
基于多目标优化的公交运行速度优化控制方法*
2020-11-13 02:00蒋佩玉张汝华
交通信息与安全 2020年3期
王 旭 蒋佩玉 张汝华
(山东大学齐鲁交通学院 济南250061)
0 引 言
“优先发展城市公共交通,引导绿色公交出行”是《交通强国建设纲要》中对于便捷舒适、经济高效的交通运输服务的基本要求[1]。公共交通被公认为是一种运量大、便捷度高的城市交通出行方式,但是由于地面公交运行受诸多因素的影响,整体运行效率、可靠性和舒适性尚不符合公交高品质服务的要求,仍存在很多运营和管理问题。提高公交运营水平对于增加公共交通吸引力、保障城市交通安全和通畅均有显著意义。然而,道路交通系统是一个由人-车-路-环境等因素组成的复杂系统,公交驾驶员在驾驶过程中需要认知和处理复杂的城市道路环境信息,易发生认知、处理或操作错误。因此,保障公交运营服务需要提供必要的驾驶辅助和运行控制。
传统的公交调度一般通过驻站控制调整公交发车间隔、驻站时间及停靠站点,缓解公交车辆接连或大间隔到达车站的情况,控制方法可分为基于等待时间[2-3]、时刻表[4]和车头时距[5-6]的方法。然而在实际应用中,驻站控制往往受到车站泊位能力的限制而无法发挥最优效果[7],也有可能造成同线路连续2车间隔过大而无法弥补的情况[8]。因此随着信息技术的发展,相关研究开始通过实时车速控制、信号优先控制等控制策略提高公交运行服务水平,其主要控制目标包括公交准时性、运行平稳性和燃油经济性等。在提高公交准时性方面,滕靖等[7]根据公交车辆车头时距偏差阈值,设计了一种区间车速引导动态控制方法;Carlos F.Daganzo 和Josh Pilachowski[8]基于自适应巡航控制设计了一种公交协调控制策略,可平衡车头时距并提高平均车速;王炜等[9]在一路一线直行式公交模式构想下,提出了一种车速及发车时间集成优化方法,可保证合理的车辆间隔。以运行平稳性为目标的公交控制研究通过结合车辆到达交叉口时间预测与信号灯配时方案计算车辆不停车通行速度[10],或通过计算车辆到达和通过时间窗优化车辆不停车通行综合控制方案[11-13],实现交叉口不停车以提高公交运行平稳性。另外,大量研究证明驾驶过程中不同的速度和加速度对公交运行能源消耗有较大的影响[14-16],王莹等[14]运用碳平衡法计算公交车不同工况下的油耗贡献率,确定车速及加减速的燃油经济性控制区间。韩旺等[15]将CAN 总线数据与IC卡数据结合,分析不同道路等级下公交车运行能耗及其影响因素,结果表明,车辆的能源消耗主要受停车时间、加减速时间以及上下客人数等因素影响。在此类研究的基础上,以燃油经济性为目标的公交速度控制愈发受到重视,例如李宗义[16]以减少公交运行油耗为目标,采用车辆比功率油耗计算模型确定公交绿色引导车速,然而仿真结果表明,仅以燃油经济性为目标进行绿色车速引导会损失一定的运行效率。高坤等[17]以油耗最优为目标,进行交叉口及站点前区间绿波车速引导,仿真结果表明该方法可有效降低油耗、提高能源利用效率。
