用于浅水养殖的低可视度水下摄像系统研究
2020-11-06 01:41车彦翮盛智彬胡金通
渔业现代化 2020年5期
车彦翮,刘 畅 ,盛智彬 ,胡金通
(1 江苏自动化研究所,江苏 连云港 222061; 2 江苏海洋大学机械与海洋工程学院,江苏 连云港 222005)
作为水产养殖产量大国,中国水产品获取方式已逐渐由“捕捞为主”转变为“养殖为主”[1]。受养殖环境的影响,养殖水质能见度低、不利于实时的人工监测,急需一种低可视度水下摄像系统。目前,水下摄像系统主要包括:水下摄像机、图像声呐和激光成像设备[2]。传统水下摄像机成像分辨率高,但对水体可视度要求高[3],只适合监测水体能见度高的养殖环境;图像声呐作用距离远,对水体能见度要求不高,但成像分辨率低,只适合大面积大水域的养殖场所监测[4-6];激光成像设备成像分辨率高,对水体可视度要求低,但价格昂贵,专业性强,难以推广[7]。
综合以上设备优缺点,以传统水下摄像机为主体,设计了一种低可视度水下摄像系统,对低可视度水下环境进行针对性设计,用于实时监测低可视度水下环境,提高养殖成功率、规避养殖风险。并且,本设计的成品小巧便携,方便操作,造价也远低于图像声呐和水下激光成像的设备。
1 设计思路
淡水养殖最主要的水质污染是有机物污染[8]。有机物污染大部分是水体富营养化后产生的大量水藻、鱼虾粪便等不溶于水的杂质,大量杂质悬浮,导致水体能见度一般只有5~12 cm[9]。普通布局的水下摄像机上搭载的水下灯会把那些杂质照得很亮(图1),并干扰摄像头的正常对焦,使得摄像头对焦在被照亮的水中杂质上,这就导致水下摄像机成像模糊,难以得到被测物的像差,图像很难清晰[10]。
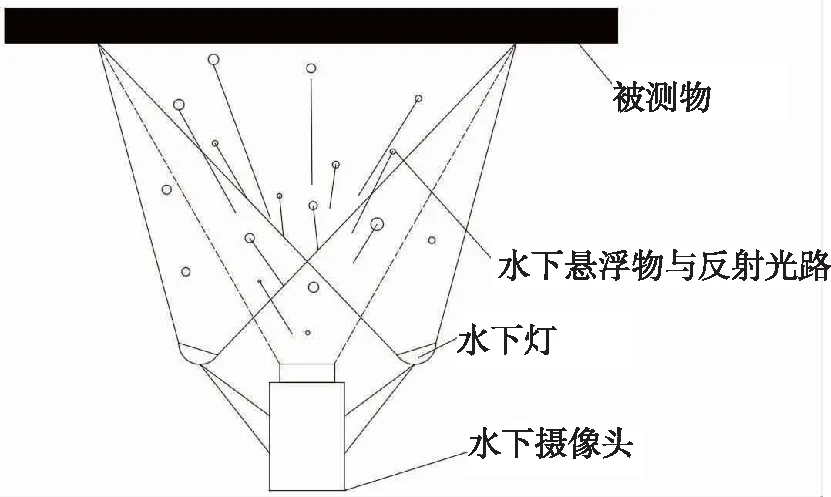
图1 普通灯光布置方案Fig.1 General lighting arrangement scheme
蒋新松[10]的灯光布局方案提出了一种水下照明方式,即将水下灯布置于水下目标附近,能显著减弱水中悬浮物产生的“后向散射”现象,增大被照物的相差,使摄像头不易自动对焦在被照亮的水中杂质上(图2)。
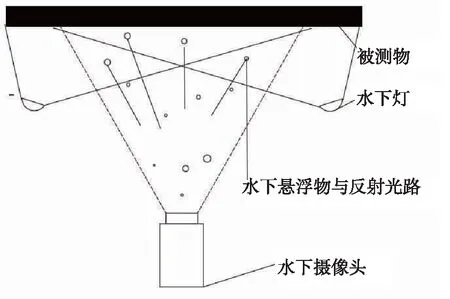
