预制仰拱边箱涵吊机设计及应用研究
2020-11-19 07:41章远方
国防交通工程与技术 2020年6期
章远方
(中铁第五勘察设计院集团有限公司,北京 102600)
1 工程概况
仰拱施工通常采用现浇方法进行施工。在隧道掌子面施工的同时,后方一般采用仰拱模板台车配合施工,尽早使隧道形成闭环结构,达到“早封闭”原则[1-2]。目前,在国内铁路隧道施工中,仰拱一般采用现浇方案,存在工序繁杂、施工效率低、施工质量难以保证等问题。为保证隧道内混凝土施工质量,提高隧道使用寿命,工厂化预制、现场装配成为主要手段之一。国内外科研工作者对隧道内预制拼装技术进行了大量研究[3-7]。
清华园隧道是国内第一座采用仰拱预制拼装技术的大直径高铁盾构隧道,是北京地区直径最大的盾构隧道,盾构隧道内径11.1 m,外径12.2 m[8-9]。隧道仰拱不再采用现浇方式进行施工,而是将仰拱分成两种箱涵结构(中箱涵和边箱涵),两种箱涵采用螺栓进行连接,通过浇筑混凝土使箱涵结构和隧道管片形成一个整体。箱涵结构全部采用工厂预制,在盾构掘进过程中,中箱涵作为物料通道,必须跟随管片掘进进行施工。边箱涵与中箱涵不能同时施工,因此,研发了一种隧道边箱涵预制拼装设备。边箱涵吊机起重小车上安装有4台电动葫芦,负责边箱涵的吊运,同时完成边箱涵吊装工作。4个电动葫芦可以同时起升,也可以分开单个起升,单动能够将吊具及边箱涵调整姿态,适应于多种拼装工况,实现边箱涵的快速自动拼装,降低边箱涵施工风险,能够大大提高施工效率。
2 预制仰拱边箱涵施工
2.1 隧道仰拱预制箱涵
清华园盾构隧道预制仰拱块分为3部分,分别是中箱涵,两侧边箱涵,如图1所示。中箱涵由盾构机进行铺设,边箱涵采用运输车运输至安装位置,由边箱涵吊机进行吊运和对位安装[10-13]。边箱涵自重约11.5 t,其尺寸见图2所示。
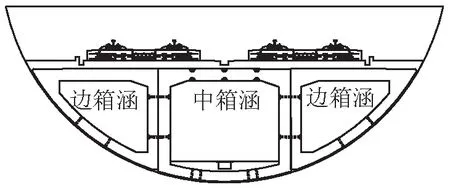
图1 隧道预制仰拱断面布置图

图2 边箱涵尺寸图(单位:mm)
2.2 仰拱箱涵施工技术
中箱涵在盾构施工过程中,盾构机后配套箱涵吊机完成中箱涵的铺设,在盾构掘进过程中,中箱涵作为物料通道,必须跟随管片掘进进行施工。边箱涵与中箱涵不能同时施工,应该错开一个施工循环。中箱涵通过螺栓连接到管片上,边箱涵与中箱涵、管片通过螺栓连接,从而三部分形成一个整体。
3 预制仰拱边箱涵吊机设计与应用
为实现盾构机后方边箱涵快速对位安装、提高仰拱施工效率,研究一种适应隧道内高低错位行走方式的边箱涵吊机。边箱涵吊机设计关键技术主要包括:高低腿结构形式、高腿弧面走行系统、四点起吊调节边箱涵姿态和U型吊具结构等。
3.1 边箱涵吊机结构组成
边箱涵吊机主要由主结构、起重小车、可旋转U型吊具、走行系统和箱涵件调整定位机构等组成。边箱涵吊机三维效果图见图3所示。
3.1.1 主结构
主结构采用一高一低支腿形式,前支腿采用折弯结构,以适应隧道弧面行走工况,同时在前支腿上设置导向轮,以中箱涵作为参考,保证箱涵吊机走行对中。后支腿走行在已铺设完成的边箱涵上。该走行机构能够适应隧道弧面走行工况,保证箱涵吊机走行对中,并且不会发生前倾危险。当防走空轮处于无支撑状态时,整机会立即断电,使行走处于无动力状态。
3.1.2 起重小车
起重小车采用四点起吊方式,每个电葫芦吊钩和下部吊具旋转吊架连接。起重小车走行系统通过挂轮挂在工字梁上,通过齿轮、齿条驱动实现左右移动。起重小车上安装有4个5 t电动葫芦,负责边箱涵吊运工作,见图4所示。4个电动葫芦可以同时起升,也可以分开单个起升。
3.1.3 可旋转U型吊具
可旋转U型吊具包含上部旋转吊架和下部U形架,见图5所示。U型架能够旋转90°,旋转到位后自动停止,实现侧箱涵和中箱涵的对位安装。吊具吊住边箱涵后,能够自动加紧。吊具起升过程中,起吊高度超高后系统自动防止冲顶。