现有研究成果为公交动态运行控制方法设计和评价提供了大量的模型和理论依据。公交准时性是影响乘客出行选择的首要因素[18],而燃油经济性是公交运营单位尤为关注的指标[19]。然而,现有运行控制方法多将燃油经济性作为评价指标而非控制目标,以燃油经济性的提升作为公交运行优化效果的体现,但燃油经济性是否最优犹未可知。此外,多目标优化在车辆调度方面得到了广泛应用[20-21],并开始应用在车速控制研究[22]中。现有车速控制研究多以单一类型指标为目标,较少同步优化多种类型指标。例如,Wu Wei等[22]将多个延误相关指标赋以权重值,将多目标问题转化为单目标问题。但是,多种类型指标之间难以确定权重取值,且不同类型目标具有不同优先级,通过权重分配方式转化为单目标问题难以体现高优先级目标的主导作用。对比公交准时性和燃油经济性2 类目标,准时性作为公交服务水平的基本体现应具有更高优先级,分配权重难以体现目标重要性分级。分层序列法(Stratified Sequencing Method)将多目标优化问题中的各个目标按照优先级或重要性分成不同层次,在满足最重要目标的可行解集内求得次重要目标的最优解[23],可避免多种类型目标权重分配不当,更好地保证高优先级目标的优化性能。因此,本文应用分层序列法实现公交准时性和燃油经济性的多目标优化控制。
众所周知,公交车辆到站存在准时、早点和晚点等不同情况,仅保证不停车通行或提高运行速度无法保证准时性,易导致同线路车辆串车;同理,匀速状态下公交车辆速度越快,行驶单位距离油耗越小,但若考虑包括加减速和停车怠速阶段在内的公交运行全过程,最大车速则不一定是油耗最小的方案。综合考虑公交准时性和燃油经济性的多目标优化控制,可保证公交车辆在延误最小的基础上以油耗最低的速度运行。因此,笔者深入挖掘公交车辆状态与运行指标的动态关系,在公交运行优化控制中兼顾准时性和燃油经济性,提出基于多目标优化的公交运行速度控制方法,并运用仿真实验实现并评价该控制方法,为城市公交运营管理提供新思路和理论依据。
1 公交运行速度实时控制策略
1.1 公交运行速度实时控制逻辑
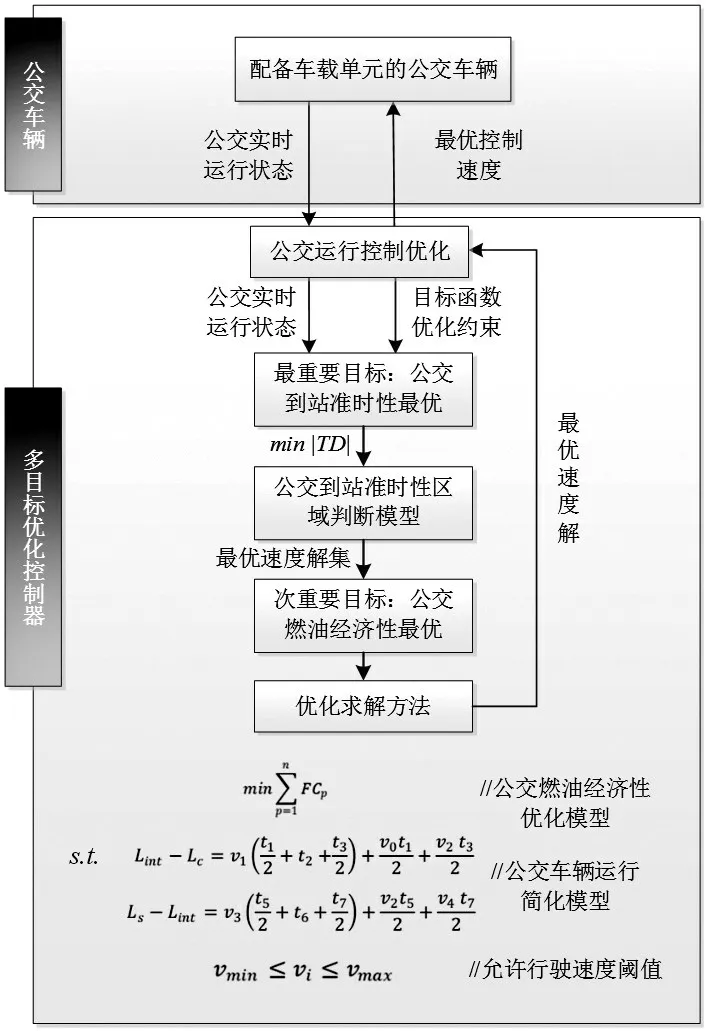
图1 基于多目标优化的公交运行速度实时控制框架Fig.1 Real-time transit speed control framework based on multi-objective optimization
本文选用多目标优化方法中的分层序列法设计公交运行速度实时控制方法(见图1),将公交运行控制目标设定为分别代表乘客利益和公交运营单位利益的2 个指标——准时性和燃油经济性,并选定公交准时性为最重要目标,燃油经济性为次重要目标。先针对准时性求出最优解集,在最优解集的基础上再对燃油经济性求出最优解。具体实现步骤为,公交车辆上配备的车载单元采集到的实时位置数据及时间信息,首先与线路沿线公交站点和交叉口位置匹配,以确定下游站点及交叉口位置,并输入多目标优化控制器进行公交运行控制优化。