
陀螺稳定平台数字稳定电路硬件设计与实现
2020-11-17 07:27党宏涛许孝敏杨建业谢阳光陈明淑
导航定位与授时 2020年6期
党宏涛,许孝敏,杨建业,谢阳光 ,陈明淑
(1.西京学院理学院,西安 710123; 2.中国航空工业集团公司西安飞行自动控制研究所,西安 710065)
0 引言
国外早期的惯性系统主要是基于转子式陀螺的平台惯导系统,在其关键的平台稳定回路中,自适应控制等先进控制理论和数字化、智能化控制技术得到成功应用,平台系统精度及综合性能大幅提高[1]。在文献[1]中,王巍院士在“惯性系统技术发展趋势及展望”中提到“平台式惯性系统需充分利用最新控制理论和控制技术来进一步改善其稳定回路的性能”。文献[2-3]对惯性陀螺的基本原理及模拟电路进行了叙述,是平台稳定回路数字化设计的基础。文献[4]对挠性石英加速度计的输出进行了A/D转换电路的设计,提高了电路精度,具有很好的工程应用价值。文献[5]运用SI技术对惯性导航系统的数字电路进行了设计,有效缩短了高速电路的研制周期,降低了研制成本。文献[6-10]中设计了典型的高精度数据采集电路,具有重要的参考意义。很多文献已对平台数字回路的建模和控制算法的设计等进行了系统的研究。文献[11]对稳定平台系统进行了建模,并进行了比例积分微分(Proportion Integration Differentiation,PID)控制算法设计,使用PID算法对系统的快速性和稳定性进行调节,并对PID算法进行了仿真。文献[12]提出了采用以编码器进行数字测速构成速度内环、利用速率陀螺构成速度外环的双速度环复合控制方案。文献[13]设计了跟瞄平台俯仰回路的稳定控制的模糊控制器;为了消除陀螺稳定平台系统中各框架间的耦合影响,文献[14]设计了一种滑模非线性解耦控制算法;文献[15]针对速率稳定回路的校正环节设计中的超前滞后校正抗干扰性能差的缺陷,提出了两种控制方法,改善了高阶系统的动态性能。但数字硬件电路是各种算法能很好实现的基础,基于此,本文针对某型陀螺稳定平台目前仍采用模拟稳定电路的问题,设计并实现了陀螺稳定平台数字稳定电路,主要研究了平台数字稳定电路的硬件实现问题。
1 总体设计思想
系统主要由模拟量采集、信号处理及功率放大三部分组成。具体电路包括电源电路、数字信号处理(Digital Signal Processing,DSP)电路、高精度模拟数字(Analogto-Digital,AD)采集电路、脉冲宽度调制(Pulse Width Modulation,PWM)驱动电路等,为后续各种先进控制理论在数字回路中的应用奠定基础。数字稳定回路驱动器使用了DSP平台为核心控制器件,数字稳定回路由控制部分和功率部分组成,功率部分为一个H桥拓补电路,受以DSP28335为核心控制器件的控制部分控制;控制部分包含1路PWM输出、1路RS232通信口、1片256K×16的SRAM、1片256K×16的FLASH、8路ADC单端输入以及4路ADC差分输入。其中PWM信号经过高速光耦后被传输到H桥的4个开关管,通过调节PWM脉冲宽度进而调节直流母线经过H桥输出的电压。
2 数字稳定回路硬件设计与实现
2.1 电源电路
+28V的直流电通过电源电路后,变换出多路直流电压供给DSP处理电路、AD采集电路及PWM驱动电路,电源电路原理如图1所示。

图1 电源电路原理图Fig.1 Power supply circuit schematic diagram
2.2 DSP处理电路
DSP为TMS320F28335PGFA ,SARAM(片内34K×16位、片外256K×16),FLASH(片内256K×16、片外256K×16),PWM输出,带JTAG调试口。DSP处理电路原理图如图2所示。
2.3 AD采集电路
5V供电,ADS1256+低通滤波器+TI高性能基准源芯片+低压差低噪声稳压芯片,8通道单端、4通道差分输入,测量范围(±5V、±2.5V、±1.25V、±0.625V、±0.3125V、±0.1563V、±0.0781V),增益可调(1、2、4、8、16、32、64),采集精度0.00001,采集速度30kSPS。AD采集电路原理图如图3所示。
2.4 PWM功放电路
输出电压28V,1通道,输出功率可以控制5A以内的直流负载(直流力矩电机,线圈阻值9~12Ω),原理框图如图4所示。

