网箱养殖平台自动投饲系统设计与试验分析
2020-11-06 01:41王志勇冯书庆林礼群徐志强
渔业现代化 2020年5期
王志勇,冯书庆,林礼群,徐志强
(1 中国水产科学研究院渔业机械仪器研究所,上海 200092; 2青岛海洋科学与技术国家实验室,山东 青岛 266000)
海水网箱养殖已发展成为中国海水养殖的重要产业之一,但网箱养殖装备发展却相对滞后,当前国内大部分的网箱投饲机智能化程度较低,主要是以机械化取代人工投饲。近海网箱养殖投喂操作大部分是在船板或简易搭建的浮台上实施,工作效率低,平台抗风浪能力差。深海网箱近几年陆续开发了不同形式的网箱自动投饲系统,基本可以实现远程、定时定量自动投喂,但是相比国外先进投饲装置在系统化、自动化、精确度等方面仍有差距,在使用过程中还存在不足之处,其可靠性和安全性需要进一步完善,尚未进行标准化、产业化生产,目前只在个别深水网箱养殖基地进行试验与示范应用[1-4]。国外在自动投饲领域技术水平较高,许多国家拥有较为完善的智能化投饲系统,基本实现系统化、精确化和智能化[5-6]。
随着深远海养殖的大力发展,尤其是在远离海岸的养殖区,养殖环境需要依托养殖管理平台,配套专属的网箱设施、物流补给船和陆基保障设施,养殖生产的各个环节需要配套全面的机械化及自动化装备,以及信息化管理系统等。本文以我国深远海养殖为重点,依托浮式养殖作业平台,通过自动投饲装备关键技术研究与集成,研制出适于深远海养殖管理的浮式平台自动投饲系统,可以更好提高养殖作业的灵活性和适用性[7-10]。
1 系统设计及总体布置
1.1 管理平台设计
投饲平台采用钢结构形式,浮式,集自动投饲和日常生产管理等功能于一体,结合海上长期养殖浮式平台管理的特性,能够满足养殖基本功能配置要求,充分考虑平台的安全性和经济性,进行平台结构型式及主尺度设计,如图1所示。
平台主要技术参数为:总长20 m,型宽10 m,型深1.8 m,设计吃水0.80 m,载荷量 160 t。
1.2 投饲系统结构及工作原理
投饲系统采用正压气力输送,系统气源选择罗茨鼓风机,通过变频调速可控制风量,最长输送距离350 m。为了降低养殖管理平台整体重心高度,提高平台的稳性,投饲系统料斗采用下沉式结构,料斗设备检修区下沉1.4 m,四周密封,两侧开设人孔,以便旋转下料器的检修与维护(图2)。由于料斗设置于养殖管理平台中央,满仓或空仓对平台的稳定性影响较小,平台始终处于平稳状态。