根据当前时间、车辆实时位置、信号灯配时及公交时刻表,结合公交到站准时性区域判断模型,确定当前公交车辆所在的准时性区域,进行到站准时性优化,得出最优速度解集。随后结合准时性区域进行公交燃油经济性优化,求解最优运行速度:若其位于准时区域,则在优先满足准时性要求的基础上,根据燃油经济性模型优化公交运行速度,得到公交运行建议速度;若其位于早点或晚点区域,则在优先保证到站时间偏差最小的基础上,优化燃油经济性模型,得到公交运行建议速度。其中,燃油经济性优化以最小化油耗为目标,以公交车辆运行简化模型得到的速度-时间-距离关系为线性约束,以允许行驶速度阈值为非线性约束,运用非线性问题求解算法求解。
1.2 公交到站准时性区域判断模型
假设当前时刻tc公交车辆位于位置Lc处,由当前车辆位置及车辆限速区间(即最大允许行驶速度vmax及最小允许行驶速度vmin)可得在位置Lc处准时到达站点的时间区间[tlb,tub],结合当前时刻tc判断车辆是否可准时到站:若tc在准时区域内,表明车辆以一定速度行驶可在ts时刻准时到达站点Ls处;若tc早于准时区域的下限时间tlb,则其位于早点区域,表明车辆无法通过调节速度准时到达站点,其到达站点Ls处时刻一定早于ts;若tc晚于准时区域的上限时间tub,则其位于晚点区域,表明车辆无法通过调节速度准时到达站点,其到达站点Ls时刻一定晚于ts。即若tc∈[tlb, tub],车辆可准时;若tc∈( -∞,tlb),车辆必早点;若tc∈(tub,+∞),车辆必晚点。需要注意的是,ts的取值可以根据公交车时刻表选取,也可以结合前车到站时间和理想车头间距选取;本文定义ts为时刻,在应用中也可定义为准时到站时间段。
图2 为公交车辆运行时间-距离示意图。若当前位置Lc与站点Ls之间不存在交叉口,或由最大允许行驶速度vmax及最小允许行驶速度vmin确定的准时区间上下限位于交叉口绿灯时间内,当前位置准时区域[tlb,tub]如图2(a)所示。若当前位置Lc与站点Ls之间存在交叉口,且由最小允许行驶速度vmin确定的准时区域下限位于交叉口红灯时间内,或由最大允许行驶速度vmax确定的准时区域下限位于交叉口红灯时间内,准时区域[tlb,tub]如图2(b)所示。准时区域[tlb,tub]计算如下。
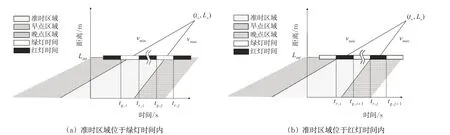
图2 公交运行时间-距离示意图Fig.2 Diagram of bus operation time-distance relationship
1)利用公交车辆最小允许行驶速度vmin计算得到交叉口位置Lint处准时区域下限为ts-,若其位于交叉口信号灯第i 周期内,根据信号相位状态可求得当前位置Lc的准时区域下限为

式中:tg,i为第i 周期的绿灯启亮时间,s;tr,i为第i周期的红灯启亮时间,s;tg,i+1为第i+1周期的绿灯启亮时间,s。
2)利用公交车辆最大允许行驶速度vmax计算得到交叉口处准时区域上限为,若其位于交叉口信号灯第j 周期内,根据信号相位状态可求得当前位置Lc的准时区域上限为

