芦苇高立式沙障成束装置孔隙率控制机构的设计与试验
2020-11-03 08:22张洚宇郑一江余鹏飞
江苏大学学报(自然科学版) 2020年5期
张洚宇, 葛 云, 郑一江, 余鹏飞
(1. 石河子大学 机械电气工程学院, 新疆 石河子 832000; 2. 中国农业机械化科学研究院, 北京 100083)
随着我国经济的持续发展,道路建设与防护一直以来是经济建设的重中之重,沙区道路一直以来饱受风沙威胁,现南疆塔里木盆地南缘在建的和若铁路正面临着严重的风沙困扰.目前,沙区道路的阻沙主要采用高立式沙障和草方格结合的方式,研究[1]表明,芦苇高立式沙障第1年阻沙率达80%,到第5年仍有60%,是一种有效且经济实用、无污染的阻沙护路设施.芦苇高立式沙障要求具有一定的疏透性才能既起到阻沙作用,又保持足够长的阻沙寿命.高立式沙障疏透性是用孔隙率(栅栏孔隙面积与栅栏总面积之比)来评价和设计的,现阶段芦苇高立式沙障的制作全部依靠人工操作,孔隙率也由人工控制完成,费力耗时,成本高昂,急需机械化代替.
目前,国内外学者针对钢筋、钢管等物料的机械化捆扎已有相关研究,如日本公司美克司株式会社研究设计了手持式建筑钢筋施工捆扎机械[2],解决了十字交叉状刚性物料的捆扎问题;美国的SIGNODE公司研究了钢管捆扎机械[3],便于解决钢管的运输和存放;中国农业大学韩鲁佳团队[4]研究了D型打结器结构的分析与参数优化,用于秸秆等打包的捆扎;文献[5]研制了粽子捆扎装置,提高了粽子捆扎的机械化效率.综上可知,现有捆扎机械主要解决了特定物料的机械化捆扎,但研究成果主要集中在如何提高打结器的打结效果和长时间运行稳定性等方面的研究,关于打结之后物料和物料之间关系的研究相对较少,文中设计的芦苇高立式沙障要求先对松散芦苇捆扎成小束,再将芦苇束连接成满足一定孔隙率要求的高立式沙障,而现有机械不能直接应用于芦苇高立式沙障成束及孔隙率控制.因此文中提出一种既能实现芦苇机械化成束,又能保证孔隙率要求的“推送-打结”装置,可显著提高满足孔隙率要求的芦苇高立式沙障制作效率,为风沙区机械阻沙的规模化发展提供参考.
1 芦苇高立式沙障结构参数与分析
芦苇高立式沙障是有效的阻沙结构之一,编排在铁路等重要的基建周边,如图1所示,用来降低沙砾迁移带来的负面影响.
研究[1]表明,具有一定孔隙率的芦苇高立式沙障防沙效果十分理想,孔隙率过低,风沙吹到沙障导致风停沙落,沙砾全部堆积在沙障底部,导致沙障使用年限大幅降低,孔隙率过大又不能有效降低风速,致使沙障功能丧失,因此适当的孔隙率对芦苇高立式沙障至关重要.
目前的芦苇高立式沙障的制作分3步: ① 将散乱的芦苇用铁丝捆扎成束; ② 在需求地布置较粗的铁丝为沙障骨架; ③ 由人工把芦苇束按照所要求的孔隙间距排列编织到铁丝骨架上,形成高立式沙障.

