
图书馆座位智能借还书系统研究∗
2020-11-04 10:47冯银花
图书馆学刊 2020年10期
冯银花
(南京信息工程大学图书馆,江苏 南京210044)
随着计算机、物联网技术的发展,图书馆智能化建设如火如荼地进行,图书馆界对于人工智能的研究主要集中在图书馆的智能服务方面[1],如智能咨询机器人、智能座位预约、智能盘点机器人、RFID 智能书架等。关于图书馆书库智能盘点、智能书架、智能借还等方面的研究主要集中于RFID技术,如电子科技大学申晓亮[2]利用超高频RFID技术研究图书自助借还系统的软硬件架构,开发应用程序实现了图书的自助流通管理;武汉科技大学王光辉[3]在图书馆管理中运用RFID 技术,设计了自助借还系统、图书整架系统和智能门禁系统。RFID技术通过在图书中粘贴电子标签进行图书通讯,以实现快速馆藏清点、读者自助借还、安全防盗、快速准确的数据库检查和更新功能等,可提高馆员的工作效率,加强图书藏、阅、借一体化的功能,增加图书馆的安全性、准确性、可靠性和扩展性。但RFID电子标签与磁条比成本高,实际应用中RFID 信道存在较高的误码率[2],图书标签易出现串读漏读;图书自助定位不够准确,易引起图书错架乱架[4],需要管理员协助解决问题。目前图书馆人才队伍建设处于发展初期,无法完全配合RFID技术解决问题。基于此,笔者设计了图书馆座位智能借还书系统,该系统不涉及RFID 技术,而是由机器人与传输带协助实现读者在座位上借还书,即图书通过机器人在书库自动存取、通过传输带在书库与座位之间流通。读者在阅览室借还书无需离开座位,获取纸质图书如同网络资源一样便捷,节约了时间,提高了图书馆纸质馆藏借阅率。
1 座位智能借还书系统的可行性分析
1.1 图书智能出入库
2018 年京东物流“亚洲一号”无人仓正式亮相[5],掀起物流业人工智能的高潮,无人仓上千个机器人相互配合完成商品的出入库与装载,由小型机器人将商品分拣至相应的转运包裹,中型机器人对转运包裹进行再次分配与打包,大型机器人将最终的包裹放入传输带运至库房外的运输车上,无人仓效率是传统仓库的10 倍。假设图书馆书库是物流仓库,可实现机器人管理图书出入库,实践中图书与商品相比体积小、重量轻、抗撞击性强,图书的出入库管理较商品容易许多,因此在技术上图书智能出入库管理是完全可行的。
1.2 图书智能传输