饲料经运输船运至管理平台储料区,经上料机抽吸至投饲系统料斗,在料斗的顶部和底侧分别安装有一料位开关,用来监测料斗内饲料状态。两个料斗下方各配一个电动闸门,螺旋输料机与电动闸门连接。两套螺旋输送喂料机下方设有一个旋转下料器,螺旋输送喂料机釆用变频电机驱动,可以单独控制。针对养殖过程中不同养殖对象,可以选择不同饲料进行定量、分时投喂。气送系统采用正压输送,可以方便多养殖点投饲布置,由于正压输送风机出口温度较高,影响饲料特性,因此在风机出口安装一风机冷却器,有效降低输送管中气流温度。
通过养殖管理平台对投饲系统进行集中控制,投喂时料斗中的饲料通过下方的螺旋输料机和下料器进入气料混合管,经弯管进入投饲分配器,分配器设有多个出料口,连接到不同输送管道。投喂分配器可以手动选择某个投饲管道,也可以通过程序设定按顺序选择,在高速气流作用下饲料输送至管道末端撒料头,喷撒到网箱中心进行投喂,满足多个网箱养殖的投喂需求[11-15]。
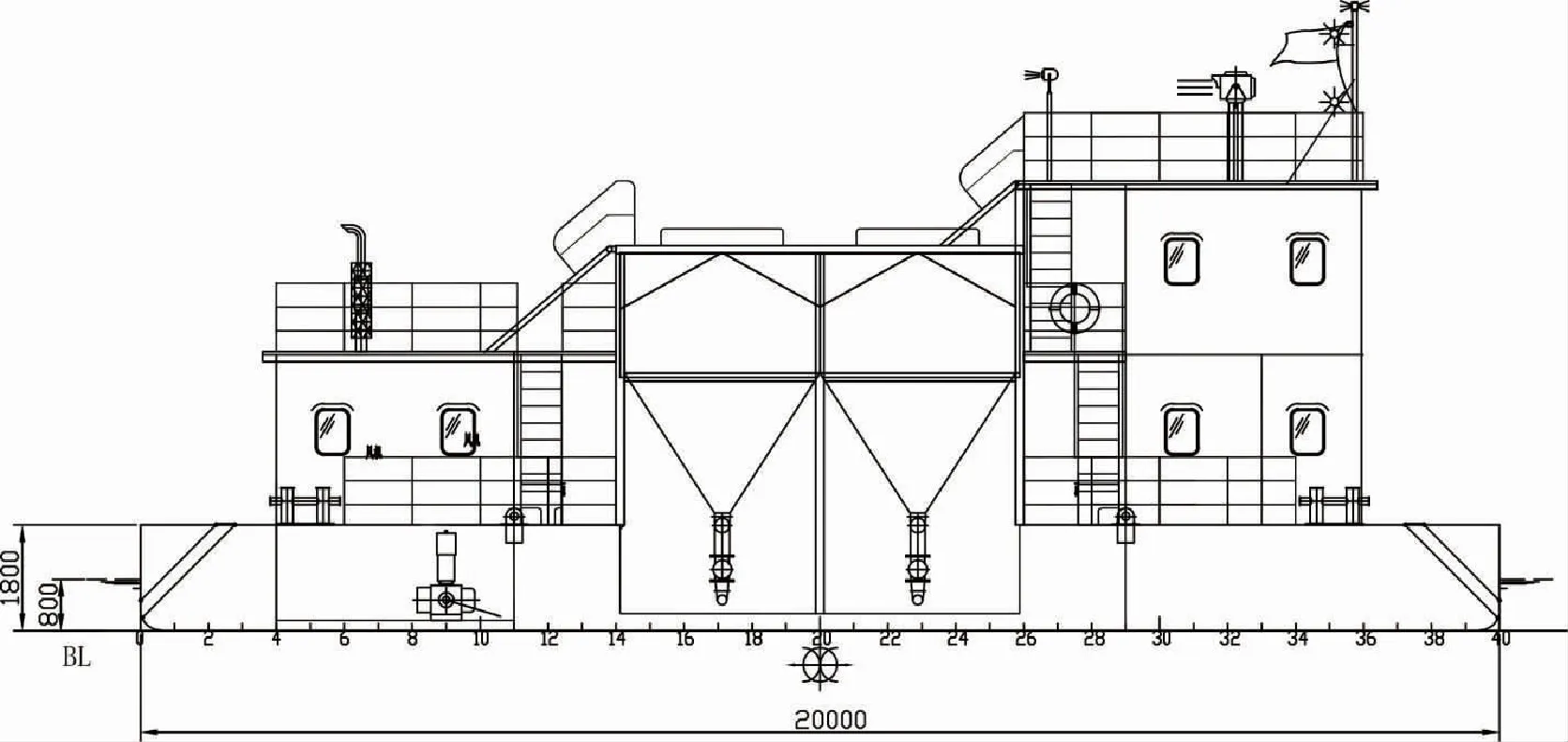
图1 网箱养殖管理平台Fig.1 Cage culture management platform

图2 网箱养殖平台自动投饲系统总体结构Fig.2 Overall structure of automatic feeding system of cage culture platform
1.3 投饲系统主要参数设计
养殖网箱为圆形双浮管式,周长100 m,网深15 m,数量10个,单个网箱每天最大投饲量500 kg。根据投喂需求确定压送式气力输送的设计方案及主要技术参数,进行气流速度、设计输送量、混合比、输送用空气量及阻力损失的计算,从而确定风机的压力、容量及电动机功率。风机的参数关系到物料输送量的大小和输送量的稳定性,合理的参数设计是气力输送系统顺利运行的关键[16-17]。
所需风量一般由物料的输送量、混合比确定,计算公式如下:
(1)
式中:Q—风量,m3/min ;G—输送量,kg/h;γ—空气密度,kg/m3;μ—输送混合比。
根据气力输送所需的风量和输送速度来确定管道的直径:
(2)
式中:D—输送管直径,mm;Q—风量,m3/min ;v—输送气流速度,m/s。
