
破冰船护航条件下的船舶安全域划分方法*
2020-11-13 02:00张伟斌邓雨亭邹紫瑶冯姚瑶
交通信息与安全 2020年3期
张伟斌 邓雨亭 邹紫瑶 冯姚瑶
(南京理工大学电子工程与光电技术学院 南京210094)
0 引 言
随着冬季的到来,高纬度海域往往会结冰,对该海域的船舶航行安全造成影响。冰冻期间需要破冰船开辟航道,普通运输船才可以航行。因此破冰船援助是冬季冰区海域航行普遍采用的一种方法,破冰船的护航是冬季航行的关键措施。Valdez Banda[1]等指出在护航行动通常由破冰船作为先导船只,后跟随一艘或者多艘普通船只。由于跟随的船只与破冰船的距离通常较近,且破冰船收到海冰阻碍,可能会减速或者停止,从而导致与跟随船舶碰撞事故的发生。在破冰船护航过程中,这类事故经常发生。Kum 等[2]研究表明,船舶在冰区航行相比开阔水域有更高的风险。为了对海事风险进行评价,严新平等[3]研究出关于船舶的海事风险评价框架,同时从航行策略的角度对海上运输安全进行分析[4]。Fu等[5]并对北极冰区船舶航行风险的影响因素进行了分析。
海上船舶碰撞是一种典型的频发水上交通事故[6]。由于极地冰区通航环境复杂多变,破冰船护航下的船舶碰撞事故更为突出。在分析冰区水域的碰撞和破冰船护航方面,Goerlandt 等[7]研究表明短距离和高速是危险产生的主要因素。Weng等[8]对船舶域和开放水域或港口条件下的安全距离进行了研究。Fujii等[9]首先提出了安全域的概念,并且将其定义为正在“航行的船舶周围的域”,大多数跟随船舶都不会轻易进入。Topaj 等[10]介绍了在非平稳冰区条件下单船和破冰船辅助冰区路径优化问题的制定,并将破冰船协助视为整体路线优化问题的组成部分,使用经济标准来优化船舶路线和破冰船参与量。近年中国海事局发布《东北航道北极航道航行指南》,对护航船与破冰船之间的安全距离作出了建议。Zhang等[11-13]基于AIS系统获得的数据在破冰船护航作业的背景下做了一系列研究,基于与车辆跟随现象相似的特点,提出了船舶跟驰模型。这种船舶跟驰模型解释了船舶间保持适当安全距离以避免碰撞的必要性,以及海冰对破冰船护航操作的影响。而后进一步提出了破冰船护航作业的多船跟驰模型。该模型根据冰的厚度、类型、弯曲强度以及带领船队的破冰船的主要尺寸来确定冰的阻力。在最新的研究中建立了新的考虑通信条件的船舶跟驰模型,能准确地预测尾随船舶的航速变化,可有效降低在冰覆盖水域航行的船队的风险。