无人餐厅[6]采用自动传菜系统实现菜品在厨房出菜口与餐桌之间的传输,消费者入座后进行手机扫码点餐,厨师将其菜品做好后放入传输带玻璃容器从厨房传输至餐桌。玻璃容器设置传感模块、驱动模块、信号接收模块等,当容器感应到餐桌二维码立刻停止运输,消费者将菜品取走,自动传菜系统节省餐厅人力,节约消费者等待时间。图书馆读者座位与书库出口之间也可运用类似传输原理运书,图书比菜品更易于运输,无人餐厅成熟的传菜系统为图书智能传输提供实践基础。
2 座位智能借还书模块介绍
2.1 智能控制系统
智能控制系统提供了一个信息集成、反馈、分析为一体的平台[7],本控制系统主要完成馆藏图书存取与传输带运书两部分任务。书库图书存取由控制系统指挥机器人完成,传输带运书由自启动电机带动滚轮转动完成,两个过程都需要监控设备(C-MOS摄像头、激光扫描仪)协助完成,摄像头采集传输带运行实况,激光扫描仪采集图书运输轨迹,如图1所示。

图1 智能控制系统整体框架
近年来机器视觉技术被广泛运用于生产流水线,本系统利用机器视觉完成传输系统实况监测与问题报警。如图1 所示,传输带安装了多个CMOS 摄像头采集图片,图片上传控制系统进行分析,它是智能控制系统的“眼”。智能控制系统分析图片预警流程如图2所示,如果摄像头拍摄单张图片中图书数量>5,控制中心将标红该条传输线,后续路径规划会避让该线路;图片中传输带与样本模型图片差异若大于30%(如传输带滚轮变形、挡板掀倒等),系统传输线路图中该支线将会闪动并报警,运维人员到现场查看实况;摄像头拍摄图片中若出现除图书以外的异物(如人为将其他物体带入传输带),控制系统将启动楼层传输带报警系统,楼层巡视人员到现场查看情况。
传输带上激光扫描仪实时扫描传输带上运输的书盒,将扫描结果传给智能控制系统。运输途中图书与书盒二维码进行绑定,可获得图书实时位置。系统根据图书规划路径判断是否需要转向、终止传输,需要选择“是”,启动电动装置改变图书传输方向,不需要选择“否”,图书继续传输,过程如图3所示。

图2 图像分析

图3 扫码识别分析
2.2 座位智能借还书流程
即读者通过手机扫描座位二维码将借还书请求发送至控制系统,如图4 所示,借书时控制系统会调用书目数据库以获取图书馆藏信息(可借复本、馆藏地址),当可借复本大于0 时,控制系统接受借书请求。具体而言,首先系统将图书、读者、座位三者信息绑定,其次指挥机器人到图书馆藏地址取书,机器人取书完毕后将书放入书盒运输,最后由传输带将图书运输至目标座位。还书情况类似:读者座位扫码发送还书请求,控制系统给图书分配馆藏地址,目标地址产生后,读者将图书放入传输带上的书盒里,再由传输带运回书库。入库前机器人会对图书进行损坏检测(重量、封面检测),检测通过后机器人将图书存入目标馆藏地址,读者还书成功;检测不通过,图书被机器人放入旧书回收处,系统向读者发送损坏图书赔偿金额。