在输料管中,饲料颗粒的运动状态,除了与被输送饲料的物理性质、几何性质和水力性质有关外,主要是随输送气流速度的大小和输送浓度即混合比而变化。已知输送量G=500 kg/h,标准大气压下空气比重γ=1.2,对于输送速度,可参照工程实际中不同物料的形状和密度初步确定。一般在水产饲料气力输送中,对于均匀粒状物料低压输送,v=16~25 m/s,混合比μ=2~4。结合设计经验,该投饲系统设计选取输送速度v=20 m/s,μ=2。 将以上参数代入公式(1)和公式(2),计算得Q=3.47 m3/min,D=66 mm。考虑系统设计裕量,选择罗茨风机参数为流量Q=4.80 m3/min,风机的功率为15 kW,输料管道D75 mm×3.5 mm。
2 控制系统设计
2.1 硬件系统设计
系统硬件控制主要包括风机、螺旋输料机、下料器、真空上料机,主电路图如图3所示。控制系统主要由PLC、断路器、中间继电器、变频器等构成,PLC作为系统的核心控制器件,主要完成:开、停机控制;运行流程控制;电源装置状态量的采集;位置信号采集;设置、显示参数的计算。上位机采用研华IPC-610H工控机,上位机与PLC采用TCP/IP通讯协议通过以太网接口进行通讯,PLC和变频器之间通过RS-485串行通讯,控制螺旋输料机变频调速实现投饲机的定量投喂,并通过接触器信号实现输送风机的风量控制[18-20]。
输入部分由限位开关、料位开关组成,完成信号采集。输出部分由分配器电机、下料器电机、输料机电机、上料电机和报警装置组成,系统控制如图4所示。

图3 投饲系统主电路图Fig.3 Main circuit diagram of feeding system
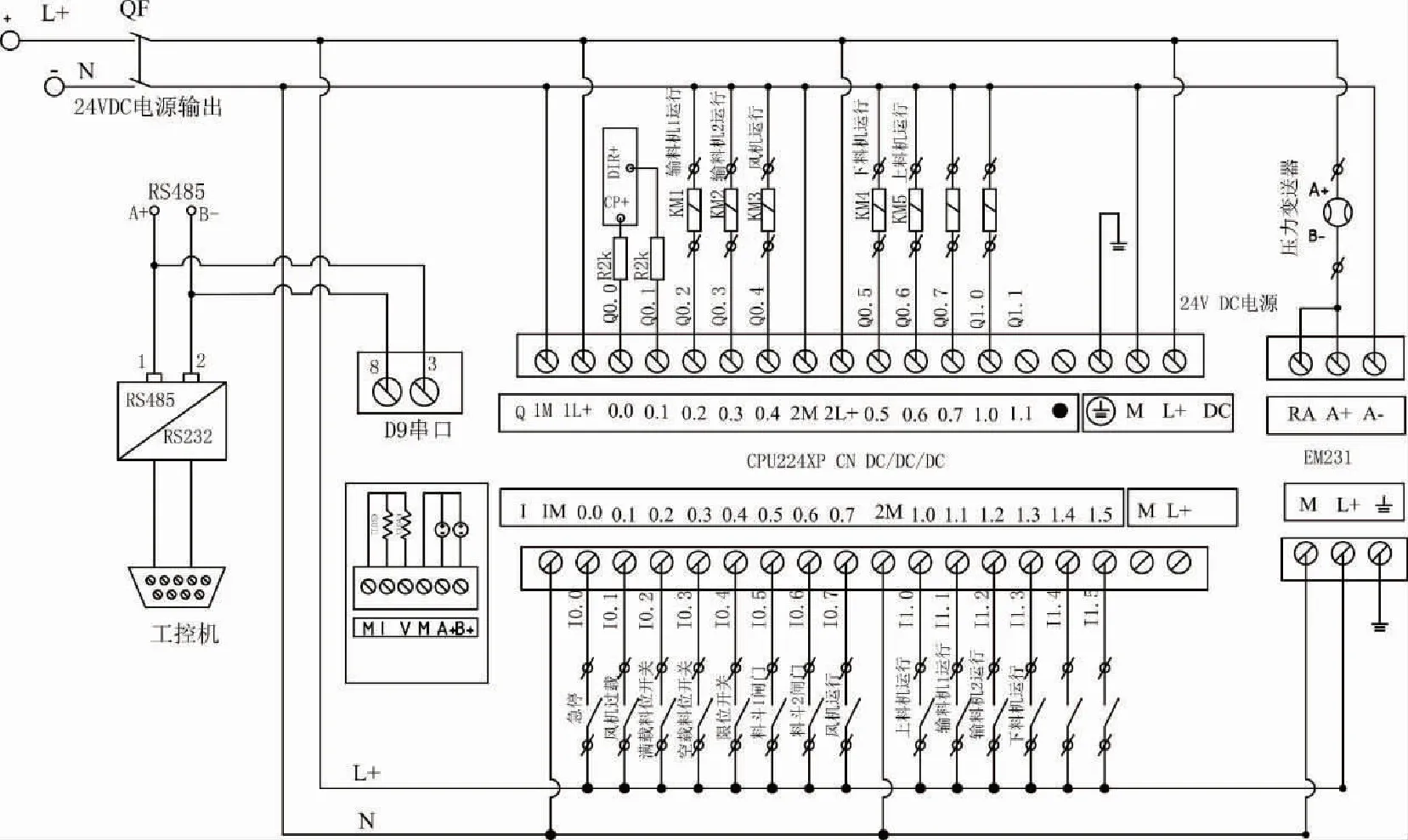
图4 投饲系统控制电路图Fig.4 Control circuit diagram of feeding system
投饲分配器由步进电动机控制,通过驱动器驱动步进电动机运转,滑动头沿着分配箱体可以在360°范围内旋转到任意一个出料口,每个出料口通过管道输送到不同的养殖网箱。风机和输料机连接变频器,可以根据输送距离不同方便调节风量和下料速度。在风机出风口处安装一压力传感器,控制系统根据输送管中压力的反馈量进行闭环控制调节螺旋输料机的转速,控制气料混合管中下料量,维持气力投饲系统工作稳定。
2.2 软件设计