图2 DSP处理电路原理图Fig.2 DSP processing circuit schematic diagram

图3 AD采集电路原理图Fig.3 AD acquisition circuit schematic diagram

图4 PWM功放模块原理框图Fig.4 PWM power amplifier module principle block diagram
由S1、S2、S3、S4组成H开关,4个开关由电子元件构成,通断由功率驱动器驱动控制,S1、S4为一组,S2、S3为一组,2组开关不同时工作,控制力矩电机的电流方向,从而控制相应框架轴的力矩方向。
当输出信号为0时,PWM方波正负脉冲宽度相等,流经直流力矩电机的平均电流为0,电机产生力矩亦为0。当功放输入信号为正时,输出方波正负脉冲宽度差动地变化(脉冲重复频率不变),平均电流为正,力矩电机产生正力矩;反之则为负。
图5所示为PWM功放电路原理图。
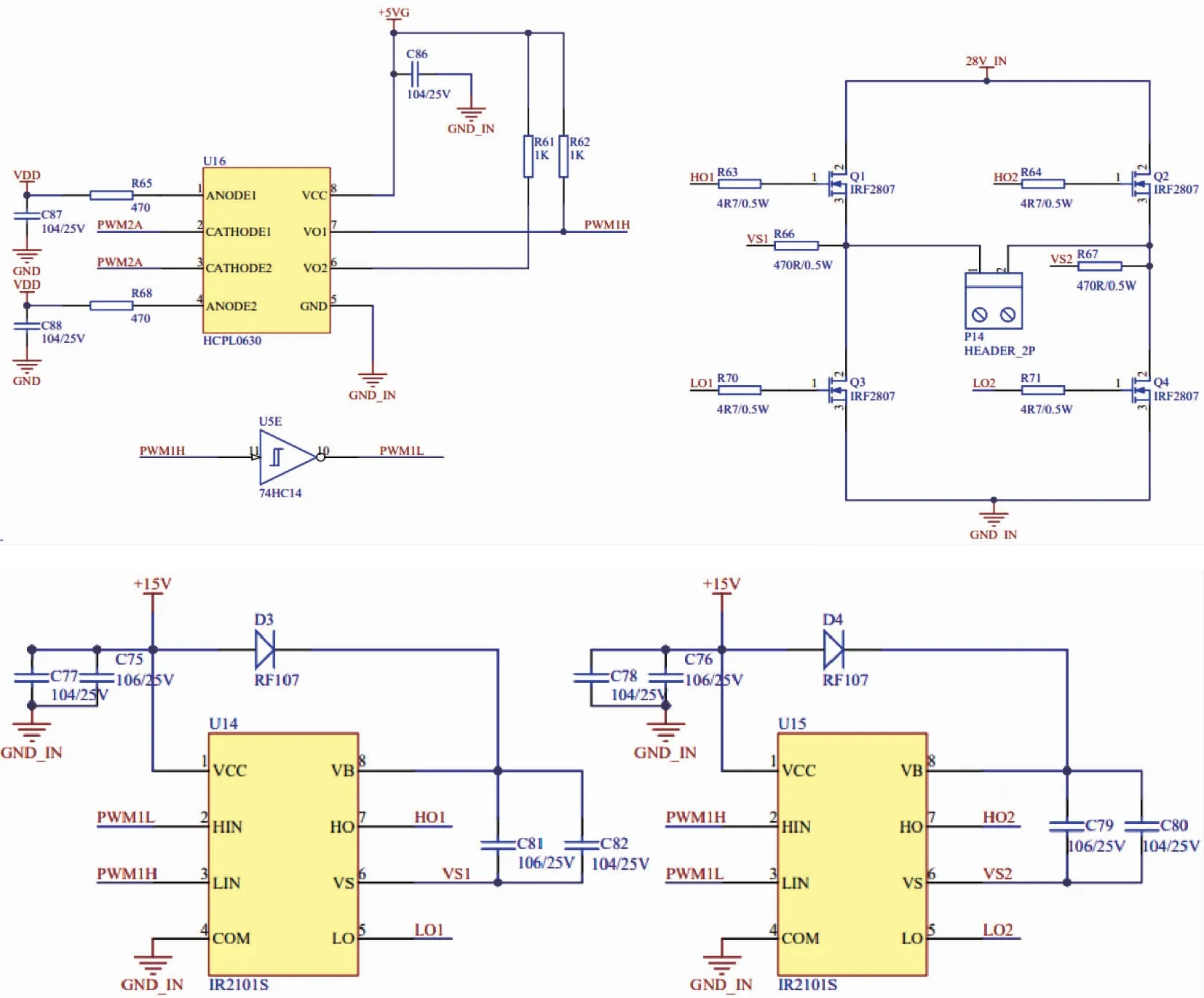
图5 PWM功放电路原理图Fig.5 PWM power amplifier circuit schematic diagram
3 实验及结果分析
对数字稳定回路的各个模块分别进行测试。测试内容包含以下几个部分:1)SRAM和FLASH测试;2)ADC输入;3)RS232测试;4)H桥调制电压测试。图6所示为实物图及测试现场。

