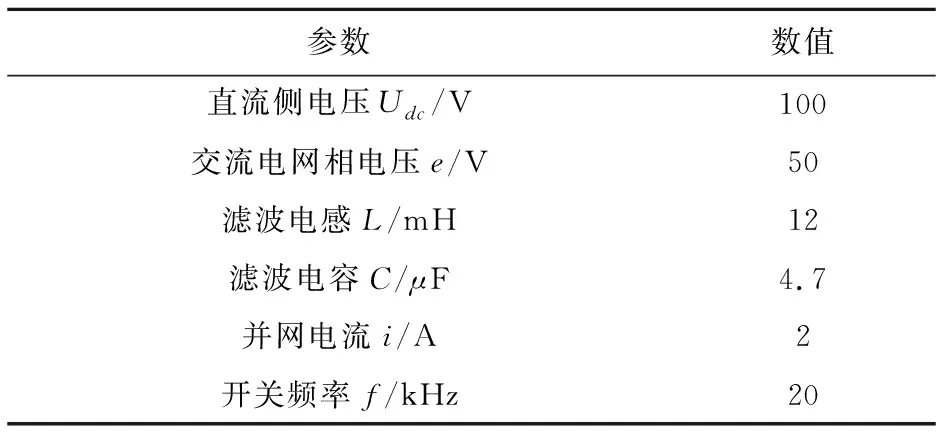
表2 系统仿真参数
并网逆变器的电压电流波形如图9所示,在0.5 s开始并网,并网电流峰值为2A.由图9看出,并网电流可以实现在短时间内快速跟踪.
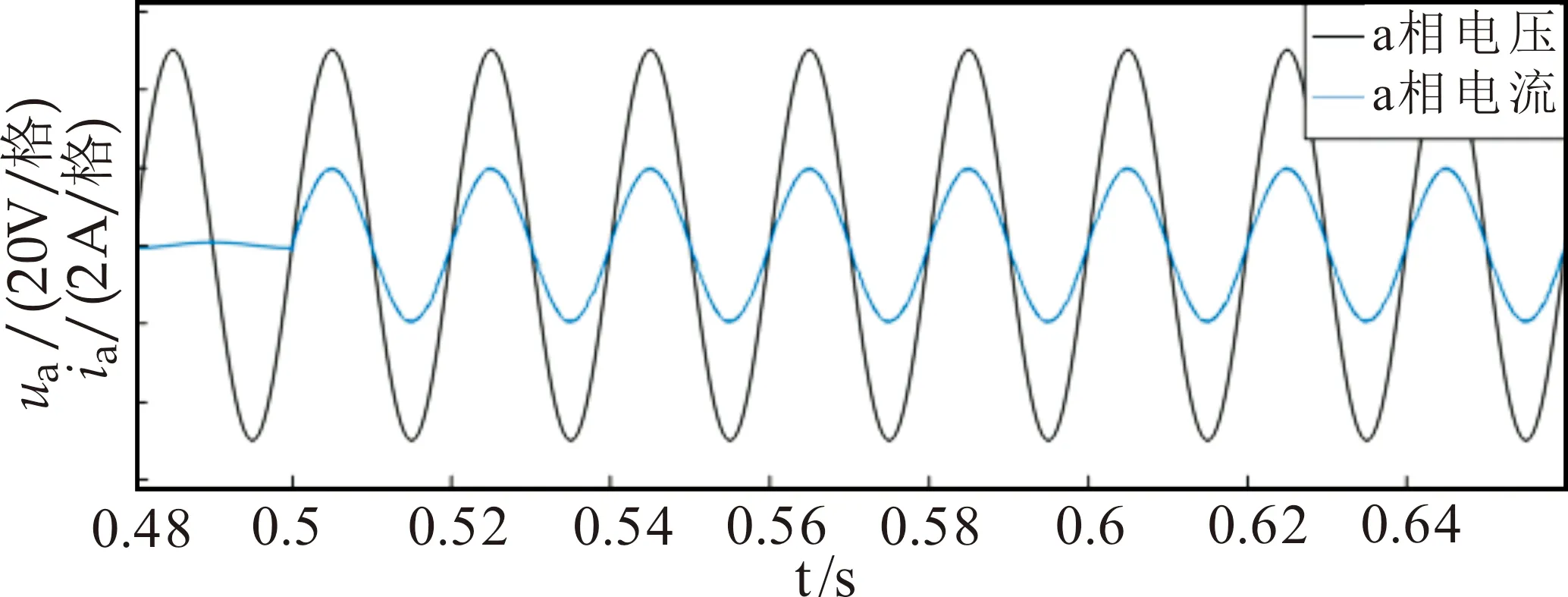
图9 并网逆变器的电压电流
Switch状态选择结果如图10所示.根据评价函数g确定合适的电压矢量ui后,将此数据送入校验模块可得到Switch状态选择结果.从图10可以看出,该算法可针对不同电流预测结果选择对应的Switch状态,从而进一步对开关状态进行控制.
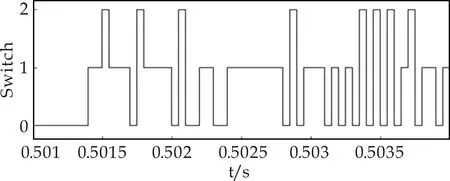
图10 Switch状态选择结果
改进模型预测控制算法计算出的评价函数g和电流跟踪波形如图11所示.从图11(a)可以看出,预测的评价函数基本位于0.15以下;从图11(b)可以看出,实际电流可以较好的跟踪参考电流,且跟踪误差很小.