图4 座位借还书流程
2.3 书库图书自动存取
2.3.1 图书物理地址
本系统借用笔者前期研究成果[8],将书架、书库分成格子状,布置如图5、6所示。书架每层分成大小一致的格子,按照格子的层数(第几层)以及格数(第几格)给格子编号;情况类似,按照书架位列书库的排数与列数给每个书架编号,如第几排几列,将书架编号生成二维码置于书架一侧地面,“书架编号+书格编号”为书格中图书物理地址。例如图5书架中标黄图书书格编号为0606,图6显示该书架编号为0402,标黄图书在系统的物理地址为04020606。图书馆藏不按中图法排架,由控制系统按编码规则分配地址。
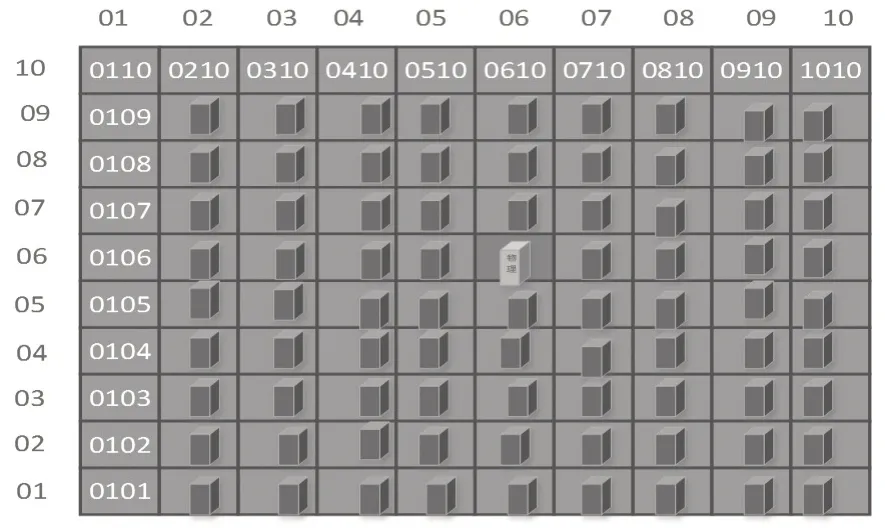
图5 格子书架

图6 格子书库
2.3.2 机器人存取图书
书库机器人地面移动方式为90°、180°直转、原地旋转,垂直高度自动举升,机器人激光扫描仪实现二维码导航,激光障碍传感器与机械防撞装置给机器人提供安全防护[9]。当控制系统向机器人发送存取书指令,机器人利用激光扫描仪扫描地面二维码导航至目的书架,再利用距离测量器测量垂直方向爬行的高度h,相对于编号起点的水平方向距离S。假设图书所在书格为第n 层第m格,书格固定宽度为a、层高固定为b,当m-1<S/a<m+1,且n-1<h/b<n+1时,机器人停止移动,并利用机械手夹持装置存取图书。
2.4 传输带运书
图书在书库与座位之间通过传输带流通,智能控制系统借助传输带监控设备、通讯设备、动作设备将图书准确送达读者座位。为避免运输中图书的损坏,本系统将图书装入书盒运输,每个书盒设置唯一的二维码,运输中图书、座位、书盒三者信息会进行绑定。机器人将书放入书盒,利用机械手夹持装置[10]将书盒夹入传输带,运输前控制系统以座位为目的地规划书盒运输路径,根据运输距离、运输带拥堵情况、运输分岔路口数量,系统规划最佳路径与备选路径,运输途中若遇运输线拥堵、报警等突发情况,系统会及时改选备选路径。
2.4.1 传输带轨道