式中:tg,j为第j 周期的绿灯启亮时间,s;tr,j为第j周期的红灯启亮时间,s;tg,j+1为第j+1周期的绿灯启亮时间,s。
1.3 公交燃油经济性优化模型
车辆行驶过程中的燃油消耗主要受车辆发动机输出功率的影响,在实际道路运行中,车辆的瞬时输出功率容易受到周边交通环境变化或车辆自身状态的影响,难以测量和量化。本研究所采用的基于车辆比功率(Vehicle Specific Power,以下简称VSP)的油耗模型,综合考虑了空气阻力、滚动摩擦阻力等多重因素的影响,以及行驶过程中车辆动能和势能的变化,可较为准确地测算车辆的燃油消耗[24],在机动车燃油消耗计算领域应用较广泛。本研究以公交车辆行驶速度v 为控制变量,根据行驶速度v 计算得到的VSP值确定所处区间单元,得到区间单元的平均油耗率,利用公交运行过程燃油消耗总量构建燃油经济性模型,并将其设置为控制目标函数,结合控制约束条件求解最优行驶速度。
1.3.1 目标函数
基于VSP 的公交燃油经济性优化模型从公交运营部门利益出发,以公交运行油耗为控制目标,最小化公交车辆运行油耗,其目标函数为

式中:FCp为p 阶段车辆油耗,mL,ERq为VSP 区间单元在q 时的平均油耗率,mL/s,ERq=ER0×NERq=1.69NERq;ER0为VSP 区间单元在零时的平均油耗率,mL/s,对于公交车辆,ER0=1.69 mL/s[25-26];NERq为VSP 区间单元在q 时的标准化油耗率,计算见式(4)。

现有研究[24]根据中国公交车辆实际参数和行驶环境,标定了公交车辆VSP 计算公式。本研究采用式(5)计算VSP。

式中:VSP 为机动车比功率,kW/t;a 为机动车加速度,m/s2;v 为机动车行驶速度,m/s。
1.3.2 约束条件
1)允许行驶速度约束。在公交车运行过程中,公交车辆匀速行驶时运行速度应在允许速度范围内,需满足如下约束条件见式(6)。

2)公交车辆运行简化模型得到的速度-时间-距离关系约束。假设公交车由当前位置Lc通过交叉口Lint到达公交站点Ls的运行过程中,公交车速度变化满足匀加速直线运动过程,且加/减速过程应用固定的加/减速度。公交车辆速度曲线随其目标车速的不同而不同,图3 为需在交叉口停车等待情况下的车辆运动过程速度曲线,以下通过该种情况解释公交车辆运行简化模型。车辆在当前位置初始速度为v0,经t1时间加速到v1,匀速行驶t2时间后,再经t3时间减速到v2=0 到达交叉口。然后车辆在交叉口停靠等待t4时间后,绿灯通过交叉口。车辆从车速v2=0 经t5加速到v3。随后经t6时间的匀速运动后,减速到达公交站点,最终车速v4=0。在实际运行过程中存在公交车辆绿灯通过交叉口无需停车等其他情况,但公交车辆运行过程仍可拆分成多个匀加/减速运动阶段。因此,公交车辆运行过程中行驶距离可通过匀加/减速运动公式求得,各阶段行驶距离受当前位置、交叉口及公交站点之间的距离约束,公交车辆运行速度-时间-距离关系应满足约束见式(7)~(8)。