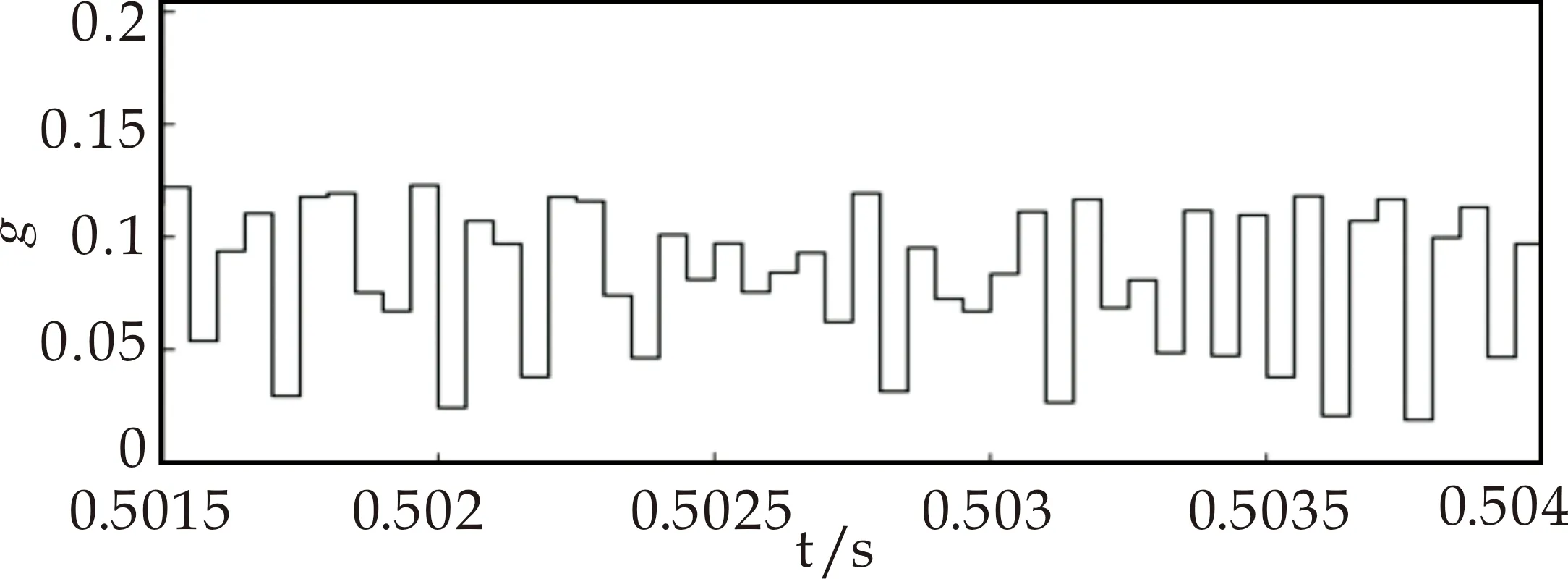
(a)评价函数g
(b)电流跟踪波形图11 改进算法的评价函数g和电流跟踪波形
实时电感预测的仿真结果如图12所示.在0.02~0.2 s、0.2~0.4 s和0.4~0.6 s对应的实际电感值分别为20 mH、15 mH和10 mH,可以看出预测的电感值十分接近实际给定的电感值大小,且预测结果稳定.在0.02 s瞬间,预测初始值为0,经过0.005 s后即可准确计算出预测电感值.