全球航运的发展无疑对海上航行的安全提出了更高的要求,然而高纬度的冰区航运风险的研究没有开阔海域成熟。基于开放海域的背景下Zhang等[14]根据相遇船舶间速度距离以及航向角等的变化来评估碰撞的风险等级,从而保证航海安全。而船舶航行在冰区的风险较高,其中在破冰船领航的情况下所形成的船队跟驰行为存在船舶安全航行的风险。这些表明迫切需要一些方法来进一步保障冰区航行安全,但目前尚缺乏这方面的研究。船舶在冰区航行时,沿着破冰船开辟的航道航行,船舶间的距离较近。如果船舶航行的间距和速度没有保持合理,当受到海冰阻碍时,碰撞风险就会增加。所以建立合理的距离和速度关系对于船舶冰区航行安全有着重要的作用。
本文提出的安全域划分方法可对船舶航行数据进行分析,得到不同冰况下包括船舶间距离和速度之间制约关系的数据集,而后采用EM算法进行船舶安全域的划分。该算法属于无监督学习算法,对于处理包含未知目标的数据具有较好的分类结果。本研究的数据来自于AIS 系统(automatic identification system)。
1 安全距离定义与分类方法
1.1 最小静态安全距离
船舶在冰区跟驰航行过程中后船保持一定的距离跟随前船航行,船舶之间的距离和速度存在相互制约关系。其通常的船舶航行过程可以描述为:前一艘船做出相应的状态改变后,跟随船依据获取的信息,分析决策后进行操作,例如制动直到停止。本文首先计算船舶间最小安全距离。该最小安全距离可分为静态最小安全距离和动态最小安全距离。静态安全距离指的是跟驰船只从运动到完全停止所需要保持的安全距离,而动态安全距离指的是跟驰船只均保持运动状态,在运动中所需要的安全距离。静态最小安全距离是指前一艘船舶保持静止的状态,后一艘船舶从当前速度和减速到停止所航行的距离。动态有很大的不确定性,前一艘船舶是在航行状态中,并且无法确定何时航行停止,这个分析出来的距离通常相比静态最小安全距离要小,但是更难确定。所以在本研究中使用的是静态最小安全距离。所建立的安全距离模型为

其中,S 表示为安全距离,V 表示当前船要减速前的速度,a 表示当前船的减速度。当船舶完全停止时,得到船舶的最小静态安全距离。
1.2 安全距离聚类方法
在本研究中,利用高斯分布来描述船舶跟驰航行的速度数据,并利用EM 算法的高斯混合分布模型对船舶跟驰航行数据进行聚类分析[15]。

其中αi为混合系数,需满足αi≥0 且是样本x 属于第i 个高斯混合成分的概率,μi和∑i为该高斯混合成分的均值和协方差。

其中
为数据样本x={Q1,Q2}由第i 个高斯混合成分生成的后验概率,p( y=j |θ=i,Q1,Q2)为数据样本由第i 个高斯混合成分生成且其类别为j 的概率。
本研究中采用EM算法聚类跟驰速度数据以求解高斯混合模型的参数,基于岳佳等[16]和Tian 等[17]的研究,根据当前模型参数计算未标记数据样本xj={Q1,Q2}属于各高斯混合成分的概率,并更新模型参数。经过不断迭代直至收敛即可获得EM算法的模型参数,以及数据样本x={Q1,Q2}所属的环境影响因子y ∈ξ 。
2 安全域划分和仿真结果分析
2.1 船舶数据分析