控制软件LabWindows CVI平台开发,可运行于Windows操作系统等上。控制软件采用图形化人机交互技术,界面友好,数据清晰明了,操作方便,能满足既定功能。软件设计主要包括网箱养殖参数设置、投喂控制、数据记录、报告打印等功能,为水产养殖饲料投喂及产能分析提供数据支撑。
自动投饲系统控制流程如图5所示,风机等设备工作前必须完成自检工作,自检信号由上位机发出,PLC检测到自检信号开始自检,此时分配器步进电机旋转寻找零位,分配器转动触发接近开关向PLC发出零位信号,此时完成自检扫孔工作,PLC反馈复位。自检完成后各设备进入待机状态,下料机开启。投饲动作前需要在上位机预先开启风机,并设置风机转速,待风机正常开启后方可开始投饲工作。投饲前需要提前设置以下数据:投饲目标网箱号、选择某个输料机开启、输料机转速设定、喂料输送时间。数据设置完毕后,点击投饲动作按钮,PLC自动完成目标投饲。一个目标投喂结束转换另一个目标投喂时,分配器步进电机旋转到达目标网箱开关位置,到位信号反馈给PLC后,风机转速恢复到用户设置转速,同时选定投饲的输料机开启且根据设置的转速运行,到达设置的输料时间,输料机停止喂料,整个投饲工作完成[21-23]。
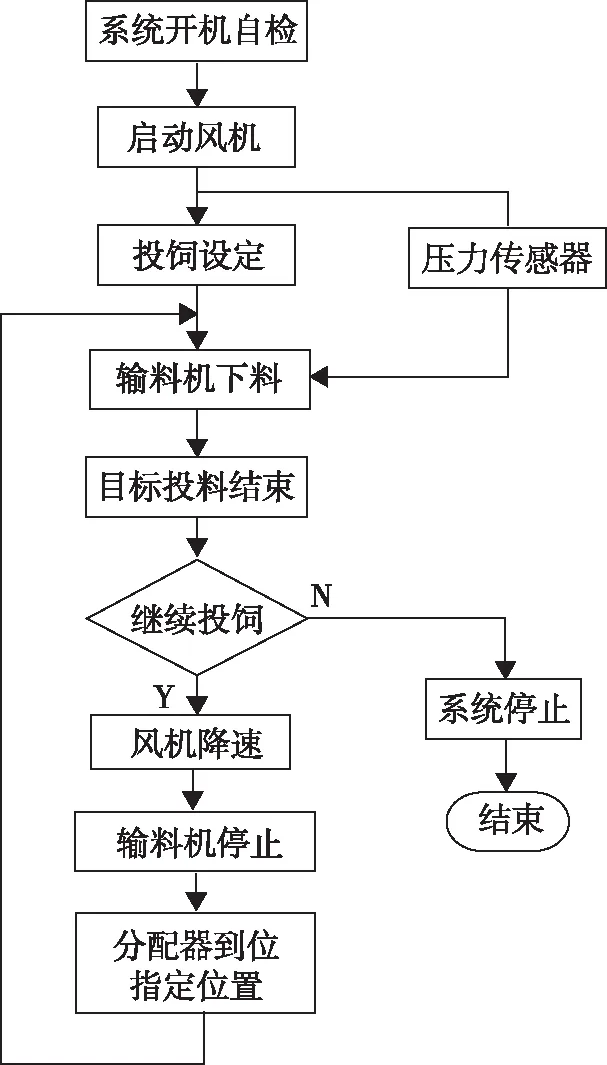
图5 投饲系统控制流程图Fig.5 Control flow chart of feeding system
3 系统试验及结果分析
3.1 系统试验
根据水产行业标准对该投饲系统进行了性能试验,主要测试投饲系统效率、运行稳定性、饲料输送过程破碎率。投饲输送管道长度350 m,输送管内径68 mm,管道弯曲半径为10倍管道直径,管道弯头3个,管道水平爬坡最大高度为300 mm。试验采用国内生产的粒径分别为6 mm、8 mm、10 mm的3种规格鱼用颗粒饲料,每袋25 kg,颗粒饲料平均容重为0.69 kg/L,试验环境温度26~30 ℃,相对湿度60%,管道末端采用透气布袋取样饲料颗粒,用颗粒粒径1/2大小的纱网筛分,分出半颗粒和粉末,计算破碎率,系统试验记录如表1所示。颗粒破碎率计算公式为:
W=G1/G0×100%
(3)
式中:W—颗粒饲料破碎率;G1—颗粒粉末和半颗粒质量,kg;G0—试验物料质量,kg。

表1 投饲系统试验记录
3.2 结果与分析