若不采取电感预测的措施,当电感值发生变化时,模型依然使用初始的电感参数对电流进行预测,则会导致模型预测出现偏差,从而使预测精度降低.
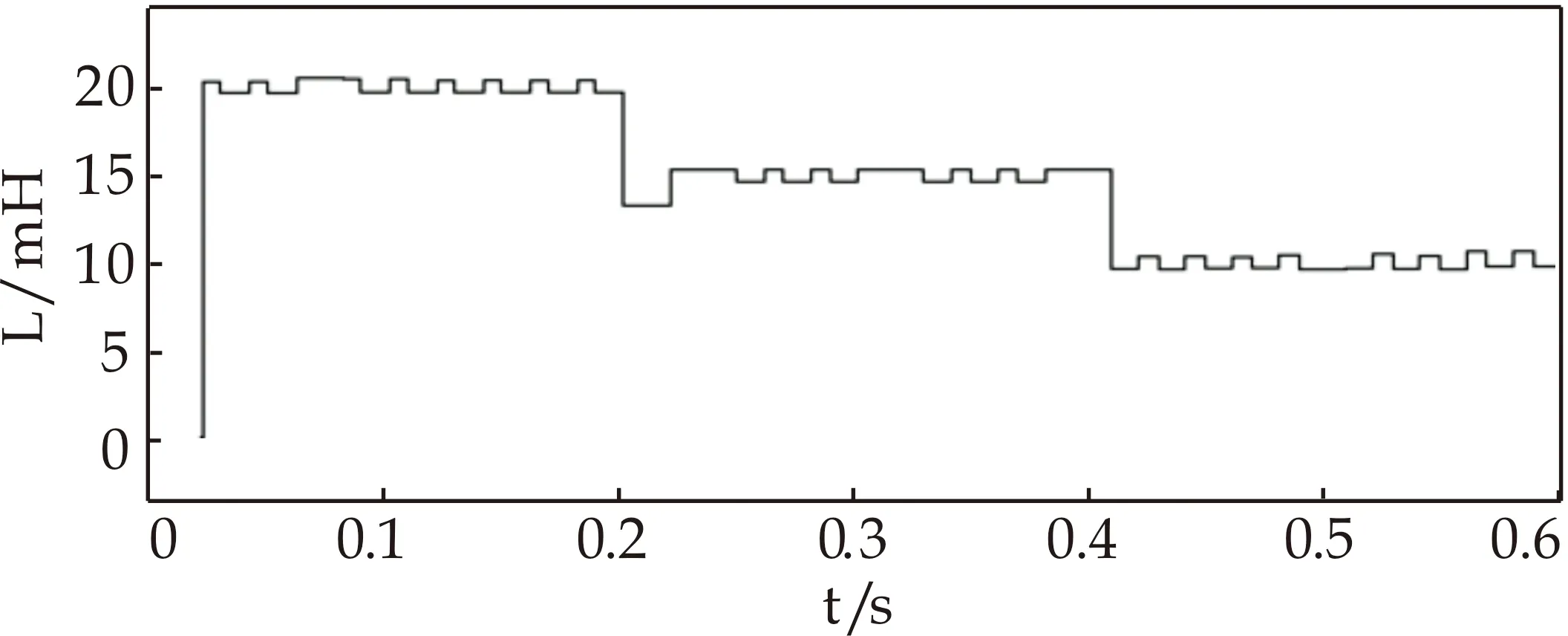
图12 实时电感值预测结果
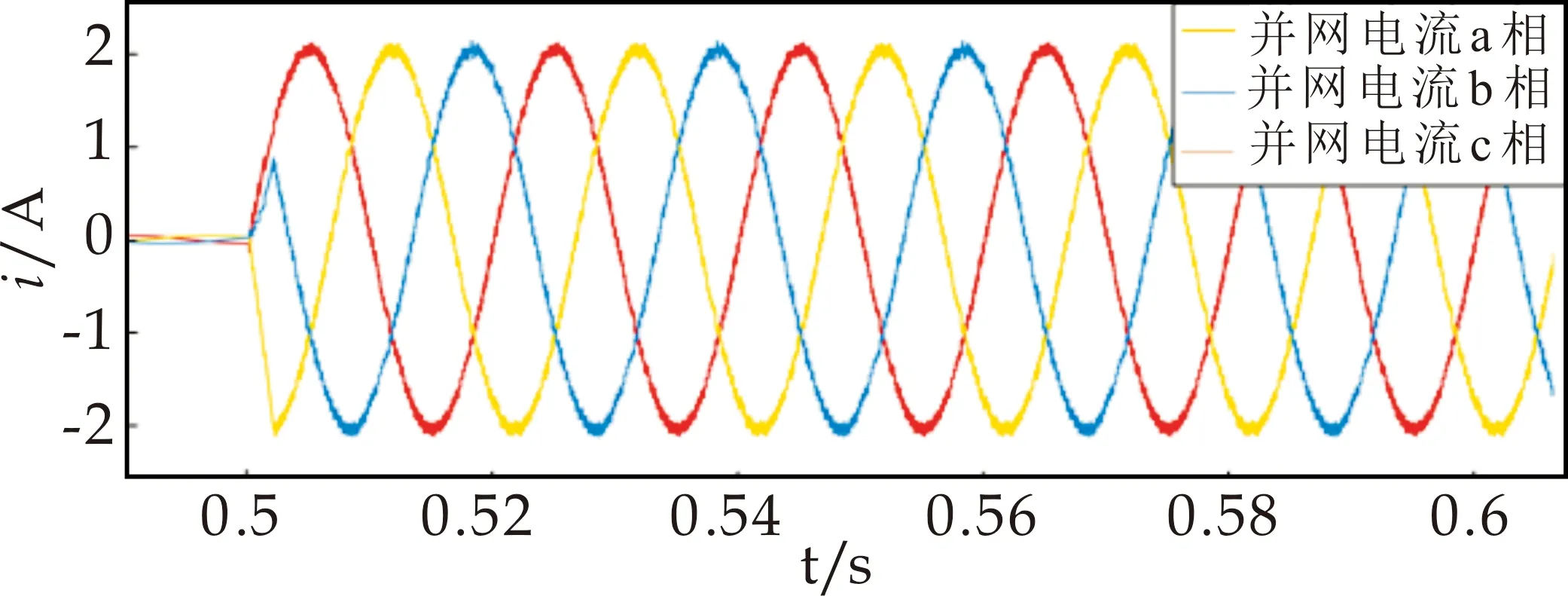
传统模型预测控制的并网电流与畸变率如图13所示.电流的谐波含量较高,改进算法的并网电流与畸变率如图14所示.通过对比可以看出,逆变器输出电流可以迅速响应,改进后的波形质量有很大改善,THD从3.36%下降到2.54%.