船舶在冰区航行时,必须考虑遇到海冰的情况,例如一些较厚的冰或者是浮冰的影响。本文对船舶在冰区航行的海冰数据进行了分析,采用AIRSS(Arctic Ice Regime Shipping System)系统进行冰况的评估,该系统依据海冰类型量化冰况,从而提供船舶安全操作建议。AIRSS 提供风险评估架构,用以评估在既定的冰况下航行安全的程度,并且利用观测的冰况和冰量,以及船只的分类对船舶安全状况进行分析[18]。AIRSS 框架包括6 种类型的冰况,可直接输入海冰浓度到冰数值框架中进行分析[19]。冰的类型描述了冰的物理性质。海冰的浓度可直接视为冰的类型,并且使用冰乘数(Ice multipliers,IM)对冰的厚度进行分类。表1 显示了如何在AIRSS 中确定冰乘数。冰乘数的定义为权重因子,代表不同的冰的类型对船只造成的相对风险损害。由冰对船只造成的损坏的风险越小,该值越高。AIRSS框架确定了6种与厚度相关的冰类型,如下:灰色(10~15 cm)、灰白色(15~30 cm)、第1年薄冰的第1 阶段(30~50 cm)、第1 年薄冰的第2 阶段(50~70 cm)、中等的第1 年(70~120 cm)和第1 年厚冰(超过120 cm)。
本文描述的冰况所使用的冰乘数根据表1得到。
破冰船领航下船舶安全域的划分和船舶航行速度和相互间距离存在明显的关系,并且船舶速度和距离的变化服从高斯混合分布,可在一定范围内依据历史导航数据对船舶安全域划分。AIS系统每隔大约10 s 更新1 次位置数据。Wang 等[20]指出船舶的移动会对船舶数据的传输产生影响。所以,为了保证航海安全,对船舶航行静态最小安全距离进行了求解,研究其规律,并且对船舶的速度和距离进行聚类分析,得到船舶安全域的划分。
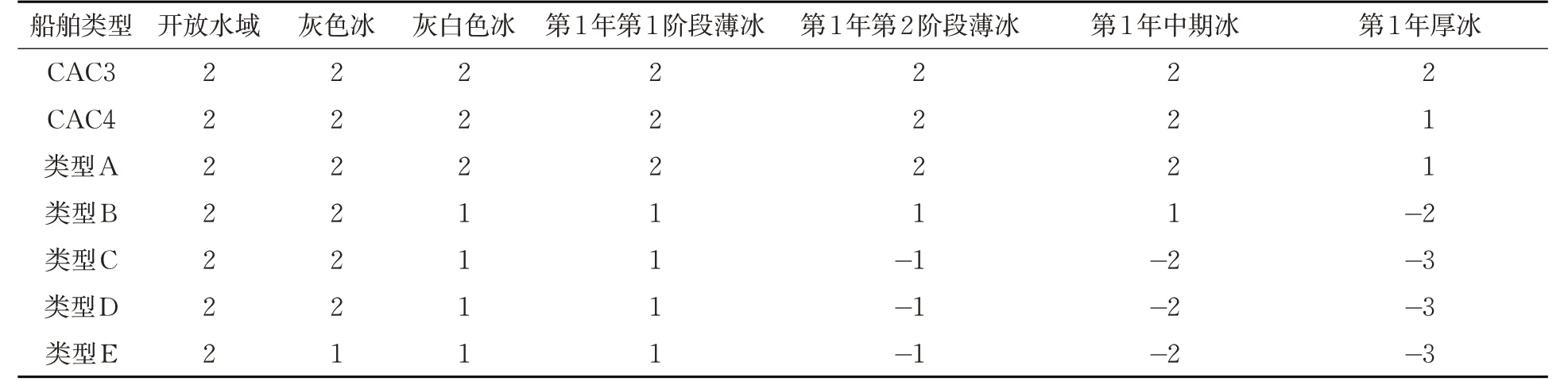
表1 北极冰运输系统冰乘数Tab.1 Arctic ice transport system ice multiplier
2.2 最小安全距离
图1为依据船舶最小安全距离公式对数据进行分析所计算出的结果。
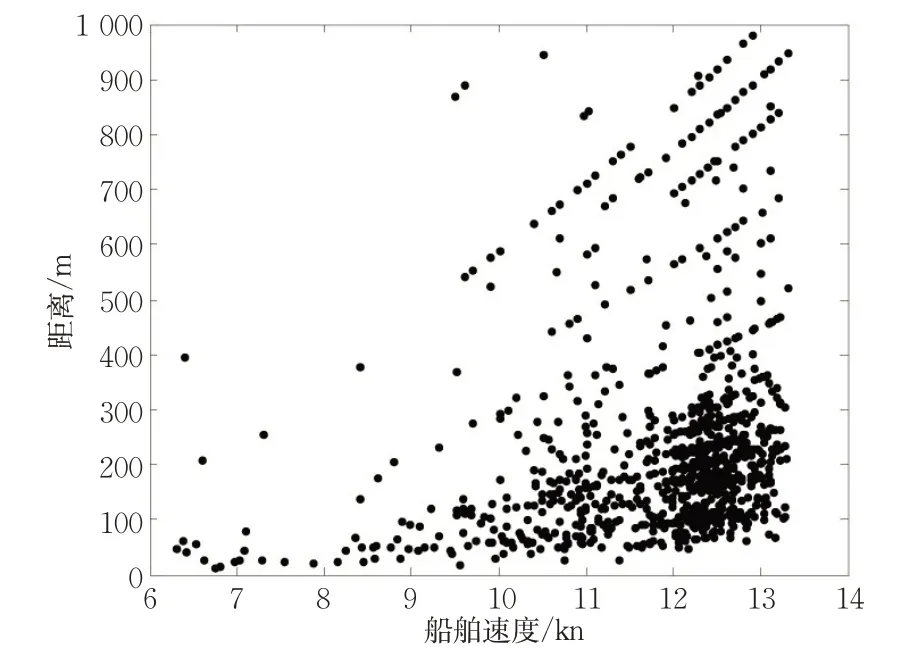
图1 速度-静态最小距离Fig.1 Speed-static minimum distance
从图1可以看出对静态安全距离进行计算形成了曲线簇,每一簇都是随着船舶速度的增大而船之间的安全距离增加。具有明显的规律性。这说明船舶航行的安全距离和速度有着相互制约关系,并且速度越高所需安全距离的长度也越长。形成不同曲线簇的原因,与冰况有关。
船舶在冰区航行,如果船员操作过程中没有保持合理的安全距离,碰撞的风险将会增加。冰区航行通常存在如下风险:破冰船护航过程中,跟随破冰船开辟航道的船舶需要关注船舶安全间距,避免破冰船遇到较厚的冰层停下来时跟随船与破冰船、跟随船之间存在的碰撞风险;当出现海域大面积结冰、大块浮冰聚集和冰层变厚等情况时,浮冰不易被雷达反射,较难发现,船舶会遭受到浮冰撞击的损伤,海冰聚集严重时会出现冰困;冰量的增加使得船舶航行速度呈降低趋势。
