基于四元数的三维坐标转换在大型LNG钢结构工程建造测量中的应用
2020-11-20 02:07葛仁磊李家军杨现阳
海洋工程装备与技术 2020年4期
葛仁磊,李家军,杨现阳,张 健
(海洋石油工程股份有限公司,青岛 266520)
0 引 言
在高精度大型工程测量中,建造坐标系往往基于自身的局部参考坐标系,与设计安装坐标系不统一,会影响工程建造质量和进度[1-2],需要进行三维坐标转换实现建造坐标系和安装坐标系的统一。传统的三维坐标转换模型一般用欧拉角构建旋转矩阵,计算过程复杂[3-5],四元数几何意义明确,计算速度快,可表示所有旋转,无奇异值[6],非常适合空间大角度三维坐标转换计算。本文基于单位四元数构造旋转矩阵,引入最小二乘原则,实现了高精度大型LNG钢结构甲板片建造坐标系与安装坐标系的统一。与传统计算方法相比,该方法可快速实现三维坐标高精度转换,提高工程建造速度和精度。
1 四元数基本介绍
三维空间的旋转用四元数可表示为[7]
q=w+xi+yj+zk
(1)
其中:
(2)
四元数旋转公式为
(3)
2 基于四元数的最小二乘坐标转换
点Fi和Di的坐标关系可由旋转矩阵R和位移矢量T表示:
(4)
利用四元数法可以方便地求解出旋转矩阵R,根据式(3),令
w2+x2+y2+z2=1
(5)
将式(5)代入式(3)并整理,得
(6)
w、x、y、z除了满足限制条件式(5)外,将式(6)代入式(4),得到误差方程:
即
(7)