传输带轨道由独立转动的滚轮并排构成(见图7),传输带滚轮采用空心管,既省材料又减重量,滚轮直径与转速根据实际需求设定。每个滚轮由电机带动,采用直流无刷电机,电压低、平稳、噪音低。当摄像头监测到书盒时,控制中心发出弱电信号,驱动器通电启动电机,滚轮转动,传输带工作;当传输带无书盒时,控制中心断电,驱动器断电,电机停止转动,传输带停止。

图7 传输带轨道
2.4.2 传输带围挡
传输带轨道两侧有宽度一致的长方形薄板围挡,薄板与底部轨道架通过拉杆相连,左右两侧薄板间相互独立,座位处围挡薄板可向外侧打开(见图8)。薄板上安装C-MOS摄像头与激光扫描仪,摄像头为智能控制系统提供视频监控,实时监测传输带实况;激光扫描仪用于识别书盒二维码,实时定位运输中图书。

图8 传输带围挡
2.4.3 传输分岔路口
智能控制系统方向控制设备由电机、推杆以及一系列通讯设备组成,电机与推杆安装在分岔路口围挡上,推杆在分岔路口将书盒往规划路径方向推进(见图9)。当书盒运输至分岔路口时,围挡上激光扫描仪扫描书盒二维码,获得系统规划的书盒路径,当规划路径显示需要转向时,系统向围挡上电机驱动器发出弱电信号,电机转动产生转矩支起推杆,将书盒往规划方向推进,书盒完成转向后继续前进。

图9 传输带分岔路口
2.4.4 传输终点
控制系统通过激光扫描仪扫码识别书盒,定位图书实时位置,当图书到达目标座位时,控制系统启动围挡薄板上的电机,支起薄板底部拉杆,将薄板向外侧掀开,架在座位与轨道之间形成滑板,同时轨道另一侧薄板上电机启动支起推杆,将书盒推离轨道,通过滑板滑向座位(见图10)。读者在座位上取书,智能控制系统解绑书盒、图书、座位三者信息,读者个人管理系统中添加图书借阅信息。图书被取,薄板上电机驱动器断电,电机停止转动,拉杆收紧,打开的薄板立起,空书盒重回轨道,被传输带运回原地。
若图书超过10 分钟未取,拉杆收紧、薄板立起,书盒中图书被运回书库。智能控制系统重新给图书分配空余书格,机器人利用夹持装置将书盒放回原地,取出图书并将其放回系统分配的书格。座位还书与图书超时未取类似,读者线上还书请求发送后,控制系统将空书盒运至读者座位处,读者将图书放入书盒,传输带再将图书运回书库。
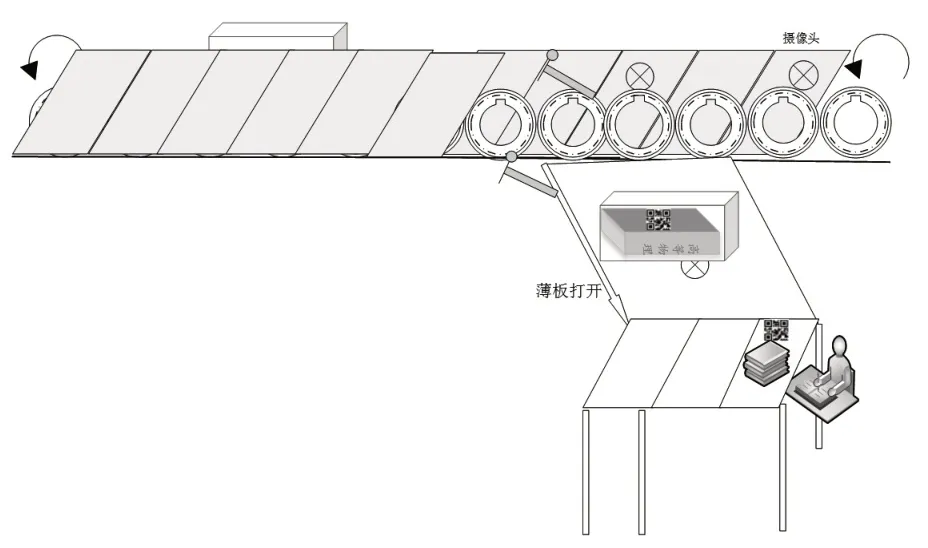
图10 传输带终点
3 传输系统馆内布局
3.1 传输线路布局