(a)传统模型预测控制的并网电流
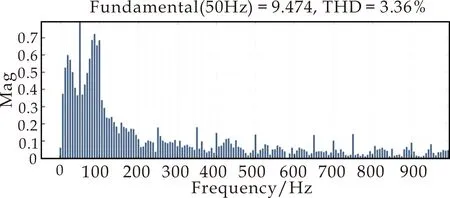
(b)传统模型预测控制的并网电流畸变率图13 传统模型预测控制的并网电流与畸变率
(a)改进模型预测控制的并网电流
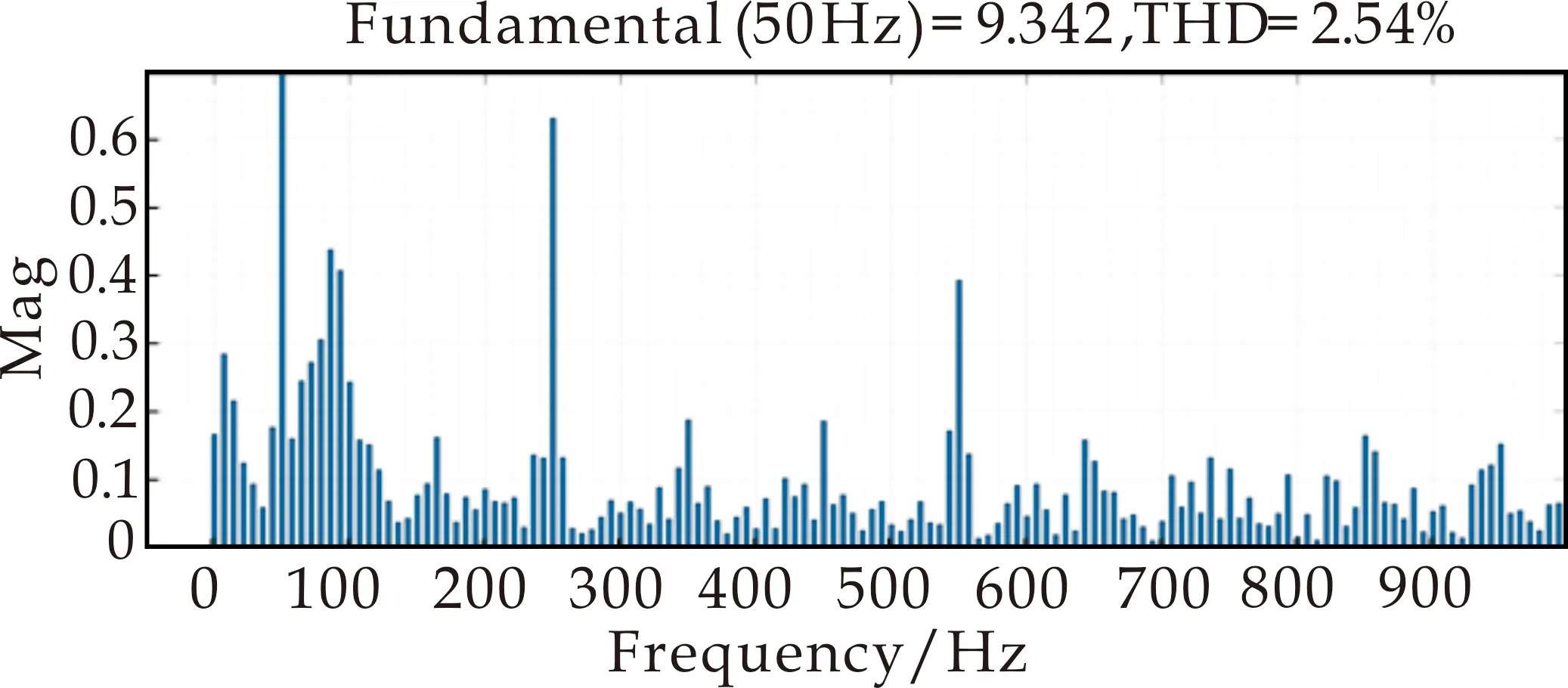
(b)改进模型预测控制的并网电流畸变率图14 改进模型预测控制的并网电流与畸变率
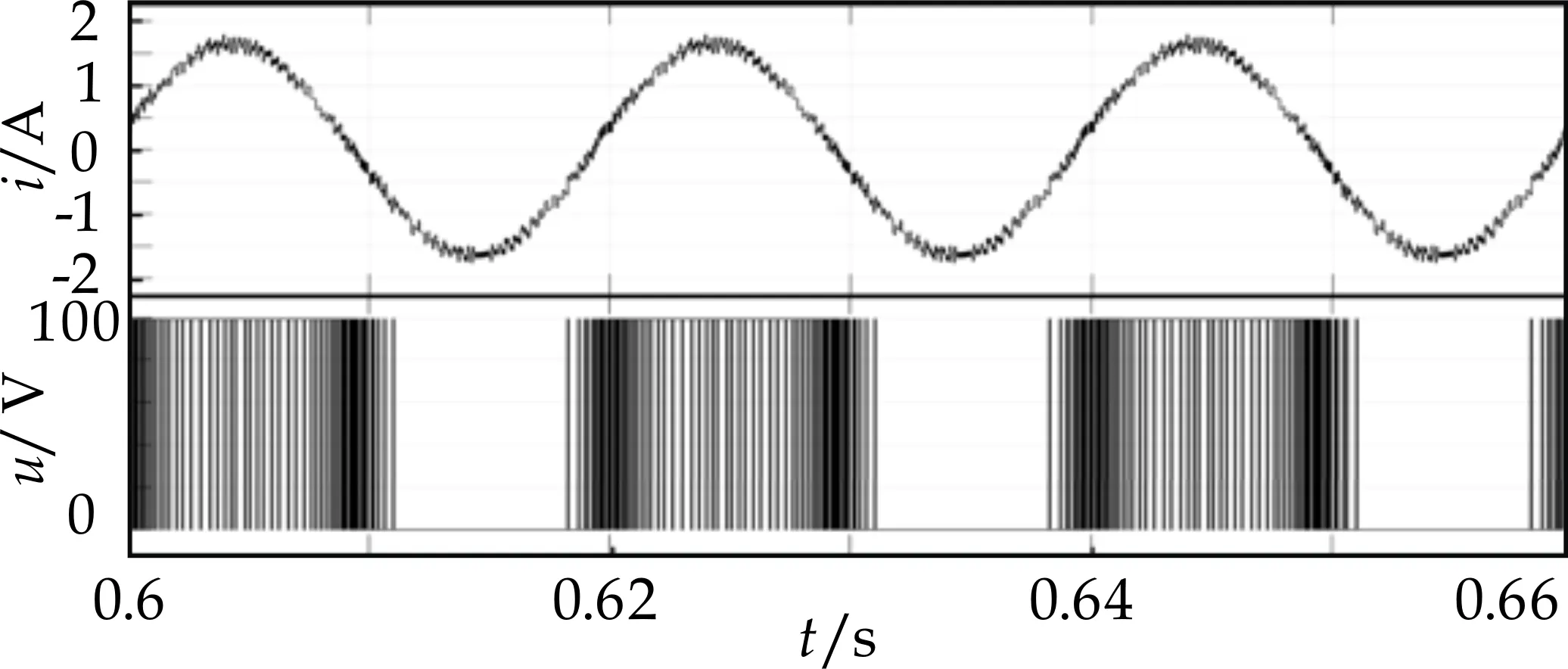
图15为a相电流波形及aN处开关管两端的电压波形.与传统控制方法相比,改进方法的开关管在一个周期内存在开通和关断两种状态,而不是单纯的开通或关断,使得控制精度更高.
