航道整治建筑物水下检测方法初探
2020-11-06 05:50张莹康路遥许吉羊
中国水运 2020年9期
关键词:工程质量
张莹 康路遥 许吉羊

摘 要:随着我国航道的飞速发展,航道工程建设规模、投资力度达到历史新高度。为保障航道整治建筑物工程质量,总结近年来航道整治建筑物水下检测最新发展成果,本文从原理、适用性等角度出发,介绍主要检测方法及特点,为现阶段的检测工作提供依据。
关键词:航道整治建筑物;水下检测;工程质量
中图分类号:U617.9 文献标识码:A 文章编号:1006—7973(2020)09-0130-03
1引言
航道整治建筑物一般位于迎流顶冲部位,随着河床变化以及水流冲刷,建筑物周边易毁损。如不能发现其损毁,及时采取维修措施,则损毁将进一步加剧,最终影响航道整治建筑物整治功能的发挥,且维护成本会大大增加,因此定期对航道整治建筑物进行检测显得尤为重要。本文特对现有主要航道整治建筑物水下检测方法进行分析总结,为检测人员制定检测方案提供依据。
2航道整治建筑物水下检测方法
2.1水下探摸摄像检测方法
水下探摸摄像检测方法是通过搭建摄像平台,连接摄像机与水下电视,水面操作人员根据监控电视系统指挥潜水员,顺定位轨迹进行检测作业,潜水员与水上操作人员通报水下具体情况,并进行水下摄像取样。如遇被沙淤埋的情况,用高压水枪冲沙清理干净后再进行摄像作业。潜水员根据本次检测的实际情况,做出客观具体的潜水检测报告。检测员再结合检测报告,组织整理相关材料,提供准确的检测结果。
水下摄像系统检测优点是较为直观,能够清楚看到水底构筑物状态,潜水员可在水下进行障碍物清除等简单的施工作业。其缺点是检测受流速、水深、水质状况、构筑物淤埋情况等多种条件限制。
2.2二维图像声呐检测法
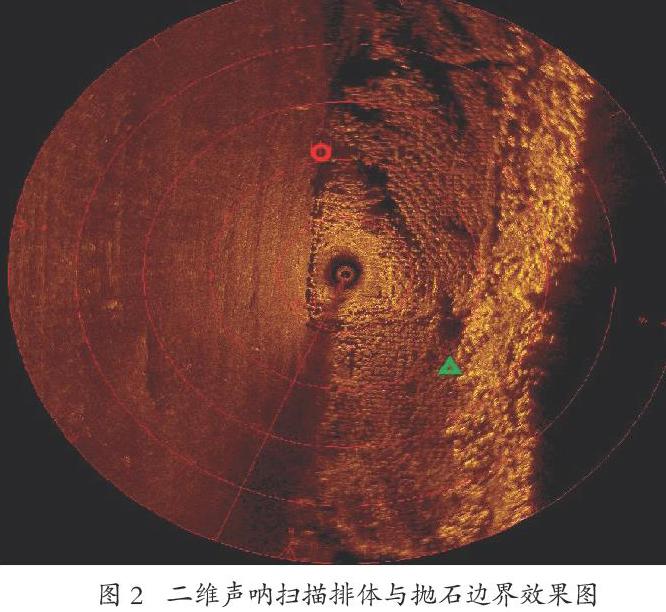
二维图像声呐检测法是通过发射声波在物体或河床表面发生吸收、反射及散射,部分散射能量沿发射方向返回换能器处而被接收,声呐探头以一定角速度绕竖直轴步进旋转,每次旋转重复声波的发射和接收,从而实现对周围一定角度范围内目标的扫描探测。基于二维扫描声呐图像可开展水下目标的发现、属性定性判读、简单距离量测工作。
二维图像声呐检测优点是采用静态旋转扫描模式,在相同作业条件下实现对同一目标的多次扫描,适合于水下目标实时动态检测。通过GPS和罗经等设备实现声呐探头的绝对定位,从而实现多站二维扫描图像的地理镶嵌,可进行水下目标分布范围的检测。
二维图像声呐检测缺点,航道整治构筑物一般范围较大,声呐设备有效作业半径多小于100m,大区域成图时需要多站扫描拼接。受旋转步进角度的限制,二维扫描图像并非等分辨率成图,其成图综合分辨率多为分米级,形成的图像为二维平面投影图像,无法反馈构筑物的立体形态。单站测量时,要求整个扫描过程处于同一测量基准下,施测过程对平台稳定性要求较高。且构筑物淤埋情况下无法使用二维图像声呐检测。