图2 灯光优化布置方案Fig.2 Lighting optimization arrangement scheme
如果水体能见度非常低(10 cm以下),则需要给水下摄像头前安装一个清水舱,清水舱内盛清水,用来替代或隔绝摄像头观测路径上的污水,大幅减弱甚至消除污水对成像的影响。达到未加清水舱时能见度在15~20 cm时的观测效果(图3)。

图3 加装清水舱效果Fig.3 Effect of fresh water tank
2 设计方案
2.1 系统的设计要求
根据水产养殖的要求设计制作了一款低可视度水体观测设备方案。如图4所示,设备在不使用时可以将延伸臂和水下灯向后折叠,缩短碳纤维杆,清水仓可拆,方便用户在设备闲置时放置。如图5所示,设备在使用时需要将延伸臂和水下灯折叠至合适位置,按观测需要伸长碳纤维杆,安装/不安装清水仓,接入手机/平板,连接电源,在放入养殖池中进行观测。

图4 折叠模式下的摄像系统Fig.4 Camera system in folding mode

图5 工作模式下的摄像系统Fig.5 Camera system in operating mode
2.2 系统组成
如图6 所示,根据低可视度水下摄像系统技术要求,本方案由水上和水下两部分组成。水上部分由移动设备(手机/平板)、高频PWM调光器、Wi-Fi中继器组成,摄像头采用USB Video Class(UVC)协议通过USB OTG协议和手机/平板/Wi-Fi中继器的USB口连接,支持UVC协议的设备可以直接连接摄像头,部分不支持UVC协议的设备就需要使用Wi-Fi中继器进行连接[11-12]。水下部分由水密连接器、水下灯模块、水下摄像头系统、防水结构、水下灯支架结构、支撑结构等部分组成。手机/平板与水下通过USB弹簧屏蔽线穿过伸缩杆与水下摄像头进行连接,高频PWM调光器通过双芯弹簧线穿过伸缩杆与水下灯进行连接,手机/平板/Wi-Fi中继器在伸缩杆末端有相应的卡槽,电池装在一个斜挎包中随身携带。
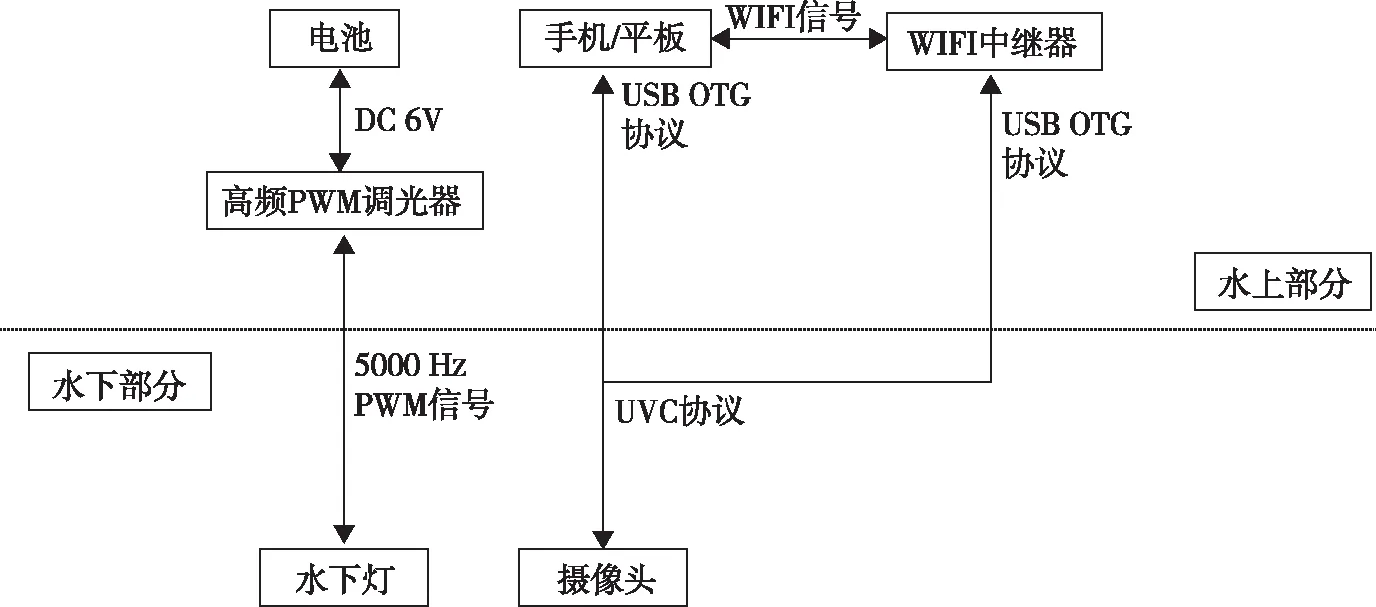
图6 系统组成Fig.6 System composition
2.3 照明系统