(a)传统算法
(b)改进算法图15 a相电流及aN电压波形
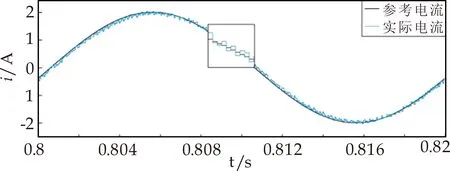
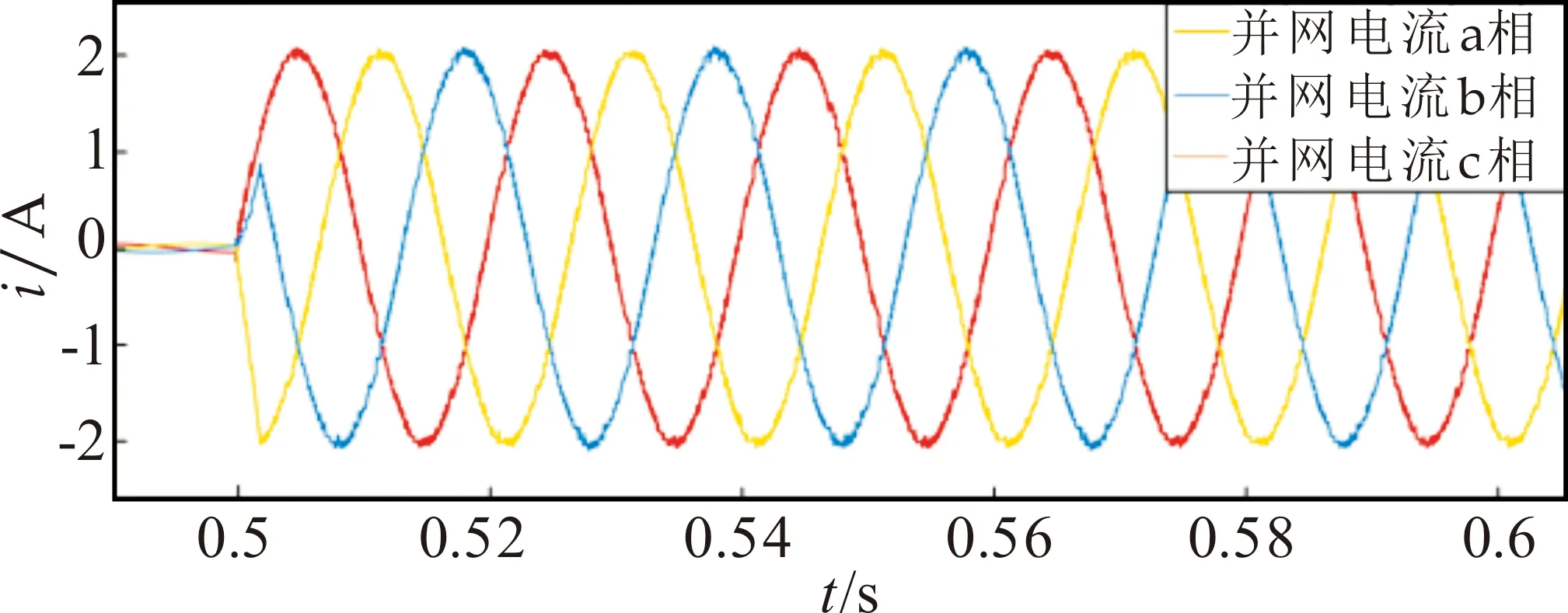
图16为改进前后评价函数g的值.从图16可以看出,该值的平均幅值降低了0.1左右,直观地反应出该改进算法使得给定和反馈之间的误差更小.图17为改进后的给定电流变化时的并网电流动态波形,从该波形可以看出改进的模型预测控制方法可以快速且稳定地跟踪给定电流波形.