(a)实物图

(b)测试现场图6 实物图及测试现场 Fig.6 Photo of the circuit board and test site
将JTAG连接线插入JTAG1口,然后给数字稳定回路通电,编写程序对SRAM和FLASH进行测试。测试先将SRAM和FLASH中的数据全部清零,然后依次向存储区写入数据,每个数据相较于前一个数据自增1,测试结果如图7和图8所示。

图7 FLASH测试结果Fig.7 Flash test results
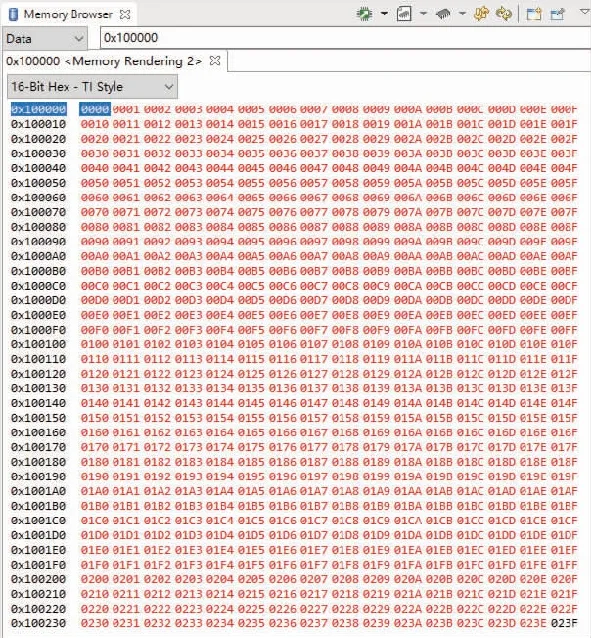
图8 SRAM测试结果Fig.8 SRAM test results
测试完SRAM和FLASH之后,继续对ADC进行测试,测试ADC使用的是外部高精度基准电压,电压值为3V,ADC通过P9接口输入,此接口为单端输入。测试结果显示,ADC测量出的电压为2.99691391V,如图9所示。

图9 ADC单端输入测试结果Fig.9 ADC single input test results
数字稳定回路上还有4路差分ADC输入,同样使用的是外部高精度基准电压,电压值为3V,对其进行测试,其中一路测试结果记录如图10所示。

图10 ADC差分输入测试结果Fig.10 ADC differential input test results
数字稳定回路驱动器使用了RS232通信,通信接口为RS1,此测试只是简单测试了驱动器的通信功能,实现驱动器返回上位机发出的信息内容。使用串口线将驱动器和串口相连,将程序下载到驱动器之后运行,同时打开上位机,选择一致的通信参数进行数据发送,上位机成功收到了返回的数据。测试结果记录如图11所示。
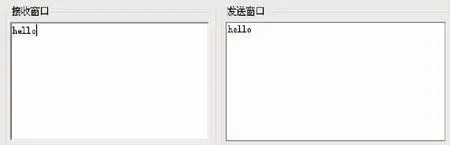
图11 RS232测试结果Fig.11 RS232 Test Results
PWM是电机驱动器中必不可少的脉冲控制信号,用于控制MOS管的开通和关断。在数字稳定回路中,PWM经过高速光耦后传递给MOS管驱动芯片。测试过程中,对主控制器DSP进行编程,产生一路100Hz,占空比为50%的PWM信号,然后用外用表测量P14口的输出,测试结果为±13mV,满足H桥计算理论结果。
4 结论
本文初步探索研究了某型陀螺稳定平台数字稳定电路,用数字稳定电路替代原有平台的模拟稳定电路。设计并实现了基于DSP的硬件电路,包括电源电路、24位高精度AD采集电路、DSP处理电路、H桥功率放大电路等。实验结果表明,该硬件电路能满足各种性能指标要求。本文的研究成果为后续自适应控制等先进控制理论和数字化、智能化控制技术在陀螺稳定平台稳定回路中的成功应用奠定了硬件基础。
猜你喜欢
北华大学学报(自然科学版)(2021年3期)2021-07-13
电脑爱好者(2020年6期)2020-05-26
小学生学习指导(低年级)(2019年10期)2019-10-16
科学导报·学术(2019年44期)2019-09-10
学生天地(2019年6期)2019-03-07
祖国(2017年22期)2018-01-02
科学与财富(2017年29期)2017-12-20
中国信息化周报(2017年4期)2017-03-23
故事作文·高年级(2016年6期)2016-06-21
科学家(2015年12期)2016-01-20