2.3.1 水下灯外壳和灯珠
水下灯外壳由一整个铝合金圆柱一体切削制成,从前到后分别由压环、高透凸透镜、灯珠、散热灯台、LED驱动电路、后盖和水密接头组成(图7)。虽然自然光线/人造光射入水体后,水下透过的光都有一定程度的退化,但是因为系统的成像距离不超过20 cm,水对光的退化可以忽略不计。由于方案所选择的COMS模组在自然光条件下色彩还原度、对比度等参数最为优秀,因此本系统采用最接近自然光的6 700 K色温的灯珠作为系统光源。
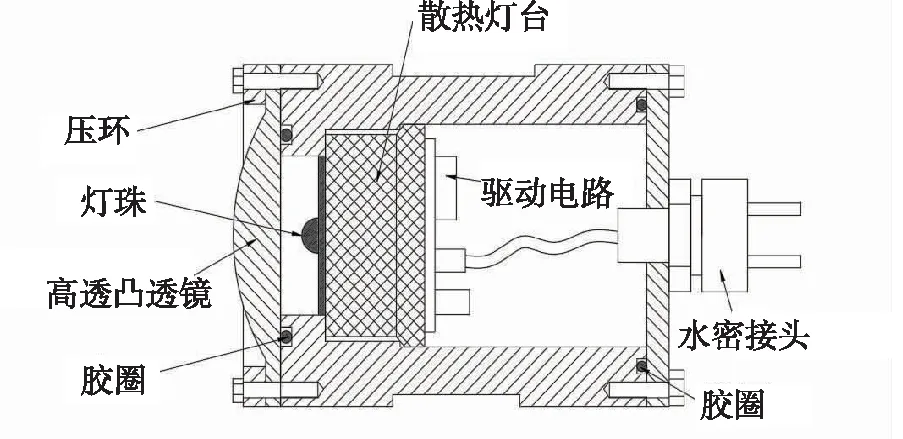
图7 水下灯装配示意图Fig.7 Assembly diagram of underwater lamp
2.3.2 调光器
调光器件选用PWM调光方案,用以保证灯光系统光谱特性不变。但是由于线材、灯珠驱动板上电容参数等一系列因素,两个水下灯参数不可能完全一致,导致两个水下灯虽然属于同一个PWM调光器的控制,但是依然会出现两灯对PWM信号响应时间不一致的情况(图8),黑条纹代表高电平,白条纹代表低电平。
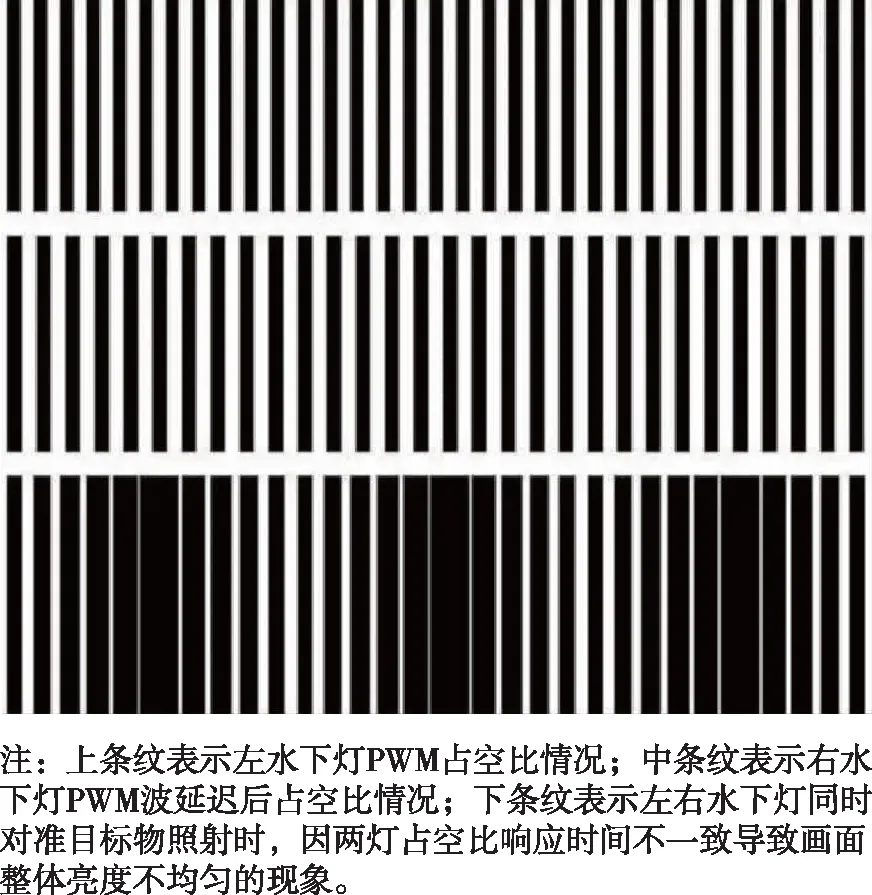
图8 摩尔纹Fig.8 Moire effect
“摩尔纹”不但影响系统显示效果,而且造成的显示闪烁也会使用户感到不适[13],根据IEEE std 1789 2015标准[14],当PWM频率≥1 250 Hz时,频闪对人健康影响可以忽略不计。因此初步选定PWM频率≥1 250 Hz,进行试验,发现PWM波频率为5 kHz时,摩尔纹消失。因此选用5 kHz作为PWM调光器的PWM波频率。
PWM调光器由NE555定时器组成(图9)。PWM调光电路本质上是由施密特触发电路经RC积分电路接回输入端构成的多谐振荡电路,因此将NE555的6脚和2脚接在一起组成施密特触发电路,然后输出接入由RP1和C1组成的RC积分电路接回输入组成PWM调光电路。
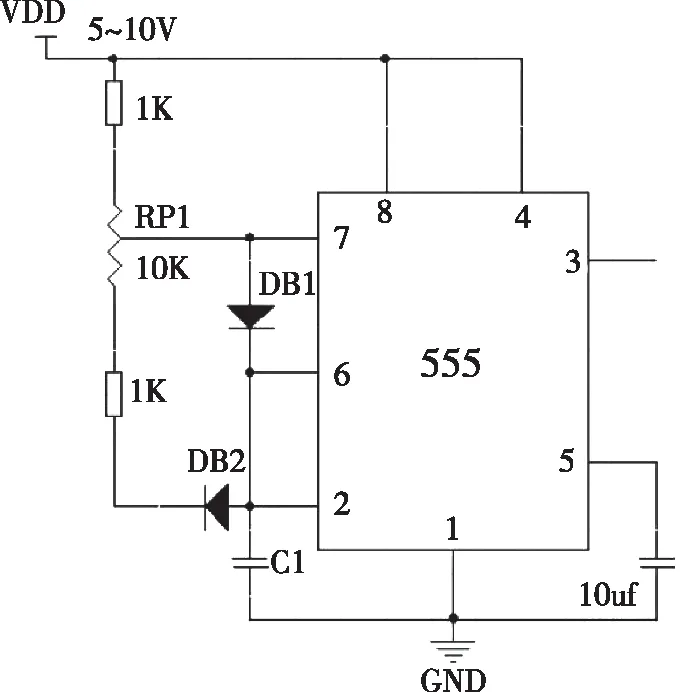
图9 由NE555定时器组成的PWM调光器电路图Fig.9 PWM dimmer circuit diagram composed of NE555 timer