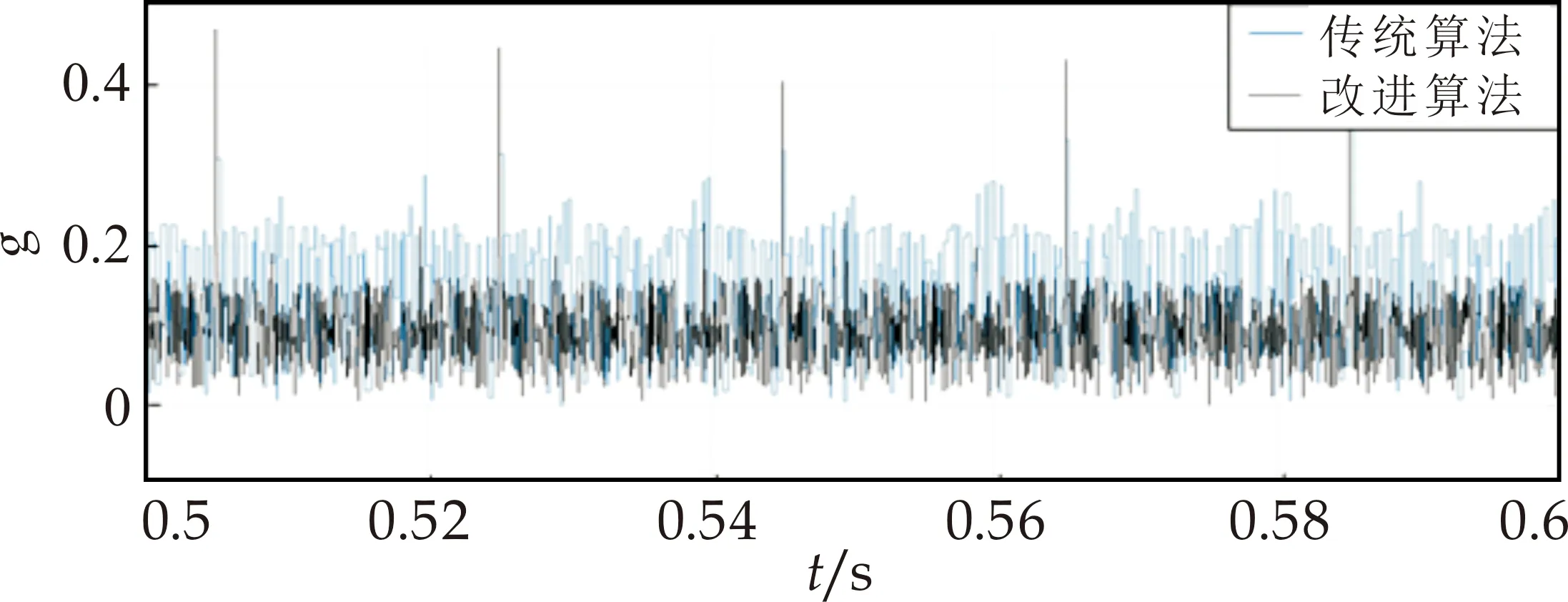
图16 改进前后的评价函数g
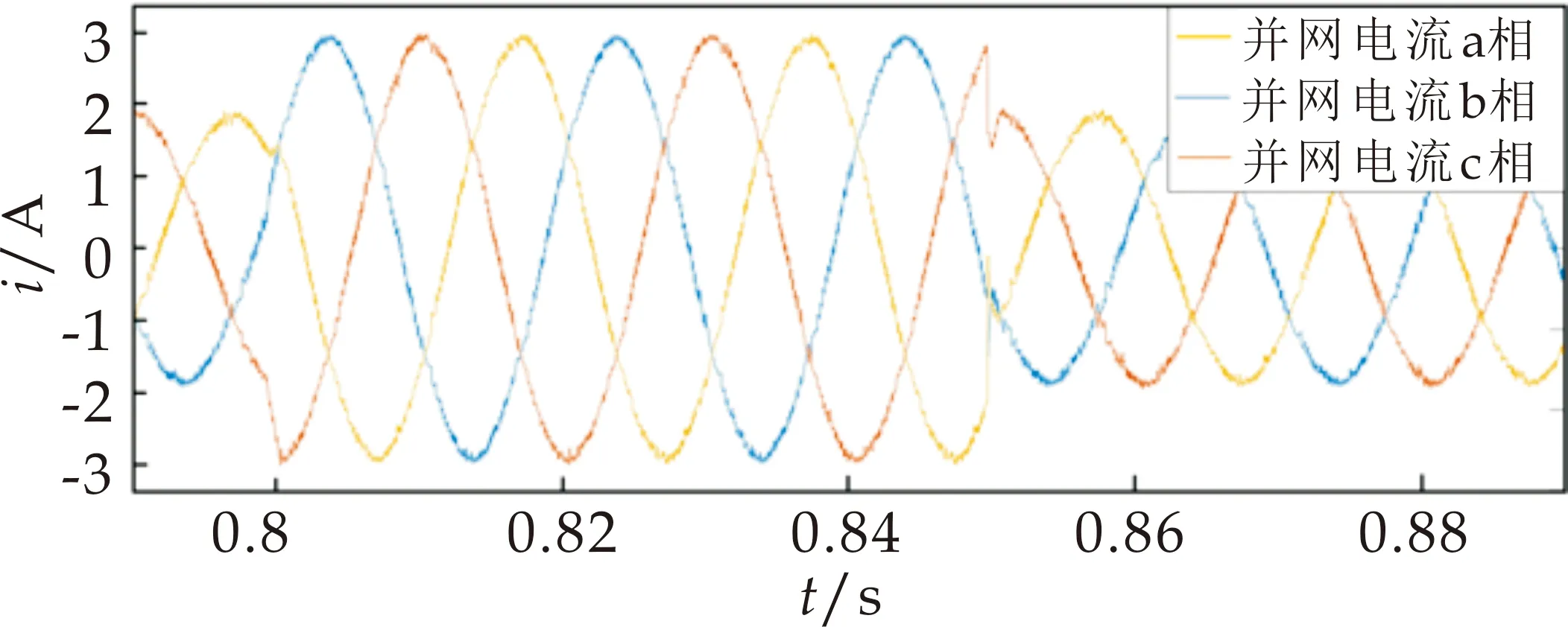
图17 改进算法并网电流的动态波形
为了进一步验证本改进模型预测控制策略对并网电流控制的可行性,搭建了基于TMS320F28335芯片的实验平台.该实验平台由三相并网逆变器,三相隔离变压器和三相调压器组成,如图18所示.
