车桥耦合下公路桥梁长标距动态应变的求解方法
2020-11-03 08:22吴必涛邹友泉陈梦成
江苏大学学报(自然科学版) 2020年5期
吴必涛, 邹友泉, 陈梦成, 吴 刚
(1. 江西赣粤高速博士后工作站, 江西 南昌 330013; 2. 华东交通大学 土木建筑学院, 江西 南昌 330013)
应变传感器根据标距的长短分为长标距和短标距两种.短标距应变计常用于测量结构应力应变.长标距应变是指结构监测区域的平均应变,能够反映结构监测区域的整体信息,长标距应变计主要用于结构损伤识别和结构变形监测.长标距光纤应变传感器主要用于桥梁结构健康监测,相对于传统点式应变传感器,具有标距大、抗电磁干扰、防水、质量轻等优点,多个长标距光纤应变传感器串联可以组成分布式传感监测网,可对结构损伤及变形进行识别和监测[1-3].
LI S.Z.等[1]研发了一种长标距FBG(fiber bragg grating)传感器,提出了一种新颖的识别桥梁结构局部损伤的方法.这种传感技术基于分布式长标距应变传感器,具有较高的测试精度和动态测试的能力.WU B.T.等[4]利用分布式长标距传感技术,对多跨连续梁进行了损伤识别研究,提出基于分布式长标距应变影响线的桥梁损伤识别方法,并采用车桥动力缩尺模型试验,研究了车辆参数对该损伤识别方法的影响.ZHOU Z.W.等[5]研究了多点激励下基于分布式长标距应变传感技术的桥梁损伤识别方法.魏洋等[6]采用长标距传感器对桥梁关键截面的应力监测数据与理论数据进行对比分析,结果表明长标距光纤光栅传感器具有实测数据稳定、可靠、精确和准分布式等优点,能实现对桥梁应力、温度等多项内容的实时监测,是一种有效的结构监测传感器.郭宗莲等[7]在试验用混凝土T型梁上,安装标距长度为50 cm的FBG传感器,反算结构挠度,结果与百分表所测到的挠度值误差小于5%.
桥梁的动态响应是受车桥相互作用影响的,其中车速、车辆参数、桥梁参数和路面不平顺对桥梁的动态响应有着较大影响.车桥耦合作用分析模型能考虑不同路面不平顺情况下车辆过桥的桥梁动态响应,是评估桥梁冲击系数的主要手段之一[8-9].梁栋等[10]根据车桥耦合模型试验,采用实际通行状态下桥梁的动挠度,提出了基于实际车流的在役公路桥梁承载力动态评定方法.通常直接求解车桥耦合运动方程的数值计算分析一般只能得到桥梁跨上某节点的竖向位移、加速度和应变响应;长标距应变响应是一个区域的平均应变,长标距动态应变时程响应不能通过车桥耦合方法直接求解得到.
因此,需要研究车桥耦合振动下桥梁长标距应变的求解方法,并考虑车辆参数对长标距应变的影响.笔者对车桥耦合下公路桥梁长标距动态应变求解方法进行研究,对比车桥耦合作用下长标距应变和点式应变时程曲线,根据实际工程中最长1 m的长标距传感器,研究车桥相互作用下长标距应变的测试精度,为使用长标距应变传感器监测桥梁动态特性提供理论依据.
1 车桥耦合作用下长标距动应变求解
长标距应变传感器测试的示意图如图1所示.当传感器被安放在结构上,可得到传感器标距覆盖范围的平均应变.若将传统的应变计覆盖在损伤部位时,点式应变计会失效.而长标距应变传感器由于标距长,因此能够继续工作,测试出带有损伤信息的平均应变值.此时的平均应变不具有明确的物理意义,但是可以反应结构局部信息,因此可用于监测结构损伤和宏观变形.当采用长标距传感器监测车桥相互作用下的桥梁响应时,长标距应变响应也会受到车桥相互作用的影响.以往研究桥梁动态长标距应变采用的是移动集中力模拟车辆荷载作用在有限元模型上,无法考虑相关车辆因素的影响.