由文献[15]可知PWM频率:
(1)
式中:f为PWM调光器的频率,kHz;T为PWM调光器周期,s;(RA+RB)为RP1旋钮式电位器和两个1 kΩ阻值电阻的和,Ω;C1为调频电容,μF;其中RP1最大阻值为10 kΩ的旋钮式电位器,负责调节PWM信号占空比,也就是灯光亮度,调光器的PWM信号频率由电容C1决定。本电路中,振荡频率设置为f=5 kHz ,由公式(1)可计算出C1≈8 μF。
2.4 摄像头系统
采用低感光摄像头模组,模组最大环境感光0.01 Lx,使得成像系统在同等环境照度下成像产生的噪点更少,暗光细节更加充分,同时具备不开灯或低亮度下清晰成像的能力[16-17],如图10 所示(环境光照度<0.5 Lx)。对于某些对光照敏感的养殖产品,可以不用开灯或使用低亮度模式避免影响养殖产品。

图10 摄像头开关灯实拍图Fig.10 Actual filming effect of turn down/up light
2.5 摄像头传输通讯
摄像头的传输方案采用USB Video Class(UVC)协议,特点是:1)覆盖全面,目前主流操作系统都已提供UVC设备驱动,并且集成在系统内核中;2)使用方便,符合UVC规格的硬件设备不需要安装任何的驱动程序下即可在主机中正常使用;3)由于使用了带有UVC协议的摄像头,本方案可以用任意支持USB OTG协议的设备,如手机、平板、电脑、Wi-Fi路由器等作为视频终端,极大提高了本方案的拓展性。
3 水下校色和实际拍摄质量
3.1 摄像头校色处理
水产养殖池中除了不可溶的污染物,还有一系列由氮化合物、可溶无机物、重金属离子等可溶的污染物组成,其中有些可溶污染物会对水体的透光性、吸光性造成影响,导致在水产养殖池中的水下图像大部分呈黄绿色。 为了解决水下图像颜色失真的问题,在完成原理论证和样机制造后,将用标准灰度卡和24色原色卡在接近养殖池水质和使用深度的水池对设备进行校色处理,然后从后期软件中导出校色参数,写入摄像头驱动中。经过校色处理以后,相比于不校色前,色偏得到了改善,成像的观感有了很大提升,细节也更加突出[18]。
3.2 摄像头校色前后对比