为简化分析过程,从图1 所示的曲线簇中选出部分较为明显的曲线簇,得到图2。
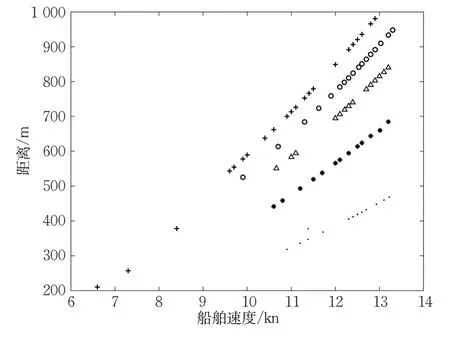
图2 部分速度-静态最小距离Fig.2 Partial speed-static minimum distance
从图2可以更加明显的看出船舶速度和距离的关系,即随着船舶航行速度的增加,船舶的最小静态安全距离也会随之增加。图2包括具有较为明显关系的5组数据。冰的厚度可能是造成不同曲线位置的原因。本文将上述5 条曲线从上至下分成5 种情况进行进一步研究,针对不同的曲线对应的冰厚度情况进行了分析仿真,见图3。
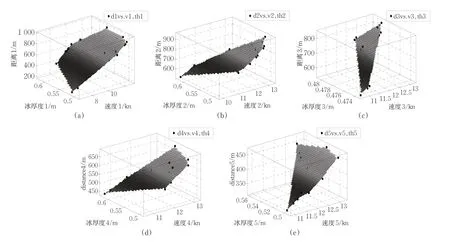
图3 5条曲线对应的不同冰厚度的三维关系图Fig.3 Three-dimensional plots of five curves for different thicknesses
进一步的分析验证了上述推断,速度和安全距离出现多条不同曲线的制约关系与冰况有关。图3表明不同的冰厚度情况对于曲线的航行速度和距离会产生不同的影响。
3 安全域划分结果分析
由于船舶跟驰航行在冰区更容易形成,产生航行风险,因此对于船舶冰区跟驰航行安全区域的划分研究很有必要。本研究中船舶冰区跟驰过程中的安全域可划分为安全,亚安全和危险这3 种状态。速度和距离是衡量船舶航行安全的重要指标。根据速度和距离,可以计算出船舶可能发生碰撞的时间距离。根据时间距离,本研究将冰区船舶跟驰航行的安全范围规范总结为如下4条划分原则。
1)船舶的速度较小,船之间的距离较大时,定义为安全范围。
2)当速度较大,船之间的距离较小时,定义为危险范围。
3)船舶的速度较小,船之间的距离较小时,定义为亚安全范围。
4)船舶的速度较大,船之间的距离较大时,定义为亚安全范围。
通过第2节阐述的安全距离聚类分析方法将相似度高的数据聚为一类,得到如下速度和船舶之间距离的分类结果。所用数据来自AIS 某破冰船在2011年3月的航行数据。
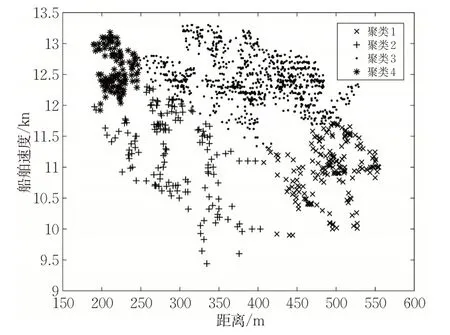
图4 某破冰船的航行数据分类结果Fig.4 Classification results of voyage data of an icebreaker
从图4 中可以看出,根据上述原则破冰船及跟驰船舶的速度和距离数据可聚为4 类,分别用“×”,“+”,“·”和“*”来表示不同聚类。按照所提出的4点原则可以得到如下结论。