相对于馆内其它建筑,密集书库是一个独立的建筑结构,馆舍建筑呈现“回”字形,楼层传输线路俯视图如图11 所示,密集书库坐落于“回”字形中央,在每个楼层有东南西北4 个出口,类似湖心亭结构。机器人穿梭于密集书库,通过出口与各楼层传输带主线衔接。传输带主线沿“回”字形内侧围成一圈,传输主线分出许多支线,从主线往外延伸,绕一圈再回到主线,使传输带形成一个闭环,这样有利于图书循环流通。
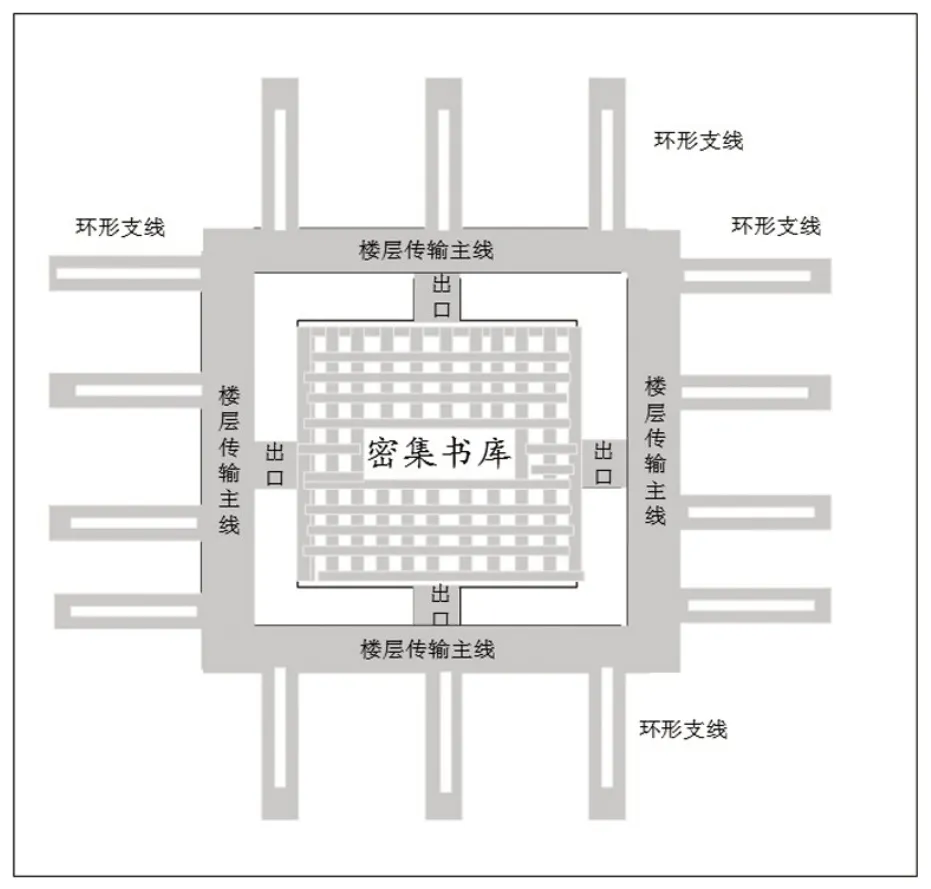
图11 楼层传
3.2 座位布局

图12 座位布局示意
4 传输管理系统
4.1 座位管理
座位管理主要功能是对图书馆座位资源后台数据库的管理与座位资源的信息管理。座位资源后台数据库管理主要负责后台所有数据的修改和维护,包括读者座位权限修改、指定管理员等,该模块由超级管理员维护。座位资源信息管理主要负责阅览室座位信息的查询、增加和删除等,维护座位资源的更新,该模块由管理员完成[11]。
4.2 读者管理
读者管理包括读者个人信息的管理与读者借阅信息的管理,读者个人信息管理由用户与管理员共同完成[11],个人密码、个人证件照片、出生年月、籍贯、学号、专业、联系方式等信息由个人完善,管理员负责个人信息的审核与维护,保证读者信息有效。读者借阅信息管理主要由管理员完成,负责读者借阅信息分析,包括读者座位借还书信息与违约信息。系统统计读者借还书信息用于分析读者阅读兴趣,主动向读者推送新书。对于座位借还书超时违约行为,系统规定:读者座位借书超时未取发生1次,推送警告消息;发生2次,禁止座位借还书一个月;3次以上暂停座位借还书权限,读者本人向图书馆递交情况说明,并在馆内承担一定义务劳动,如修补损坏图书、整理书桌、打扫地面等才能恢复座位借还书权限。
4.3 图书管理
图书管理是典型的信息管理系统,主要包括后台的数据库建设和维护以及前台应用程序的设计,对于前者,要求数据格式统一、多元,安全性、可靠性高;对于后者,要求应用程序功能完备,操作简单实用[12]。
后台数据库是一个实体,它能够合理保管数据内容,按照一定的结构集中应用系统的数据,使之更便于统一管理[7]。本系统数据实体包括图书题名、编著、出版发行项、中图分类号、书刊状态、封面、出版年份、ISBN 及定价、物理地址等。为尽可能体现实体特征,加入了详细的关键章节、提要文摘附注、导语、载体形态项等信息(见图13)。

图13 图书信息