根据系统试验记录,3种不同粒径的颗粒饲料,在相同输送距离下,最小投饲量平均为523.2 kg/h,最大投饲量平均为568.2 kg/h,符合系统参数设计要求。测试的饲料粒径越大,投饲量越小,投饲效率越低,这是由于输送物料的特性不同,输送能力也会有很大变化,通常在较低输送压力下,物料的粒径对输送量影响不大,但在较高输送压力下,粒径越小,输送量越大,试验数据与实际情况比较吻合。另外,该投饲系统在相同输送距离情况下,饲料粒径为10 mm时,平均破碎率为1.12%,比粒径 6 mm的饲料破碎率0.27%要增大很多,相比参考文献[24]中300 m投饲破碎率0.7%,破碎率也有所不同。这是因为影响饲料破碎率的因素很多,包括输送速度、饲料颗粒粒径、管道布置形式等,粒径大小对破碎率的影响主要是基于强度的尺寸效应,颗粒越小其强度测定值越大,在输送中越不易破碎,颗粒越大越易破碎,另外,不同种类的饲料其特性也有很大不同,膨化饲料相比缓沉饲料其颗粒强度要小,破碎率要高,不能简单对比,需要区别对待[24-30]。气送输送投饲系统是一个综合性工程,涉及流体力学、材料科学、自动化技术,因此,设计时一般是综合考虑各种参数设计,在满足养殖工艺要求前提下,要求安全性和实用性,尽量提高投饲系统效率,减少饲料破碎率,减少能耗,增加养殖经济效益。
4 结论
该自动投饲系统通过集成养殖平台管理功能,基于气力输送和计算机控制技术进行远距离输送投喂、集中自动控制。根据输送管道压力实时调节螺旋输送机下料速度,控制系统下料量,避免发生堵料现象,运行过程系统运行平稳,进一步提高了投饲系统的稳定性和实用性。该网箱养殖投饲平台采用浮式组合结构,提高了作业平台的稳定性,整体平台利用船舶拖至指定水域并与锚泊系统相连,可以用于海上或者大型湖泊养殖的日常居住和作业功能,系统平台还具备水面航行功能,增加了养殖作业的灵活性和适用性。
□
猜你喜欢
新农村(浙江)(2022年5期)2022-05-19
渔业现代化(2022年1期)2022-03-10
湖南农业(2021年11期)2022-01-09
中国食用菌(2021年10期)2021-11-04
重庆科技学院学报(自然科学版)(2021年3期)2021-07-03
昆钢科技(2021年6期)2021-03-09
汽车零部件(2020年9期)2020-09-27
农业科技与装备(2018年1期)2018-12-10
科技视界(2018年8期)2018-06-08
北京航空航天大学学报(2017年2期)2017-11-24