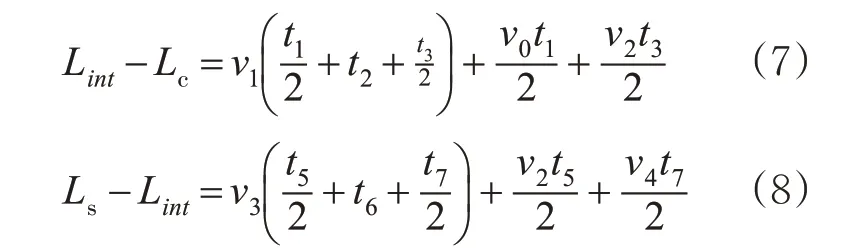

图3 公交车辆运行时间-速度关系示意图Fig.3 Diagram of bus operation time-speed relationship
1.4 基于多目标优化的运行速度控制策略
根据准时性区域判断模型确定的公交车辆所处准时性区域,可分别选择不同公交车辆区间运行速度控制方案如下。
1)若当前车辆位于准时区域内,在保证车辆准时到站的基础上,通过优化目标函数,即燃油经济性模型,得到控制变量最优值
2)若当前车辆位于早点区域内,车辆应尽量采用最小允许速度运行以保证公交车辆的准时性能,最小化车辆到站时间偏差。若以最小允许速度vmin运行可在绿灯时间内通过交叉口,则皆可取最小允许速度vmin,即若n=1,2,3,…,则
若车辆以最小允许速度vmin运行在红灯时间内到达交叉口,则取最小值vmin,通过优化燃油经济性目标函数确定,即 若,则 通 过优 化,且
3)若当前车辆位于晚点区域内,车辆应尽量采用最大允许速度运行,以最小化车辆延误和到站时间偏差。若以最大允许速度vmax运行可在绿灯时间内到达交叉口,则皆可取最大允许速度vmax,即 若n=1,2,3,…,则v1=v3=vmax。
若车辆以最大允许速度vmax运行在红灯时间内到达交叉口,则取最大值,通过优化燃油经济性目标函数确定,即若,则通过优化,并且
以上速度控制方案中对于燃油经济性的优化是利用公交运行简化模型计算公交车辆各阶段运行时间,结合公交车加/减速度特性确定车辆瞬时速度,采用上述公交燃油经济性优化模型,计算得到公交运行过程燃油消耗,根据燃油经济性模型求解最优控制速度。
2 仿真验证
2.1 研究实例与数据采集
为验证本研究提出的速度优化控制策略的有效性,本文选取济南市BRT-1 号线路为实验对象进行仿真验证。BRT-1 号线西起济南西站公交枢纽,东至全福立交桥。本研究采用跟车调查法对BRT-1号线车辆运行状况进行调查,用手持GPS定位设备及录像设备对全线站点及交叉口位置信息进行采集,根据定位信息确定公交车辆瞬时运行速度。人工调查确定沿线交叉口信号配时,结合车辆运行GPS数据,计算站点和交叉口停车时间。为减少调查中社会车辆对公交车辆运行的干扰,调查在平峰时段(15:00—17:00)进行,共得到7 200组车辆秒级速度数据,通过车辆瞬时速度计算得出车辆瞬时加速度。分析所采集数据可知,85%分位减速度为-0.95 m/s2,85%分位加速度为0.73 m/s2,最大速度为12.5 m/s,最小速度为5.5 m/s。
仿真验证选用BRT-1 号线无影山路站至无影山中路站路段(见图4)。若将BRT-1号线上游站点黄岗路站位置设为0 m,结合调查数据无影山路站位置为1 843 m,无影山路与无影山中路交叉口位置为1 936 m,下游站点无影山东路站位置为2 273 m。信号交叉口信号周期长度为150 s,每个周期包括绿灯63 s、黄灯3 s 及红灯84 s,无公交信号优先设置。以上数据为模型参数值的取值提供了依据。