图11 a和图12 a所示,说明摄像头在空气中的色偏很小,甚至不需要进行校色处理。图11 b和图12 b所示,在水下环境中摄像头的色偏问题严重,对摄像头进行校色处理后,显示效果良好,基本还原了色彩的本色,说明了对水下摄像头进行校色,有助于提升用户观感,提升摄像头的还原度、对比度,提升成像细节。
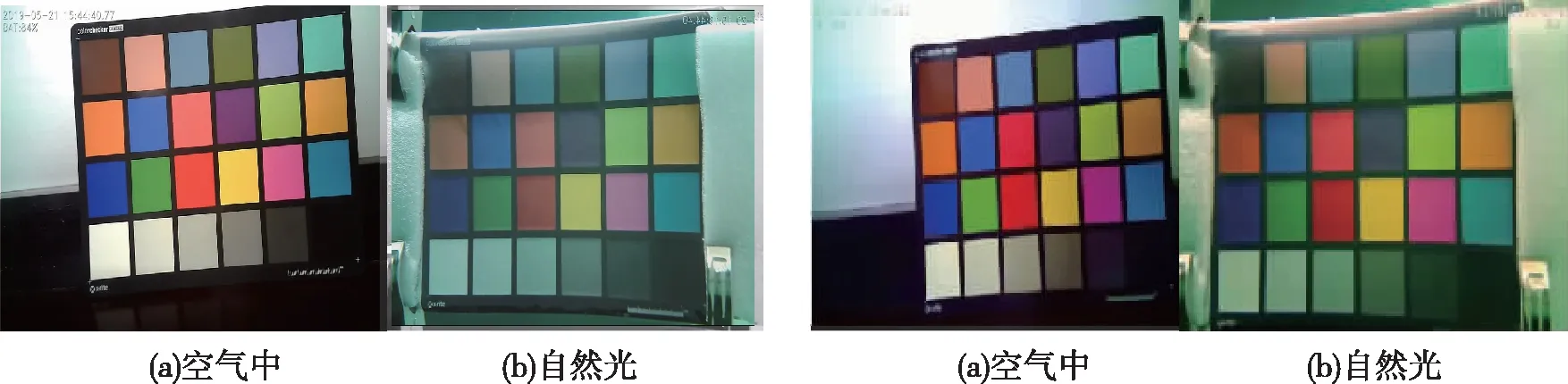
图11 水下拍摄校色前的24色色卡 图12 水下拍摄校色后的24色色卡
3.3 摄像头校色后的实拍效果
为了更好地说明本设计的摄像系统相较于其他设备拍摄的水下图像有较好的成像效果,利用连云港赣榆佳信养殖场购买的水下成像设备在与图13相同的水池环境下进行测试,拍摄效果如图14所示。
图13 连云港赣榆佳信养殖场实拍图Fig.13 Shooting for Lianyungang Jaxin farm

图14 同一池塘不同水下成像设备实拍图Fig.14 Underwater imaging equipment in the same pond
对两种成像设备获取的水下图像图14 a和图14 b分别计算其亮度均值、标准差、信息熵等几项基本评价指标。
(1)亮度均值。亮度均值表示图像的平均亮度。图像太亮或太暗都会影响人们的视觉效果甚至导致图像细节模糊,通常情况下,水下图像平均亮度越大,图像的质量就相对越好。亮度均值的计算公式表示为:
(2)
式中:M、N表示图像的大小,pixel;I(i,j)表示第i行、第j列的像素值,pixel;m表示亮度均值。
(2)标准差。标准差表示图像灰度值相对于平均值的离散程度。标准差越大表示图像灰度层次越丰富,图像细节更加容易识别,即图像质量越好。图像标准差的计算公式如下:
(3)
式中:M、N表示图像的大小,pixel;I(i,j) 表示第i行、第j列的像素值,pixel;m表示亮度均值;s表示标准差。
(3)信息熵。信息熵表示图像的平均信息量。该指标从信息论的角度对图像信息进行衡量,通常情况下,信息熵越大表示图像包含的信息越丰富。信息熵的计算公式如下:
(4)
式中:pi表示图像中第i个灰度级的出现概率;灰度级区间的取值范围为[0,255];e表示信息熵,bit。