图3 边箱涵吊机三维效果图 图4 起重小车布置图 图5 可旋转U型吊具
3.1.4 走行系统
走行系统采用无轨行走,四驱动力,保证运行平稳,前走行系统行走在管片上,能够完美贴合管片弧度,结构受力合理,行走过程运行平稳。后走行系统行走在拼装后的边箱涵,安装有防落空装置,避免人员操作失误导致后腿落空。
3.2 边箱涵吊机主要技术参数
起重量12 t(不含吊具),吊具3.5 t;吊运系统起升速度0~7 m/min;小车行走速度0~10 m/min;大车行走速度0~10 m/min;行走轮中心距5.6 m。
3.3 边箱涵吊机结构有限元计算
为保证边箱涵吊机结构要求,对边箱涵吊机主结构进行有限元分析。采用有限元软件MIDAS/Civil对边箱涵吊机主结构进行有限元分析,边箱涵吊机主结构有限元模型见图6所示。
由于实际有效悬臂长度只有165 mm,其悬臂变形可忽略不计,所以结构计算时,只考虑边箱涵吊机在跨中起吊时工况。变形和应力云图见图7、图8所示。跨度中央垂直挠度为f=4.3 mm<5 600/1 000 mm=5.6 mm,σ=44.7 MPa<[σ]=235/1.5 MPa=156 MPa。所以,边箱涵吊机结构变形和受力满足规范要求,能够满足施工安全要求。
3.4 边箱涵吊机现场应用
边箱涵吊机在隧道内工作状态见图9所示。在施工中,由于吊具和隧道内管线存在一定干涉,见图10所示。在施工时,将吊具拆除,见图11所示。通过在边箱涵表面的吊孔安装吊耳,实现箱涵的对位安装。从实际施工看,边箱涵吊机吊具后期需要优化设计,避免和隧道内管线发生干涉。

图6 边箱涵吊机主结构有限元模型 图7 边箱涵吊机主结构变形云图 图8 边箱涵吊机主结构应力云图

图9 边箱涵吊机工作状态 图10 边箱涵对位安装时干涉情况 图11 边箱涵对位安装
由于设计中,未考虑“四点起吊,三点平衡”,很容易造成电葫芦超载严重作业等危险工况,所以对旋转吊架进行了优化设计,见图12所示。在U形吊具上部旋转吊架一侧支撑梁设计一根均衡轴,使一侧行成两点单独起吊、一侧两点同时起吊,从而使起吊系统行程“四点起吊,三点平衡”。

图12 旋转吊架结构优化设计
4 边箱涵吊机的应用
(1)走行轮系采用橡胶大直径轮胎,承载能力大。橡胶大直径轮胎行进过程中运行平稳,能够顺利越过管片或箱涵件的错台,环境适应性强。行走轮系采用四驱大扭矩驱动系统,同时驱动系统全部加变频器进行调速,以确保启动和走行平稳。同时驱动系统具有电磁制动功能,能够实现行走轮系的稳定可靠制动。
(2)边箱涵吊机行走功率满足隧道内30‰坡度施工要求。
(3)边箱涵吊机行走轮系具有微动转向,适用于隧道弯曲施工环境。
(4)边箱涵吊机前轮设计有侧向定位装置,保证边箱涵吊机位置保持在隧道中心。
(5)边箱涵吊机行走轮可快速调整,实现转换至平面行走的要求。
5 结束语
京张高铁清华园隧道仰拱采用预制拼装技术,能够有效地在复杂盾构隧道环境下实现快速施工的要求,避免了在盾构机后方大量现浇混凝土产生的环境污染。采用边箱涵吊机进行箱涵的吊运和安装,能够有效地提高边箱涵和中箱涵的安装精度,同时边箱涵吊机下方可通过物流车,不会对其他物料运输发生干涉。
猜你喜欢
中国应急管理科学(2022年1期)2022-04-18
湖南水利水电(2021年6期)2022-01-18
沈阳大学学报(自然科学版)(2021年5期)2021-10-15
铁道建筑技术(2021年4期)2021-07-21
铁道建筑技术(2021年4期)2021-07-21
城市道桥与防洪(2019年5期)2019-06-26
西南交通大学学报(2018年5期)2018-11-08
沈阳大学学报(自然科学版)(2018年4期)2018-08-27
中国公路(2017年19期)2018-01-23
中国公路(2017年14期)2017-09-26