式(6)中共有w、x、y、z、Tx、Tx、Tx7个参数,且有一个限制条件:w2+x2+y2+z2=1,w≥0。本文使用基于最小二乘的条件平差进行解算,由于误差方程(7)并不是线性函数模型,需要对函数模型进行线性化后迭代解算,初始值的先验估计可使用任意三点进行。
3 实例应用及分析
本文以海洋石油工程股份有限公司在建某大型高精度LNG钢结构甲板片建造为例,该甲板片结构模型及设计坐标如图1所示,尺寸为32 m×40 m,结构轴线为4 m×5 m,共20个关键节点,各节点坐标公差要求为±5 mm。施工现场测量数据利用徕卡TS30全站仪,采用自由定向测量获取,测量点分布如图2所示,各点坐标值和对应信息如表1所示。
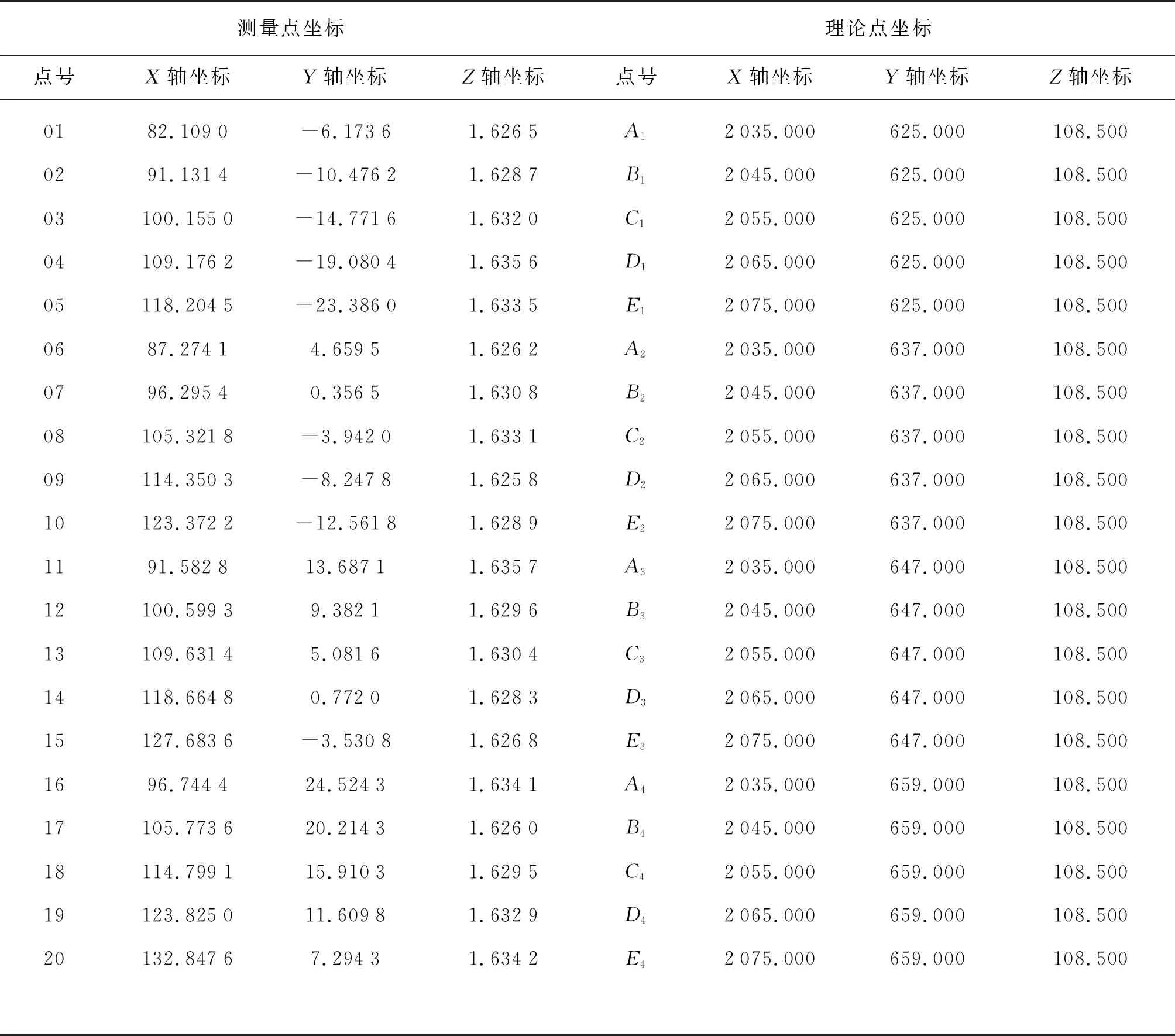
表1 L1-1测量点及理论点坐标 (单位:mm)

图2 测量点分布
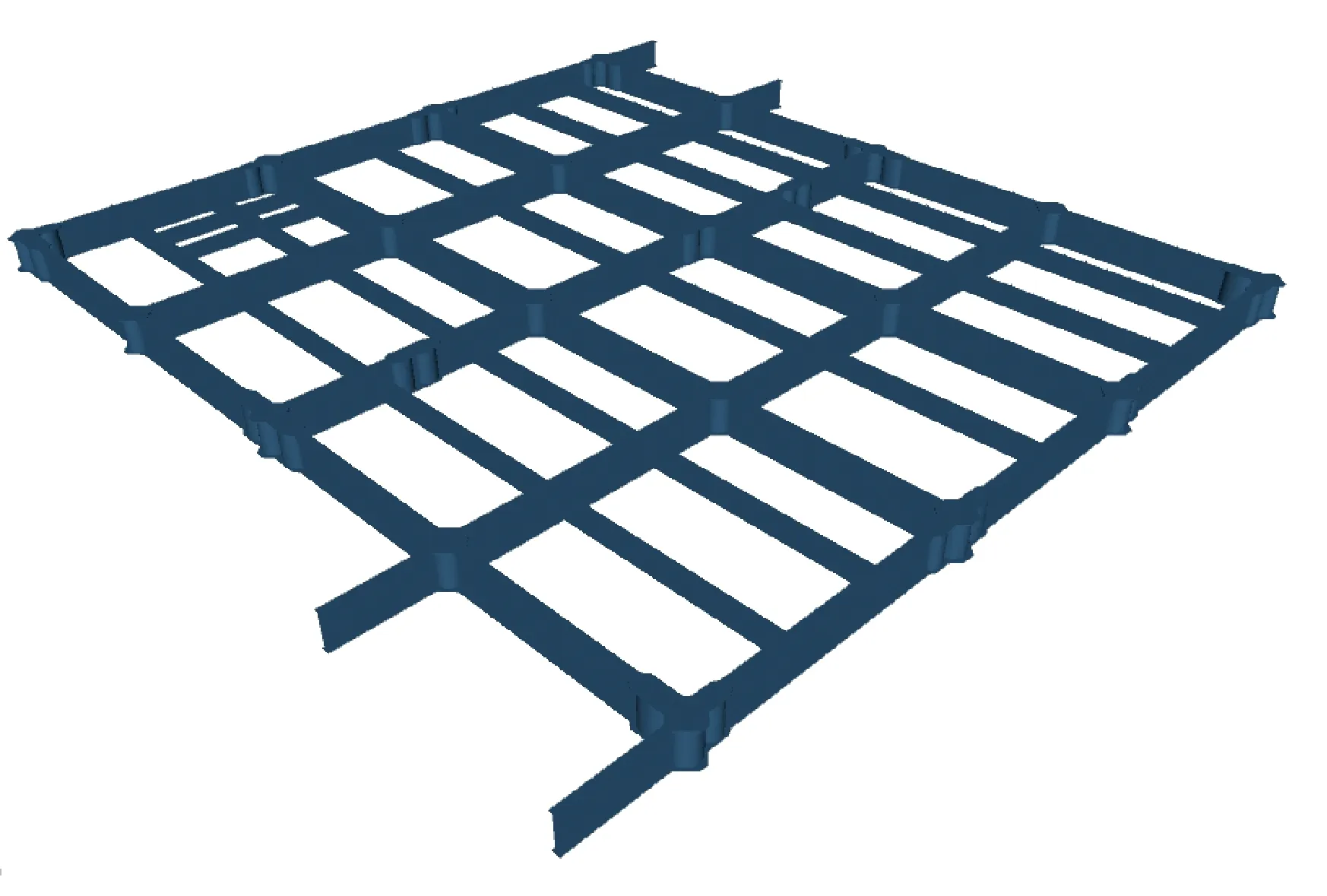
图1 甲板片结构模型及设计坐标(单位:mm)
各理论点坐标为图纸设计坐标,测量点坐标由于采取自由定向测量,导致理论点坐标与测量点坐标之间产生空间旋转,但各测量点与理论点空间上保持一一对应。
3.1 数据计算
3.1.1 传统方法计算
传统计算方法:先计算甲板片水平,再进行水平面投影,以甲板片四条边的中心点为原点建立基于自身的局部参考坐标系,计算各节点偏移。该方法使用条件:需将甲板片水平调至公差范围内,否则会导致尺寸、偏移数据因投影计算而失真。