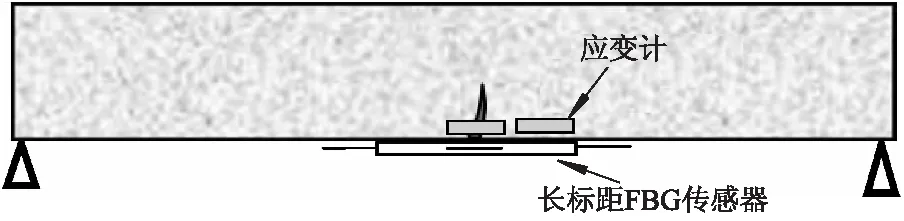
图1 长标距应变传感器测试示意图
针对上述问题,首先研究了车桥耦合作用下桥梁长标距应变时程的求解方法.移动车辆的车速、轴重和轴数等参数对桥梁动力冲击系数有不同程度的影响.基于车桥耦合振动的桥梁冲击系数研究比较多,也相对成熟.为此,笔者选用文献[11]中的三轴车辆参数.九自由度三轴车辆模型[11]如图2所示,图中符号的含义与九自由度三轴车辆参数参见文献[11].
根据车桥耦合振动运动方程,建立了车辆系统和桥梁振动系统的动力方程,分别如下所示:
(1)
(2)
式中:M,C,K分别为车桥系统的质量、阻尼和刚度矩阵;d为车辆子系统位移向量,d=(d1d2d3d4d5d6dvθvφ);Fvg为车辆重力引起的等效结点荷载列向量;Fvr和Fbr为车辆和桥梁接触点之间相互作用力,计算公式如下:
(3)
式中:Nb,Nv分别为桥梁和车辆的形函数;br和vr分别为桥梁和车辆间的接触力列向量,其中
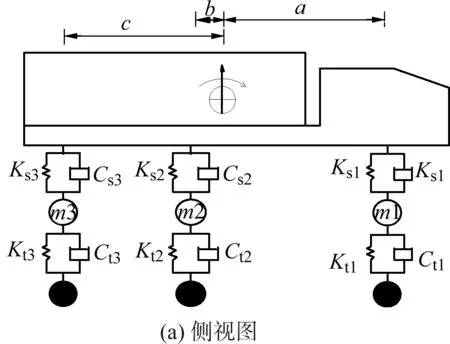
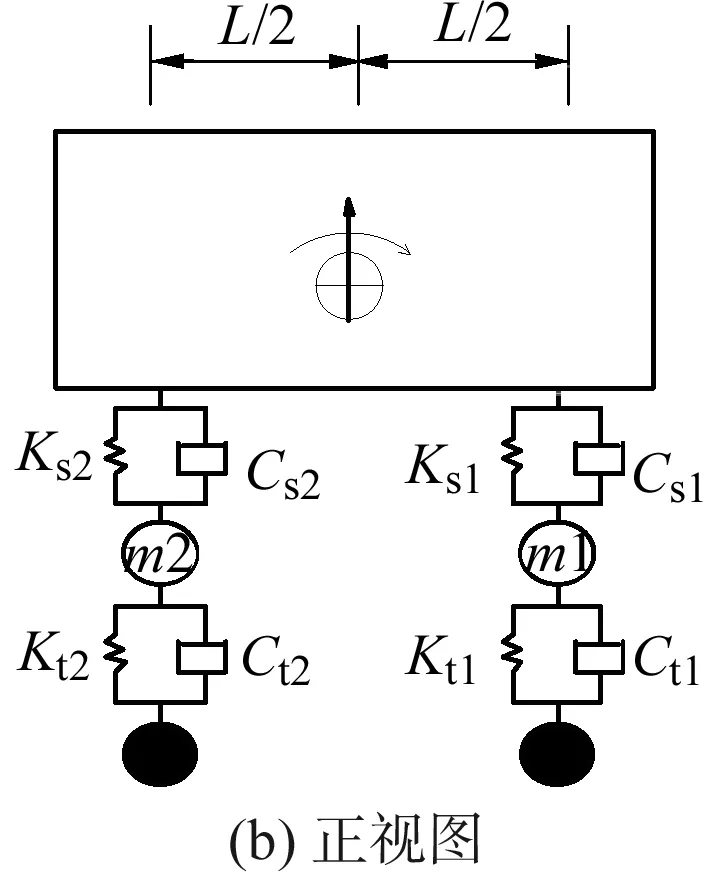
图2 九自由度三轴车辆模型
车轮和桥梁路面在桥面接触点处存在如下的位移关系:
(4)
式中:x为沿桥纵向的坐标;Zai为第i个车轮的竖向位移;Zbi为该车轮接触处桥梁的竖向位移;ri(x)为该接触点路面平顺度.
路面平顺度是车桥耦合振动分析中的一个重要激励源,而且具有较大的随机性.对其进行数值模拟时,一般采用级数方法,生成满足功率谱函数的路面平顺度功率谱,可以用公式来拟合[9].级数方法生成的路面不平顺度曲线公式为
(5)
式中:nk,Δn,N分别为空间频率的采样点、采样的间距以及采样数量;φk为在区间(0, 2π)上的随机相位角.