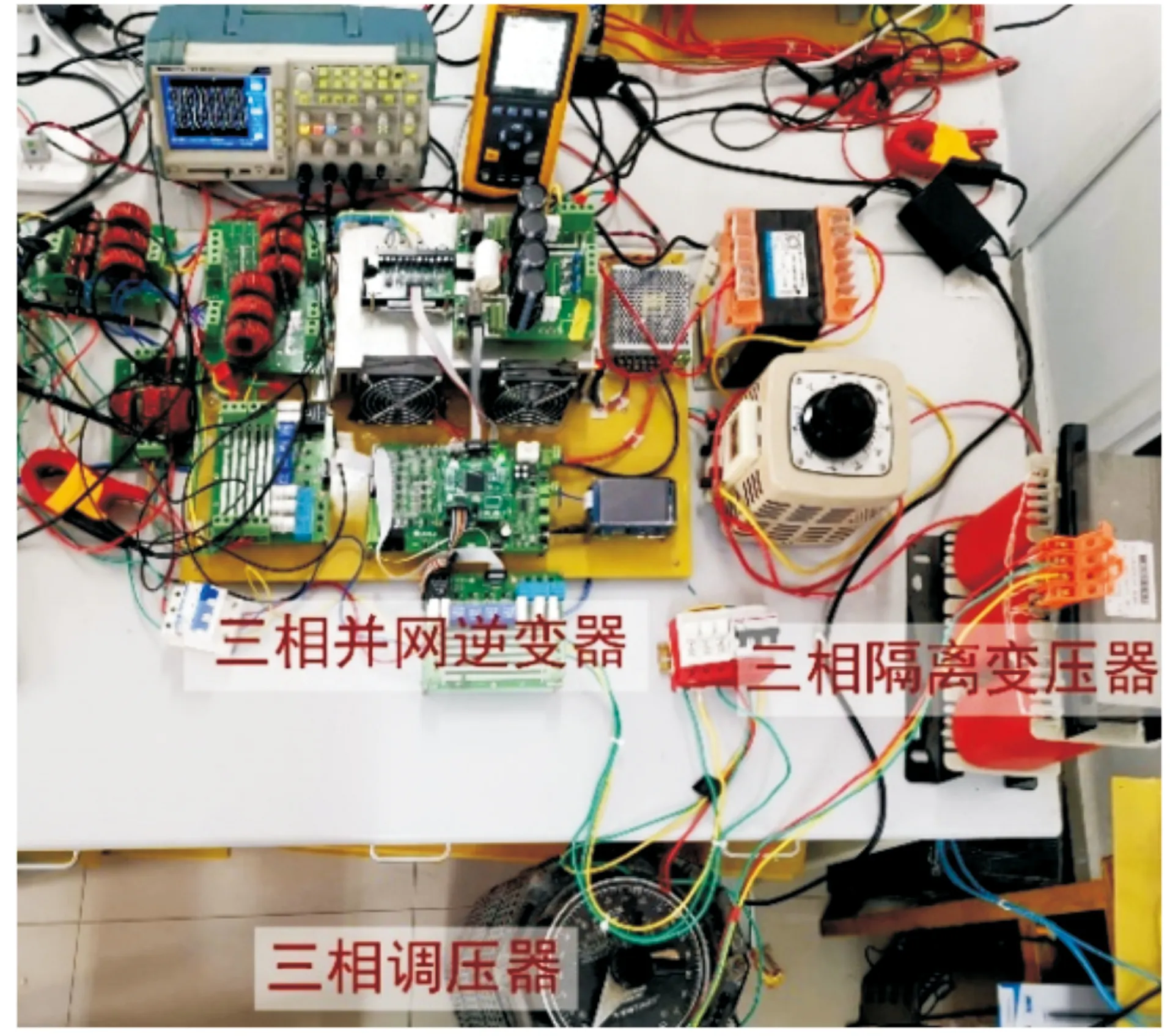
图18 三相并网逆变器实验平台
系统实验参数与仿真参数一致.实验的并网电流和畸变率分析如图19所示.图19(a)为传统算法的a相电流波形及畸变率,图19(b)为改进算法的a相电流波形及畸变率.可以看出,传统模型预测控制下的电流波形质量较差,而采用改进算法的电流跟踪效果明显改善,THD从5.8%降低至3.8%,对并网电流有较好的控制效果.