(4)UCIQE(水下彩色图像质量评价)和UIQM(水下图像质量评估)。此外,本研究还采用了常用的两种无参考水下图像质量评价方法,即UCIQE[19]和UIQM[20]对两种水下成像设备的水下图像质量进行测评,评分越高越好。
测评结果如表1所示。低可视度水下摄像系统在任意一项评测指标中均高于与之对比的传统水下成像设备,其中最主要的是UCIQE和UIQM指标,两者是当前最常用的两种无参考水下图像质量评价方法,UCIQE指标拟合了水下图像的色度、饱和度和对比度等分量,UIQM指标则将图像的色彩、清晰度和对比度等测量分量作为评价依据。UCIQE和UIQM指标高,说明系统在低可视度水下所拍摄图像的各项参数均强于传统水下成像设备所拍摄的图像。如图14所示,相比传统水下摄像机低可视度水下摄像系统能更好还原图像细节,成像清晰,能看清虾线等细节,达到了设计要求。但是系统仍然存在中心过曝、暗部噪点过多、解析力不足的缺点,需要引入合适的水下图像增强算法弥补这一缺点。

表1 两种设备成像质量对比
4 结论
通过合理规划照明系统和摄像头的相对位置,增设清水仓,使用低照度摄像头和对摄像头进行校色的方式,使得传统水下摄像机具备了对低可视度水体中的目标物实时观测能力。大量实地测试结果表明,低可视度水下摄像头能清晰分辨水体能见度<10 cm,1 cm大小虾的虾线,满足水产养殖现场监测的实际要求。通过设计过程中的探索,得出传统水下摄像机要想实现低可视度水下目标探测,需要具备3个必要条件,即合理布局的光路、搭载具备低感光能力的感光元器件和使用水下图像增强算法。
□
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
航天返回与遥感(2022年4期)2022-09-03
建材发展导向(2022年2期)2022-03-08
建材发展导向(2022年2期)2022-03-08
汽车工程师(2021年12期)2022-01-18
建材发展导向(2021年14期)2021-08-23
家庭影院技术(2021年6期)2021-07-28
摄影之友(影像视觉)(2019年3期)2019-03-30
投资北京(2018年10期)2018-12-29
小天使·六年级语数英综合(2017年5期)2017-05-27