基于智能化综采工作面采煤机的惯导系统的设计与研究
2020-11-23 06:56石成虎付良廷
陕西煤炭 2020年6期
石成虎,付良廷
(西安重装智慧矿山工程技术有限公司,陕西 西安 710032)
0 引言
近年来,在国家大数据战略、互联网+、物联网和煤炭智能化开采等一系列重大战略和行动的引导下,陕煤集团加大智能化工作面应用推广力度,智能化工作面建设取得了可喜的成绩。目前,黄陵一号煤矿和二号煤矿高智能化综采工作面集成有供液、三机监测及远程集中控制系统,可在地面分控中心及井下顺槽监控中心实现对工作面采煤机、刮板机、液压支架、泵站、顺槽皮带等单机设备的远程控制和一键启停,真正做到了“无人值守、有人巡视”[1],走在了煤炭智能开采技术的前沿。山西塔山煤矿、四川广能公司龙滩煤矿等也相继进行了深入研究,并实现了应用和投产,这一系列的大事件标志着远程控制智能化采煤已然成为必然趋势,我国已进入智能化开采时代。
1 国内外研究状况
目前,惯导系统的研究和开发主要用于航天、军事领域,民用类很少,还没有专用于采煤机惯导系统的生产厂家。惯导系统的发展已有几十年的发展历史,积累了相当多的研究基础和丰富的研究经验,但用于煤炭企业采煤机精准定位的惯导系统屈指可数,且效果欠佳,而国外,LASC技术得到了较好的应用和推广,因此,相对而言,我国的技术力量相对薄弱,要研究和开发一套真正用于煤炭企业采煤机精准定位和矫直的惯导系统,困难显而易见,只有不断地磨练自己,不断优化,砥砺前进,克服种种困难,才能守得云开见月明,追赶超越竞争对手。
1.1 国内研究状况
在国内,航天九院13所和中国航空工业集团公司西安飞行自动控制研究所(618所)的惯导系统在采煤机上已有推广,但效果不理想。
2015年,北京天地科技与CSIRO昆士兰技术中心展开了LASC技术合作,并开始在兖煤集团转龙湾矿进行了LASC技术的井下应用,进入市场也比较晚,由于矿井的复杂多样性,其效果相对比较好,还有待于进一步的持续发展,并且价格昂贵,性价比不高。
目前,我国已建成超过220个“有人巡视,无人值守”智能化开采工作面,产量超过5.6亿t,工作面减少人数50%以上。
因此,我国煤炭的智能化开采,尚处于初级阶段,存在许多不足,对矿井智能化综采工作面的安全高效开采提出了更高的技术要求和精度要求,而综采工作面智能化开采的核心问题就是工作面采煤机的精确定位和自动取直,惯性导航技术是实现和解决这一问题的有效方法和途径之一。研究和开发用于采煤机定位、姿态精准检测的惯导系统,成为我国煤炭企业实现远程控制智能化开采的必然选择。
1.2 国外研究状况
20世纪90年代以来,美国、德国、澳大利亚等国开始着手研究自动化综采关键技术,并取得了显著性成果。澳大利亚综采长壁工作面自动控制委员会(Longwall Automation Steering Committee,LASC)开展的煤矿综采自动高精度光纤陀螺仪和定制的定位导航算法获得了3项主要成果,即采煤机位置三维精确定位(误差±10 cm)、工作面矫直系统(误差±50 cm)和工作面水平控制,完成了工作面自动化系统原型,并首次在澳大利亚的Beltana矿试验成功,于2008年对LASC系统进行了优化,实现了采煤机自动控制、煤流负荷平衡、巷道集中监控等,之后便同久益、艾可夫等采煤机供应商签署了协议,将这项技术集成到对应的采煤机上,实现快速商用[2]。目前,在澳大利亚超过20个长壁工作面采用了LASC技术,2014年,在美国首次应用于伊利诺斯州,久益集团White Oak 煤矿。如今,LASC技术在我国进行了应用推广,但价格昂贵,性价比不高。
智能开采服务中心(Intelligent Mining Service Certer,IMSC)是美国JOY公司推出的一种适用于长壁工作面的远程智能增值产品/服务系统,可实时监控煤矿设备运行,在澳大利亚布里斯班的Anglo矿业公司总部设置总高度室,对所管辖矿井进行实时监控,目前只有莫兰巴北矿上线[2]。
2 惯导系统设计与研究
目前业内认可度比较高的智能化无人开采技术其装备总体路线如图1所示,图中粗线框出部分是装备定位及姿态感知在整个体系中的所处位置,采煤机行进轨迹测量是装备定位与姿态感知的重要组成部分。
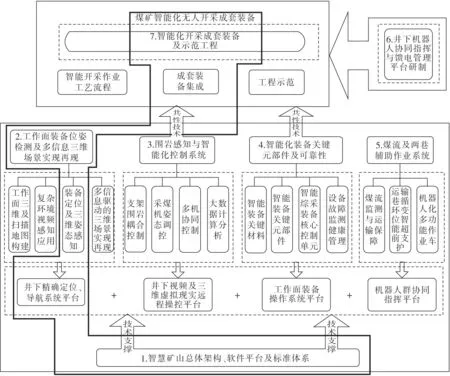
图1 智能化无人开采技术与装备总体路线
基于采煤机的惯导系统设计与研究具体分为2个研究内容,即惯导本体结构设计和航迹生成算法,如图2所示。
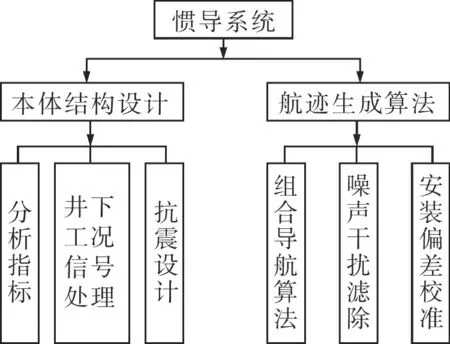
图2 基于采煤机的惯导系统
惯导是生成采煤机航迹数据的传感器部件,也是惯导系统的本体结构。根据对综采工作面的平整度要求,分析系统指标需求并进行详细分解。依据分解后的系统指标,针对采煤机工况条件设计惯导系统的抗震动冲击信号处理算法以及机械抗震动冲击结构,最后,根据系统指标要求以及惯导输出的姿态角度指标,设计系统航迹生成算法,包括有组合导航算法、噪声干扰滤波处理算法、安装误差校准算法等,最终完成系统设计。
2.1 本体结构设计
在自动化综采工作面上,惯导准确获取采煤机定位轨迹,以确保采煤机按照规划好的工作面模型进行作业。
分析指标:通过详细分析系统指标,并建立理论模型。如果综采面工作长度300 m,采煤机一刀煤用时最长1 h,一刀煤期间,采煤机应连续作业,不允许停车修正,采煤机三维定位误差±10 cm,如图3所示。