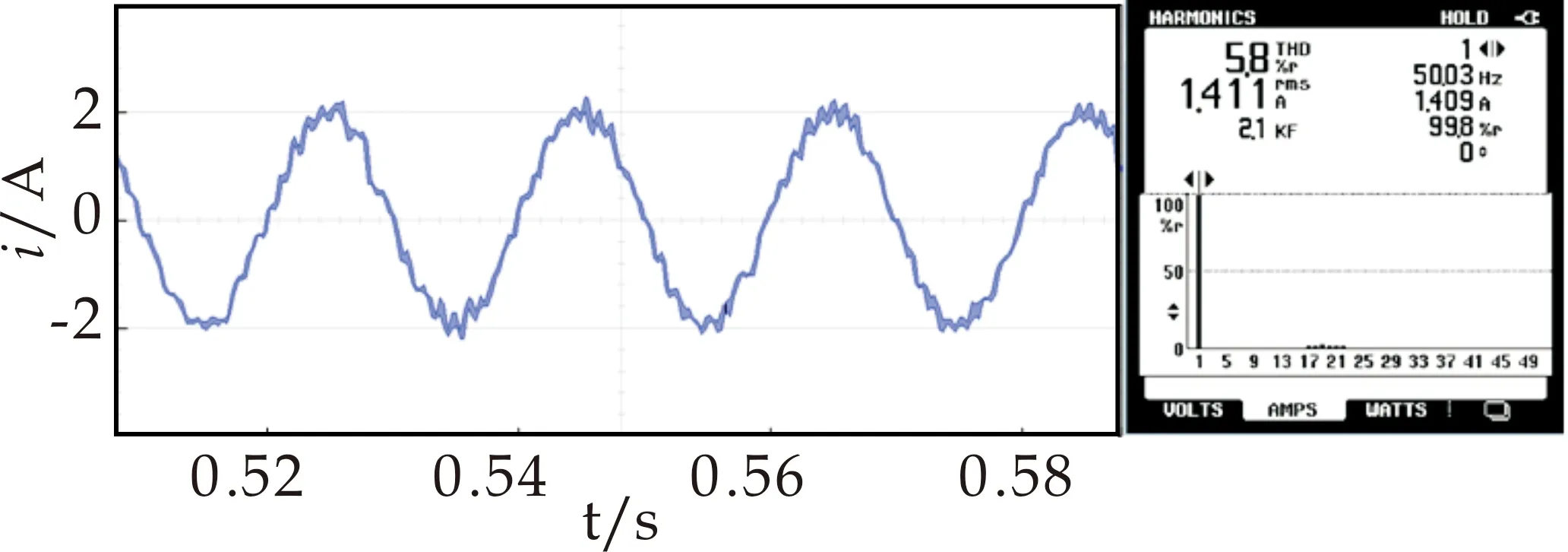
(a)传统算法的a相电流及畸变率
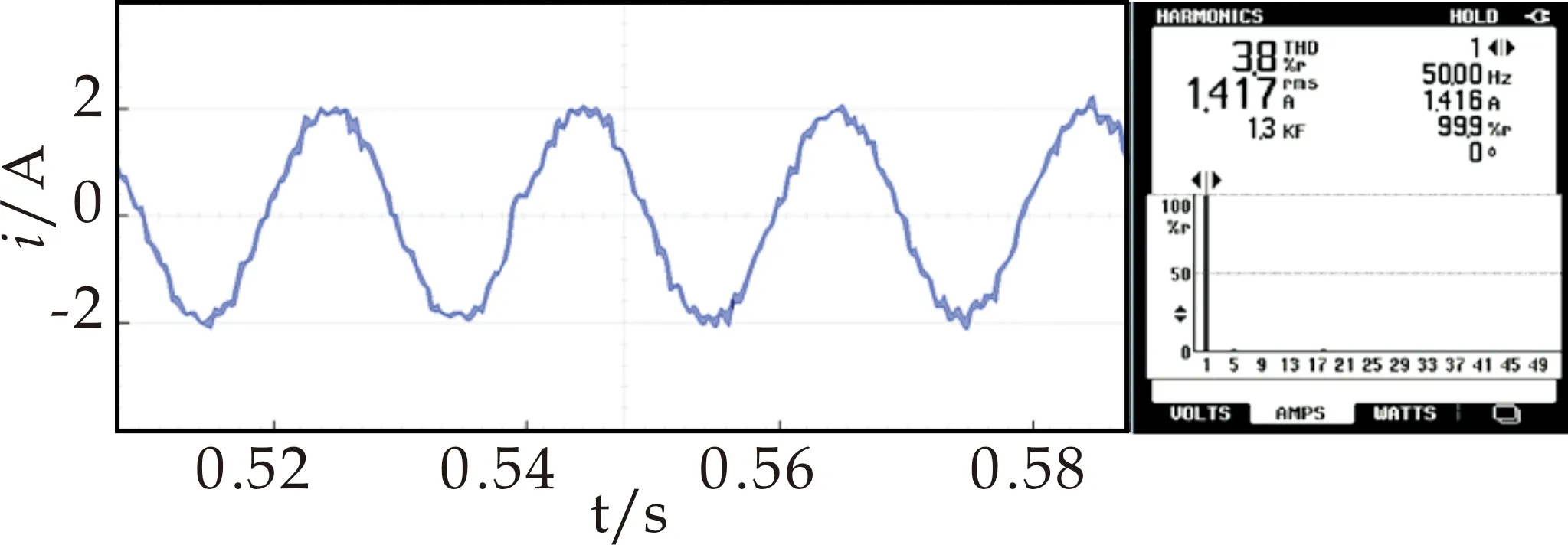
(b)改进算法的a相电流及畸变率图19 a相并网电流及畸变率
5 结论
传统模型预测控制可以根据系统的实际需求改变系统模型、模型参数和评估函数,具有很强的灵活性,但由于开关状态较少和模型参数限制,因此控制精度不高.本文在传统模型预测控制策略的基础上,进行了如下改进:
(1)采用了一种增加两组开关矢量的改进模型预测控制策略,从而减少预测电流的逼近误差.
(2)对滤波电感值进行了实时的预测,将预测的实际电感值代入预测模型中,进一步保证预测模型准确性.
通过仿真和实验验证,该算法既简单易行,又能改善并网电流波形.但由于有限开关矢量数量限制和实验的开关频率较低,对电流波形的改善效果不是十分理想.下一步,将结合有源电力滤波器进行更加深入的研究.
猜你喜欢
电子技术与软件工程(2022年6期)2022-07-07
电源学报(2022年1期)2022-02-25
北京航空航天大学学报(2021年9期)2021-11-02
通信电源技术(2021年9期)2021-09-23
中学生数理化·高一版(2021年11期)2021-09-05
防爆电机(2020年4期)2020-12-14
电源学报(2020年3期)2020-06-28
雷达学报(2018年5期)2018-12-05
汽车维护与修理(2018年9期)2018-10-31
航空世界(2018年12期)2018-07-16