2.2 仿真模型建立与标定
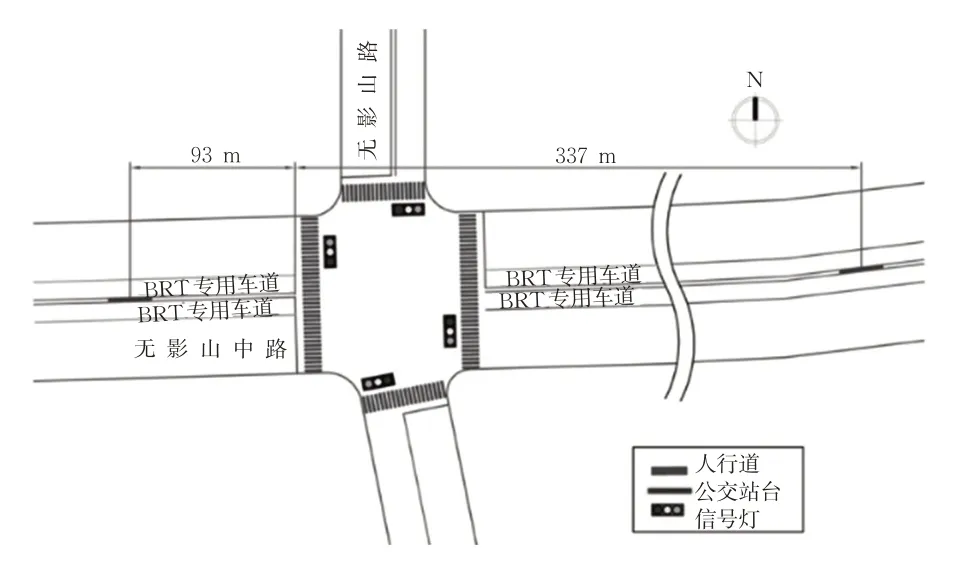
图4 研究路段Fig.4 Study site
利用所采集数据和公交运行简化模型基于Matlab 软件搭建公交运行仿真平台,校准及验证模型参数。图5 和图6 展示了调查中1 辆公交车的运行状况。该车于15:08:07 时刻由无影山路站点出发,15:09:27时刻准时到达无影山东路站,图6显示仿真平台模拟的速度曲线与实际速度曲线吻合度较高,经计算得均方根误差为0.76 m/s。非参数双尾检验得出在95%置信区间下渐进显著性为0.619,从而证明2 条曲线无显著性差异,本仿真平台可模拟公交运行状态以评价优化控制策略有效性。

图5 实测车辆运行时间-距离图Fig.5 Actual measurements of bus operation time-distance relationship

图6 仿真速度与实测运行速度对比Fig.6 Comparison between simulated and actual operation speed
2.3 优化求解算法
仿真中车速优化控制运用序列二次规划(sequential quadratic programming,简称SQP)算法求解燃油经济性目标函数。SQP是一种有约束的非线性优化问题求解算法,它将原始问题划分为一系列二次规划的子问题进行求解,具有收敛性好、计算效率高、边界搜索能力强等优点[27]。
2.4 控制性能评价
2.4.1 性能评价指标
为展示控制策略性能,仿真实验通过变化模型输入创建多种场景,为保证车辆准时性及燃油经济性,不同场景下速度控制方案不同,计算并对比控制前后到站时间偏差及路段燃油消耗,以评价控制策略效果。其中,时间偏差TD 为实际到站时间与公交时刻表到站时间的差值,数值为正表明实际到站时间晚于时刻表到站时间,数值为负表明实际到站时间早于时刻表到站时间,其绝对值|TD|代表实际运行情况与时刻表偏差程度。路段燃油消耗FC 使用燃油经济性优化模型(式(3))中燃油消耗计算方法计算。
2.4.2 仿真场景设计
本研究中每个仿真场景通过改变2个模型输入(即下游站点位置和车辆当前位置)中的1个,而另1个保持不变,来构建车辆、信号灯交叉口及下游车站之间的不同时空关系。实测中下游公交车站位置位于2 273 m 处,仿真实验选取车站位置变化区间为2 173 m到2 473 m,变化步长为10 m;实测中当前车辆位置位于1 843 m 处,仿真实验选取当前车辆位置变化区间为1 643 m 到1 913 m,变化步长为10 m。在仿真验证中,每个仿真场景均运行无控制方案及所提出控制方案,通过对比控制前后性能评价指标评价控制性能。
2.4.3 仿真结果及分析