2.3三维图像声呐检测法
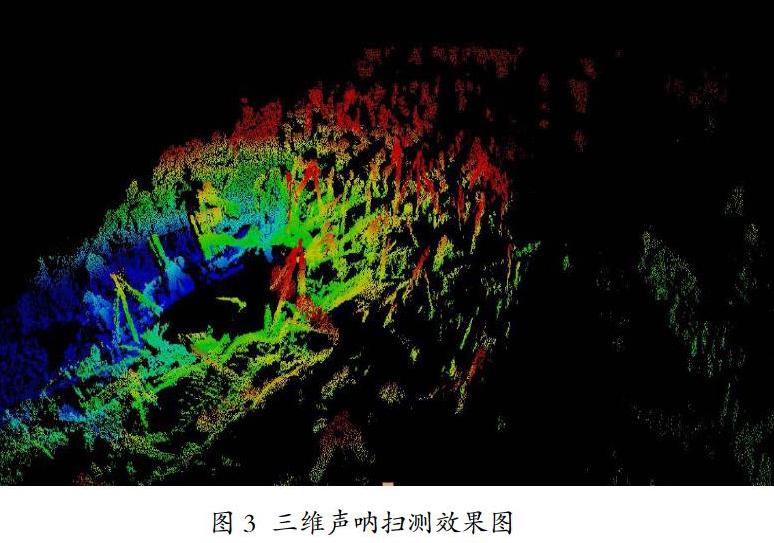
三维图像声呐系统又称水下三维全景成像声呐系统,该系统可生成水下地形、结构和目标物的高分辨图像。三维图像声呐通过声学闪耀阵列将不同频率声波按一定的角度辐射形成扇面,不同频率对应不同的辐射角度,声波经目标反射后被声学接收器所接收。
三维图像声呐在30m范围内,其长度误差在4cm以内,角度误差在1°以内,球形扫测一圈大约在6min-12min左右,适用于小范围定点静态扫描,所成图像为三维立体图像,对细节识别度高。三维图像声呐缺点是扫测范围小,对整治建筑物整体状态检测较为困难,需设置多个测点,拼图数据量和工作量大。单站测量时,要求整个扫描过程处于同一测量基准下,施测过程对平台稳定性要求较高,且同样对有淤埋构筑物无法检测。
2.4多波束检测法
多波束测深系统由波束换能器阵、波束空间位置传感器、数据采集处理系统等三部分组成。该系统通过发射和接受声波,获得波束到达水底的时间,计算水深值。其主要用于对水下地形地貌进行大范围全覆盖测量及水下实时声纳三维图像显示,可直观地看到水下的地形起伏、冲淤情况以及护岸工程的效果。
多波束测深系统适用于大范围走航扫测,扫测精度高,扫测成图为三维图像,以广泛用于航道整治建筑物的检测和航道水底地形的扫测,并且对细节识别度较高,可以对船舶姿态的影响进行修正。多波束测深系统的缺点是价格高昂,配套设备较多,安装复杂费时,只能检测江底表面的状态,不能检测淤埋的整治建筑物和沉船。
2.5三维高分辨率多道缆地层剖面系统检测法
三维高分辨率多道缆地层剖面系统由电源箱、震源、水听器缆、采集单元这几个主要部分组成。完整的系统可以应用于淡水或海水环境下获取高分辨率三维地震数据,穿透能力可达到湖、河床下面约300m的深度,这种对地层的穿透能力是浅地层剖面仪所不能达到的,在对剖深和分辨率有更高要求时,绝大多数使用者都会选择利用电火花剖面系统来进行工作。
不同于普通浅水电火花系统,三维电火花地层剖面系统能够提供的是三维底层沉积及掩埋物体图像。该功能主要针对的是对埋在水底下面的目标的探测,例如管道、锚链、铁锚及沉船等。因为该类目标在实时二维图像中,往往需要多年的经验进行判断,或者只有在进行了多条测线的测量后,才能够通过某些特定软件进行数据处理,得到相对确定的判断。但三维电火花剖面系统,能够帮助没有多年经验的使用者,得到直观的水底埋藏目标的图像。