图1 芦苇高立式沙障结构图
依据芦苇高立式沙障孔隙率要求,对孔隙率推送机构功能分析如下: ① 推送机构的行程要满足孔隙率间距的要求,因为铁丝回弹影响,每次推程距离稍大于a+b,a为高立式芦苇沙障孔隙间距,b为高立式芦苇沙障单束芦苇的直径; ② 采用缓推方案,降低芦苇挤伤率; ③ 推送机构具有急回特性,节约时间.
本项目采用凸轮推杆机构作为孔隙率推送机构核心执行部件.研究的目标为孔隙率在50%左右的高立式沙障,芦苇束直径在(35±5)mm.
2 主体结构与孔隙率控制原理
2.1 主体结构
装置主要由推送弧片、凸轮、推杆、拧丝虎口、挡铁组成,如图2所示.
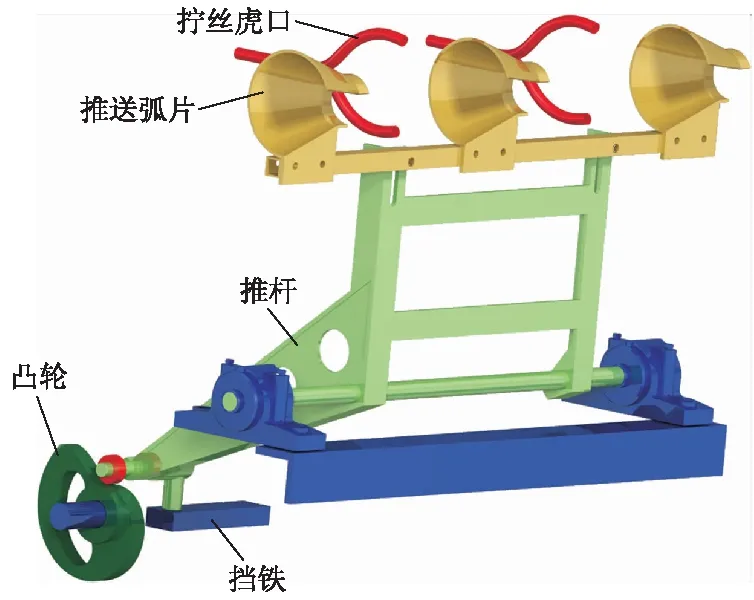
图2 孔隙率控制机构示意图
芦苇高立式沙障制作机械采用一边打结捆扎,一边控制两捆芦苇束之间的孔隙间距的工作方式,形成喂入—推送—捆扎—喂入的工作循环,最后实现连续的具有固定间距孔隙的芦苇束沙障的制作.孔隙率作为芦苇高立式沙障的关键参数,孔隙间距推送机构是沙障制作机械的核心部件之一.
2.2 孔隙率控制原理
拧丝虎口中间穿有铁丝,分别从上下穿出与虎口共同形成一个圆环,拧丝虎口按一定间距穿插排列在推送弧片中间,机具运行时,芦苇从一端穿进拧丝虎口中,凸轮驱动推送弧片作用于芦苇束,间接把拧丝虎口里的铁丝强制拉出,随后拧丝虎口旋转拧丝打结,完成孔隙推送和打结,如图3所示,图中实线为机构运动位置,虚线为前一刻运动位置.

图3 孔隙率控制机构示意图
3 关键部件的设计
3.1 孔隙推送弧片的设计
孔隙推送弧片有着孔隙间距推送和对芦苇束引导聚拢的双重作用,如图4所示.在推送之前,芦苇束要先喂入到推送弧片内,推送弧片是由漏斗形弧片按一定间距排列而成,在弧片之间装有拧丝虎口,由于弧片的漏斗形收口设计,可以保证易松散的芦苇束在送入过程中不会穿插到铁丝外面,保证了芦苇束送入的效率与质量.推送弧片尾部呈直筒圆柱形,以增大推送弧片与芦苇束之间的接触面积,减少推送过程对芦苇的损伤.


图4 孔隙率推送弧片设计参数
3.2 芦苇束推送受力分析与缓推凸轮的设计
3.2.1芦苇束推送受力分析
机构在推送芦苇束形成孔隙率过程中主要受两个方向的力,如图5所示,一个是推送弧片推送芦苇束的推力F,另一个力P为芦苇束将虎口中铁丝拉拽出来,在这两个力的共同作用下可以使松散的芦苇束变的密实,但如果力过大又会把芦苇压断,P为固定值,即铁丝从弯折虎口被拉出的摩擦力,所以力F的大小决定了芦苇束被推送时的受力状态,实现芦苇束既要被顺利推送至指定位置,又不能把芦苇折断,力F的大小主要取决于动力凸轮的轮廓线形状和角速度.