在仿真平台运行控制方案,得到每个场景下的建议速度曲线。图7为本策略在多种场景下的最优速度曲线,结果证明本文提出的控制策略在不同场景中均可给出可靠速度建议。通过对比控制前场景,图8 显示在所有场景中控制策略均降低了时间偏差,最大降低值为26 s。当下游站点在2 173 m至2 263 m 区间内时,控制前车辆早点情况严重,此时速度控制通过降低车速以调节到站时间,然而在运行时间增加的同时也增加了燃油消耗,在此区间内燃油消耗平均增加了13.76 mL。由此证明,当车辆早点严重的情况下,仅进行车速调节可提高准时性,但会增加燃油消耗。当下游站点位置大于2 273m时,车辆晚点情况较严重,此时速度控制同时降低了时间偏差和燃油消耗,其中燃油消耗平均降低了23.70 mL,从而证明当车辆即将晚点情况下,本文提出的速度控制可同时保证准时性和燃油经济性。在变化车辆当前位置的场景中,速度控制后82%的场景获得了准时性和燃油经济性的同步提升,其余场景燃油消耗小幅提升(平均值为1.47 mL)。结合表1 中性能评价指标数据计算可得所有场景燃油消耗平均降低了7.32 mL,可得出结论,本研究提出的速度控制策略可在公交运行过程中优化准时性和燃油经济性。

图7 不同场景下速度控制曲线Fig.7 Speed control profiles in different scenarios

图8 不同场景下公交到站时间偏差Fig.8 Time deviations between bus schedule and actual arrival time in different scenarios

表1 速度控制前后准时性与燃油经济性指标Tab.1 Punctuality and fuel economy indexes before and after speed control
3 结 论
本文提出了一种基于多目标优化的公交运行速度优化控制方法,将公交运行目标根据重要性分为准时性和燃油经济性2 个层级,并利用公交到站准时性区域判断模型判断准时性,通过燃油经济性优化模型得出公交运行区间最优速度建议。仿真实验结果表明,本文提出的控制策略在多种参数组合下的不同场景中均可给出可靠速度建议,并且公交运行准时性与燃油经济性有了不同程度的改善。然而,仿真实验中发现,在公交早点情况严重的场景中,仅调节运行车速会以牺牲燃油经济性为代价提高准时性,后续研究将综合考虑车站泊位能力等因素进行车速和驻站组合控制研究;并且,本文仅将速度优化控制策略应用于下游单个车站场景,在后续的研究中将结合多个站点的到站时刻进行公交运行全线的速度控制。
猜你喜欢
建材发展导向(2022年14期)2022-08-19
房地产导刊(2022年4期)2022-04-19
汽车工程师(2021年12期)2022-01-17
汽车工程师(2021年11期)2021-12-21
建材发展导向(2021年19期)2021-12-06
建材发展导向(2021年15期)2021-11-05
今日农业(2021年8期)2021-07-28
儿童故事画报·智力大王(2018年1期)2018-10-30
中国房地产业(2016年2期)2016-03-01
郑州大学学报(工学版)(2014年6期)2014-03-01