1)聚类1。跟驰船舶与破冰船之间距离大,相对速度小。船舶间的时间距离较大,在破冰船发生突然减速等紧急情况时,船员有较多时间和较大的空间距离操控船舶以避免安全事故发生,因此处在该状态下航行的破冰船能够保证安全性较高的护航行动,对应于安全状态。
2)聚类2 和3。聚类2 表示跟驰船舶与破冰船之间距离和相对速度都小,聚类3 表示跟驰船舶与破冰船之间距离和相对速度都大。在发生突然减速等紧急情况时,前者由于距离小,后者由于速度大分别在时间和距离空间上,一定程度限制了跟随船在破冰船发生紧急情况时避碰措施的实施,从而有可能会造成安全事故发生。所以二者均处于聚类1和聚类4中间的2个状态,对应于亚安全状态。
3)聚类4。跟驰船舶与破冰船之间距离很小而相对速度很大。船舶间的时间距离较小,对于跟随船来说,一旦破冰船发生减速等紧急情况,没有足够的时间和空间距离将很难及时采取措施以避免安全事故的发生。这种状态下,对航海人员来说护航行动的容错率是非常低的。因此,对应于危险状态。
基于上述分析,为了保障冰区护航的安全,破冰船与跟随船之间结合各方面因素,应该使他们之间的距离和速度在安全的范围内,对应于上述聚类中的安全状态。一旦航海人员发现处于亚安全或危险状态,无论破冰船还是跟随船应当立即采取相应的措施以避免进入危险状态甚至碰撞事故的发生。这种安全域的划分能够为航海人员的航行决策提供有力的参考,保障冰区航行的安全。
4 结 论
本文在研究船舶冰区跟驰航行过程中,对最小静态安全距离进行了定义,并且指出了安全距离的数学求解方法。而后利用该求解方法建立了冰区船舶跟驰行为中航行速度和安全距离之间的关系得到相关的曲线簇,并且结合海冰厚度对船舶航行的安全距离进行了分析和验证。分析结果表明,冰区船舶跟驰过程中的航行安全状态受到船舶距离和速度的影响,同时船舶的航行风险与海冰状况相关。但是对于这种影响,还需要进一步的研究对其进行定量的分析。
为了进一步研究护航作业下船舶航行的安全状态,本文将高斯混合分布的EM 聚类算法应用于适合冰区护航中不同航行状态下的船舶安全域的划分,结合提出的4 点原则得到了很好的安全域划分结果,从而能够为航海人员的航行决策提供有力的参考,保障冰区航行的安全。
猜你喜欢
吉林电力(2022年1期)2022-11-10
能源工程(2022年2期)2022-05-23
海洋通报(2021年3期)2021-08-14
成都信息工程大学学报(2021年2期)2021-07-22
小学科学(学生版)(2021年2期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
动漫星空(兴趣百科)(2019年5期)2019-05-11
航空世界(2018年12期)2018-07-16
中国水运(2017年5期)2017-05-22
中国水运(2017年4期)2017-04-26