图3 理论模型
由图可知,0.1/300=tanΔθ,
而Δθ=arctan(0.1/300)≈0.000 333 3(弧度),故0.000 333 3×180/3.14=0.019(度),可得导系统航向保持精度应≤0.019度/h。
航向角是惯导系统精度最难保证的一项关键指标,在同一惯导系统中姿态角(横滚、俯仰)的指标一般优于航向角。
井下工况信号处理:井下信号传输和通讯主要是CAN总线和RS-485总线信号,设计CAN总线和RS-485总线通讯模块,建立数据传输通道,以完成数据采样和通讯功能。
机械抗震动冲击设计:为了增强采煤机惯导系统的稳定运行,机载惯性导航的机械抗震动冲击设计采用了防震、抗冲击加固理念,设计了隔振、缓冲模块,增强了设备及元器件的耐振动、冲击能力。
2.2 航迹生成算法
采煤机惯导系统的算法设计与实现分为以下3个步骤实现。
组合导航算法设计:采用惯导与里程计组合导航的方式完成采煤机航迹生成算法。
噪声干扰滤波算法设计:本研究拟采用卡尔曼滤波对采煤机震动冲击引入的噪声干扰进行滤除,其算法原理如下。
系统状态方程:xk=Akxk-1+wk-1,白噪声为激励,策动噪声
系统量测方程:yk=ckxk+vk
式中,yk—观测信号矢量;vk—观测噪声序列;ck—观测矩阵(m×n)
若不考虑噪声,忽略wk-1,vk的影响时,即令wk-1=0,vk=0,由系统的状态方程和量测方程得到




(9)



(2)=E[(I-HkCk)Qk-1(I-HkCk)T],

最小均方误差阵

=Pk′-HkCkPk′
=(I-HkCk)Pk′
故有Kalman一步递推公式
以上是Kalman递推过程。
统计特性:Ak,CK,RkQ,

以观测数据作估计:
取u0≈E[y(n)]
Var[x0]≈VarE[y(n)]
递推:

安装误差校准算法设计:设计误差校准算法和误差校准通讯模块,当采煤机长时间进行割煤时,惯导形成一个时间累积误差,致使惯导与采煤机的实际运行轨迹形成了累积误差[9-13],因此,惯导系统需要配备误差校准通讯模块,进行误差修正和纠偏,以实现对采煤机实际运行轨迹和状态的精准测量。
3 结语
将高精度惯导系统应用于煤炭智能化综采工作面的煤炭开采中,进行采煤机位置、姿态的精确监测和取直,通过对每个液压支架推移行程单独闭环控制来达成直线度控制目标,以保证综采工作面连续生产过程中不需要人工调架[3-8],达到提高生产效率和安全性的目的,从而进一步推动矿井远程控制智能化采煤的进程,加快智慧化矿山的建设步伐,具有非常重要的现实意义。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年1期)2022-02-16
河北画报(2021年2期)2021-05-25
煤矿现代化(2021年3期)2021-05-21
煤炭工程(2021年3期)2021-03-26
数字海洋与水下攻防(2020年5期)2021-01-04
煤矿机电(2019年6期)2020-01-13
陕西煤炭(2020年1期)2020-01-09
电子技术与软件工程(2019年15期)2019-12-03
北京航空航天大学学报(2018年1期)2018-04-20