图5 推送过程芦苇束受力示意图
3.2.2缓推急回凸轮机构的设计

凸轮工作过程如图6所示.① 近休止阶段(AB段):凸轮进入近休止阶段,推杆各部分位于初始位置,为芦苇束推送做准备.② 推程阶段(BC段):推程前半段应满足加速度为0的变加速加速运动状态,推程后半程采用加速度减小的加速运动,目的是减小推片对芦苇的损伤.③ 远休止阶段(CD段):推杆进入凸轮的远休止阶段,保持推杆固定的姿态不变动,避免因弹性变化,导致孔隙间距回弹.④ 回程阶段(DA段): 推杆的复位阶段,推杆达到最大行程之后需要恢复原来的状态,为了减小推程阶段对芦苇束受力突变过大,本阶段的回复需要尽可能的快速,增大推程阶段降低加速度.
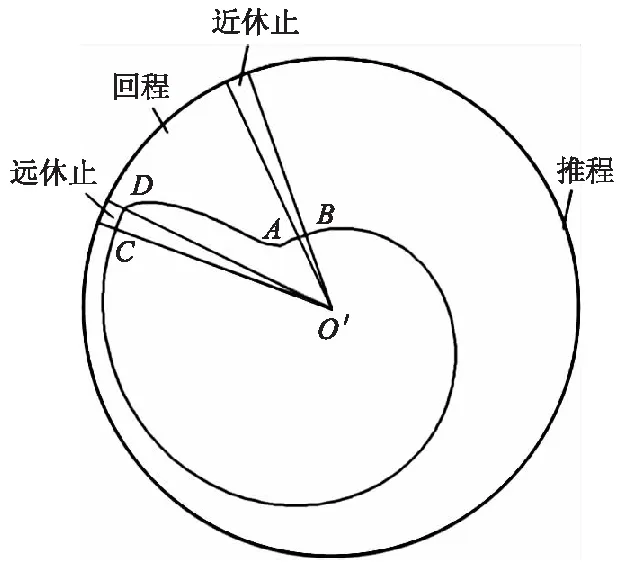
图6 凸轮各工作段
3.2.3凸轮轮廓线的确定
由偏置凸轮的轮廓曲线形状主要取决于从动件的运动规律,因此选取合适的从动件运动规律是设计出合理的凸轮轮廓曲线的关键[8].本设计的芦苇高立式沙障成束装置孔隙率控制机构为低速轻载,直动滚子从动件偏置盘形凸轮理论轮廓线的直角坐标方程[9]为
(1)

直动滚子从动件偏置盘形凸轮实际轮廓线的直角坐标方程[10]为
(2)
式中:
(3)
已知凸轮基圆半径r0=30 mm,直动滚子从动件半径Rt=10mm,当凸轮转过310°时,从动件以等加速等减速规律上升70 mm,当凸轮继续转过5°到315°时,从动件静止不动,凸轮再转过40°到355°时,从动件以余弦加速度规律下降并回到最低位置,凸轮再转过5°时,凸轮静止不动.
3.2.4凸轮的建模与仿真
Matlab是Mathworks公司开发的一款工程计算软件,以矩阵计算为基础,把计算、绘图、仿真等功能融合在一起[11].利用公式(1)-(3)结合Matlab编程绘制了盘形凸轮的理论轮廓线与实际轮廓线,如图7所示,图中最外侧虚线为该凸轮理论轮廓线,内测为凸轮实际轮廓线.

图7 Matlab所得凸轮轮廓线
使用MatLab软件编程得到的凸轮轮廓曲线,同时也得到了凸轮轮廓坐标数据,把数据转换成格式为.txt文件,运用SolidWorks中“插入”—“曲线”—“通过xyz点的曲线”命令绘制凸轮轮廓线并得到实体[12-13],如图8所示.

图8 凸轮图
将所建芦苇束孔隙率控制机构三维模型保存为.txt文件并导入Adams中,添加各实体零件的约束定义,对芦苇高立式沙障成束装置孔隙率控制机构进行虚拟样机仿真试验[14],从而验证所设计凸轮的稳定性和实现孔隙控制的准确性,如图9所示.