计算结果如图3所示,甲板片水平值为-63~+62 mm。除C2和D1节点外,皆不符合公差要求,各节点偏移数据中有4个节点Y方向偏移值超出公差要求。按照此计算方法,该甲板片需要调整为水平状态,重新采集数据进行计算,但甲板片尺寸巨大,吨位重,施工调整水平存在较大困难,须耗费大量时间和人力物力,易引起结构变形等质量问题和施工进度。
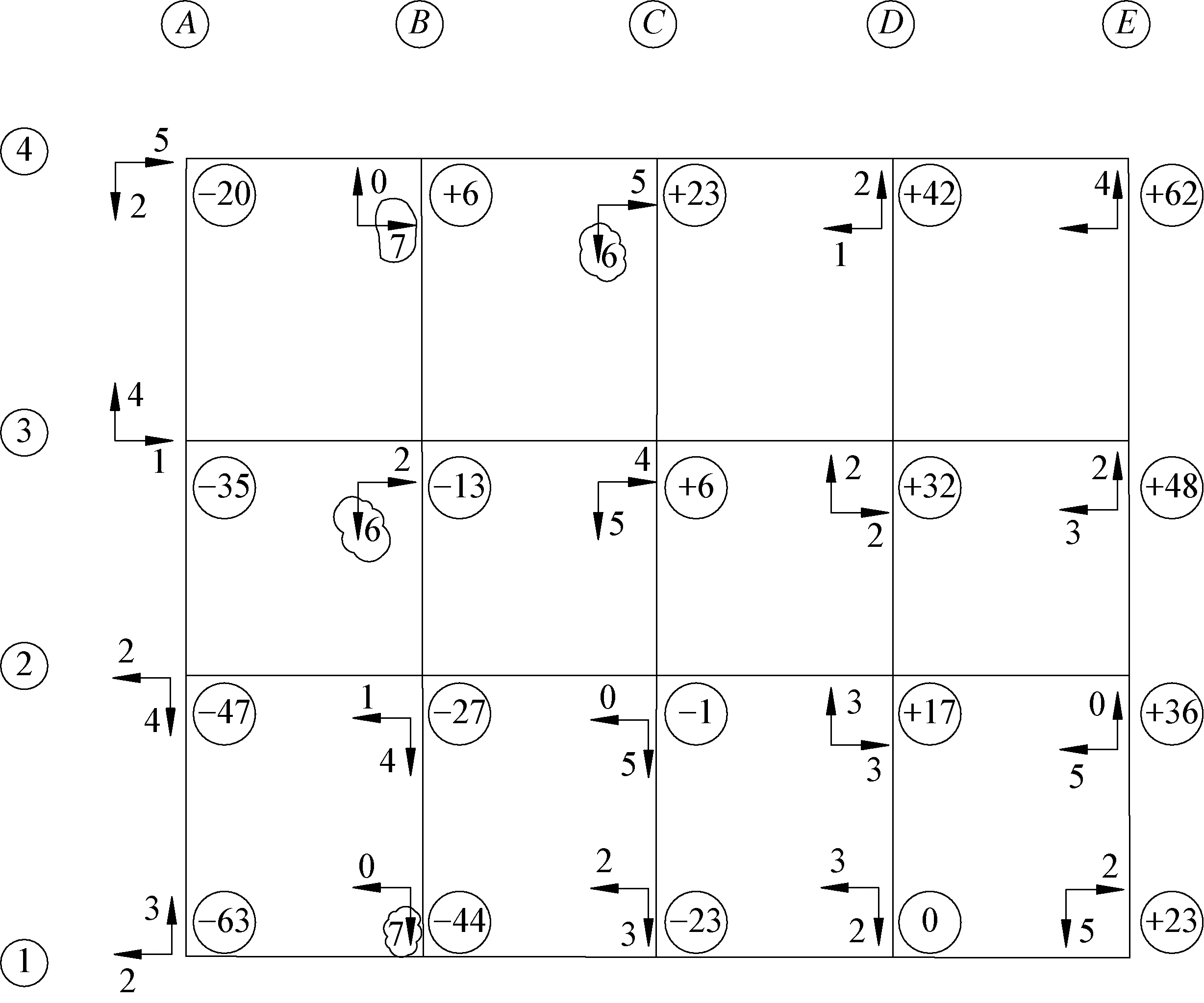
图3 传统方法甲板片计算结果(单位:mm)
3.1.2 基于四元数的最小二乘坐标转换计算
首先,基于最小二乘原则进行七参数的迭代计算,可以按照如下步骤进行:
(1) 将误差方程(7)线性化(具体方法见参考文献[9])。
(2) 进行初始值估计(任意选择三个点,在本例中使用1、2、3号点进行初始值估计)。
(3) 将初始值代入步骤(1)中线性化后的误差方程,并求得七参数据的变化值Δ。
(4) 将初始值与Δ相加,求得最新初始值。
(5) 重复步骤(3)和(4),直至Δ的值很小,达到旋转精度。
计算结果如表2所示,由表2可知,经过六次迭代计算后,各参数的精度可达到亚毫米级,已经超过全站仪的测量精度,满足计算要求。

表2 七参数计算结果
将得到的七参数进行甲板片各节点数据拟合计算,结果如图4所示,可知各节点水平值为-3~+4 mm,满足公差要求,各节点偏移值皆在5 mm以内,满足公差要求。
3.2 数据对比分析
将图3和图4的数据进行对比计算,如表3所示。

图4 计算结果(单位:mm)

表3 传统方法与四元数法精度对比