根据路面不平顺曲线得知,车轮与桥梁接触点处的作用力为
(6)
式中:KLi,CLi分别为车轮下部弹簧的刚度和阻尼.
将式(3),(5)-(6)代入式(1)和(2),整理可得车辆与梁桥系统的耦合动力学方程:
(7)
其中,Cb-b,Cb-v,Cv-b,Kb-b,Kb-v,Kv-b,Fb-r,Fv-r是由车桥耦合效应产生的附加项;矩阵的详细内容参见文献[11].
(8)
因此第k个单元的长标距动应变求解公式为
(9)
桥梁梁底x位置处的点式应变,可以通过挠度二次求导得到,即
(10)
式中:ω(x,t)为沿桥梁方向的桥梁挠度;hk为第k个传感器所在梁段的中和轴与梁底的距离.
从上述计算车桥耦合作用下桥梁长标距动应变的计算公式中可以发现,只要计算出相关10阶模态下的梁底各个节点转角位移时程,即可计算出梁底单元的长标距动应变.笔者采用ANSYS,建立了5片T型梁桥有限元模型,求得其自振频率和振型,并提取了10阶模态的转角位移模态,代替原来的竖向位移模态,组成模态矩阵,求解节点的转角位移时程.
采用MATLAB软件,编制Newmark-β方法,并导入桥梁的模态矩阵,求解动力方程(7),从而获得该桥型在车桥耦合振动作用下的转角位移时程,进而求出T型梁桥的长标距动态应变时程.该模型虽然是T型梁桥,但是同样适用于其他等截面的梁式桥,如箱梁和板桥等.
2 长标距应变时程求解数值算例
2.1 桥梁有限元模型的建立
根据公路桥梁的T型梁通用图集[12],采用有限元软件ANSYS,建立桥梁分析模型,如图3所示.
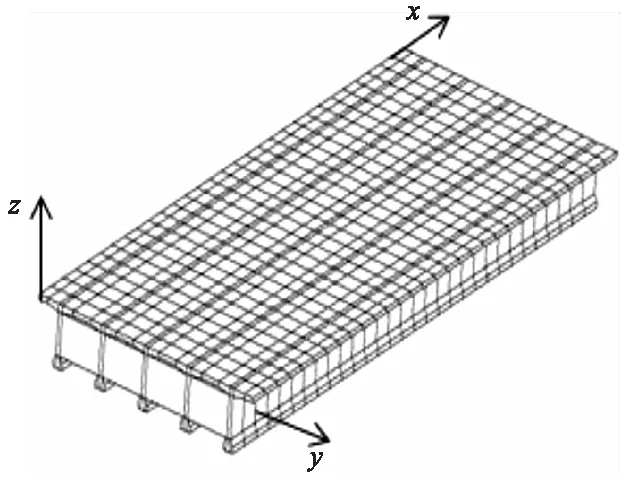
图3 桥梁模型及空间坐标
桥梁有限元模型包括桥面铺装层、5片T型梁和横隔板.单片T型梁的宽度为1.70 m,梁高2.00 m,桥梁总宽度为11.75 m.模型单元坐标系定义如下:纵桥向为x轴,横桥向为y轴,竖桥向为z轴.每片梁节点之间采用刚性连接,不考虑基础的沉降.数值模型材料主要为混凝土,在考虑钢筋对截面的影响时,将其转化为界面刚度进行分析.混凝土材料的弹性模量为3.45×104MPa,泊松比为0.17,密度为2 600 kg·m-3.对有限元模型进行动力特性分析,提取桥梁前10阶转角位移模态,用于车桥耦合计算.长标距传感器在实际测量中最大标距可以达到1 m,因此本研究中桥梁分析模型的单元长度为1 m.
分析过程中,车辆在桥梁横向位置的布置如图4所示.车辆两轴作用在中间第3片梁上,左右轮轴中线距桥梁边缘均为4 975 mm,车轴中心距为1 800 mm;桥梁梁编号从左到右依次为G1,G2,…,G5.路面粗糙度为B级,为相对粗糙的级别.