该系统可以应用于湖泊与江河勘测、港口勘测、水利工程,桥梁、路由管道、风电项目勘察,掩埋砾石清理,航道危险障碍物调查等项目中。三维电火花系统要求船至少有25-35m长和6-8m宽。船只尾部固定两个伸出船侧的支架,支架需要约6m长,具体长度根据船只情况确定。船只运行时的噪音与运行时的动力成正比,因此建议使用低功率,一台低转速推进器。为了方便布放地震缆绞车和两个震源,船只后甲板应有最少25-30m2空间。2台高压电源箱、2台采集系统和地震缆定位系统需要在测量室内留出约20m2空间。
相较于其他检测方法,三维电火花系统检测能穿透地层,对一定深度的水底地层形成三维图形,通过切片分析可以探知淤埋整治构筑物和沉船情况。其具有成像立体,精确度更高,易分辨目标物等优点。但三维电火花安装较为复杂,价格高昂,作业难度大,且数据后处理耗时较长。
3结语
随着社會的发展,人们对航道整治建筑物工程质量要求越来越高,合理规范应用各类水下检测手段,对施工质量进行有效监控和检测将成为工程中的头等大事。在检测前期,检测人员应结合现场情况、各类检测方法的特点综合考虑,制定检测方案。对于检测情况较为复杂的项目可采用多种检测方法组合的方式进行检测,以提高检测效率及质量。
参考文献:
[1]JTS 131-2012,水运工程测量规范[S].
[2] 赵建虎.现代海洋测绘[M].武汉:武汉大学出版社,1997.
[3] 聂炳林.国内外水下检测与监测技术的新进展[J].中国海洋平台,2005,20(5):43-45.
[4] Shi K.Fundamentals of geophysics[M].Beijing Peking University Press,2002.
[5] 吕莉.高新技术在水下测量中的综合应用分析[J].科技信息,2013,13(2):76-77.
[6] 李家彪,等.多波束勘测原理技术与方法[M].北京:海洋出版社,1999.
[7] 贾贻玲.多波束测深系统在内河航道测量中的运用[J].工程技术,2016,7(9):18.
[8] 王丽娜.侧扫声呐数据采集与地貌图像构建[J].北京测绘,2018,8(32):965-969.
[9] Pinto M,Ferreira B, Matos A, etal. Side Scan Sonar Image Segmentation and Feature Extraction[C]. Oceans.2009,IEEE:1-9.
猜你喜欢
电子乐园·上旬刊(2021年7期)2021-07-19
中国房地产业·上旬(2020年10期)2020-11-06
中国建筑防水·悦居(2018年9期)2018-11-12
中国建筑防水·悦居(2018年4期)2018-11-12
中国建筑防水·悦居(2018年3期)2018-11-12
中国高新技术企业(2016年33期)2016-12-27
中国新技术新产品(2016年23期)2016-12-26
中国高新技术企业(2016年31期)2016-12-22
城市建设理论研究(2012年22期)2012-09-06