图书借还应用程序界面如图14、15所示,图书题名、编著、出版发行项、中图分类号等均可作为检索项,如选择检索项为“题名”,输入“人工智能”,检索出所有题名包含“人工智能”的图书,图书下方有编著、出版社、索书号、条码号、馆藏复本、可借复本等,点击蓝色字样“提要文摘附注”,链接更详细的文字介绍。读者座位扫码后点击图书右侧红色按钮,向系统发送图书借阅请求。信息智能控制系统接收请求后调用书目数据库,若馆藏可借复本数量大于0,将读者信息、图书信息、座位信息绑定,调用书库机器人取书。还书情况类似,读者座位扫码后点击“我的图书馆”,查看借阅历史栏图书列表,点击图书右侧“还书”按钮,向系统发送还书请求,控制系统接收请求,给图书分配空余书格,运空书盒至座位,将图书运回书库,指挥机器人将图书存入分配的书格。
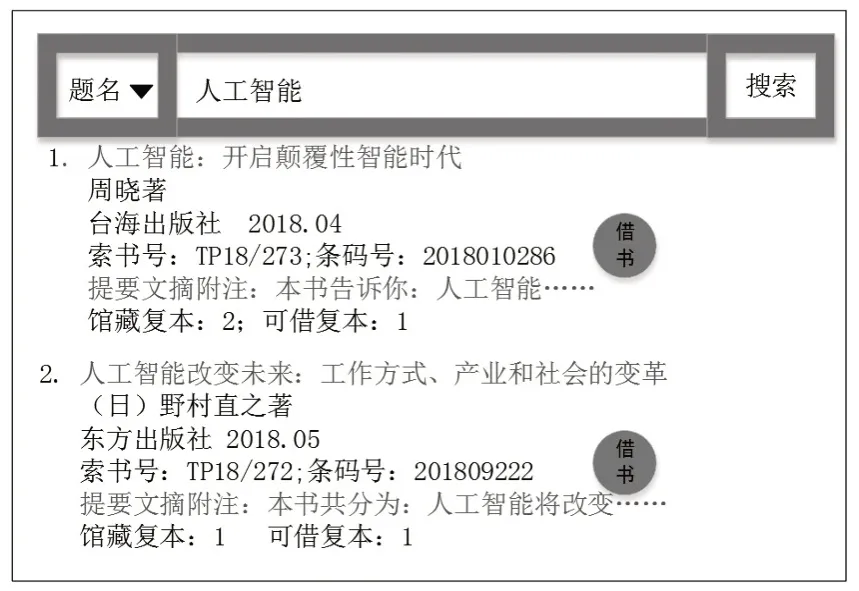
图14 借书
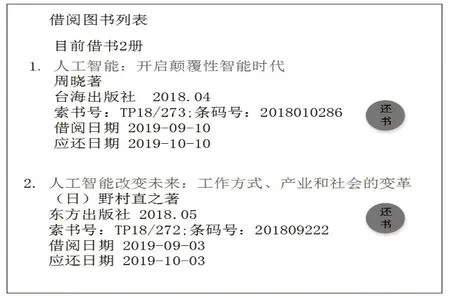
图15 还书
5 总结
图书馆座位智能借还书系统实现了一站式服务,增强了图书馆智慧服务的体验效果,可以提高读者借还书效率,增加图书借阅量,开拓了图书馆智慧服务的新领域。与RFID技术相比,本系统具有以下优势:RFID 技术是基于图书电子标签与RFID 阅读器通讯[13]完成图书清点等工作,RFID 技术通讯系统对图书本身有依赖,实际运行中需要不断检测与维护图书电子标签的通讯质量,而本系统密集书库机器人能够根据智能控制系统指示,自动完成图书清点、整理、上架、存取,系统通讯对图书没依赖。但本系统在实际运用中也存在许多不足之处,如运输过程中传输带滚轮转动有噪音,需在不影响传输速度的基础上进行减噪处理;传输带穿插于座位之间,占用自习座位空间,考试高峰期图书馆座位资源供不应求的局面更严峻;座位智能借还系统涉及馆舍改造、楼层重新布局,需要大量经费,会给原本资金紧张的图书馆带来更大压力。因此座位借还书系统需分步分区域实施,从局部到整体,在实践中不断完善。
猜你喜欢
哈哈画报(2022年5期)2022-07-11
党员干部之友(2021年2期)2021-03-03
家庭影院技术(2020年12期)2021-01-18
山西青年(2020年14期)2020-12-08
中国交通信息化(2019年2期)2019-03-25
小天使·一年级语数英综合(2019年2期)2019-01-10
电子制作(2018年18期)2018-11-14
家庭影院技术(2017年12期)2017-02-06
新世纪图书馆(2016年12期)2017-01-05
作文通讯·初中版(2016年10期)2016-11-12