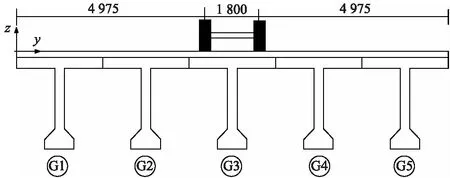
图4 车辆在桥上横向布置位置(单位:mm)
2.2 不同车速下桥梁的长标距动应变
实际车辆的行驶速度是不同的.车辆不同的行驶速度和路面不平顺度会导致车辆对桥梁的动力冲击,笔者研究考虑不同车速(v=10,20,30,40,50和60 m·s-1)下的长标距动态应变时程结果.根据前面的假设,传感器标距为1 m,每片梁安装30个传感器.传感器安装在每片梁的底部,沿桥梁纵向方向布置,全桥5片梁共计安装150个传感器.为了便于说明,本节只提取了每片梁跨中的第16号传感器的长标距应变时程沿桥梁跨径的分布结果,结果如图5所示.图中ε为长标距应变,x为沿桥梁跨径方向坐标.

图5 5片梁跨中长标距动态应变时程结果
由图5可知:车速为10~20 m·s-1时,跨中单元长标距动应变最大值发生在车辆通过跨中时;车速为30~40 m·s-1时,动应变最大值发生在车辆经过桥梁2/3跨径处;车速为50~60 m·s-1时,动应变最大值发生在车辆通过跨中时.说明跨中单元长标距动应变的最大值不一定是车辆在桥梁跨中位置时,也和车速大小有关.5片梁中,G3应变值最大,G2和G4大小相近,G1和G5大小相近,离车道越远,应变越小,这一现象符合桥梁横向分布系数的分布规律.
2.3 跨中长标距应变和点式应变对比
点式应变传感器为常用的应变测试传感器,测试值为某一点的应变,往往具有较高的测试精度,是工程中常用的应力应变传感器.为了研究最长标距1 m长的长标距应变测试的理论精度,本节将G3梁跨中节点的点式应变和跨中单元长标距应变时程曲线进行对比,结果如图6所示.由图6可知,跨中单元长标距动应变和点式的应变峰值很接近.总之,长标距应变时程曲线会比点式应变更为光滑,应变幅值略小于点式应变值,这是由于长标距应变表示的是1 m标距范围内的平均应变.两者最大幅值发生的位置和时刻均相同,说明长标距应变包含了点式应变所具有的动态特征,弹性范围内,长标距动应变仍然具有较高的测试精度.
由图6还可知:当车速为10~30 m·s-1时,两种应变的波动都较大,点式应变的波动比长标距应变更为剧烈,此时应变幅值最大值发生在桥梁2/3跨径处;当车速为40 m·s-1时,最大值发生在5/7跨径处;当车速为50~60 m·s-1时,最大值发生在3/7跨径.
由分析结果可知,应变最大值发生位置随着车速变化发生改变,且发生位置在桥梁3/7~5/7跨径处,两种应变的变化规律基本一致;随着车速增大,两者应变幅值大小越接近.总之,在弹性范围内,长标距应变时程幅值比点式应变时程幅值小,但仍具有一定的测试精度,和点式应变的差值不明显,测试精度和车辆速度有一定的关系,主要是由于波动幅度引起的差异.
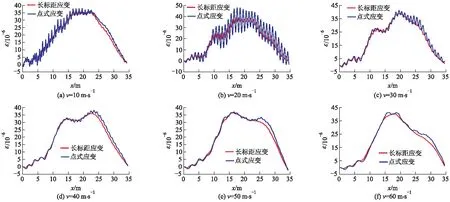
图6 跨中长标距应变和点式应变时程曲线对比
3 结 论
1) 通过与点式应变的对比,验证了本研究中车桥耦合作用下桥梁长标距应变求解方法的可行性,长标距应变与点式应变在不同车速下有一定的差异,这主要是由桥梁振动的波动幅度引起的.
2) 当车速小于20 m·s-1时,点式应变波动比长标距应变大,当车速大于20 m·s-1,两者之间的差异较小;车桥耦合作用下,桥梁应变最大值发生位置随着车速的变化发生改变,发生位置位于桥梁3/7~5/7跨径.
3) 桥梁跨中单元的长标距动应变时程和跨中点式应变时程应变幅值相差不大,长标距应变测试的是测试区域的平均应变,其应变幅值比点式应变略小;两种应变随车速而发生变化的规律基本一致.
猜你喜欢
汽车与新动力(2022年2期)2022-07-21
铁道通信信号(2020年7期)2020-02-06
中国惯性技术学报(2019年6期)2019-03-04
铁道通信信号(2018年10期)2018-12-06
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
中国铁道科学(2015年1期)2015-06-26
——走进广东富华重工制造有限公司
专用车与零部件(2015年9期)2015-03-16
汽车维护与修理(2015年5期)2015-02-28