由表3可知,采用基于四元数最佳拟合后的数据皆符合公差要求,并且X方向、Y方向和水平值的平均值和均方根值皆大幅降低。原因是采用四元数方法计算时,能够拟合最佳平面,避免了水平调整的巨大工作量,并且该方法以安装坐标系为基准,将拟合误差均匀分配至各点,克服了局部坐标系与甲板片安装坐标系不一致问题,提高拟合计算精度。
为了充分验证基于四元数最佳拟合算法的正确性,总装阶段针对实验模块进行了充分的调整,最终结果如图5所示,与四元数最佳拟合得到的结果(见图4)高度一致,充分说明了该算法的正确性与可用性。
4 结 语
四元数法是一种非常简洁有效的描述物体转动的工具,几何意义明确、计算简单、拟合精度高,是高精度大型工程测量数据计算中最常用的拟合方法之一。本文基于四元数的最佳拟合法,实现了甲板片各节点施工坐标系和安装坐标系之间的统一。与传统计算方法相比,将误差均匀分配至各拟合点,基于四元数的最佳拟合法可大大提高工程施工建造的进度和精度,提高工程测量数据处理的自动化程度,对提高数据的可靠性与规范性、最佳拟合法的编程实现及工程应用都具有很好的指导意义。
猜你喜欢
航空学报(2022年5期)2022-07-04
汽车实用技术(2022年7期)2022-04-20
船舶标准化工程师(2020年1期)2020-06-12
船舶标准化工程师(2020年1期)2020-06-12
模具制造(2019年10期)2020-01-06
中学生数理化(高中版.高考数学)(2019年10期)2019-11-08
科学导报·科学工程与电力(2019年5期)2019-10-20
自动化与仪表(2019年2期)2019-03-06
国防(2017年12期)2017-04-09
中国船检(2013年11期)2013-08-15