图9 Adams建模
在样机仿真中可测得推送弧片中心点的推程距离变化规律,得到推程距离变化规律仿真数据曲线图[15],如图10所示,由图可知,凸轮的推程工作段占整个周期的85%,最大推程为35 mm,由此可知,虚拟样机在试验中推送弧片推程距离与理论设计基本吻合,并能准确地达到所设计的芦苇束推送距离.证明了理论分析的正确性,确保物理样机机构实现的可行性.
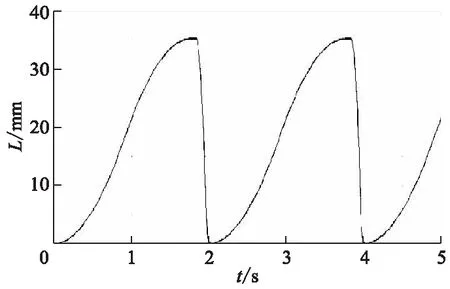
图10 推送弧片中心点的运动仿真结果
3.3 孔隙推杆的设计
为使推送弧片按预定的轨迹运动,采用定点摇摆式推杆机构,与凸轮推程一起决定芦苇束推送间隙,文中采用等臂杠杆机构作为凸轮的推杆,如图11所示,抬臂一端安装凸轮滚子,推臂一端安装推送弧片,推杆与推送弧片之间采用长孔装配,可实现推送弧片的上下微调控制推送间距.由于凸轮回程阶段时间较短,为避免冲击对凸轮的损伤,在凸轮近休止等高处设置回程挡铁,延长凸轮使用寿命.
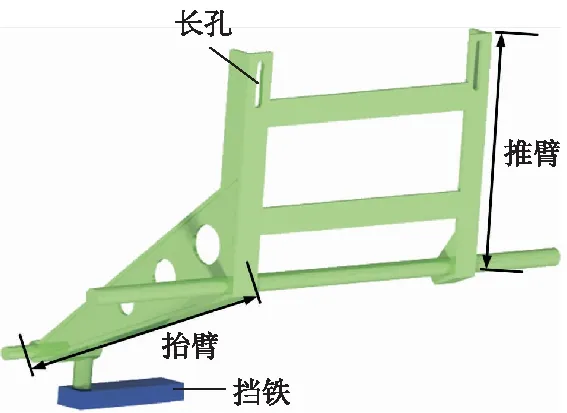
图11 空隙推杆机构示意图
4 孔隙率推送机构试验
为了验证孔隙率控制机构的作业效果,制造出芦苇高立式沙障的物理样机,如图12所示,对设计的孔隙控制机构进行功能性和稳定性试验.试验结果表明,所设计的孔隙控制机构运行平稳.

图12 样机测试与试验
为了进一步验证孔隙率控制机构运动的准确性,从而有效实现芦苇高立式沙障机械化制作,以南疆博斯腾湖芦苇为试验样品进行孔隙率控制试验,在石河子大学校工厂液压实验室进行试验,试验时,孔隙率推送凸轮转速为0.5 rad·s-1,每次喂入芦苇束直径在30~40 mm,本次试验共试验30束芦苇,分成3组进行装置稳定性试验检测,结果如表1所示.

表1 芦苇高立式孔隙率试验数据表
由表1试验结果表明,芦苇束外观完好无损伤,由标准差值可得出,本装置运行偏差保持在一定的可接受范围之内,所得出的孔隙率的偏差率保持在1%左右,符合设计要求.
5 结 论
1) 设计了芦苇高立式沙障机械孔隙率推送机构,通过利用缓推急回凸轮推杆机构,实现了芦苇束孔隙间距推送的目标,提高了芦苇高立式沙障的制作效率.
2) 利用Adams对虚拟样机进行运动仿真,并制造该结构样机进行芦苇束空隙推送试验.仿真和试验结果表明:孔隙率控制机构能够实现芦苇束缓推程急回程特性,推送过程对芦苇无明显挤伤,每组所得出孔隙率在50%左右,偏差率在1%左右,达到预定设计,满足使用要求.
猜你喜欢
宝钢技术(2022年4期)2022-12-23
机械管理开发(2022年5期)2022-07-07
机械制造(2022年3期)2022-04-07
内蒙古林业(2021年6期)2021-06-26
农业工程学报(2019年16期)2019-10-10
制造技术与机床(2019年8期)2019-09-03
中国水土保持(2019年1期)2019-01-20
制造技术与机床(2017年5期)2018-01-19
中国核电(2017年1期)2017-05-17
天津科技大学学报(2015年6期)2015-04-16